Изобретение относится к однофазным синхронным самозапускающимся микродвигателям малой мощности с постоянной частотой вращения и может найти широкое применение, например, в схемах автоматики, электроприводах бытовых приборов - кухонные комбайны, реле времени, микронасосы и т.п.
Известен однофазный синхронный самозапускающийся двигатель, включающий статор с магнитопроводом U-образной формы и двумя катушками возбуждения, цилиндрический ротор в виде диаметрально намагниченного постоянного магнита и блокирующее устройство, предназначенное для запуска ротора в определенном направлении (описание к патенту RU 2251783, МПК 7 Н02К 21/02, 2003.08.28).
Известен синхронный самозапускающийся электродвигатель, включающий цилиндрический ротор в виде диаметрально намагниченного постоянного магнита и статор с двумя обмотками возбуждения от однофазного источника электроэнергии и ступенчатой рабочей поверхностью полюсов (описание к патенту RU 2071629, МПК 6 Н02К 21/18, Н02К 1/14, 1992.09.01).
В известных конструкциях электродвигателей решается, главным образом, задача надежной фиксации ротора за счет повышения фиксирующего момента, при этом проблема повышения надежности пуска не решена. Процесс синхронизации в известных устройствах является практически не управляемым. Это снижает надежность и эксплутационные характеристики электродвигателей.
Задача изобретения - создание синхронного однофазного самозапускающегося электродвигателя.
Технический результат от использования изобретения - повышение надежности запуска.
Технический результат достигается тем, что в синхронном самозапускающемся электродвигателе, включающем цилиндрический ротор в виде диаметрально намагниченного постоянного магнита и статор с двумя обмотками возбуждения от однофазного источника электроэнергии и ступенчатой рабочей поверхностью полюсов, выводы обмоток возбуждения присоединены к одному из полюсов источника электроэнергии через тиристоры, управляемые датчиком положения ротора, у которого при запуске сигнальный элемент удален от чувствительных элементов на угловое расстояние, равное углам α и π-α пересечения осей полюсов статора и ротора в фиксированном положении последнего.
Угол α устанавливается равным 0,3-0,5 углового расстояния дуги ступени рабочей поверхности статора, образующей с поверхностью ротора минимальный зазор.
Чувствительные элементы датчика положения ротора в электродвигателе могут быть выполнены в виде приемника и излучателя оптопары, между которыми на валу ротора размещен цилиндр с сигнальным элементом в виде плоскости соединения образующих его прозрачного и светонепроницаемого полуцилиндров.
Чувствительные элементы датчика положения ротора могут быть выполнены в виде датчиков ЭДС Холла, между которыми на валу ротора размещен постоянный магнит с сигнальным элементом, совпадающим с его нейтральной осью.
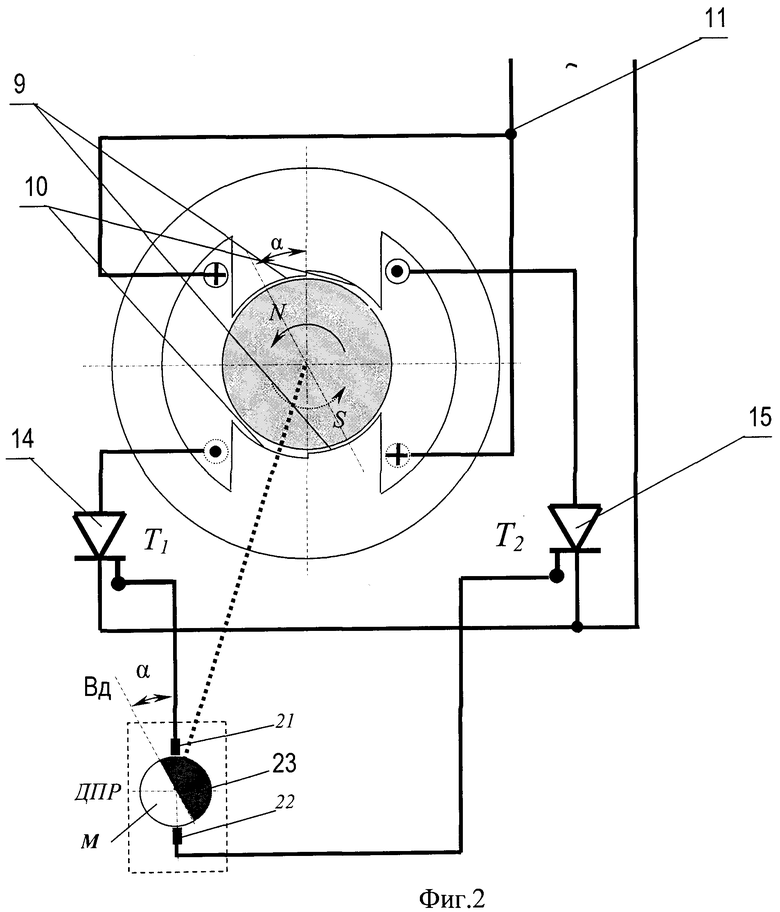
На фиг.1 представлено схематичное изображение синхронного самозапускающегося электродвигателя с магнитопроводом статора U-образной формы с чувствительными элементами в виде оптопары, на фиг.2 - круглой формы с чувствительными элементами в виде датчика ЭДС Холла.
Электродвигатель содержит цилиндрический ротор 1 в виде диаметрально намагничеснного постоянного магнита с полюсами N, S (Вм - ось полюсов ротора), установленный на валу 2 электродвигателя, и статор 3 с двумя обмотками возбуждения 4,5 на магнитопроводе 6 и явно выраженными полюсами 7, 8 (Bc - ось полюсов статора). Рабочая поверхность полюсов 7, 8 статора выполнена ступенчатой, образуя дугами 9, 10 соответственно минимальный (δ min) и максимальный (δ max) воздушные зазоры с рабочей цилиндрической поверхностью ротора.
Одна пара (не показаны) выводов обмоток 4, 5 соединена в общую точку 11 и присоединена к одному полюсу источника электроэнергии (не показан). Другая пара выводов 12, 13 соответственно обмоток 4, 5 присоединена к второму полюсу источника электроэнергии через тиристоры 14, 15, управляемые датчиком положения ротора (ДПР), у которого при запуске угловое расстояние между чувствительным и сигнальным элементами равно углу α пересечения оси полюсов статора Вс и оси полюсов ротора Вм в фиксированном положении последнего. Угол α, например, может быть равным 0,3-0,5 углового расстояния дуги 9.
Чувствительные элементы датчика положения ротора могут быть выполнены в виде неподвижно закрепленных приемника 16 и излучателя 17 оптопары, между которыми на валу 2 ротора 1 размещен цилиндр с сигнальным элементом в виде плоскости 18 соединения образующих его прозрачного 19 и светонепроницаемого 20 полуцилиндров.
В конструкции двигателя может использоваться датчик положения ротора с чувствительными элементами в виде датчиков ЭДС Холла 21, 22, между которыми на валу 2 ротора размещается постоянный магнит М с сигнальным элементом 23, совпадающим с его нейтральной осью Вд.
В момент включения двигателя (положение ротора показано на фиг.1) тиристор 15 закрыт, тиристор 14 открыт. Начинается вращение ротора 1 и сигнального элемента 18 против часовой стрелки. При повороте сигнального элемента 18 на угол α с чувствительного элемента 16 появляется сигнал на открытие тиристора 15, с чувствительного элемента 17 - на закрытие тиристора 14. При дальнейшем повороте ротора 1 и сигнального элемента 18 на угол π-α с чувствительного элемента 17 появляется сигнал на открытие тиристора 14 и т.д. Таким образом, обеспечивается максимальный пусковой момент и осуществляется беспрепятственный запуск двигателя. Далее, при достижении импульсами, поступающими с чувствительных элементов, частоты, равной или кратной частоте в сети, двигатель входит в синхронизм.
Аналогично осуществляются запуск и работа электродвигателя при вращении ротора по часовой стрелке, а также в случае использования датчика положения ротора (ДПР) с чувствительными элементами в виде датчиков ЭДС Холла.
Приведенные выше примеры использования датчиков положения ротора в заявляемой конструкции не исчерпывают все возможные варианты. В качестве датчиков положения ротора могут использоваться и другие конструкции, в которых в качестве чувствительных элементов применяются магнитодиоды, магнитосопротивления, радиационные датчики и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОФАЗНЫЙ СИНХРОННЫЙ САМОЗАПУСКАЮЩИЙСЯ ДВИГАТЕЛЬ | 1992 |
|
RU2071629C1 |
| ОДНОФАЗНЫЙ СИНХРОННЫЙ САМОЗАПУСКАЮЩИЙСЯ ДВИГАТЕЛЬ | 2003 |
|
RU2251783C1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| РЕПУЛЬСИОННЫЙ ВЕНТИЛЬНЫЙ РЕВЕРСИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2187190C2 |
| БЕСКОЛЛЕКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2563974C1 |
| Способ настройки вентильного электродвигателя | 1986 |
|
SU1467687A1 |
| САМОЗАПУСКАЮЩИЙСЯ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1969 |
|
SU251674A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| Вентильный индукторный электродвигатель | 1987 |
|
SU1464264A1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
Изобретение относится к области электротехники и может быть использовано, например, в схемах автоматики, электроприводах бытовых приборов для кухонных комбайнов, реле времени, микронасосов и т.п. Техническим результатом является повышение надежности запуска. Синхронный самозапускающийся электродвигатель содержит цилиндрический ротор в виде диаметрально намагниченного постоянного магнита и статор с двумя обмотками возбуждения от однофазного источника электроэнергии и ступенчатой рабочей поверхностью полюсов. Выводы обмоток возбуждения присоединены к одному из полюсов источника электроэнергии через тиристоры, управляемые датчиком положения ротора (ДПР). Сигнальный элемент ДПР при запуске удален от чувствительных элементов на угловое расстояние, равное углам α и π-α пересечения осей полюсов статора и ротора в фиксированном положении последнего. Угол α равен 0,3-0,5 углового расстояния дуги ступени рабочей поверхности статора, образующей с поверхностью ротора минимальный воздушный зазор. Чувствительные элементы ДПР выполнены в виде приемника и излучателя оптопары, между которыми на валу ротора размещен цилиндр с сигнальным элементом в виде плоскости соединения образующих его прозрачного и светонепроницаемого полуцилиндров, или в виде датчиков ЭДС Холла, между которыми на валу ротора размещен постоянный магнит с сигнальным элементом, совпадающим с его нейтральной осью. 2 з.п. ф-лы, 2 ил.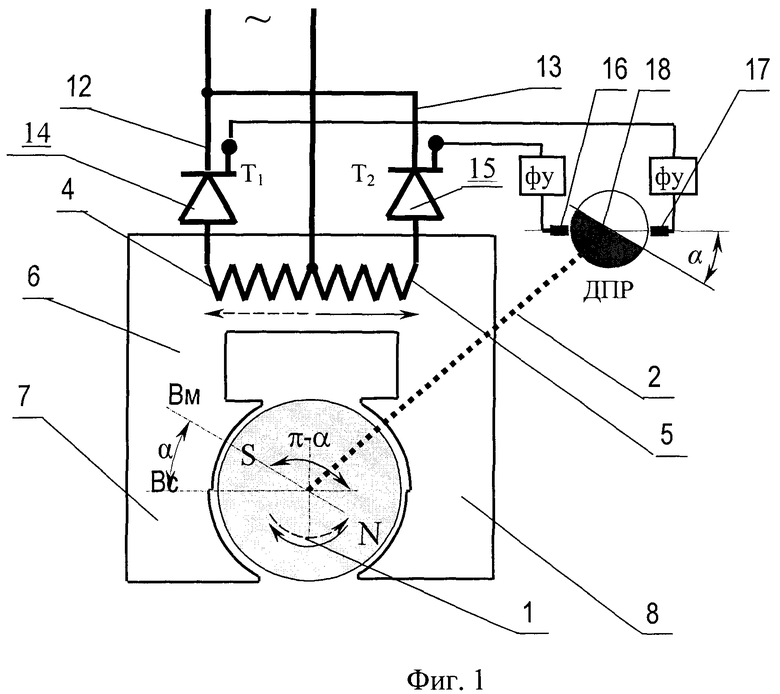
| ОДНОФАЗНЫЙ СИНХРОННЫЙ САМОЗАПУСКАЮЩИЙСЯ ДВИГАТЕЛЬ | 2003 |
|
RU2251783C1 |
| ОДНОФАЗНЫЙ СИНХРОННЫЙ САМОЗАПУСКАЮЩИЙСЯ ДВИГАТЕЛЬ | 1992 |
|
RU2071629C1 |
| РЕПУЛЬСИОННЫЙ ВЕНТИЛЬНЫЙ РЕВЕРСИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2187190C2 |
| Однофазный вентильный электродвигатель | 1985 |
|
SU1339790A1 |
| Репульсионный вентильный реверсивный электродвигатель | 1988 |
|
SU1622915A1 |
| US 3821619 A, 28.06.1974 | |||
| DE 3942344 С1, 18.07.1971 | |||
| 0 |
|
SU358805A1 | |

