Область техники, к которой относится изобретение
Область техники, к которой относится настоящее изобретение, охватывает навигационные системы для авиационного или наземного носителя, содержащие приемник для спутниковой навигации, например GPS-приемник.
Более конкретно, изобретение относится к навигационной системе и способу управления такой системой, позволяющему обеспечить целостность навигационного решения, предоставляемого такой системой.
Уровень техники
В области навигационных систем, в особенности навигационных систем с использованием псевдорасстояний, обеспечиваемых системой спутниковой навигации, одной из основных трудностей и регулярным источником погрешностей при определении местоположения служит управление и определение непрямых составных путей, соответствующих отражению сигнала, излучаемого спутником, до его поступления на приемник.
Помимо значительного ухудшения точности данных о местоположении, рассчитываемых GPS-приемником, такое явление фактически воздействует на целостность определения местоположения, рассчитываемого GPS-приемником в той мере, в какой эти данные не обрабатываются с помощью традиционно применяемых механизмов проверки целостности.
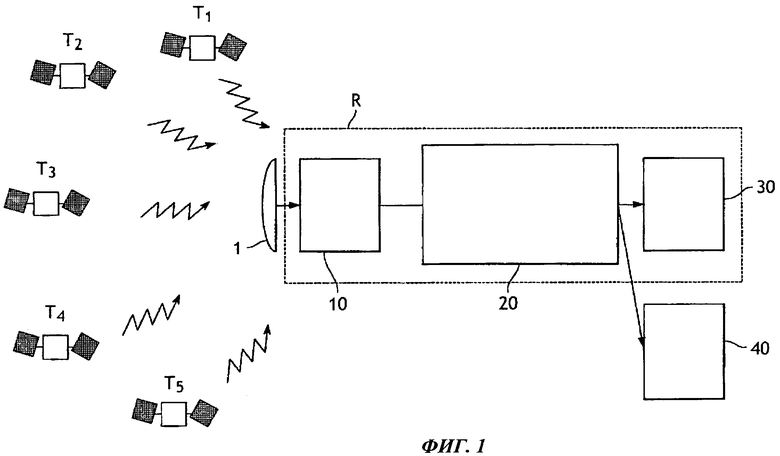
Блок-схема автономного контроля целостности навигационных определений (или RAIM, Receiver Autonomous Integrity Monitoring), традиционно применяемого в GPS-приемнике, показана на фиг.1.
Приемник R имеет антенну 1, выполненную с возможностью приема GPS-сигналов от ряда спутников T1-T5.
Приемник R включает средства 10 для расчета для каждого GPS-сигнала от спутника T1-T5, отслеживаемого приемником, набора первичных навигационных измерений (называемых также первичными GPS измерениями). Эти первичные навигационные измерения, как правило, включают псевдорасстояния, псевдоскорости, связанные с ними показатели эффективности, например UERE (User Equivalent Range Error, эквивалентная погрешность измерения дальности абонентом), обозначающий погрешность измерения расстояния между приемником и спутником, а также соответствующее время измерения UTC (Coordinated Universal Time, универсальное координированное время).
Наборы первичных навигационных данных передаются на модуль RAIM 20, который контролирует глобальную согласованность группировки спутников, используя данные всех первичных GPS измерений, фактически предоставляемые средствами расчета 10, и исключает первичные измерения, которые представляются несогласованными.
Первичные измерения, остающиеся к концу процесса RAIM, отмечаются как «достоверные». Эти достоверные измерения используются затем для получения навигационного решения с помощью чисто навигационного фильтра GPS 30, или с помощью инерциального/гибридного навигационного фильтра GPS 40. Навигационное решение, как правило, содержит навигационные параметры PVT (Position/Velocity/Time, Позиция/Скорость/Время).
Поэтому ясно, что в зависимости от автономного контроля целостности RAIM учитываются первичные измерения, рассчитанные для всех спутников, которые отслеживаются приемником. Далее, несогласованность группировки будет определена по всем этим первичным измерениям, чтобы исключить в случае необходимости первичные измерения в начальной точке возникновения несогласованности.
Это приводит к тому, что первичные измерения, искаженные ошибками, но не создающие какую-либо несогласованность группировки, не могут быть определены и(или) исключены при помощи контроля RAIM. Поэтому такие измерения отмечаются как достоверные и используются для получения навигационного решения.
Так, например, обстоит дело с первичными измерениями, соответствующими непрямому составному пути, которые, однако, как показано выше, воздействуют на целостность навигационного решения.
В связи с этим существует потребность в улучшении контроля целостности, а именно в ограничении воздействия непрямых составных путей, избегая при получении навигационного решения использования первичных измерений, искаженных ошибками, например соответствующих непрямому составному пути (и в особенности соответствующих чисто непрямому составному пути, для которых навигационная система принимает только отраженный, но не принимает прямой сигнал).
Раскрытие изобретения
Задачей настоящего изобретения является удовлетворение этой потребности и предложение для этой цели согласно первому аспекту способа управления навигационной системой носителя, принимающей сигналы от ряда передатчиков и выполненной с возможностью измерения псевдорасстояния до каждого передатчика, в котором проверяют угол места каждого из передатчиков относительно горизонтали носителя и получают навигационное решение на основе псевдорасстояний, для которых угол места соответствующего передатчика выше минимального угла места, отличающегося тем, что выполняют выделение составных путей из псевдорасстояний, измеренных для передатчиков, имеющих угол места ниже минимального угла места, и сохраняют разрешенные псевдорасстояния после указанного выделения для получения навигационного решения.
К числу некоторых предпочтительных, но неограничивающих аспектов настоящего изобретения относятся следующие:
- выделение составных путей заключается в проверке согласованности каждого из псевдорасстояний, измеренных для передатчиков, имеющих угол места ниже минимального угла места, при навигационном решении, полученном исключительно на основе псевдорасстояний, измеренных для передатчиков, имеющих угол места выше минимального угла места;
- проверка согласованности включает для псевдорасстояния, измеренного для передатчика, имеющего угол места ниже минимального угла места, измерение отклонения между указанным псевдорасстоянием и псевдорасстоянием, когда указанный передатчик оценивается с помощью псевдорасстояний, измеренных для передатчиков, имеющих угол места выше минимального угла места;
- выделение составных путей включает для передатчика, который не имеет непосредственного разрешения, сравнение псевдорасстояния, измеренного для указанного передатчика, с псевдорасстоянием до указанного передатчика, рассчитанным на основе информации о местоположении и среднеквадратическом отклонении определения местоположения, связанной с носителем, при этом указанную информацию получают с помощью псевдорасстояний, для которых угол места соответствующего передатчика выше минимального угла места;
- модифицирование минимального угла места в зависимости от навигационной фазы носителя.
Согласно второму аспекту настоящее изобретение относится к навигационной системе, предназначенной для встраивания в носитель, содержащей средства для приема сигналов от ряда передатчиков и выполненной с возможностью измерения псевдорасстояния до каждого передатчика, а также содержащей средства для проверки угла места каждого из передатчиков относительно горизонтали носителя, и средства для получения навигационного решения на основе псевдорасстояний, для которых угол места соответствующего передатчика выше минимального угла места, отличающейся тем, что она включает средства для выделения составных путей из псевдорасстояний, измеренных для передатчиков, имеющих угол места ниже минимального угла места, причем средства для получения навигационного решения используют разрешенные псевдорасстояния после указанного выделения.
Прочие аспекты, цели и преимущества настоящего изобретения будут понятнее из нижеследующего подробного описания предпочтительных вариантов его осуществления, данных в качестве неограничивающего примера со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
На фиг.1, уже прокомментированной выше, представлена схема навигационной системы, в которой применяется автономный контроль целостности RAIM.
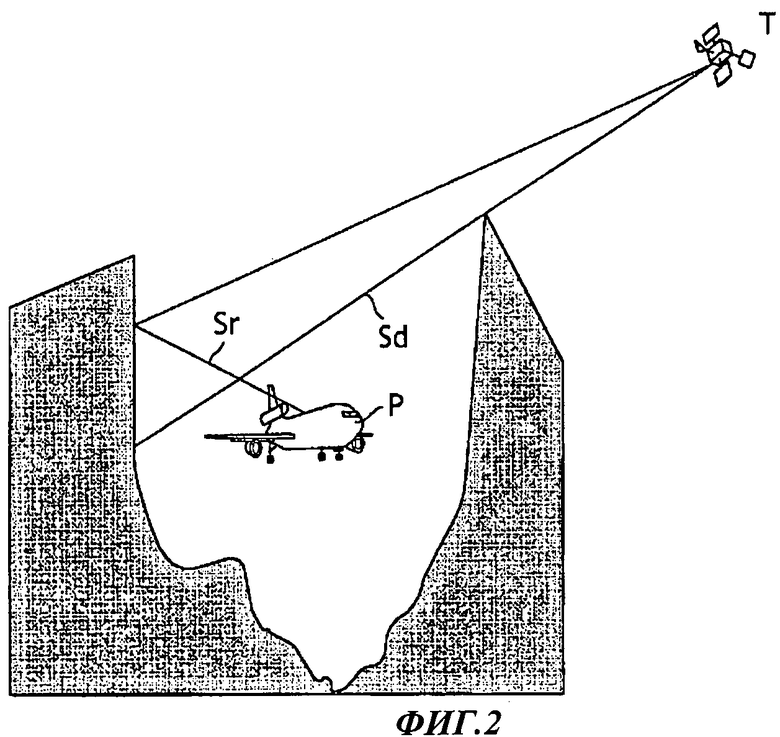
На фиг.2 представлена схема, иллюстрирующая чисто непрямой составной путь, при котором навигационная система носителя принимает только отраженный, но не принимает прямой сигнал.
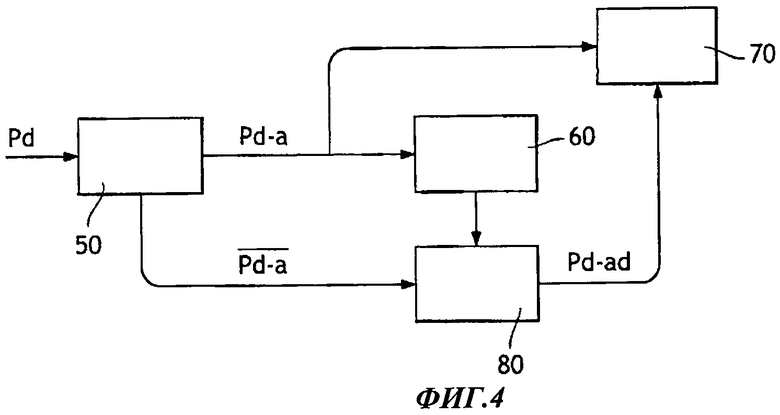
На фиг.3 представлена схема, иллюстрирующая принцип проверки угла места согласно настоящему изобретению.
На фиг.4 представлена схема, иллюстрирующая навигационную систему согласно возможному варианту осуществления второго аспекта настоящего изобретения.
Осуществление изобретения
Согласно первому аспекту настоящее изобретение относится к способу управления навигационной системой (авиационного или наземного) носителя, содержащей приемник, выполненный с возможностью приема сигналов от ряда передатчиков, а также с возможностью измерения для каждого передатчика псевдорасстояния между приемником и указанным передатчиком и получения навигационного решения на основе ряда измеренных псевдорасстояний.
В дальнейшем обсуждении будет приведен пример системы спутниковой навигации GPS. Однако будет понятно, что изобретение не ограничивается этой конкретной системой, но предназначено для применения с любой системой спутниковой навигации типа GNSS (Global Navigation Satellite System, ГЛОНАСС, Глобальная навигационная спутниковая система), в частности с будущей системой «Галилео».
Возможный случай возникновения чисто непрямого составного пути показан на фиг.2, в соответствии с которым только отраженный сигнал Sr, но не прямой сигнал Sd принимается навигационной системой носителя Р (здесь это авиационный носитель) от передатчика Т. В случае, представленном на фиг.2, составной путь возникает вследствие того, что передатчик Т не находится в достаточно высоком положении относительно носителя Р, чтобы прямой сигнал Sd мог достичь носителя.
На фиг.3 иллюстрируется принцип проверки угла места применительно к объему настоящего изобретения. Согласно настоящему изобретению угол места каждого из передатчиков T1-Т3 проверяется относительно горизонтали (Н) носителя Р, чтобы отличить передатчики Т1-Т2, имеющие угол места, превышающий минимальный угол места Em, от передатчиков Т3, имеющих более низкий угол места, чем минимальный угол места Em. Передатчики Т3 расположены таким образом, что могут вызвать появление составных путей в той мере, в какой они не находятся в достаточно высокой позиции относительно носителя Р.
Далее, в целях получения навигационного решения, сохраняются все псевдорасстояния, для которых угол места соответствующего передатчика превышает минимальный угол места Em.
Здесь установлено, что под «углом места» подразумевается угол, образованный линией носитель-спутник, и горизонтальной плоскостью, проходящей через носитель. Таким образом, угол места изменяется в диапазоне от 0° до 90° в зависимости от высоты спутника в небе (иными словами, угол места изменяется от горизонта до вертикального положения над носителем).
Угол места спутника относительно носителя можно, в частности, рассчитать с помощью информации об относительном местоположении носителя и спутника. Затем этот угол места сравнивается с углом места, соответствующим указанному минимальному углу места Em, и задается в качестве примера в зависимости от носителя и(или) фазы полета.
Здесь также установлено, что под «горизонталью носителя» подразумевается горизонтальная плоскость, проходящая через носитель (это плоскость, перпендикулярная вертикали, проходящей через носитель).
Со ссылкой на фиг.4, навигационная система согласно второму аспекту настоящего изобретения включает средства 50 для проверки угла места каждого из передатчиков T1-Т3 относительно горизонтали Н носителя Р. Тем самым эти средства 50 позволяют выделить из всех измеренных псевдорасстояний Pd псевдорасстояния Pd-a (называемые также непосредственно разрешенными псевдорасстояниями), измеренные для передатчиков, имеющих угол места выше минимального угла места (передатчики T1 и T2 на фиг.3) и псевдорасстояния  , не являющиеся непосредственно разрешенными и измеренные для передатчиков, имеющих угол места ниже минимального угла места (передатчик Т3 на фиг.3).
, не являющиеся непосредственно разрешенными и измеренные для передатчиков, имеющих угол места ниже минимального угла места (передатчик Т3 на фиг.3).
Кроме того, навигационная система включает фильтр 60, называемый «фильтром минимального угла места», в котором для получения навигационного решения используются только непосредственно разрешенные псевдорасстояния Pd-a, для которых соответствующий передатчик Т1-Т2 расположен выше, чем минимальный угол места Em, относительно горизонтали Н носителя Р, и для которых поэтому установлено отсутствие воздействия непрямых составных путей.
Учитываемый минимальный угол места Em может, конечно, различаться для разных носителей. Например, значение минимального угла места Em, используемое для наземного носителя, будет отличаться от значения, используемого для авиационного носителя.
Просто к качестве наглядного примера минимальный угол места для самолета можно принимать равным 30°, если считать, что этот самолет никогда не будет совершать полет в каньоне с обращенным к небу углом раствора меньше 120°.
Конечно, минимальный угол места может изменяться в зависимости от применения и даже различаться в зависимости от использования носителя. Таким образом, минимальный угол места может модифицироваться в зависимости от навигационной фазы носителя. Рассматривая в качестве примера самолет, можно, в частности, использовать различное значение минимального угла места в зависимости от того, является ли навигационная фаза фазой полета на бреющей высоте или фазой полета над океаном (кроме того, при этом данную функцию можно даже отключить, например, считая минимальный угол места равным нулю).
Фильтр минимального угла места 60, предусмотренный для получения навигационного решения на основе измеренных псевдорасстояний Pd-a, непосредственно разрешенных посредством проверки угла места (т.е. соответствующих передатчикам, имеющим угол места, превышающий минимальный угол места), может представлять собой чисто навигационный фильтр GPS (например, фильтр для расчета местоположения по способу Банкрофта) или, кроме того, инерциальный/гибридный навигационный фильтр GPS.
Согласно настоящему изобретению выделение составных путей среди измеренных, непосредственно не разрешенных псевдорасстояний  для передатчиков Т3, имеющих угол места ниже минимального угла места (Em), которые не используются в фильтре минимального угла места 60, выполняется для получения навигационного решения, при этом разрешенные псевдорасстояния Pd-ad сохраняются после указанного выделения для получения навигационного решения.
для передатчиков Т3, имеющих угол места ниже минимального угла места (Em), которые не используются в фильтре минимального угла места 60, выполняется для получения навигационного решения, при этом разрешенные псевдорасстояния Pd-ad сохраняются после указанного выделения для получения навигационного решения.
С этой целью навигационная система включает средства 80 для выделения составных путей, которые используют фильтр минимального угла места 60, чтобы выделить из измеренных псевдорасстояний  для передатчиков (Т3), имеющих угол места ниже минимального угла места, которые не используются в фильтре минимального угла места 60, те псевдорасстояния Pd-ad, которые могут, вместе с тем, быть использованы для получения навигационного решения.
для передатчиков (Т3), имеющих угол места ниже минимального угла места, которые не используются в фильтре минимального угла места 60, те псевдорасстояния Pd-ad, которые могут, вместе с тем, быть использованы для получения навигационного решения.
Навигационная система может, кроме того, включать так называемый навигационный фильтр 70, выполненный с возможностью получения навигационной информации на основе всей информации об имеющихся псевдорасстояниях. Таким образом, в этом навигационном фильтре 70 используются, по меньшей мере, все непосредственно разрешенные псевдорасстояния Pd-a, которые используются в фильтре минимального угла места 60, а также псевдорасстояния Pd-ad, которые не используются в фильтре минимального угла места 60, но будут разрешены средствами 80 для выделения составных путей.
Здесь следует отметить, что применение инерциального/гибридного фильтра GPS для фильтра минимального угла места 60 обладает тем преимуществом, что позволяет выполнять функцию определения составных путей, даже если количество псевдорасстояний Pd-a, передаваемых спутниками с углом места выше минимального, невелико.
Такой гибридный фильтр фактически обеспечивает непрерывное получение навигационного решения, даже если количество спутников с углом места выше минимального становится меньше 4 (местоположение продолжает рассчитываться в отличие от чистого фильтра GPS, который не позволяет определять местоположение, если количество спутников становится меньше 4).
Согласно первому варианту только непосредственно разрешенные и используемые в фильтре минимального угла места 60 псевдорасстояния Pd-a разрешены в навигационном фильтре 70. Этот вариант обладает преимуществом простоты и систематического функционирования в любом случае (независимо от того, является ли навигационный фильтр 70 инерциальным/гибридным фильтром GPS или чистым фильтром GPS). Это может, однако, оказаться недостатком с точки зрения эффективности и работоспособности фильтра (в частности, в случае чисто навигационного фильтра GPS).
Согласно второму варианту выделение составных путей выполняется среди непосредственно не разрешенных псевдорасстояний  для передатчиков (Т3 в примере, показанном на фиг.3), имеющих угол места ниже минимального угла места, при этом разрешенные псевдорасстояния Pd-ad сохраняются после указанного выделения для получения навигационного решения. Таким образом, в навигационном фильтре 70 используются все непосредственно разрешенные псевдорасстояния Pd-a, а также непосредственно не разрешенные псевдорасстояния Pd-ad, которые не используются в фильтре минимального угла места 60, но разрешены средствами 80 для выделения составных путей.
для передатчиков (Т3 в примере, показанном на фиг.3), имеющих угол места ниже минимального угла места, при этом разрешенные псевдорасстояния Pd-ad сохраняются после указанного выделения для получения навигационного решения. Таким образом, в навигационном фильтре 70 используются все непосредственно разрешенные псевдорасстояния Pd-a, а также непосредственно не разрешенные псевдорасстояния Pd-ad, которые не используются в фильтре минимального угла места 60, но разрешены средствами 80 для выделения составных путей.
Средства выделения 80 могут использовать информацию о местоположении и среднеквадратическом отклонении определения местоположения, рассчитанную фильтром минимального угла места 60. Конкретнее, средства выделения 80 рассчитывают, на основе этого местоположения и среднеквадратического отклонения определения местоположения, которые связаны с носителем и рассчитаны фильтром минимального угла места 60, псевдорасстояния - и соответствующее среднеквадратическое отклонение - непосредственно не разрешенного спутника, и сравнивают его с данными фактического измерения (непосредственно не разрешенное псевдорасстояние  ). При допущении, что результат этого сравнения меньше, чем ±n сигма (среднеквадратическое отклонение) (n изменяется в зависимости от принятого уровня ошибки), спутник можно перепроверить (его псевдорасстояние типа Pd-ad может затем использоваться в навигационном фильтре 70). В противном случае данные спутника остаются недействительными.
). При допущении, что результат этого сравнения меньше, чем ±n сигма (среднеквадратическое отклонение) (n изменяется в зависимости от принятого уровня ошибки), спутник можно перепроверить (его псевдорасстояние типа Pd-ad может затем использоваться в навигационном фильтре 70). В противном случае данные спутника остаются недействительными.
Средства выделения 80 могут также проверять согласованность посредством проверки гипотезы (например, типа RAIM) для системы, состоящей из непосредственно разрешенных псевдорасстояний Pd-a и непосредственно не разрешенных псевдорасстояний  , проверяемых рекурсивно (N проверок, если необходимо проверить N непосредственно не разрешенных псевдорасстояний
, проверяемых рекурсивно (N проверок, если необходимо проверить N непосредственно не разрешенных псевдорасстояний  ).
).
Выделение составных путей может, таким образом, заключаться в проверке согласованности каждого из псевдорасстояний  , измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места, при навигационном решении, полученном с помощью фильтра минимального угла места 60 исключительно на основе непосредственно разрешенных псевдорасстояний Pd-a (измеренных для передатчиков (T1-T2), у которых угол места выше минимального). Здесь установлено, что вполне возможно выполнить фактическую проверку согласованности непосредственно не разрешенного спутника путем сравнения первичных навигационных измерений, отличных от псевдорасстояний, например таких, как псевдоскорости, а также псевдо «дельта-диапазоны».
, измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места, при навигационном решении, полученном с помощью фильтра минимального угла места 60 исключительно на основе непосредственно разрешенных псевдорасстояний Pd-a (измеренных для передатчиков (T1-T2), у которых угол места выше минимального). Здесь установлено, что вполне возможно выполнить фактическую проверку согласованности непосредственно не разрешенного спутника путем сравнения первичных навигационных измерений, отличных от псевдорасстояний, например таких, как псевдоскорости, а также псевдо «дельта-диапазоны».
Проверка согласованности может включать для непосредственно не разрешенного псевдорасстояния  , измеренного для передатчика Т3, измерение отклонения между указанным псевдорасстоянием
, измеренного для передатчика Т3, измерение отклонения между указанным псевдорасстоянием  и псевдорасстоянием между приемником и передатчиком Т3, оцениваемым при помощи непосредственно разрешенных псевдорасстояний Pd-a, которые измеряются для передатчиков T1 и Т2, имеющих угол места выше минимального угла места.
и псевдорасстоянием между приемником и передатчиком Т3, оцениваемым при помощи непосредственно разрешенных псевдорасстояний Pd-a, которые измеряются для передатчиков T1 и Т2, имеющих угол места выше минимального угла места.
Для этой цели, в частности, можно определять местоположение приемника, используя все псевдорасстояния Pd-a, измеренные для передатчиков T1 и T2, имеющих угол места выше минимального угла места и непосредственно разрешенных, а также оценивать указанное псевдорасстояние между приемником и передатчиком Т3 на основе указанного определенного положения приемника и данных астрономического календаря, относящихся к указанному передатчику.
Должно быть понятно, что настоящее изобретение предлагает способ и систему, обеспечивающие ограничение воздействия непрямых путей путем определения их наличия перед использованием в навигационном алгоритме для расчета местоположения. Следствием этого является снижение воздействия непрямых составных путей на местоположение, рассчитанное приемником ГЛОНАСС, и улучшение целостности данных этого рассчитанного местоположения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ЦЕЛОСТНОСТИ ИЗМЕРЕНИЙ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2008 |
|
RU2464531C2 |
| УНИВЕРСАЛЬНАЯ ВЫСОКОЭФФЕКТИВНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2428714C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИБРИДНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ (ВАРИАНТЫ) | 2008 |
|
RU2399065C2 |
| СИСТЕМА И/ИЛИ СПОСОБ ДЛЯ ПОЛУЧЕНИЯ ПРИВЯЗКИ ПО ВРЕМЕНИ ДЛЯ ПРИНЯТЫХ СИГНАЛОВ SPS | 2009 |
|
RU2448348C1 |
| НАВИГАЦИОННЫЙ ПРИЕМНИК | 2008 |
|
RU2481596C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДСКАЗАНИЯ ЭФФЕКТИВНОСТИ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2008 |
|
RU2467352C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2278394C2 |
| СПОСОБ И СИСТЕМА ДЛЯ НАСТРОЙКИ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2667667C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |
| СИСТЕМА И/ИЛИ СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2007 |
|
RU2431866C2 |
Изобретение относится к области радиотехники, а именно к спутниковой навигации, и может быть использовано в навигационных системах для авиационного или наземного носителя. Технический результат заключается в обеспечении улучшения контроля целостности навигационного решения. Для этого в способе управления навигационной системой носителя (Р), принимающей сигналы от ряда передатчиков (T1-Т3) и выполненной с возможностью измерения псевдорасстояния до каждого передатчика, проверяют угол места каждого из передатчиков (T1-Т3) относительно горизонтали (Н) носителя (Р), а навигационное решение получают на основе псевдорасстояний (Pd-a), для которых угол места соответствующего передатчика выше минимального угла места (Em), при этом способ также включает выделение составных путей из псевдорасстояний (формула I), измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места (Em) и сохранение разрешенных псевдорасстояний (Pd-ad) после указанного выделения для получения навигационного решения. Изобретение также относится к навигационной системе, выполненной с возможностью реализации способа согласно первому аспекту настоящего изобретения. 2 н. и 4 з.п. ф-лы, 4 ил.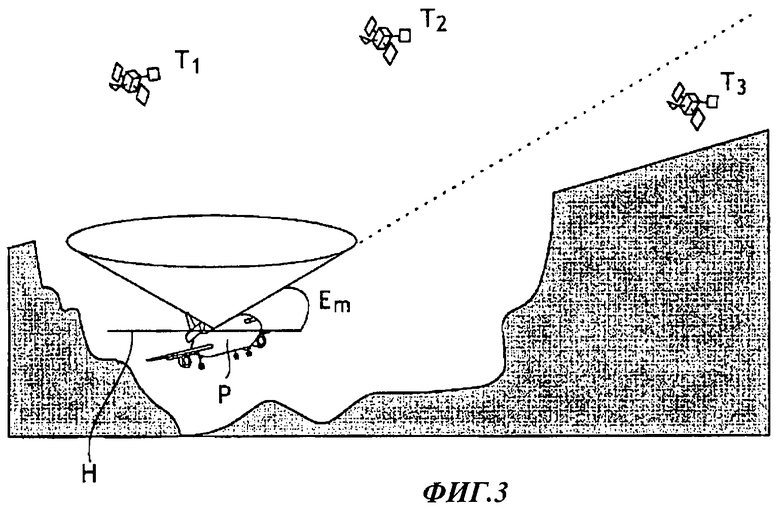
1. Способ управления навигационной системой носителя (Р), принимающей сигналы от ряда передатчиков (T1-Т3) и выполненной с возможностью измерения псевдорасстояния до каждого передатчика, в котором проверяют угол места каждого из передатчиков (T1-Т3) относительно горизонтали (Н) носителя (Р) и получают навигационное решение на основе псевдорасстояний (Pd-a), для которых угол места соответствующего передатчика выше минимального угла места (Em), отличающийся тем, что выполняют выделение составных путей из псевдорасстояний  , измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места (Em), и сохраняют разрешенные псевдорасстояния (Pd-ad) после указанного выделения для получения навигационного решения.
, измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места (Em), и сохраняют разрешенные псевдорасстояния (Pd-ad) после указанного выделения для получения навигационного решения.
2. Способ по п.1, отличающийся тем, что выделение составных путей заключается в проверке согласованности каждого из псевдорасстояний  , измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места (Em), при навигационном решении, полученном исключительно на основе псевдорасстояний (Pd-a), измеренных для передатчиков (T1-Т2), имеющих угол места выше минимального угла места (Em).
, измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места (Em), при навигационном решении, полученном исключительно на основе псевдорасстояний (Pd-a), измеренных для передатчиков (T1-Т2), имеющих угол места выше минимального угла места (Em).
3. Способ по п.2, отличающийся тем, что проверка согласованности включает, для псевдорасстояния , измеренного для передатчика (Т3), имеющего угол места ниже минимального угла места, измерение отклонения между указанным псевдорасстоянием и псевдорасстоянием, когда указанный передатчик (Т3) оценивается с помощью псевдорасстояний (Pd-a), измеренных для передатчиков (T1-Т2), имеющих угол места выше минимального угла места.
4. Способ по п.1, отличающийся тем, что выделение составных путей включает, для передатчика, который не имеет непосредственного разрешения, сравнение псевдорасстояния , измеренного для указанного передатчика, с псевдорасстоянием до указанного передатчика, рассчитанным на основе информации о местоположении и среднеквадратическом отклонении определения местоположения, связанной с носителем, при этом указанную информацию получают с помощью псевдорасстояний (Pd-a), для которых угол места соответствующего передатчика выше минимального угла места (Em).
5. Способ по любому из пп.1-4, отличающийся тем, что модифицируют минимальный угол места в зависимости от навигационной фазы носителя.
6. Навигационная система, предназначенная для встраивания в носитель (Р), содержащая средства для приема сигналов от ряда передатчиков (T1-Т3) и выполненная с возможностью измерения псевдорасстояния до каждого передатчика, а также содержащая средства (10) для проверки угла места каждого из передатчиков (T1-Т3) относительно горизонтали (Н) носителя (Р) и средства (70) для получения навигационного решения на основе псевдорасстояний (Pd-а), для которых угол места соответствующего передатчика (T1-T2) выше минимального угла места (Em), отличающаяся тем, что включает средства (80) для выделения составных путей из псевдорасстояний , измеренных для передатчиков (Т3), имеющих угол места ниже минимального угла места (Em), причем средства (70) для получения навигационного решения используют разрешенные псевдорасстояния (Pd-ad) после указанного выделения.
| Способ измерения параметров прозрачных труб и устройство для его осуществления | 1991 |
|
SU1775598A1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2267796C2 |
| US 6377891 B1, 23.04.2002 | |||
| US 5631838 A, 20.05.1997 | |||
| US 2002101912 A1, 01.08.2002. | |||

