Предлагаемое изобретение относится к автоматике и может быть использовано для программно-перестраиваемых управляющих устройств в пневматических и гидравлических системах управления дискретного действия, в системах управления мобильными объектами различного назначения. Устройство может найти применение в системах управления химико-технологическими процессами, в теплоэнергетике и горной промышленности, в системах пневмо- и гидротранспорта, а также в качестве низшего уровня систем управления пневматических, гидравлических и различных гибридных схем, работающих в экстремальных условиях эксплуатации: пожаро- и взрывоопасные среды, повышенный фон радиоактивности, вибрации и др. Предлагаемое устройство матричной структуры может применяться для программного управления несколькими пневматическими или гидравлическими комплексами одновременно, при этом универсальность конструкции не ограничивает матричную размерность устройства.
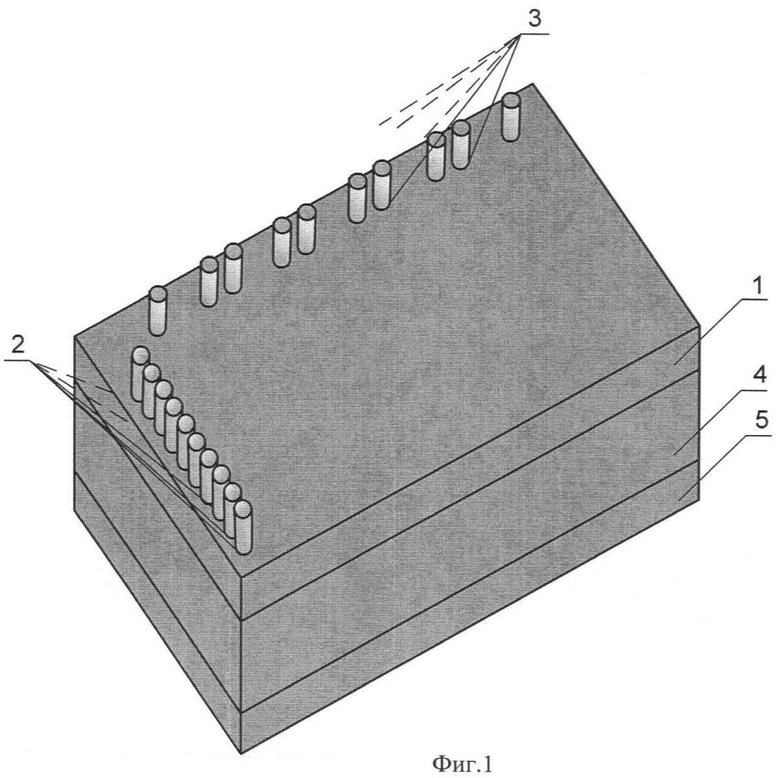
Известна программная матрица для пневматических систем управления дискретного действия (патент на полезную модель №64792 от 20.11.2006 г. - прототип), корпус которой выполнен в виде пакета из трех плат (см. фиг.1). В верхней плате 1 расположены n сквозных входных отверстий 2 и m сквозных выходных отверстий 3, m выходных каналов и m/2 промежуточных каналов, сгруппированных так, что на каждую пару выходных каналов приходится один промежуточный канал с Т-образным разветвлением, у сквозных выходных отверстий 2 установлены электропневмоклапаны для управляемого выпуска воздуха из выходных коммуникаций в атмосферу через систему дренажных каналов. Средняя плата 4 имеет m сквозных соединительных отверстий, (3/2)×m×n сквозных гнезд для установки пробок-заглушек или основных активных элементов (обратных клапанов), n сквозных входных отверстий, продолжающих сквозные входные отверстия верхней плиты, m сквозных гнезд для установки в них вспомогательных активных элементов (обратных клапанов). В нижней плате 5 выполнено n входных каналов и m каналов-перемычек. Программная перестройка таких матриц возможна двумя способами:
1) замена средней платы на другую (такой же размерности) с заранее установленными обратными клапанами и пробками-заглушками в соответствующих сквозных гнездах;
2) перестановка обратных клапанов и пробок-заглушек в сквозных гнездах непосредственно в средней плате без ее замены.
В обоих вариантах перестройки матриц необходима их полная или частичная разборка. Использование в конструкции электропневматических клапанов, устанавливающихся в дренажных каналах, обуславливает наличие электрической составляющей устройства.
Конструктивными недостатками программной матрицы для пневматических систем управления дискретного действия являются:
1) необходимость разборки матрицы при ее программной перестройке, требующей временных затрат;
2) наличие электрической составляющей в системе управления дренажными системами (в случаях, когда пневмоприемники, управляемые программной матрицей, не имеют собственных дренажных систем).
Таким образом, целью изобретения является:
- упрощение процесса перестройки программной матрицы;
- увеличение количества заложенных в матрицу программ без увеличения ее размерности;
- реализация полностью пневматического (или гидравлического) устройства, способного работать в максимально жестких условиях эксплуатации.
Поставленная цель достигается изменением геометрической формы плат, составляющих программную матрицу, и использованием клапанов с пневматическим или гидравлическим управлением, устанавливаемых в дренажных каналах.
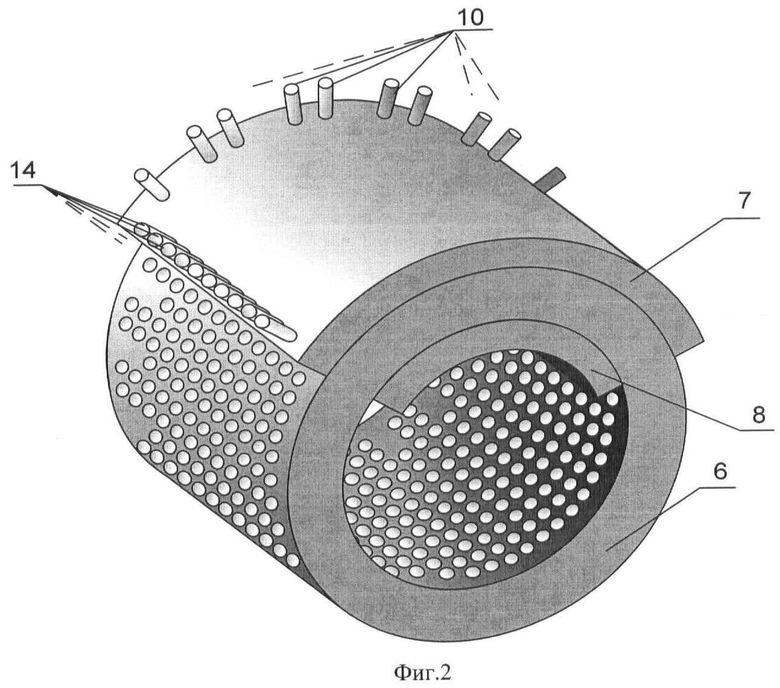
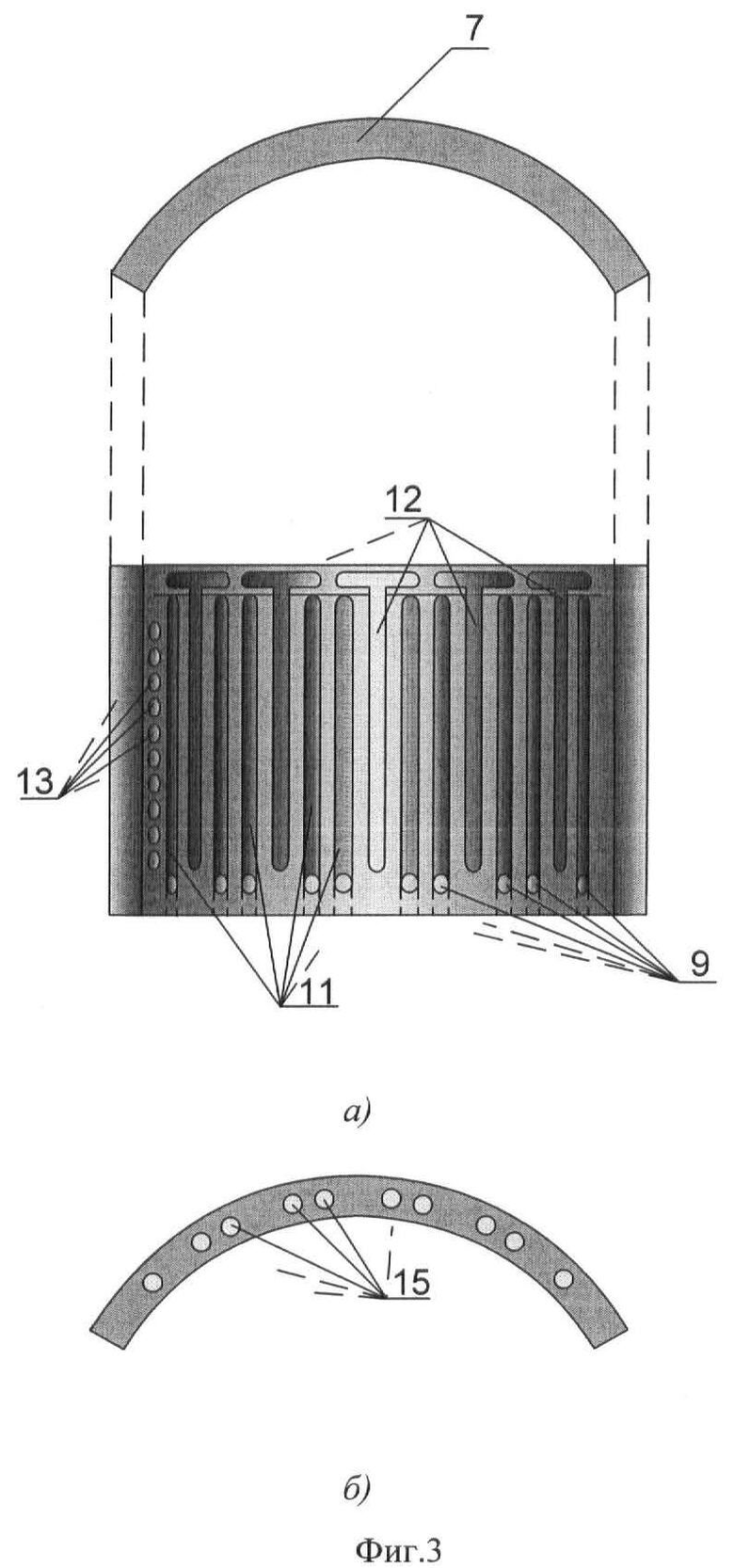
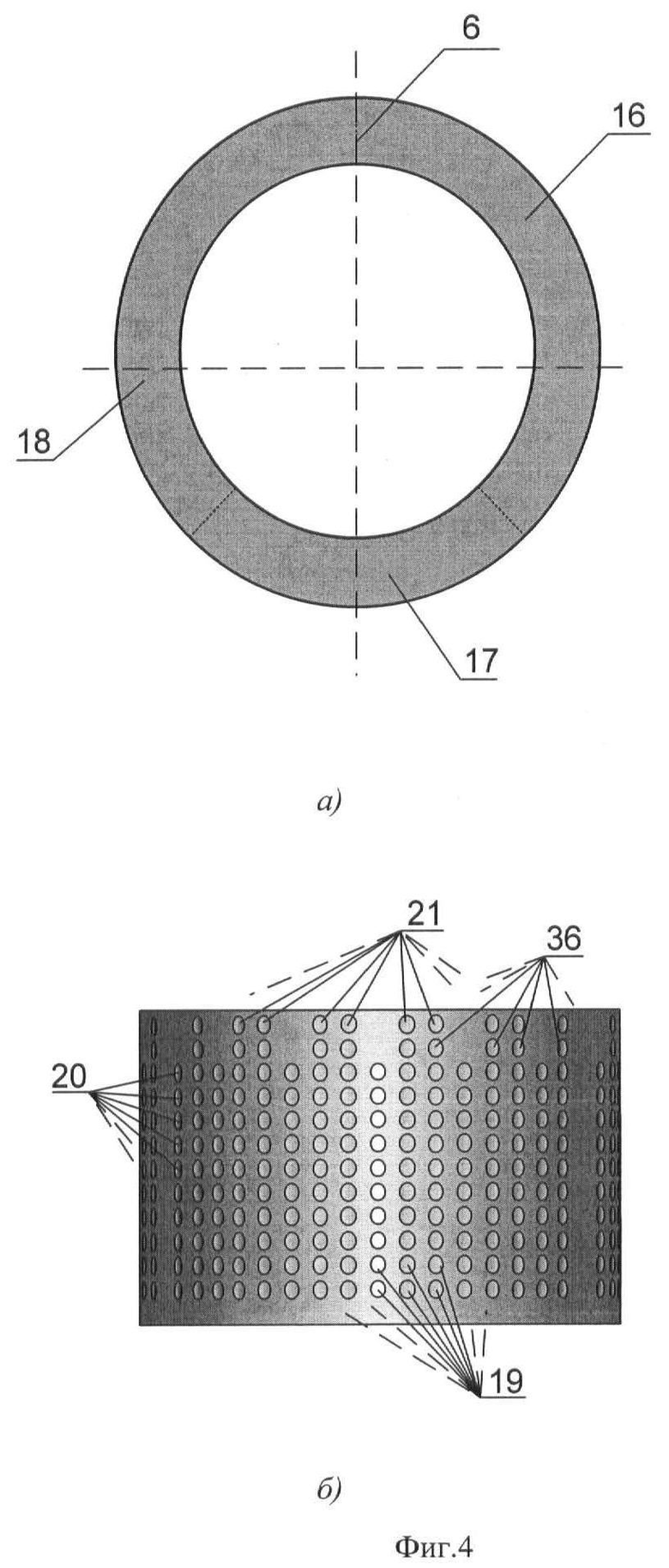
Сущность изобретения поясняется чертежами, где на фиг.2 изображен общий вид предлагаемого устройства с размерностью m×n (m=10, n=10) в аксонометрии; на фиг.3 - конструкция верхней платы (фиг.3а - вид платы сбоку и вид платы со стороны плоскости разъема со средней платой; фиг.3б - вид платы сбоку со стороны выходных пневматических (гидравлических) линий); на фиг.4 - конструкция средней платы (фиг.4а - вид платы сбоку; фиг.4б - вид платы сверху); на фиг.5 - конструкция нижней платы (фиг.5а - вид платы сбоку; фиг.5б - вид платы со стороны плоскости разъема со средней платой); на фиг.6 - общий вид устройства сверху; на фиг.7 - разрез фиг.6 по А-А; фиг.8 иллюстрирует принцип геометрического кодирования, используемого в конструкции предлагаемой матрицы; на фиг.9 - в аксонометрии отображен принцип прохождения рабочей среды от одного из входов в выходные каналы предлагаемого программно-перестраиваемого устройства; на фиг.10 изображен общий вид предлагаемого устройства в аксонометрии с заложенными программами распределения рабочей среды и условным разделением средней платы на программные части.
Предлагаемое устройство состоит из трех основных частей: верхней платы (фиг.3), средней платы (фиг.4) и нижней платы (фиг.5) согласно определению этих плат в прототипе.
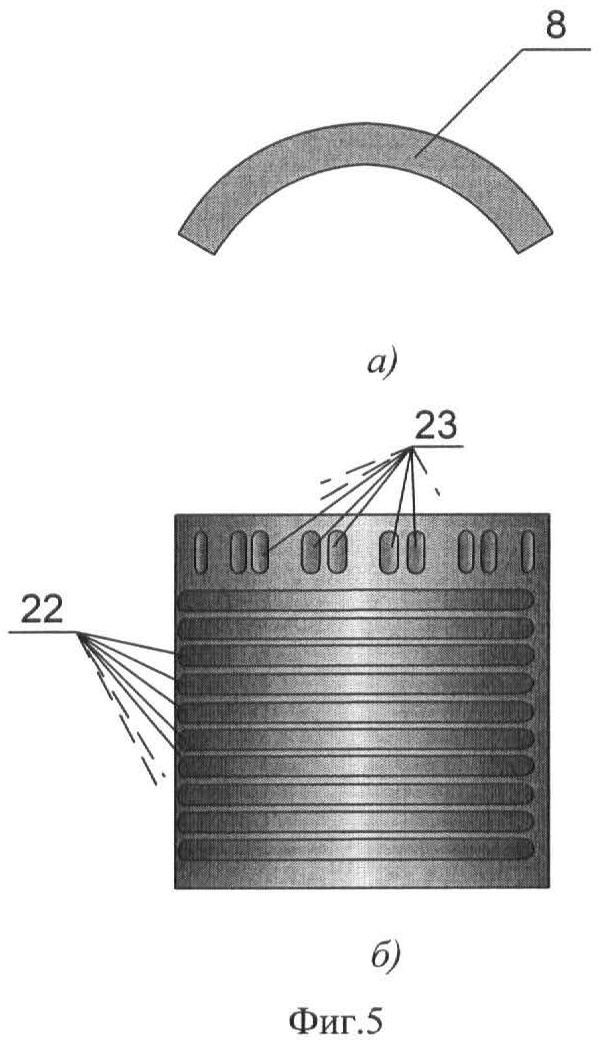
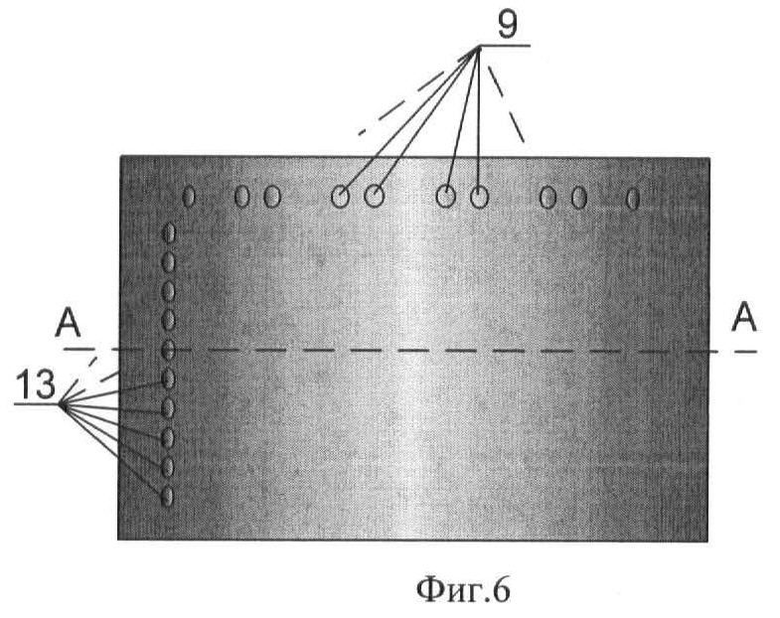
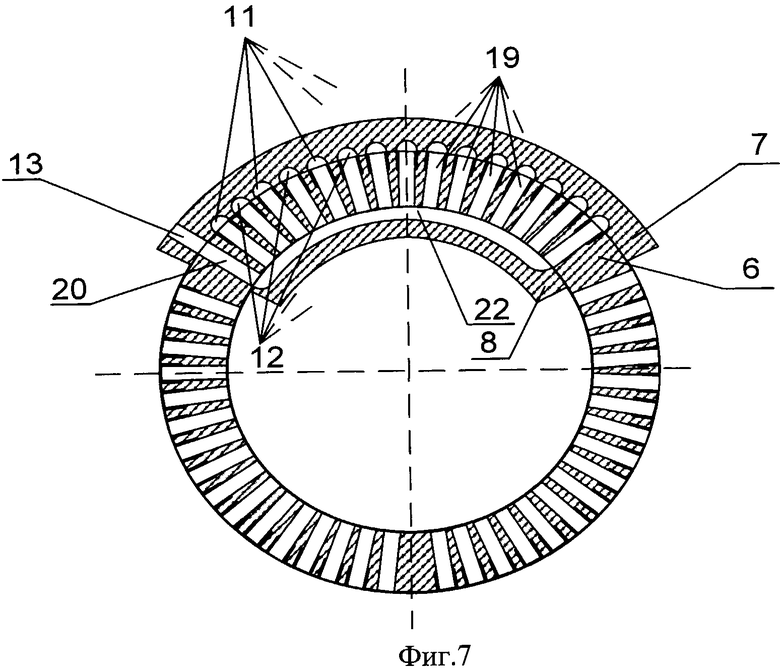
Платы имеют следующую геометрическую форму (см. фиг.2): средняя плата 6, цилиндрической формы заключена между верхней 7 и нижней 8 платами, причем кривизна верхней и нижней плат такова, что они плотно прилегают к внешней и внутренней поверхностям цилиндра средней платы. Общий вид устройства сверху представлен на фиг.6.
В верхней плате 7 (см. фиг.3, 6, 7) расположены: сквозные выходные отверстия 9 для подключения к ним закрепления m выходных пневматических (гидравлических) линий 10 (см. фиг.2), m выходных каналов 11 и m/2 промежуточных каналов 12 (см. фиг.3, 7), сгруппированных так, что на каждую пару выходных каналов 11 приходится один промежуточный канал 12 с Т-образным разветвлением. В этой же плате 7 расположены n сквозных входных отверстий 13 для закрепления входных пневматических (гидравлических) линий 14 (см. фиг.2). В дренажные каналы 15, представляющие собой сквозные гнезда, выходящие в сквозные выходные отверстия 9, верхней платы 7 герметично устанавливаются пневмоклапаны (гидроклапаны) (не показаны) с пневматическим (гидравлическим) управлением для управляемого сброса давления рабочей среды в выходных коммуникациях предлагаемого устройства. Эти клапаны могут также герметично подключаться непосредственно к сквозным гнездам 15 снаружи предлагаемого устройства.
Среднюю плату цилиндрической формы 6 (см. фиг.4) условно можно разбить на одинаковые сектора 16, 17 и 18, каждый из которых выполняет функцию одной средней платы в прототипе. Для одного сектора средняя плата 6 имеет (см. фиг.4, 7): (3/2)×m×n сквозных гнезд 19 для установки пробок-заглушек (не показаны) или основных обратных клапанов, n сквозных входных отверстий 20, продолжающих сквозные входные отверстия 13 верхней платы 7, m сквозных гнезд 21 для установки в них вспомогательных обратных клапанов (не показаны), m сквозных соединительных отверстий 36. Тип устанавливаемых обратных клапанов зависит от вида рабочей среды (газообразная или жидкая). В зависимости от формы применяемых обратных клапанов форма сквозных гнезд 19 и 21 определяется на стадии изготовления платы. Например, форма сквозных гнезд 19 и 21, представленных на фиг.4, 7, удобна для размещения в них ниппельных обратных клапанов.
В нижней плате 8 выполнено (см. фиг.5, 7): n входных каналов 22, в каждый из которых выходит вертикальный канал, образованный сквозным входным отверстием 13 верхней платы 7 и сквозным входным отверстием 20 средней платы; и m каналов-перемычек 23.
Средняя плата, имеющая форму цилиндра, подвижна вокруг оси цилиндра относительно верхней и нижней плат, и это обеспечивает возможность быстрого перестроения устройства без его разборки.
Герметичность соединений в конструкции обеспечивается тщательной подгонкой сопрягаемых поверхностей плат и стяжкой плат с регулируемым усилием нажатия: например, подпружиненные стяжные болты (на фиг.2, 6, 7 не показаны). Это необходимо для возможности поворота средней платы 6 относительно верхней 7 и нижней 8 плат. Герметичность соединений также обеспечивается установкой уплотнительных шайб под обратными клапанами или пробками-заглушками (на фиг.2, 4, 7 вышеуказанные шайбы не показаны).
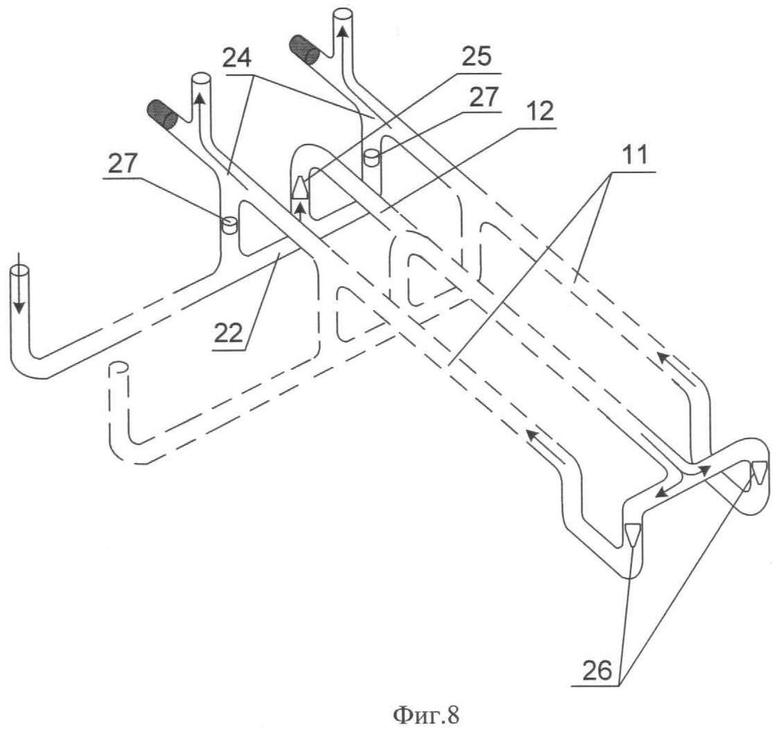
Используемый в предлагаемом устройстве принцип так называемого геометрического кодирования достаточно подробно изложен в описании прототипа (патент на полезную модель №64792 от 20.11.2006 г.) и заключается в том, что проводимость для двух соседних узлов 24 (см. фиг.8) может быть обеспечена одним основным обратным клапаном 25, устанавливаемым на пересечении входного 22 и промежуточного 12 каналов, связанного с двумя соседними выходными каналами 11 вспомогательными обратными клапанами 26, через которые давление рабочей среды одновременно подается в оба соседних выходных канала 11. А пробки-заглушки 27 герметично разделяют выходные каналы 11 верхней платы 7 от входного канала 22 нижней платы 8. Применение принципа геометрического кодирования в конструкции предлагаемого устройства, при неограниченном увеличении его размерности, позволяет достичь почти 50% экономии обратных клапанов по сравнению с подобными матричными конструкциями без использования этого принципа.
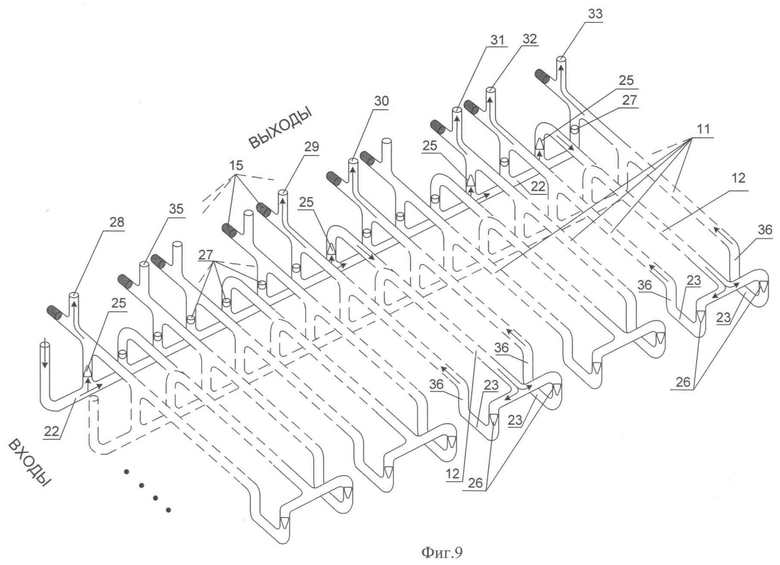
Рассмотрим функционирование предлагаемого программно-перестраиваемого устройства с размерностью 10×10, где запрограммирована подача давления рабочей среды на 28, 29, 30, 31, 32 и 33 выходы при его подаче на i-й вход матрицы. В этом случае поток рабочей среды (см. фиг.9, 7) через i-e сквозное отверстие 13 верхней платы 7 и сквозное отверстие 20 средней платы 6 попадает в i-й входной канал 22, выполненный в нижней плате 8, откуда через установленные в сквозных гнездах 19 средней платы 6 основные обратные клапаны 25 проходит непосредственно к 28 и 31 выходам через выходные каналы 11 в верхней плате 7, а также проходит в промежуточные каналы 12, расположенные в верхней плате 7 и находящиеся между 29 и 30, 32 и 33 выходами, далее заходит в T-образное разветвление указанных промежуточных каналов и одновременно поступает к вспомогательным обратным клапанам 26, расположенным в сквозных гнездах 21 средней платы 6 (см. фиг.4), через которую далее параллельно проходит по каналам-перемычкам 23, находящимся в нижней плате 8, и через сквозные соединительные отверстия 36 средней платы 6 (см. фиг.4) и выходные каналы 11 верхней платы 7 подается на выходы 29, 30 и 32, 33. Через соответствующие выходные отверстия 9 (см. фиг.3, 6) верхней платы 7 поток рабочей среды поступает на выходы 28, 29, 30, 31, 32 и 33 (в выходные пневмопроводы (гидропроводы) (не показаны)) и далее к приемникам соответствующего типа с теми же номерами (не показаны). Переток рабочей среды из «работающего» выходного канала в «неработающий» (например, из канала с выходом 28 в канал с выходом 35) исключается запирающими свойствами вспомогательных обратных клапанов 26.
При снятии давления с рассматриваемого i-го входа сброс давления рабочей среды, заключенной в отверстиях 19, 36, 21 и 9 (см. фиг.4, 5, 6, 7), промежуточных каналах 12, каналах перемычках 23, выходных каналах 11 выходов 28, 29, 30, 31, 32 и 33, и подключенных к ним пневмопроводов (гидропроводов) и соответствующих исполнительных механизмов производится через расположенные в верхней плате 7 дренажные каналы 15 (см. фиг.3, 9), открытие которых зависит от пневматического (гидравлического) сигнала управления подаваемого на пневмоклапаны (гидроклапаны), установленных в этих же сквозных гнездах 15, либо герметично подключенных непосредственно к сквозным гнездам 15 снаружи верхней платы 7. В случаях, когда исполнительные механизмы, подключаемые к выходным каналам предлагаемого устройства, имеют собственные дренажные системы, управляемые клапаны не подключаются и дренажный канал постоянно перекрыт.
Необходимо отметить, что в каждый дискретный момент времени давление рабочей среды подается только по одной из n входных пневматических (гидравлических) линий 14 предлагаемого устройства (см. фиг.2). Выходная комбинация распределения потока рабочей среды на m выходных линиях зависит от того, по какой из n входных линий подано давление рабочей среды.
Если возникает необходимость в программной перестройке устройства, средняя плата 6 поворачивается в определенное положение относительно верхней 7 и нижней 8 плат, обеспечивая тем самым замену программ распределения потока рабочей среды на выходах предлагаемого устройства (см. фиг.2, 10). Например, на фиг.10 средняя плата 6 условно разделена на три части с десятью различными наборами программ в каждой. Черным цветом закрашены сквозные гнезда 19 средней платы, в которых установлены пробки заглушки 27, а в остальных сквозных гнездах (кроме сквозных соединительных отверстий 36 (см. фиг.4, 10)) устанавливаются обратные клапаны 25 и 26 (см. фиг.9). При недостаточном количестве программных комбинаций, заложенных в средней плате 6, имеется возможность перепрограммирования средней платы путем перестановки обратных клапанов 25 и пробок-заглушек 27 на уже работающем устройстве, т.к. всегда имеется часть средней платы, находящейся вне работы. Если емкость средней платы достаточна для реализации всех необходимых программ, то в неработающих узлах (где должны устанавливаться пробки-заглушки) сквозные гнезда 19 (см. фиг.4, 7) вообще не выполняются, и, следовательно, полностью отсутствует необходимость в пробках-заглушках. В этом случае перестройка устройства возможна только поворотом средней палаты.
Поворот цилиндра средней платы на определенный угол, в свою очередь, может осуществляться пневматическим (гидравлическим) сервоприводом (на фиг.10 не показан).
Использование предлагаемого изобретения по сравнению с прототипом позволит существенно упростить процесс перестройки, значительно увеличить программную емкость программно-перестраиваемого устройства, а также расширить область применения для максимально жестких условий эксплуатации.
Таким образом, оригинальность конструкции предлагаемого устройства, основанная на геометрической форме плат, и применение клапанов, устанавливаемых в дренажных каналах, с пневматическим (гидравлическим) управлением, обеспечивают наличие признаков новизны и позволяют достичь цели изобретения обозначенной выше.
Основными графическим материалом, поясняющим суть изобретения, являются фиг.2, 3, 4, 5, 7, 9, 10.
Литература
1. Патент на полезную модель №64792 РФ. Программная матрица для пневматических систем управления дискретного действия / Мухопад Ю.Ф., Бовкун А.Ф., Комков А.З. - Опубл. в бюл. №19. - 10.07.2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАРТРИДЖ ДЛЯ ОСУШИТЕЛЯ ВОЗДУХА | 2004 |
|
RU2351387C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УРОВНЯ ВОДЫ В ЗАКРЫТОЙ ДРЕНАЖНОЙ СЕТИ | 2016 |
|
RU2624663C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПЛАСТОВ В ПРОЦЕССЕ БУРЕНИЯ НЕФТЕГАЗОВЫХ СКВАЖИН И ОПРОБОВАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492323C1 |
| ПНЕВМАТИЧЕСКИЙ КЛАПАН С ПИЛОТНЫМ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ | 2010 |
|
RU2440531C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ПОДГОТОВКИ ОБРАЗЦОВ И ПРИМЕНЕНИЕ В ИНТЕГРИРОВАННОЙ СИСТЕМЕ АНАЛИЗА | 2010 |
|
RU2559541C2 |
| СИСТЕМЫ И СПОСОБЫ БИОХИМИЧЕСКОГО АНАЛИЗА, ВКЛЮЧАЮЩИЕ ОСНОВНОЙ ПРИБОР И СЪЕМНЫЙ КАРТРИДЖ | 2015 |
|
RU2682546C2 |
| УСТАНОВКА ДЛЯ ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2021 |
|
RU2767102C1 |
| ГИДРОПАНЕЛЬ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1971 |
|
SU305460A1 |
| РЕГУЛЯТОР РАСХОДА ЖИДКОСТИ | 2000 |
|
RU2185652C2 |
| Сменный картридж для проведения биохимических реакций | 2015 |
|
RU2785864C2 |
Изобретение относится к автоматике и может быть использовано для программно-перестраиваемых управляющих устройств в пневматических и гидравлических системах управления дискретного действия, в системах управления мобильными объектами различного назначения. Технический результат - упрощение процесса перестройки программной матрицы и увеличение количества заложенных в матрицу программ без увеличения ее размерности. Технический результат достигается изменением геометрической формы плат, составляющих программную матрицу, и использованием клапанов с пневматическим или гидравлическим управлением, устанавливаемых в дренажных каналах. Платы имеют следующую геометрическую форму: средняя плата, цилиндрической формы заключена между верхней и нижней, причем кривизна верхней и нижней плат такова, что они плотно прилегают к внешней и внутренней поверхностям цилиндра средней платы. Средняя плата подвижна вокруг оси цилиндра относительно верхней и нижней плат. При необходимости в программной перестройке устройства средняя плата поворачивается в определенное положение относительно верхней и нижней плат, обеспечивая тем самым замену программы распределения потока рабочей среды на выходах предлагаемого устройства без его разборки. 1 з.п., 13 ил.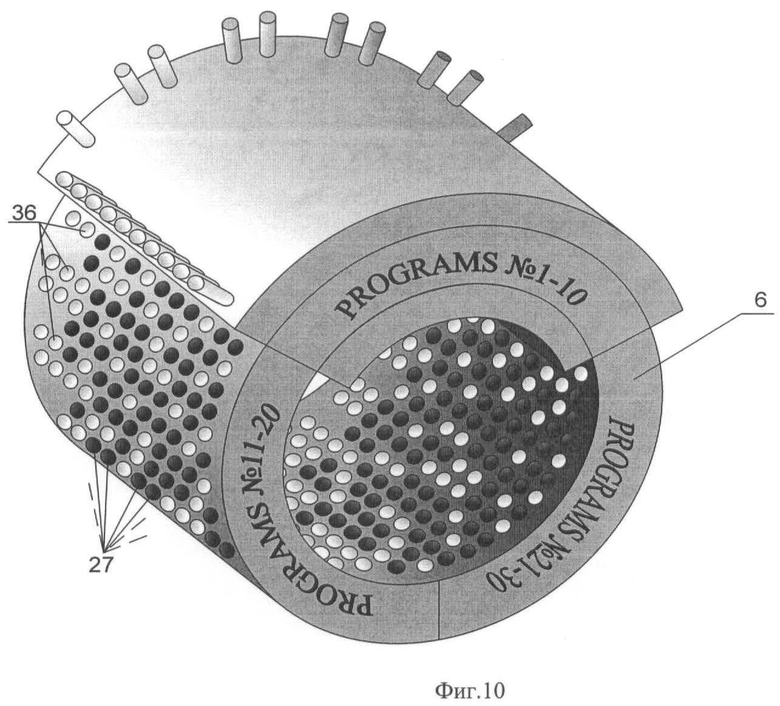
1. Программно-перестраиваемое устройство для пневматических и гидравлических систем управления, содержащее три платы, соединенные между собой и образующие матричную структуру с реализацией принципа геометрического кодирования, отличающееся тем, что средняя плата имеет цилиндрическую форму, а верхняя и нижняя платы имеют криволинейные поверхности с кривизной плоскости, позволяющей обеспечить их плотное сопряжение с внешней и внутренней поверхностями цилиндра средней платы.
2. Программно-перестраиваемое устройство для пневматических и гидравлических систем управления по п.1, отличающееся тем, что в дренажных каналах, выполненных в верхней плате, установлены клапаны с пневматическим или гидравлическим управлением.
| ЛЕДОКОЛЬНОЕ СУДНО | 1938 |
|
SU64792A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СУШКИ ДЕРЕВЯННЫХ ФИГУРНЫХ ИЗДЕЛИЙ | 1927 |
|
SU8657A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

