Изобретение относится к области воздушного мониторинга с применением беспилотных летательных аппаратов и может быть использовано в системах дистанционного контроля состояния особо важных объектов различного назначения, государственной границы в горной местности, магистральных, региональных и локальных топливо-, нефте- и газопроводов, хранилищ, высоковольтных ЛЭП и других протяженных объектов различной конфигурации.
В последнее время возрастает актуальность оперативного получения достоверной комплексной оценки состояния протяженных, сосредоточенных или пространственно распределенных многопараметрических объектов (далее по тексту - ПО) по данным разнородной диагностической (измерительной) информации, поступающей от средств диагностики (измерения) в различных физических полях [Положение по организации и проведению комплексного диагностирования линейной части магистральных газопроводов ЕСГ, М.: ВНИИГаз, 1998 г.; Микрюков В.Ю. Безопасность жизнедеятельности, Феникс, Ростов-на-Дону, 2007 г.; Коробкин В.И., Передельский Л.В. Экология, Феникс, Ростов-на-Дону, 2007 г.].
К настоящему моменту времени предложен ряд технических решений, предназначенных для получения оценок состояния ПО.
Известна система экологического мониторинга, содержащая средства для сбора и передачи информации о состоянии различных сред, характеризующих состояние региона [Патент на изобретение, Россия, №2079891, МПК G08C 19/00, 20.05.1997 г.]. В данной системе группы датчиков экологического контроля за состоянием различных параметров среды подключены к каналам радиосвязи и к телефонной сети для передачи информации по экологическому мониторингу на центральный пункт контроля. Данная система требует значительных затрат как при ее развертывании, так и при эксплуатации. Кроме того, в предложенном техническом решении не реализовано сопряжение этой системы с компьютерными системами органов управления различного уровня, что делает невозможным обмен компьютерной, телевизионной и телефонной информацией о состоянии объектов в масштабе времени, близком к реальному.
Известен автономный измерительно-вычислительный комплекс для контроля и предупреждения нештатных ситуаций объектов [Патент на изобретение, Россия, №2318235, МПК G05D 19/02, 27.02.2008 г.], набор датчиков которого через последовательно соединенные преобразователи, фильтры и усилители подключены ко входу аналого-цифрового преобразователя, выход которого подключен к оперативной ЭВМ, управляющей приемо-передающей аппаратурой, обеспечивающей связь с центральным контроллером-накопителем. При эксплуатации данного комплекса необходимо обеспечить передачу больших потоков измерений с последующей их обработкой и анализом по методикам, вследствие чего требуются значительные временные и материальные затраты для получения достоверных результатов о штатном или нештатном функционировании объекта.
Наиболее близким аналогом к предлагаемому комплексу является «Автоматический беспилотный комплекс диагностики протяженных объектов, оснащенных собственной информационной системой» [Патент на изобретение, Россия, №2343438, G01M 3/00, 10.01.2009 г.], который и выбран в качестве прототипа.
Комплекс содержит дистанционно-пилотируемый летательный аппарат (ДПЛА) вертолетного типа, на котором установлены подсоединенные к первой информационной шине (ИШ) система автоматического управления с блоком управления бортовыми системами, система автоматического дистанционного управления полетом ДПЛА и работой его систем, бортовая система диагностики состояния протяженных объектов (БСДСПО) с комплектом бортовых датчиков и бортовая приемо-передающая аппаратура радиотелеметрической системы (БАРТС) с приемной и передающей антеннами, а также мобильный наземный пункт управления (МНПУ) ДПЛА, состоящий из подсоединенных ко второй ИШ пульта управления ДПЛА, пульта управления БСДСПО и наземной приемо-передающей аппаратуры радиотелеметрической системы (НАРТС) с приемной и передающей антеннами, при этом МНПУ подключен модемом к многоканальной линии передачи данных (МКЛПД), объединяющей центральный пункт эксплуатации протяженного объекта (ЦПЭПО), N локальных пунктов (ЛП) протяженного объекта, а также не менее чем N установленных на ЛП наземных подсистем диагностики состояния протяженного объекта (НПДСПО), каждая из которых состоит из подключенных к третьей ИШ пульта наземной диагностики (ПНД), комплекта встроенных датчиков и комплекта автономных датчиков, размещенных вблизи участка протяженного объекта, при этом ПНД подключен модемами к МКЛПД и к комплекту НАРТС.
Прототип обеспечивает диагностику состояния протяженного объекта и передачу информации о результатах диагностики в собственную информационную систему протяженного объекта из любой его точки. Однако в информационную систему протяженного объекта от комплекса поступают значительные потоки подлежащей обработке операторами диагностической информации без исключения из них несущественных данных (т.е. не содержащих информации об аномальных значениях диагностируемых параметров). Операторы собственной информационной системы отслеживают поступающую информацию в реальном масштабе времени или в записи. Данное обстоятельство ограничивает функциональные возможности комплекса в части одновременного отображения результатов допусковой оценки всех диагностируемых разнородных параметров ПО и приводит к недостаточным оперативности и точности диагностики состояния протяженных объектов.
Задачей настоящего изобретения являются расширение функциональных возможностей устройства в части одновременного компактного представления разнородной диагностической информации о состоянии протяженного объекта и его изменениях и повышение за счет этого оперативности и точности диагностики состояния протяженных объектов.
Поставленная задача решается за счет того, что в автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой, содержащий дистанционно-пилотируемый летательный аппарат (ДПЛА) вертолетного типа, на котором установлены подсоединенные к первой ИШ система автоматического управления с блоком управления бортовыми системами, система автоматического дистанционного управления полетом ДПЛА и работой его систем, бортовая система диагностики состояния протяженных объектов (БСДСПО) с комплектом бортовых датчиков и бортовая приемо-передающая аппаратура радиотелеметрической системы (БАРТС) с приемной и передающей антеннами, а также мобильный наземный пункт управления (МНПУ) ДПЛА, состоящий из подсоединенных ко второй ИШ пульта управления ДПЛА, пульта управления БСДСПО и наземной приемо-передающей аппаратуры радиотелеметрической системы (НАРТС) с приемной и передающей антеннами, при этом МНПУ подключен модемом к многоканальной линии передачи данных (МКЛПД), объединяющей центральный пункт эксплуатации протяженного объекта (ЦПЭПО) и N локальных пунктов протяженного объекта (ЛП), а также не менее чем N установленных на ЛП наземных подсистем диагностики состояния протяженного объекта (НПДСПО), каждая из которых состоит из подключенных к третьей ИШ пульта наземной диагностики (ПНД), комплекта встроенных датчиков и комплекта автономных датчиков, размещенных вблизи участка протяженного объекта, при этом ПНД подключены модемами к МКЛПД и к комплектам НАРТС. Новым является то, что в БСДСПО и в каждую НПДСПО дополнительно введены преобразователь значений выходных сигналов комплекта бортовых датчиков БСДСПО и автономных датчиков НПДСПО и преобразователь значений выходных сигналов комплекта встроенных датчиков НПДСПО в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния протяженного объекта допустимым, который выполнен в виде последовательно соединенных блока памяти допустимых значений диагностируемых параметров, четных входов блока элементов «И» и вычислителя, при этом комплект бортовых датчиков БСДСПО и комплект встроенных датчиков НПДСПО подключены к нечетным входам соответствующих блоков элементов «И», а выходы вычислителей БСДСПО и НПДСПО подсоединены соответственно к первой и второй ИШ, а также в состав пульта управления БСДСПО МНПУ, в состав каждого ПНД НПДСПО и в ЦПЭПО дополнительно введено по одному программному модулю, обеспечивающему формирование цветографических образов (ЦГО) состояния протяженного объекта, выход которого соединен со второй, третьей и четвертой ИШ соответственно.
На фиг.1 представлен автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой;
на фиг.2 показано применение комплекса для диагностики состояния отдельных участков ПО;
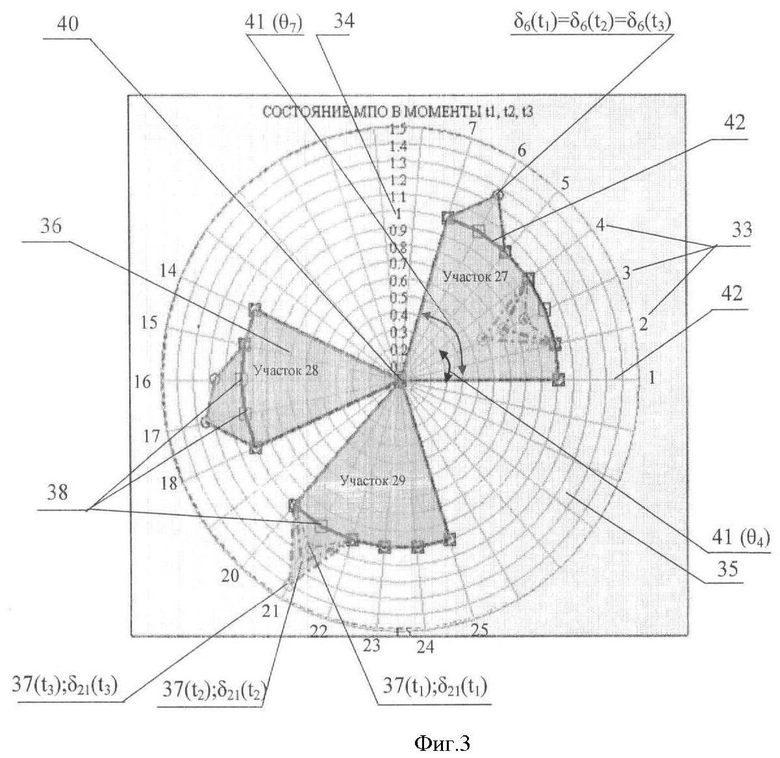
на фиг.3 представлен объединенный ЦГО состояния ПО, сформированный на ЦПЭПО на момент времени t3.
на фиг.4 представлена схема взаимодействия БСДПО с МНПУ ДПЛА;
на фиг.5 представлена схема взаимодействия БСДСПО с НПДСПО;
на фиг.6 представлена схема взаимодействия БСДСПО с автономным датчиком при возникновении на ПО нештатной ситуации.
В таблице 1 представлены формы матриц состояния δi1, δi2 и δi3 соответственно.
Автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой (фиг.1), (далее по тексту - комплекс) содержит дистанционно-пилотируемый летательный аппарат (ДПЛА) вертолетного типа 1, на котором установлены подключенные ИШ 2.1 система автоматического управления с блоком управления бортовыми системами 3, система автоматического дистанционного управления полетом ДПЛА и работой его систем 4, бортовая система диагностики состояния протяженных объектов (БСДСПО) 5 с комплектом бортовых датчиков 6, преобразователь 7.1 значений выходных сигналов комплекта бортовых датчиков БСДСПО и комплекта автономных датчиков НПДСПО в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния протяженного объекта допустимым (далее по тексту - преобразователь), блок элементов «И» 8.1, нечетные входы которого соединены с выходами датчиков 6, а четные входы - с блоком памяти допустимых значений диагностируемых параметров 9.1, при этом выходы блока элементов «И» 8.1 соединены со входом вычислителя 10.1, а выход вычислителя 10.1 с ИШ 2.1, бортовая приемо-передающая аппаратура радиотелеметрической системы (БАРТС) 11 с приемо-передающей антенной 12.1, а также мобильный наземный пункт управления (МНПУ) ДПЛА 13, на котором установлены подключенные к ИШ 2.2 пульт управления ДПЛА 14, пульт управления БСДСПО 15 с программным модулем 16.1, обеспечивающим формирование ЦГО состояния протяженного объекта, НАРТС 17.1 с приемо-передающей антенной 12.2, кроме того МНПУ 13 подключен модемом 18 к многоканальной линии передачи данных (МКЛПД) 19, объединяющей N локальных пунктов (ЛП) 20 протяженного объекта (ПО) 21 и центральный пункт эксплуатации протяженного объекта (ЦПЭПО) 22.
В состав собственной информационной системы протяженного объекта (фиг.1) входит ЦПЭПО 22 с НАРТС 17.2 с приемо-передающей антенной 12.2 и подключенным к ИШ 2.4 программным модулем 16.2, обеспечивающим формирование ЦГО состояния протяженного объекта, не менее чем N наземных подсистем диагностики состояния протяженного объекта (НПДСПО) 23, каждая из которых включает подключенные к ИШ 2.3 пульт наземной диагностики (ПНД) 24, компьютер которого осуществляет сбор, хранение, обработку и отображение (с помощью программного модуля 16.3) данных о состоянии участка ПО 21 в виде ЦГО, комплект встроенных датчиков 25, информация с которых по проводным и/или беспроводным каналам связи выводится на ПНД 24, преобразователь 7.2 значений выходных сигналов комплекта встроенных датчиков 25 НПДСПО в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния протяженного объекта допустимым, блок элементов «И» 8.2, нечетные входы которого соединены с выходами датчиков 25, а четные входы - с блоком памяти допустимых значений диагностируемых параметров 9.2, при этом выходы блока элементов «И» 8.2 соединены со входом вычислителя 10.2, а выход вычислителя 10.2 с ИШ 3.1, и комплект размещенных вблизи участка ПО 21 автономных датчиков 26, снабженных накопителем информации и маломощной радиоаппаратурой (модемом) передачи информации с них на ДПЛА 1. ПНД 24 расположены в локальных пунктах 20 и информационно соединены между собой МКЛПД 19, кроме того ПНД 24 подключен модемом к НАРТС 17.3 с приемо-передающей антенной 12.4. В качестве локальных пунктов 20 могут быть, например перекачивающие станции, распределительные подстанции, пульты охраны, контрольно-пропускные пункты, погранзаставы и другие узловые элементы эксплуатации ПО 21.
Работа автоматического беспилотного комплекса диагностики состояния протяженных объектов, оснащенных собственной информационной системой, осуществляется следующим образом (фиг.2…6).
При подготовке к работе на ДПЛА 1 в соответствии с его грузоподъемностью, дальностью полета и полетным заданием устанавливается комплект БСДСПО 5 для дистанционного сбора информации (выполненные известными способами фотографические, телевизионные, инфракрасные, радиолокационные, радиационные, магнитометрические, лазерные сканирующие, ультрафиолетовые и другие дистанционные датчики в различном сочетании). После ввода в систему автоматического управления 2 ДПЛА 1 электронной карты объекта, полетного задания и заправке ДПЛА 1 на предлагаемом комплексе дополнительно выполняются следующие семь операций.
Первая операция: Ввод в полетное задание набора идентификаторов ID={IU, IP, IA, IY}, где IU={IUi}, i=1, …, I - идентификаторы участков ПО, IP={IPkn}, n=1, …, N - идентификаторы ЛП, IA={IAid}, d=1, …, D - идентификаторы автономных датчиков и IY={IYij}, j=1, …, J - идентификаторы диагностируемых параметров состояния ПО.
Вторая операция: Ввод в блок памяти 9.1 преобразователя 7.1 БСДСПО 5 двух матриц, первая из которых  содержит нижние и верхние границы интервалов допустимых значений для параметров
содержит нижние и верхние границы интервалов допустимых значений для параметров  состояния участков ПО 21, подлежащих диагностике с помощью комплекта бортовых датчиков 6 БСДСПО 5; а вторая матрица
состояния участков ПО 21, подлежащих диагностике с помощью комплекта бортовых датчиков 6 БСДСПО 5; а вторая матрица  - нижние и верхние границы интервалов допустимых значений для параметров
- нижние и верхние границы интервалов допустимых значений для параметров  состояния участков ПО 21, подлежащих диагностике с помощью комплекта автономных датчиков 26 НПДСПО 23 соответственно.
состояния участков ПО 21, подлежащих диагностике с помощью комплекта автономных датчиков 26 НПДСПО 23 соответственно.
Третья операция: Ввод в вычислитель 10.1 преобразователя 7.1 БСДСПО 5 унифицированных правил (выражение 1), обеспечивающих:
преобразование собранных комплектом бортовых датчиков 6 БСДСПО 5 данных о состоянии участка ПО 21 в количественные значения признаков соответствия или несоответствия фактических значений продиагностированных параметров данного участка допустимым (далее по тексту - признаки соответствия);

 ;
;
формирование матрицы состояния δi1, элементам которой присваивают количественные значения признаков соответствия  .
.
Четвертая операция: Ввод в вычислитель 10.1 преобразователя 7.1 БСДСПО 5 унифицированных правил (выражение 2), обеспечивающих:
преобразование собранных автономными датчиками 6 БСДСПО 5 данных о состоянии участка ПО 21 в количественные значения признаков соответствия;

формирование матрицы состояния δi2, элементам которой присваивают количественные значения признаков соответствия  .
.
Пятая операция: Ввод в блок памяти 9.2 преобразователя 7.2 НПДСПО 23 матрицы  , содержащей нижние и верхние границы интервалов допустимых значений для параметров
, содержащей нижние и верхние границы интервалов допустимых значений для параметров  состояния участков ПО 21, подлежащих диагностике с помощью комплекта встроенных датчиков 25 НПДСПО 23.
состояния участков ПО 21, подлежащих диагностике с помощью комплекта встроенных датчиков 25 НПДСПО 23.
Шестая операция: ввод в вычислители 10.2 преобразователей 7.2 НПДСПО 23 совокупности унифицированных правил (выражение 3), обеспечивающих:
преобразование собранных комплектом встроенных датчиков 25 НПДСПО 23 данных о состоянии участка ПО 21 в количественные значения признаков соответствия;
 ;
;
формирование матрицы состояния δi3, элементам которой присваивают количественные значения признаков соответствия  .
.
Седьмая операция: ввод в программные модули 16.1, 16.2 и 16.3 совокупности правил (выражение 4), обеспечивающих:
формирование на ЦПЭПО 23 ЦГО состояния ПО 21 (фиг.3);
формирование на МНПУ 13 ЦГО состояния участков ПО 21 и состояния ПО 21;
формирование на ПНД 24 НПДСПО 23 ЦГО состояния участков ПО 21;

где  ,
,
J - количество диагностируемых параметров состояния ПО;
ω - градусная мера радиана.
После выполнения вышеуказанных дополнительных операций ДПЛА 1 совершает автоматический маловысотный полет над объектом на высоте 5…50 м со скоростью от 0 до 100…140 км/час. В каждом полете диагностируется участок ПО 21 в пределах дальности полета ДПЛА 1. Информация о состоянии этого участка протяженного объекта 21 поступает на борт ДПЛА 1 от комплекта бортовых датчиков 6 БСДСПО 5, а также по радиоканалам 31 БАРТС 11 по ее запросу от комплекта автономных датчиков 26 НПДСПО 23 во время пролета ДПЛА 1 над этими датчиками.
Далее непосредственно на ДПЛА 1 реализовано оперативное (в масштабе времени, близком к реальному) объединение и компактное представление разнородных данных о состоянии участка протяженного объекта в виде матрицы состояния δi1 (таблица 1) и/или матрицы состояния δi2 (таблица 2) и последующая передача данных матриц в соответствии со схемой взаимодействия, приведенной на фиг.4, через БАРТС 11 по радиоканалу 30 на НАРТС 18.1 МНПУ 13 и/или в соответствии со схемой взаимодействия, приведенной на фиг.5, на НАРТС 18.3 ближайшего к ДПЛА 1 локального пункта 20 и далее по МКЛПД 19 на ЦПЭПО 22. С этой целью вся полученная ДПЛА 1 информация о состоянии участка ПО 21 подвергается дополнительной обработке, заключающейся в том, что измеренные датчиками 6 и автономными датчиками 26 значения параметров  и/или
и/или  поступают в преобразователь 7.1, где вычисляются количественные значения признаков соответствия. При этом с помощью блока элементов «И» 8.1 и блока памяти 9.1 допустимых значений диагностируемых параметров проверяется выполнение условий
поступают в преобразователь 7.1, где вычисляются количественные значения признаков соответствия. При этом с помощью блока элементов «И» 8.1 и блока памяти 9.1 допустимых значений диагностируемых параметров проверяется выполнение условий  или
или  , a c помощью вычислителя 10.1 в соответствии с выражениями (1) или (2) определяют величины
, a c помощью вычислителя 10.1 в соответствии с выражениями (1) или (2) определяют величины  и
и  или
или  и
и  являющиеся признаками соответствия. Затем вычислитель 10.1 формирует матрицу состояния δi1 или матрицу состояния δi2, элементам которых присваивают вычисленные значения признаков соответствия
являющиеся признаками соответствия. Затем вычислитель 10.1 формирует матрицу состояния δi1 или матрицу состояния δi2, элементам которых присваивают вычисленные значения признаков соответствия  или
или  . Таким образом, на МНПУ 13 и на ЦПЭПО 22 операторам для обработки поступают только матрицы состояния δi1 и δi2, а не весь массив поступающей на ДПЛА 1 диагностической информации, как это реализовано в прототипе. Данное обстоятельство существенно снижает уровень загрузки используемых в прототипе радиотелеметрических систем и многоканальной линии передачи данных.
. Таким образом, на МНПУ 13 и на ЦПЭПО 22 операторам для обработки поступают только матрицы состояния δi1 и δi2, а не весь массив поступающей на ДПЛА 1 диагностической информации, как это реализовано в прототипе. Данное обстоятельство существенно снижает уровень загрузки используемых в прототипе радиотелеметрических систем и многоканальной линии передачи данных.
Технический результат достигается также тем, что за счет введения в состав каждого ПНД 24 НПДСПО 23 преобразователя 7.2 обеспечивается оперативное (в масштабе времени, близком к реальному) объединение и компактное представление полученных комплектом встроенных датчиков 22 разнородных данных о состоянии участка ПО 21 в виде матрицы состояния δi3 (табл.3), которая по МКЛПД 19 поступает на ЦПЭПО 22. С этой целью вся полученная комплектом встроенных датчиков 25 информация  о состоянии участка ПО 21 поступает в преобразователь 7.2, где вычисляются количественные значения признаков соответствия. При этом с помощью блока элементов «И» 8.2 и блока памяти 9.2 допустимых значений диагностируемых параметров проверяется выполнение условия
о состоянии участка ПО 21 поступает в преобразователь 7.2, где вычисляются количественные значения признаков соответствия. При этом с помощью блока элементов «И» 8.2 и блока памяти 9.2 допустимых значений диагностируемых параметров проверяется выполнение условия  , а с помощью вычислителя 10.1 в соответствии с выражением (3) определяют величины
, а с помощью вычислителя 10.1 в соответствии с выражением (3) определяют величины  и
и  , являющиеся признаками соответствия. Затем вычислитель 10.2 формирует матрицу состояния δi3, элементам которых присваивают вычисленные значения признаков соответствия
, являющиеся признаками соответствия. Затем вычислитель 10.2 формирует матрицу состояния δi3, элементам которых присваивают вычисленные значения признаков соответствия  . Далее по МКЛПД 19 осуществляется передача сформированой матрицы состояния δi3 на ЦПЭПО 22. Таким образом, на ЦПЭПО 22 от НПДСПО 23 для обработки операторами поступают только матрицы состояния δi3, а не весь массив поступающей на НПДСПО 23 диагностической информации, как это реализовано в прототипе. Данное обстоятельство дополнительно снижает уровень загрузки используемой в прототипе многоканальной линии передачи данных.
. Далее по МКЛПД 19 осуществляется передача сформированой матрицы состояния δi3 на ЦПЭПО 22. Таким образом, на ЦПЭПО 22 от НПДСПО 23 для обработки операторами поступают только матрицы состояния δi3, а не весь массив поступающей на НПДСПО 23 диагностической информации, как это реализовано в прототипе. Данное обстоятельство дополнительно снижает уровень загрузки используемой в прототипе многоканальной линии передачи данных.
В заявляемом комплексе операторы на МНПУ 13 и на ЦПЭПО 22 после получения матриц состояния δi1, δi2 и δi3 (только для ЦПЭПО), используя программные модули 16.1 и/или 16.2, входящие в состав пульта управления БСДСПО 16 МНПУ 13 и/или в ЦПЭПО 21, формируют и отображают ЦГО состояния ПО 21 в виде фиг.3 соответственно. Таким образом, достигается наглядность (понятность) представления вида состояния протяженного объекта, что позволяет операторам практически в реальном масштабе времени выявлять факты возникновения нештатных ситуаций на участке ПО 21. Для этого оператору достаточно обнаружить на сформированном ЦГО изломы линии в местах расположения меток, не находящихся на окружности единичного радиуса (например, метку 6 на фиг.3), и далее прервать автоматический полет ДПЛА 1 и ввести режим дистанционного управления ДПЛА 1, при котором ДПЛА 1 может зависнуть над интересующим участком ПО 21 или кружить над ним для детального уточнения ситуации. При этом информация о состоянии этого участка ПО 21 поступает на борт ДПЛА 1 или от датчика 6 БСДСПО 5 - источника  или по радиоканалу 31 БАРТС 11 от автономного датчика 26 - источника
или по радиоканалу 31 БАРТС 11 от автономного датчика 26 - источника  в соответствии с приведенной на фиг.6 схемой взаимодействия автономных датчиков 26 с БСДСПО 5 в нештатной ситуации. После обработки в преобразователе 7.1 измеренных датчиками 6 или 26 значений
в соответствии с приведенной на фиг.6 схемой взаимодействия автономных датчиков 26 с БСДСПО 5 в нештатной ситуации. После обработки в преобразователе 7.1 измеренных датчиками 6 или 26 значений  или
или  на МНПУ 13 и в ЦПЭПО по радиотелеметрическим каналам 30 поступают уточненные матрицы состояния δi1 или δi2, которые используются операторами МНПУ 13 и ЦПЭПО для изменения координат метки на ЦГО с помощью программных модулей 16.1 и/или 16.2. После неоднократного применения предлагаемого комплекса для диагностики состояния ПО 21 на ЦПЭПО 22 с использованием программного модуля 17.2 будет сформировано несколько объединенных ЦГО состояния протяженного объекта и осуществлено их совмещение (см. фиг.3), что позволит более точно определять числовые характеристики тенденций изменения и корреляционные свойства диагностируемых параметров протяженного объекта.
на МНПУ 13 и в ЦПЭПО по радиотелеметрическим каналам 30 поступают уточненные матрицы состояния δi1 или δi2, которые используются операторами МНПУ 13 и ЦПЭПО для изменения координат метки на ЦГО с помощью программных модулей 16.1 и/или 16.2. После неоднократного применения предлагаемого комплекса для диагностики состояния ПО 21 на ЦПЭПО 22 с использованием программного модуля 17.2 будет сформировано несколько объединенных ЦГО состояния протяженного объекта и осуществлено их совмещение (см. фиг.3), что позволит более точно определять числовые характеристики тенденций изменения и корреляционные свойства диагностируемых параметров протяженного объекта.
Таким образом, совокупность существенных признаков предлагаемого комплекса проявляет новые свойства устройства, заключающиеся в том, что:
дополнительная установка на ДПЛА и в каждую наземную подсистему диагностики преобразователя значений выходных сигналов комплекта бортовых датчиков БСДСПО и комплекта автономных датчиков НПДСПО и преобразователя значений выходных сигналов комплекта встроенных датчиков НПДСПО в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния протяженного объекта допустимым позволит оперативно (в масштабе времени, близком к реальному) получить, объединить и компактно представить в виде матрицы разнородные данные о состоянии протяженного объекта и его изменениях, полученные в результате осуществления различных видов диагностики вне зависимости от количества диагностируемых параметров, их физической сущности и единиц измерения, что существенно снижает уровень загрузки используемых в прототипе радиотелеметрических систем и многоканальной линии передачи данных;
дополнительный ввод в состав пульта управления БСДСПО МНПУ, в состав каждого ПНД НПДСПО и в центральный пункт эксплуатации протяженного объекта программных модулей, обеспечивающих формирование ЦГО состояния как отдельных частей протяженного объекта, так и протяженного объекта в целом, совмещение сформированных в различные временные интервалы ЦГО повышает наглядность (понятность) представления вида состояния протяженного объекта и позволяет более точно определять числовые характеристики тенденций изменения и корреляционные свойства диагностируемых параметров протяженного объекта.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, идентичных всем признакам заявляемого технического решения, отсутствуют, что указывает на соответствие заявляемого изобретения критерию охраноспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого комплекса, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками.
Из уровня техники также не подтверждена известность влияния отличительных признаков заявляемого изобретения на указанный заявителем технический результат, следовательно, заявляемое изобретение соответствует условию «изобретательский уровень».
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартные комплектующие и языки программирования общего пользования.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме | 2023 |
|
RU2821208C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП | 2022 |
|
RU2789896C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2714845C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |





Изобретение относится к области воздушного мониторинга с применением беспилотных летательных аппаратов, и может быть использовано в системах дистанционного контроля состояния особо важных объектов различной конфигурации. Техническим результатом является повышение оперативности и точности диагностики состояния протяженных объектов (ПО) за счет одновременного компактного представления диагностической информации о состоянии ПО и его изменениях. В комплекс дополнительно введены преобразователи значений выходных сигналов в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния ПО допустимым и программные модули, обеспечивающие формирование цветографических образов состояния ПО. 6 ил., 3 табл.
Автоматический беспилотный комплекс диагностики состояния протяженных объектов, оснащенных собственной информационной системой, содержащий дистанционно пилотируемый летательный аппарат (ДПЛА) вертолетного типа, на котором установлены подсоединенные к первой информационной шине (ИШ) система автоматического управления с блоком управления бортовыми системами, система автоматического дистанционного управления полетом ДПЛА и работой его систем, бортовая система диагностики состояния протяженных объектов (БСДСПО) с комплектом бортовых датчиков и бортовая приемопередающая аппаратура радиотелеметрической системы (БАРТС) с приемной и передающей антеннами, а также содержит мобильный наземный пункт управления (МНПУ) ДПЛА, состоящий из подсоединенных ко второй ИШ пульта управления ДПЛА, пульта управления БСДСПО и наземной приемопередающей аппаратуры радиотелеметрической системы (НАРТС) с приемной и передающей антеннами, при этом МНПУ ДПЛА подключен модемом к многоканальной линии передачи данных (МКЛПД), объединяющей центральный узел эксплуатации протяженного объекта (ЦПЭПО) и N локальных пунктов протяженного объекта (ЛП), а также не менее чем N установленных на ЛП наземных подсистем диагностики состояния протяженных объектов (НПДСПО), каждая из которых состоит из пульта наземной диагностики (ПНД) и комплекта встроенных датчиков, подсоединенных к третьей ИШ, и размещенных вблизи участка протяженного объекта комплекта автономных датчиков, при этом ПНД подключен модемом к МКЛПД и к НАРТС с приемной и передающей антеннами, отличающийся тем, что в БСДСПО и в каждую НПДСПО дополнительно введены преобразователь значений выходных сигналов комплекта бортовых датчиков БСДСПО и комплекта автономных датчиков НПДСПО и преобразователь значений выходных сигналов комплекта встроенных датчиков НПДСПО в количественные значения признаков соответствия фактических значений диагностируемых параметров состояния протяженного объекта допустимым, который выполнен в виде последовательно соединенных блока памяти допустимых значений диагностируемых параметров, четных входов блока элементов «И» и вычислителя, при этом комплект бортовых датчиков БСДСПО и комплект встроенных датчиков НПДСПО подключены к нечетным входам соответствующих блоков элементов «И», выходы вычислителей БСДСПО и НПДСПО подсоединены соответственно к первой и четвертой ИШ, а также в состав пульта управления БСДСПО МНПУ, в состав каждого ПНД НПДСПО и в ЦПЭПО дополнительно введено по одному подсоединенному соответственно ко второй, третьей и четвертой ИШ программному модулю, обеспечивающему формирование цветографических образов (ЦГО) состояния протяженного объекта.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2428722C2 |
| ЭКОЛОГИЧЕСКАЯ СИСТЕМА СБОРА ИНФОРМАЦИИ О СОСТОЯНИИ РЕГИОНА | 1992 |
|
RU2079891C1 |
| US 6654709 B2, 25.11.2003. | |||

