Область техники
Изобретение относится к устройству, способу и компьютерной программе для определения положения первого объекта во втором объекте.
Уровень техники
В US 2006/0241413 A1 раскрыт способ определения положения инструмента в структуре объекта с использованием рентгеновской системы. Трехмерное изображение обеспечивается, по меньшей мере, одной областью объекта, релевантной для определения положения. Рентгеновская система регистрируется с помощью трехмерного изображения и, после ввода инструмента в структуру, по меньшей мере, одно двухмерное рентгеновское изображение релевантной зоны получается в известной проекционной геометрии с использованием рентгеновской системы. Двухмерное положение инструмента определяется в двухмерном рентгеновском изображении, и линия проекции в соответствии с известной проекционной геометрией проводится через трехмерное изображение в двухмерном положении, причем трехмерное положение инструмента в трехмерном изображении определяется из пересечения линии проекции со структурой.
В WO 00/72264 A1 раскрыта система определения положения, которая особенно пригодна, чтобы определять положение актера в студии на основании идентификации части актера в изображении, полученном с помощью камеры в известном положении и определения положения актера на основании положения камеры и высоты части. Согласно варианту осуществления, положение актера в студии определяется на основании идентификации стоп актера в изображении, полученном с помощью камеры при известном положении камеры, и определения положения стоп актера на основании положения камеры и предположения, что стопы обычно являются самой низкой видимой частью актера в изображении. До определения положения актера выполняется процедура калибровки, обеспечивающая отображающую функцию, которая отображает каждое место в изображении, полученном с помощью камеры с места на полу, причем после калибровки для определения положения актера положение стоп идентифицируется в изображении, и это определенное положение в изображении отображается в положение на полу с использованием отображающей функции.
В WO 2005/020148 A1 раскрыты аппарат и способ для наложенного отображения текущего (рентгеновского) изображения катетера и изображения карты сосудистого дерева. Для изображений карты, показывающих сосудистое дерево, через которую катетер должен быть направлен так, чтобы соответствующие дистанционные изображения были вычислены посредством дистанционного преобразования и сохранены в памяти. В текущем изображении катетер сегментирован, и посредством дистанционных изображений затем вычисляется преобразование изображения карты так, что когда текущее изображение и преобразованное изображение карты накладываются на монитор, изображение катетера располагается в сосудистом дереве преобразованного изображения карты.
В WO 01/20552 A1 раскрыт способ для создания изображений во время медицинской процедуры. Трехмерная модель высокого разрешения сердца регистрируется с полученным изображением низкого разрешения, полученного при выполнении медицинской процедуры, и зарегистрированная модель высокого разрешения и изображение низкого разрешения отображаются, причем, поскольку изображение низкого разрешения также может показывать, например, электроды катетера, электроды отображаются на зарегистрированной модели высокого разрешения.
Устройство для определения положения первого объекта во втором объекте используется, например, в области электрофизиологии сердца для локализации трехмерного положения наконечника катетера в сердце пациента. Эти локализованные трехмерные положения наконечника катетера используются для записи мест, представляющих интерес, таких как анатомических ориентиров и/или мест удаления в трехмерном пространстве. Эта известная локализация основана на электромагнитных или ультразвуковых методах трехмерной локализации в реальном времени (с малым временем ожидания). Например, устройство для локализации трехмерного положения наконечника катетера содержит три катушки, излучающие магнитное поле, расположенные вблизи пациента, и соответствующий датчик на наконечнике катетера, в котором трехмерное положение наконечника катетера определяется измерениями триангуляции.
Эти известные методы для определения положения первого объекта, подобно наконечнику катетера, во втором объекте, подобно сердцу пациента, сложны, требуют значительного количества оборудования, в частности специализированных катетеров, и поэтому дороги.
Сущность изобретения
Задачей настоящего изобретения является обеспечение устройства, способа и компьютерной программы для определения положения первого объекта во втором объекте, каковое является менее сложным, которое требует меньшего количества оборудования и, поэтому, дешевле.
Согласно первому аспекту настоящего изобретения, предоставлено устройство для определения положения первого объекта во втором объекте, причем первый объект контактирует со вторым объектом в области контакта, причем устройство содержит:
- блок обеспечения для обеспечения трехмерной модели второго объекта,
- проекционный блок для формирования двухмерного проекционного изображения первого объекта и второго объекта,
- блок регистрации для регистрации трехмерной модели с двухмерным проекционным изображением,
- блок определения для определения положения области контакта из положения первого объекта на двухмерном проекционном изображении и зарегистрированной трехмерной модели второго объекта, причем положение области контакта является положением первого объекта во втором объекте.
причем блок определения выполнен так, чтобы положение области контакта определялось путем определения положения, где линия прямой видимости первого объекта пересекает поверхность трехмерной модели.
Изобретение основано на той идее, что двухмерное положение первого объекта, и, таким образом, области контакта, во втором объекте может быть определено с использованием положения первого объекта в двухмерном проекционном изображении, и что положение первого объекта в третьем измерении может быть определено из положения области контакта, которая, предпочтительно, является точкой контакта между первым объектом и вторым объектом, в третьем измерении, предпочтительно, с использованием информации о том, что первый объект располагается на поверхности зарегистрированной трехмерной модели. Поэтому положение первого объекта во втором объекте может быть определено без необходимости в сложном приборе для локализации, подобно трем катушкам, излучающим магнитное поле, и датчику на наконечнике катетера, как в вышеописанном уровне техники. Таким образом, количество оборудования, необходимое для определения положения первого объекта во втором объекте, снижается и, таким образом, стоимость такого устройства также снижается.
Блок обеспечения, предпочтительно, является блоком формирования трехмерной модели для формирования трехмерной модели второго объекта из данных обнаружения второго объекта, полученных от блока формирования данных обнаружения, подобно системе компьютерной томографии, магниторезонансной системе формирования изображения, трехмерной вращательной рентгеновской системе или ультразвуковой системе получения изображения. Блок формирования трехмерной модели, предпочтительно, выполнен с возможностью формировать трехмерную модель второго объекта с использованием известных методов реконструкции для реконструкции второго объекта из полученных данных обнаружения путем сегментации второго объекта в реконструированном изображении и путем поверхностной визуализации сегментированного второго объекта.
Первый объект, предпочтительно, является катетером, который располагается в сердце пациента, которое является вторым объектом. Проекционный блок, предпочтительно, является блоком рентгеноскопии.
Предпочтительно, чтобы проекционный блок выполнен с возможностью формировать двухмерные проекционные изображения в разных проекционных направлениях и чтобы блок регистрации был выполнен с возможностью регистрировать трехмерную модель с помощью разных двухмерных проекционных изображений такими, что в каждом из разных проекционных направлений трехмерная модель регистрируется с помощью соответствующего двухмерного проекционного изображения. Поскольку разные двухмерные проекционные изображения регистрируются в каждом из разных проекционных направлений с трехмерной моделью, двухмерное проекционное изображение регистрируется с трехмерной моделью в каждом произвольно выбранном направлении. Таким образом, трехмерная модель может быть показана в двухмерном проекционном изображении, имеющем произвольно выбранное проекционное направление. Кроме того, определение положения первого объекта может быть выполнено с использованием проекционного изображения произвольно выбранного проекционного направления без необходимости в регистрации трехмерной модели с помощью этого двухмерного проекционного изображения. Это сокращает время, необходимое для определения положения первого объекта во втором объекте, если пользователь хочет определить положение первого объекта во втором объекте после изменения положения первого объекта и проекционного направления.
Линией прямой видимости является линия, заданная положением первого объекта в двухмерном проекционном изображении и положением источника проекционного блока, который, предпочтительно, является рентгеновским источником, в частности фокальным пятном рентгеновского источника. Эта линия прямой видимости и точка пересечения между этой линией прямой видимости и трехмерной моделью может быть легко определена, что позволяет определить положение первого объекта во втором объекте с низкими вычислительными затратами.
Предпочтительно, чтобы устройство дополнительно содержало блок выбора для выбора, какая из двух или более точек пересечения линии прямой видимости с трехмерной моделью соответствует положению области контакта. Также предпочтительно, чтобы устройство содержало блок визуализации для визуализации трехмерной модели, линии прямой видимости и двух или более точек пересечения при виде сбоку, и чтобы блок выбора содержал блок ввода, позволяющий пользователю выбирать одну из двух или более точек пересечения в качестве положения области контакта. Также предпочтительно, чтобы проекционный блок был выполнен с возможностью формировать, по меньшей мере, два двухмерных проекционных изображения первого объекта и второго объекта в, по меньшей мере, двух проекционных направлениях, чтобы блок определения был выполнен с возможностью определять положение области контакта, где линия прямой видимости первого объекта относительно проекционного направления одного из двухмерных проекционных изображений пересекает трехмерную модель, чтобы блок выбора был выполнен с возможностью выбирать, какая из двух или более точек пересечения линии прямой видимости с трехмерной моделью соответствует положению области контакта, с использованием, по меньшей мере, одного из других двухмерных проекционных изображений. Эти предпочтительные варианты осуществления для определения положения первого объекта во втором объекте могут быть легко реализованы на компьютерной системе, и они также требуют очень низких вычислительных затрат.
Линия прямой видимости пересекает трехмерную модель, в общем случае, в двух точках пересечения, в частности, если трехмерная модель не очень сложна. Однако в более сложной трехмерной форме второго объекта и поэтому у трехмерной модели, может существовать более двух точек пересечения.
В еще одном варианте осуществления, проекционный блок выполнен с возможностью формирования, по меньшей мере, двух двухмерных проекционных изображений первого объекта и второго объекта в, по меньшей мере, двух проекционных направлениях, причем блок определения выполнен с возможностью определения, по меньшей мере, двух линий прямой видимости первого объекта для, по меньшей мере, двух проекционных направлений, причем блок определения дополнительно выполнен с возможностью определения точки пересечения, по меньшей мере, двух линий прямой видимости, причем блок определения дополнительно выполнен с возможностью перемещения точки пересечения на поверхность трехмерной модели, причем перемещенная точка пересечения является определенным положением области контакта. Теоретически, точка пересечения, по меньшей мере, двух линий прямой видимости должна быть расположена на поверхности второго объекта, поскольку первый объект контактирует со вторым объектом, но в действительности, ввиду возможных погрешностей устройства для определения положения первого объекта во втором объекте и из-за возможного перемещения первого объекта и/или второго объекта, точка пересечения, в общем случае, не располагается на поверхности второго объекта. Поэтому точка пересечения перемещается на поверхность трехмерной модели второго объекта. Это позволяет определять область контакта и, таким образом, положение первого объекта во втором объекте с более высокой точностью, в то же время требуемая вычислительная стоимость все еще остается низкой.
Предпочтительно, чтобы устройство содержало блок визуализации для визуализации трехмерной модели по двухмерному проекционному изображению, причем блок визуализации выполнен с возможностью показа трехмерной модели, двухмерное проекционное изображение и определенное положение первого объекта одновременно. Также предпочтительно, чтобы блок визуализации был выполнен с возможностью визуализировать трехмерную модель и двухмерное проекционное изображение одновременно, в то время как проекционный блок формирует двухмерные проекционные изображения. Также предпочтительно, чтобы блок визуализации был выполнен с возможностью так, чтобы определенное положение первого объекта можно было визуализировать посредством графической индикации на трехмерной модели. Это позволяет показывать положение первого объекта во втором объекте таким образом, чтобы пользователь мог легко понять его. Также предпочтительно, чтобы при перемещении первого объекта в разные положения на поверхности второго объекта, можно было определить каждое из этих положений, указанных на трехмерной модели посредством графической индикации и зарегистрированных на трехмерной модели, такой что разные определенные положения, т.е. разные графические индикации, например, кресты или сферы, образуют путь, вдоль которого первый объект был перемещен по поверхности второго объекта. Если первым объектом является наконечник катетера для удаления, и если вторым объектом является сердце пациента, регистрируемые положения могут иллюстрировать, например, точки удаления на стенке сердца.
Также предпочтительно, чтобы блок визуализации содержал область получения изображения, для визуализации трехмерной модели по двухмерному проекционному изображению. Это позволяет иллюстрировать в области получения изображения, полную доступную информацию, т.е. двухмерное проекционное изображение, трехмерную модель второго объекта и, предпочтительно, положение первого объекта во втором объекте. Также предпочтительно, чтобы проекционный блок, например, система рентгеноскопии, содержал блок отображения, или чтобы блок визуализации содержал дополнительную область получения изображения для отображения или визуализации двухмерного проекционного изображения без возмущения трехмерной моделью.
Также предпочтительно, чтобы блок обеспечения был выполнен с возможностью обеспечивать движущуюся трехмерную модель второго объекта, чтобы устройство дополнительно содержало блок определения движения для обнаружения движения второго объекта во время формирования двухмерного проекционного изображения первого объекта и второго объекта проекционным блоком, чтобы блок регистрации был выполнен с возможностью регистрации движущейся трехмерной модели с помощью двухмерного проекционного изображения. Это позволяет точно определять положение первого объекта во втором объекте, даже если второй объект движется.
Согласно еще одному аспекту настоящего изобретения предоставлен способ определения положения первого объекта во втором объекте, причем первый объект контактирует со вторым объектом в области контакта, причем способ содержит этапы, на которых:
- обеспечивают трехмерную модель второго объекта,
- формируют двухмерное проекционное изображение первого объекта и второго объекта,
- регистрируют трехмерную модель с помощью двухмерного проекционного изображения,
- определяют положение, по меньшей мере, одной области контакта из положения первого объекта на двухмерном проекционном изображении и зарегистрированной трехмерной модели второго объекта, причем положение, по меньшей мере, одной области контакта является положением первого объекта во втором объекте, причем положение области контакта определяется определением положения, где линия прямой видимости первого объекта пересекает поверхность трехмерной модели.
Согласно еще одному аспекту изобретения, предоставлено устройство для подвода энергии ко второму объекту через поверхность второго объекта с использованием первого объекта, излучающего энергию, причем первый объект, излучающий энергию, контактирует с поверхностью второго объекта в области контакта, причем устройство для подвода энергии содержит устройство для определения положения первого объекта во втором объекте согласно изобретению. Устройство для подвода энергии является, например, устройством удаления для лечения сердца пациента удалением. В этом случае, первый объект является наконечником катетера для удаления, который контактирует с внутренней поверхностью сердца в ходе подвода энергии.
Согласно еще одному аспекту изобретения, предоставлена компьютерная программа для определения положения первого объекта во втором объекте, причем компьютерная программа содержит средство программного кода, чтобы заставить устройство по п. 1 выполнять этапы способа по п. 12, когда компьютерная программа выполняется на компьютере, управляющем устройством.
Следует понимать, что устройство по п. 1, способ по п. 12 и компьютерная программа по п. 13 имеют аналогичные и/или идентичные предпочтительные варианты осуществления, определенные в зависимых пунктах. Следует понимать, что предпочтительные варианты осуществления изобретения также могут определяться любой комбинацией зависимых пунктов.
Краткое описание чертежей
Эти и другие аспекты изобретения будут ясными из проиллюстрированых со ссылкой на варианты осуществления, описанных ниже.
На следующих чертежах:
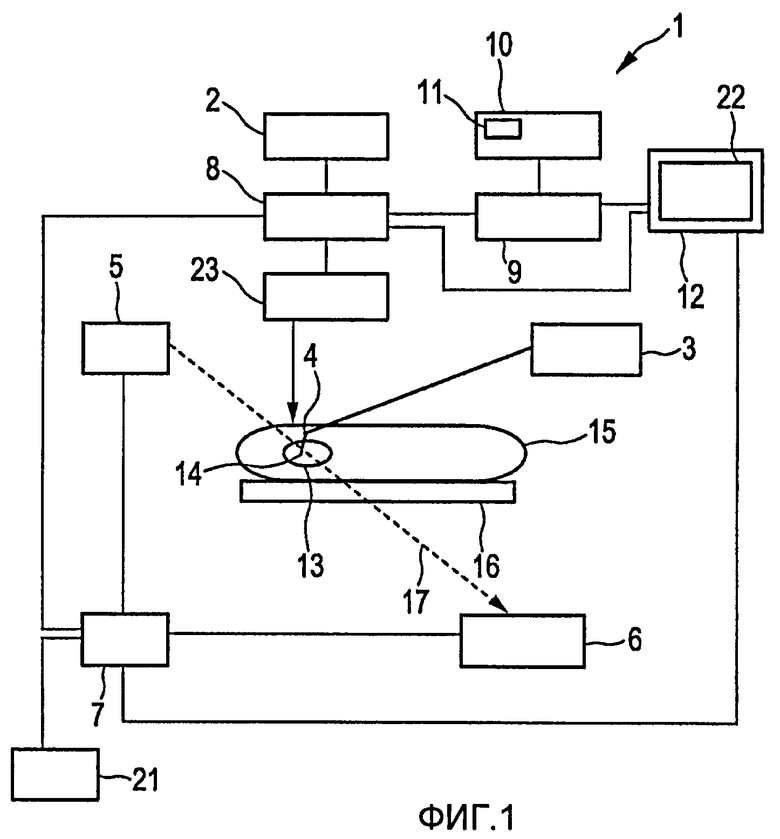
фиг. 1 показывает схематично вариант осуществления устройства для подвода энергии ко второму объекту через поверхность второго объекта с использованием первого объекта, излучающего энергию;
фиг. 2 показывает схематично формирование двухмерного проекционного изображения;
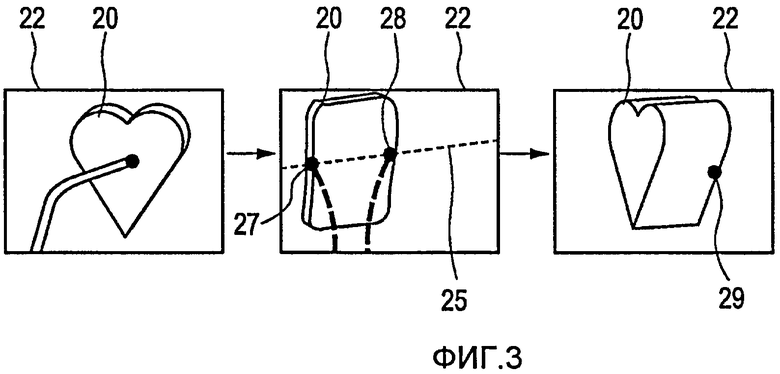
фиг. 3 показывает схематично области получения изображения блока визуализации, отображающего последовательно трехмерную модель второго объекта в разных ориентациях;
фиг. 4a показывает схематично формирование первого двухмерного проекционного изображения в первом проекционном направлении;
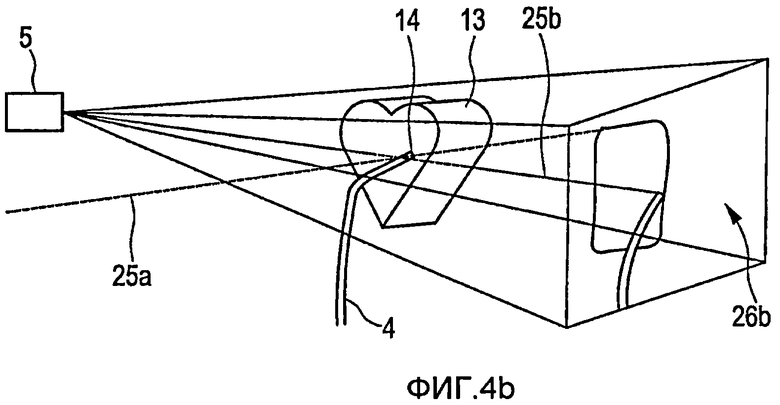
фиг. 4b показывает схематично формирование второго двухмерного проекционного изображения во втором проекционном направлении;
фиг. 5 показывает схематично области получения изображения, показывающие разные определенные положения на трехмерной модели второго объекта;
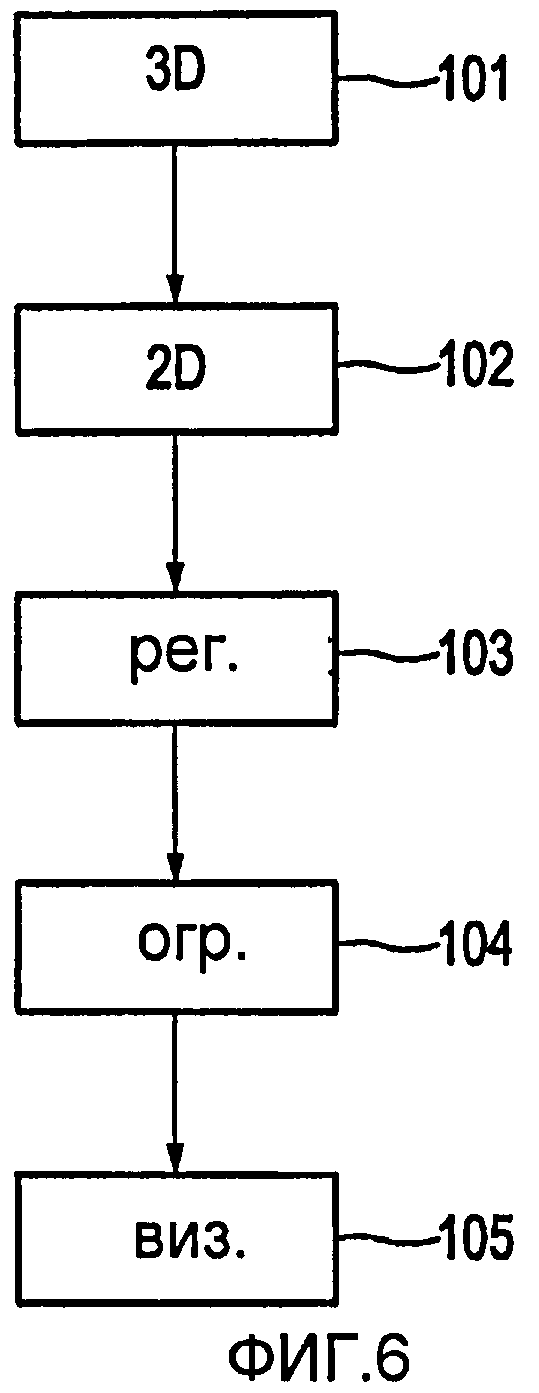
фиг. 6 показывает схематично блок-схему алгоритма, иллюстрирующая вариант осуществления способа для определения положения первого объекта во втором объекте.
Подробное описание вариантов осуществления
Фиг. 1 показывает устройство 1 для определения положения первого объекта 14 во втором объекте 13, причем первый объект 14 контактирует со вторым объектом 13 в области контакта. В этом варианте осуществления, первым объектом является наконечник 14 катетера 4, например, для удаления на внутренней стенке сердца 13, которое в этом варианте осуществления является вторым объектом, пациента 15. Пациент располагается на операционном столе 16. Таким образом, в этом варианте осуществления, устройство 1 способно определять положение наконечника 14 катетера на внутренней поверхности сердца 13. Катетер 4, предпочтительно, присоединен к блоку 3 удаления и восприятия. Комбинация наконечника 14 катетера, катетера 4 и блока 3 удаления и восприятия общеизвестна и поэтому не будет подробно описана.
Устройство 1 содержит рентгеновский источник 5 для излучения рентгеновских лучей 17, блок 6 обнаружения для обнаружения рентгеновских лучей 17, прошедших через второй объект 13, и блок 7 управления для управления рентгеновским источником 5 и блоком 6 обнаружения. Рентгеновский источник 5, блок 6 определения и блок 7 управления образуют проекционный блок, который в этом варианте осуществления является аппаратом рентгеноскопии. Проекционный блок 5, 6, 7 формирует двухмерные проекционные изображения первого объекта 14 и второго объекта 13 и передает эти двухмерные проекционные изображения на блок 8 регистрации. Блок 8 регистрации далее принимает трехмерную модель второго объекта 13 от блока 2 обеспечения. Блок 2 обеспечения может быть памятью, в которой хранится трехмерная модель второго объекта 13. Альтернативно или дополнительно, проекционный блок 2 может содержать блок формирования трехмерной модели для формирования трехмерной модели второго объекта 13. Блок формирования трехмерной модели может содержать блок формирования данных обнаружения, подобно, системе компьютерной томографии, магниторезонансной системе получения изображения, трехмерной вращательной рентгеновской системе или ультразвуковой системе получения изображения. Блок формирования трехмерной модели формирует трехмерное изображение второго объекта 13 с использованием данных обнаружения, полученных блоком формирования данных обнаружения, предпочтительно, заранее, т.е. до размещения первого объекта 14 во втором объекте 13. Предпочтительно, второй объект 13 сегментируется в трехмерном изображении, и сегментированный второй объект 13 визуализируется, например, путем поверхностной визуализации, в результате чего получается трехмерная модель второго объекта 13. Кроме того, согласно изобретению, можно использовать другие способы для формирования трехмерной модели второго объекта 13.
Блок регистрации выполнен с возможностью регистрации трехмерной модели второго объекта 13 с помощью двухмерного проекционного изображения, принятого от проекционного блока 5, 6, 7. Блок 8 регистрации выполняет регистрацию двухмерного проекционного изображения с трехмерной моделью второго объекта 13 с использованием признаков, которые могут располагаться как в двухмерном проекционном изображении, так и в трехмерной модели второго объекта 13. Для этой 2D-3D регистрации может быть использован, например, способ, описанный в Circulation 2005 112:3769-3776 или в Lancet 2003 362:1877-82.
2D-3D регистрация может, например, быть выполнена, с использованием двух двухмерных проекционных изображений, которые сформированы в разных проекционных направлениях. Трехмерную модель второго объекта 13 можно масштабировать, вращать и переносить средствами известных графических методик так, чтобы трехмерная модель была выровнена с одним из двухмерных проекционных изображений с использованием “опорных точек“ (признаков изображения, которые указывают определенные анатомические структуры, или которые видны и в двухмерном проекционном изображении и в трехмерной модели) или с использованием инъекции рентгеновского контрастного вещества для очерчивания формы, в этом варианте осуществления, рассматриваемой камеры сердца, или путем введения, в этом варианте осуществления, катетеров в известные места, или с использованием, в этом варианте осуществления, позвоночника или ребер, которые легко видеть и в двухмерном проекционном изображении и в трехмерной модели второго объекта 13. Теперь выравнивание верно в двух измерениях, которые являются измерениями двухмерного проекционного изображения. Выравнивание в измерении, перпендикулярном этим двум измерениями, первоначально не известно. Чтобы найти это третье измерение, проекционный блок поворачивается, предпочтительно, примерно на 90°, и соответственно поворачивается трехмерная модель. Второе из двух двухмерных проекционных изображений соответствует этому повернутому проекционному направлению, т.е. второе двухмерное проекционное изображение сформировано в этом повернутом проекционном направлении, и трехмерная модель также выровнена относительно этого второго двухмерного проекционного изображения. Таким образом, выравнивание между двухмерным проекционным изображением и трехмерной моделью может быть установлена во всех трех измерениях. Если проекционный блок поворачивается для получения нового проекционного направления, трехмерная модель, предпочтительно, автоматически поворачивается вместе с ним, поскольку проекционный блок автоматически передает свои параметры положения на блок 8 регистрации. Двухмерное проекционное изображение и зарегистрированная трехмерная модель второго объекта 13, предпочтительно, визуализируются на блоке 12 визуализации.
Устройство 1, предпочтительно, дополнительно содержит блок 23 обнаружения движения для обнаружения движения второго объекта во время формирования двухмерного проекционного изображения первого объекта 14 и второго объекта 13. Блок 23 обнаружения движения в этом варианте осуществления является электрокардиографом, который регистрирует движение сердца 13. В других вариантах осуществления, блок 23 определения движения может быть программным обеспечением для обработки изображений, который анализирует движение второго объекта 13 для рентгеноскопии в реальном времени (с малым временем ожидания), или ультразвуковой системой получения изображения в реальном времени с той же целью. Кроме того, предпочтительно, обеспечиваемая трехмерная модель второго объекта 13 является движущейся трехмерной моделью, которая может, например, быть сформирована блоком формирования трехмерной модели, содержащим блок формирования данных обнаружения, блок реконструкции изображения, блок сегментации и блок поверхностной визуализации, причем во время обнаружения сигналов обнаружения для реконструкции изображения второго объекта 13 движение второго объекта 13 обнаруживается блоком 23 обнаружения движения. Если движущаяся трехмерная модель обеспечена, и если движение второго объекта 13 обнаружено во время формирования двухмерных проекционных изображений, блок 8 регистрации выполнен с возможностью регистрации движущейся трехмерной модели с помощью двухмерного проекционного изображения также в отношении перемещения второго объекта 13.
Блок 12 визуализации содержит область 22 получения изображения. В области 22 получения изображения, предпочтительно, отображается трехмерная модель 20 второго объекта 13 совместно с зарегистрированным двухмерным проекционным изображением. Кроме того, проекционный блок содержит блок 21 отображения для отображения двухмерного проекционного изображения.
Устройство 1 дополнительно содержит блок 9 определения для определения области контакта между первым объектом 14 и вторым объектом 13, причем область контакта является положением первого объекта 14 во втором объекте 13.
Теперь опишем вариант осуществления определения области контакта со ссылкой на фиг. 2. Фиг. 2 показывает рентгеновский источник 5, который испускает рентгеновское излучение 17, которое проходит через первый объект 14 и второй объект 13 и формирует проекционное изображение 26 первого объекта 14 и второго объекта 13. Блок 9 определения определяет линию прямой видимости 25, которая соединяет первый объект, т.е. наконечник катетера в этом варианте осуществления, в двухмерных проекционных изображениях 26 с рентгеновским источником 5, т.е. в области, где испускаются лучи. Блок 9 определения передает эту линию прямой видимости 25 на блок 12 визуализации, и, в области 22 получения изображения блока 12 визуализации, трехмерная модель второго объекта 13 и линия прямой видимости 25 отображаются после поворота трехмерной модели 20 совместно с линией наблюдения 25, чтобы можно было позволить наблюдение линии прямой видимости 25, пересекающую трехмерную модель 20 при виде сбоку. Блок 9 определения далее определяет точки 27, 28 пересечения линии прямой видимости 25 с трехмерной модели 20. Точки 27, 28 пересечения также отображаются в области 22 получения изображения. Фиг. 3 показывает левую часть области 22 получения изображения, отображающая трехмерную модель 20 и зарегистрированное двухмерное проекционное изображение 26 до поворота трехмерной модели 20. Средняя часть фиг. 3 показывает область 22 получения изображения, отображающую повернутую трехмерную модель 20, повернутую линию прямой видимости 25, две определенные точки 27, 28 пересечения и два воображаемых катетера и наконечника катетера. Устройство 1 для определения положения первого объекта во втором объекте дополнительно содержит блок 10 выбора для выбора, какая из двух точек 27, 28 пересечения линии прямой видимости 25 с трехмерной моделью 20 соответствует положению области контакта. Блок выбора предпочтительно содержит блок 11 ввода, подобно, мыши или клавиатуре, который позволяет пользователю вводить сигналы в блок 10 выбора для выбора одной из точек 27, 28 пересечения в качестве области контакта. Таким образом, точка пересечения, выбранная пользователем, рассматривается как область контакта и, поэтому трехмерное положение первого объекта 14 во втором объекте 13, т.е. в этом варианте осуществления, положение наконечника 14 катетера на внутренней стенке сердца 13. Это определенное трехмерное положение 29 первого объекта 14 во втором объекте 13 отображается совместно с трехмерной моделью 20 в области 22 получения изображения (правая часть фиг. 3).
В другом варианте осуществления, блок 9 определения может быть выполнен с возможностью так, чтобы область контакта можно было определить, как описано ниже со ссылкой на фиг. 4a и 4b. Согласно фиг. 4a, первое двухмерное проекционное изображение 26a формируется относительно первого проекционного направления, и блок 9 определения определяет первую линию наблюдения 25a. Согласно фиг. 4b, проекционный блок поворачивается, например, на угол 90°, формируется второе двухмерное проекционное изображение 26b, и блок 9 определения определяет вторую линию прямой видимости 25b. Для того чтобы проекционный блок мог вращаться, предпочтительно установить проекционный блок на C-образном рычаге. Блок 9 определения определяет точку пересечения первой линии прямой видимости 25a и второй линии прямой видимости 25b и перемещает эту точка пересечения на поверхность трехмерной модели 20 второго объекта 13, с которым контактирует первый объект 14. Точка пересечения не располагается на поверхности трехмерной модели 20 второго объекта 13, из-за погрешности измерений, неточного выравнивания и возможного движения второго объекта 13. Таким образом, только после перемещения на поверхность трехмерной модели 20 второго объекта 13 перемещенная определенная точка пересечения двух линий прямой видимости 25a, 25b располагается на поверхности трехмерной модели 20. Эта перемещенная точка пересечения соответствует положению области контакта первого объекта 14 и второго объекта 13 и, следовательно, положению первого объекта 14 во втором объекте 13, т.е. положение перемещенной точки пересечения является определенным трехмерным положением первого объекта 14 во втором объекте 13. Трехмерная модель 20 второго объекта 13 может отображаться в области 22 получения изображения совместно с определенным трехмерным положением первого объекта 14. Перемещение на поверхность трехмерной модели предпочтительно выполняется по кратчайшему расстоянию между определенной точкой пересечения и поверхностью трехмерной модели.
Как было отмечено выше, в этом варианте осуществления первым объектом 14 является наконечник катетера, и вторым объектом 13 является сердце пациента. Наконечник 14 катетера может последовательно контактировать с внутренней стенкой сердца 13 в разных контактных областях, например, для денатурирования ткани сердца в разных областях контакта для процедуры удаления. Устройство 1 может быть выполнено с возможностью так, чтобы можно было определить каждое положение этих областей контакта, т.е., в этом варианте осуществления, каждое трехмерное положение наконечника 14 катетера на внутренней стенке сердца 13, и чтобы каждое из определенных трехмерных положений можно было пометить, например, крестом или сферой на трехмерной модели 20 сердца. Фиг. 5 показывает эти кресты 18 в области 22 получения изображения совместно с трехмерной моделью 20, катетером 4 и наконечником 14 катетера. Фиг. 5 также схематически показывает просвет 19 легочной вены, окруженный определенными положениями 18, которые, в этом варианте осуществления, соответствуют точкам удаления.
Если проекционный блок является блоком рентгеноскопии, определение трехмерного положения первого объекта во втором объекте может быть выполнено так, чтобы суммарная кожная доза, обеспечиваемая рентгенографией, оставалась значительно ниже любого порогового значения для детерминистических эффектов радиации, т.е. значительно ниже 2 Гр.
Для определения линии прямой видимости, нужно определить положение первого объекта в двухмерном проекционном изображении. Это определение может быть выполнено автоматически, например, путем сравнения с пороговым значением или распознавания шаблона с использованием обработки изображений. Если, в этом варианте осуществления, первый объект 14 является наконечник катетера, содержащий металл, положение наконечника 14 катетера в двухмерном проекционном изображении может быть легко определено путем сравнения с пороговым значением. Кроме того, в целях коррекции или альтернативно, пользователь может вводить положение в двухмерном проекционном изображении, причем для дальнейшего определения соответствующей линии прямой видимости, это введенное положение рассматривается как положение первого объекта 14 в двухмерном проекционном изображении.
Блок 12 визуализации, предпочтительно, выполнен с возможностью так, чтобы трехмерная модель 20 второго объекта 13 была показана в так называемой “обратной перспективе”, которая показывает трехмерную модель 20, как если бы она проецировалась той же самой формой рентгеновского пучка, которая, предпочтительно, является конической, которая в действительности создает двухмерное проекционное изображение из второго объекта 13.
Перейдем к описанию способа для определения положения первого объекта во втором объекте согласно изобретению со ссылкой на блок-схему алгоритма, показанную на фиг. 6.
На этапе 101 обеспечивается трехмерная модель 20 второго объекта 13. Кроме того, на этапе 102 формируется двухмерное проекционное изображение первого объекта 14 и второго объекта 13. На этапе 103 регистрируется трехмерная модель 20 второго объекта 13 с помощью двухмерного проекционного изображения. На этапе 104 блок определения определяет область контакта между первым объектом 14 и вторым объектом 13 как трехмерное положение первого объекта 14 во втором объекте 13. Трехмерная модель 20 совместно с определенным трехмерным положением первого объекта 14 во втором объекте 13 отображается на блоке 12 визуализации на этапе 105.
Вышеупомянутые варианты осуществления описывают первый объект, который контактирует со вторым объектом только в одной области контакта каждый раз. Однако изобретение не ограничивается такой расстановкой. Например, первый объект может содержать несколько частей, которые контактируют со вторым объектом одновременно. Например, если первым объектом является катетер для удаления, и если вторым объектом является сердце пациента, катетер для удаления может содержать несколько электродов или других площадок катетера, которые могут контактировать с внутренней стенкой сердца одновременно, причем устройство для определения положения первого объекта во втором объекте выполнено с возможностью так, чтобы для каждой из этих частей катетера для удаления можно было определить трехмерное положение на внутренней стенке сердца.
Хотя изобретение было, в основном, описано со ссылкой на сердце пациента как второй объект, изобретение не ограничивается определением положения в сердце пациента. Например, вторым объектом также может быть технический объект, например, трубопровод, в котором, например, энергия должна подводиться к внутренним частям технического объекта в целях обслуживания, причем элемент, излучающий энергию, используется в техническом объекте для подвода энергии, и причем положение элемента, излучающего энергию, в техническом объекте подлежит определению.
В вышеописанных вариантах осуществления, блок визуализации содержит одну область получения изображения. Однако изобретение не ограничивается только одной областью получения изображения блока визуализации. Например, блок визуализации также может содержать более двух областей получения изображения. Кроме того, согласно изобретению, в других вариантах осуществления, область получения изображения или каждая область получения изображения может отображать двухмерное проекционное изображение и/или трехмерную модель второго объекта и/или определенное положение первого объекта во втором объекте.
Трехмерная модель также может быть обеспечена из формирования двухмерных проекционных изображений, например, путем определения изображений второго объекта во время формирования двухмерных проекционных изображений с других направлений.
Некоторые или все из вышеописанных блоков могут быть реализованы одним или несколькими блоками. Кроме того, блоки, выполняющие вычисления и/или определения, подобно блоку определения, блоку регистрации или блоку реконструкции, могут быть средствами программного кода, которые выполняют соответствующие функции и которые могут приводиться в действие на компьютерной системе, или специальное оборудование, которое выполняет соответствующие функции.
Устройство 1 для определения положения первого объекта во втором объекте совместно с наконечником 14 катетера, катетером 4 и блоком 3 удаления и восприятия может быть рассмотрено как устройство для подвода энергии ко второму объекту через поверхность второго объекта с использованием первого объекта, излучающего энергию, согласно изобретению, причем первым объектом, излучающим энергию, является наконечник катетера, который может быть электродом для подвода энергии ко второму объекту через поверхность второго объекта, например, внутренней стенки сердца пациента.
Хотя в вышеописанном варианте осуществления, положение наконечника 14 катетера, который присоединен к блоку 3 удаления и восприятия через катетер 4, определено во втором объекте 13, устройство для определения положения первого объекта во втором объекте также может быть использован для определения положения одного или нескольких других произвольно выбранных первых объектов, которые расположены на поверхности произвольно выбранного второго объекта.
Специалисты в данной области техники могут понять и осуществить другие разновидности раскрытых вариантов осуществления и практически использовать заявленное изобретение на основании изучения чертежей и прилагаемой формулы изобретения.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и в вышеприведенном описании, такие иллюстрацию и описание следует рассматривать в порядке иллюстрации или примера, но не ограничения. Изобретение не ограничивается раскрытыми вариантами осуществления.
В формуле изобретения слово “содержащий” не исключает другие элементы или этапы, и неопределенный артикль “а” или “an” не исключает их множество. Например, в пункте 1 для определения положения области контакта также может быть использовано два или более двухмерных проекционных изображения.
Компьютерная программа может быть сохранена/распространена на подходящем носителе, например, оптическом носителе или полупроводниковом носителе, поставляемом совместно с или в составе другого оборудования, но также может быть распространена в других формах, таких как интернет или в других системах проводной или беспроводной связи.
Никакие условные обозначения в формуле изобретения не следует рассматривать в порядке ограничения объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| РЕГИСТРАЦИЯ ДВУМЕРНЫХ/ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ПРИЗНАКОВ | 2008 |
|
RU2568635C2 |
| ВИЗУАЛИЗАЦИЯ ДЛЯ НАВИГАЦИОННОГО УКАЗАНИЯ | 2012 |
|
RU2594811C2 |
| ОПРЕДЕЛЕНИЕ КОНКРЕТНОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2011 |
|
RU2574374C2 |
| АВТОМАТИЧЕСКАЯ ИДЕНТИФИКАЦИЯ АНАТОМИЧЕСКОЙ ЧАСТИ | 2011 |
|
RU2569532C2 |
| ЭНЕРГОПОДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ ЭНЕРГИИ К ОБЪЕКТУ | 2011 |
|
RU2572748C2 |
| ИМИТИРОВАННЫЙ ПРОСТРАНСТВЕННЫЙ ПРОСМОТР ОБЪЕКТА В РЕАЛЬНОМ ВРЕМЕНИ С РАЗЛИЧНЫХ ТОЧЕК НАБЛЮДЕНИЯ | 2013 |
|
RU2656245C2 |
| УСТРОЙСТВО И СПОСОБ ЛОКАЛИЗАЦИИ ПРЕДСТАВЛЯЮЩЕГО ИНТЕРЕС ОБЪЕКТА У СУБЪЕКТА | 2009 |
|
RU2520369C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2620869C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СВОЙСТВ ДЛЯ ОПРЕДЕЛЕНИЯ СВОЙСТВА ОБЪЕКТА | 2011 |
|
RU2567268C2 |



Группа изобретений относится к устройству и способу для определения положения первого объекта во втором объекте, к устройству для подвода энергии ко второму объекту через поверхность второго объекта с использованием излучающего энергию первого объекта и к читаемому компьютером носителю с компьютерной программой для определения положения первого объекта во втором объекте. Способ реализуется устройством и содержит этапы, на которых обеспечивают трехмерную модель второго объекта, формируют двухмерное проекционное изображение первого и второго объектов, регистрируют трехмерную модель с помощью двухмерного проекционного изображения, определяют положение, по меньшей мере, одной области контакта из положения первого объекта на двухмерном проекционном изображении и зарегистрированной трехмерной модели второго объекта, причем положение, по меньшей мере, одной области контакта является положением первого объекта во втором объекте и определяется определением положения, где линия прямой видимости первого объекта пересекает поверхность трехмерной модели. Устройство для подвода энергии содержит упомянутое устройство для определения положения первого объекта во втором объекте. Применение группы изобретений позволит определить положение первого объекта во втором объекте. 4 н. и 9 з.п. ф-лы, 6 ил.
1. Устройство для определения положения первого объекта (14) во втором объекте (13), причем первый объект (14) контактирует со вторым объектом (13) в области контакта, устройство содержащее:
- блок (2) обеспечения для обеспечения трехмерной модели (20) второго объекта (13),
- проекционный блок (5, 6, 7, 21) для формирования двухмерного проекционного изображения (26) первого объекта (14) и второго объекта (13),
- блок (8) регистрации для регистрации трехмерной модели (20) с помощью двухмерного проекционного изображения (26),
- блок (9) определения для определения положения области контакта из положения первого объекта (14) на двухмерном проекционном изображении (26) и зарегистрированной трехмерной модели (20) второго объекта (13), причем положение области контакта является положением первого объекта (14) во втором объекте (13),
при этом блок (9) определения выполнен так, чтобы положение области контакта определялось определением положения, где линия прямой видимости (25) первого объекта (14) пересекает поверхность трехмерной модели (20).
2. Устройство по п.1, в котором проекционный блок (5, 6, 7, 21) выполнен с возможностью формировать двухмерные проекционные изображения (26) в разных проекционных направлениях и в котором блок (8) регистрации выполнен с возможностью регистрировать трехмерную модель (20) с помощью разных двухмерных проекционных изображений (26) такими что в каждом из разных проекционных направлений трехмерная модель (20) регистрируется с помощью соответствующего двухмерного проекционного изображения (26).
3. Устройство по п.1, в котором устройство (1) дополнительно содержит блок (10) выбора для выбора, какая из двух или более точек (27, 28) пересечения линии прямой видимости (25) с трехмерной моделью (20) соответствует положению области контакта.
4. Устройство по п.3, в котором устройство содержит блок (12) визуализации для визуализации трехмерной модели (20), линии прямой видимости (25) и двух или более точек (27, 28) пересечения при виде сбоку, и в котором блок (10) выбора содержит блок (11) ввода, позволяющий пользователю выбирать одну из точек (27, 28) пересечения в качестве положения области контакта.
5. Устройство по п.3, в котором проекционный блок (5, 6, 7, 21) выполнен с возможностью формировать, по меньшей мере, два двухмерных проекционных изображения первого объекта (14) и второго объекта (13) в, по меньшей мере, двух проекционных направлениях, причем блок (9) определения выполнен с возможностью определять положение области контакта, где линия прямой видимости первого объекта (14) относительно проекционного направления одного из двухмерных проекционных изображений пересекает трехмерную модель (20), причем блок выбора выполнен с возможностью выбирать, какая из двух или более точек пересечения линии прямой видимости с трехмерной моделью (20) соответствует положению области контакта, с использованием, по меньшей мере, одного из других двухмерных проекционных изображений.
6. Устройство по п.1, в котором проекционный блок (5, 6, 7, 21) выполнен с возможностью формировать, по меньшей мере, два двухмерных проекционных изображения (26а, 26b) первого объекта (14) и второго объекта (13) в, по меньшей мере, двух проекционных направлениях, причем блок (9) определения выполнен с возможностью определять, по меньшей мере, две линии прямой видимости (25а, 25b) первого объекта (14) для, по меньшей мере, двух проекционных направлений, причем блок (9) определения дополнительно выполнен с возможностью определять точку пересечения, по меньшей мере, двух линий прямой видимости (25а, 25b), причем блок (9) определения дополнительно выполнен с возможностью перемещать точку пересечения на поверхность трехмерной модели (20), причем перемещенная точка пересечения является определенным положением области контакта.
7. Устройство по п.1, в котором устройство содержит блок (12) визуализации для визуализации трехмерной модели (20) по двухмерному проекционному изображению (26), причем блок (12) визуализации выполнен с возможностью показывать трехмерную модель (20), двухмерное проекционное изображение (26) и определенное положение первого объекта (14) одновременно.
8. Устройство по п.7, в котором блок (12) визуализации выполнен так, чтобы определенное положение первого объекта (14) визуализировалось графической индикацией на трехмерной модели (20).
9. Устройство по п.7, в котором блок (12) визуализации содержит область
(22) получения изображения для визуализации трехмерной модели (20) по двухмерному проекционному изображению (26).
10. Устройство по п.1, в котором блок (2) обеспечения выполнен с возможностью обеспечивать движущуюся трехмерную модель (20) второго объекта (13), причем устройство дополнительно содержит блок (23) определения движения для обнаружения движения второго объекта (13) во время формирования двухмерного проекционного изображения (26) первого объекта (14) и второго объекта (13) проекционным блоком (5, 6, 7, 21), причем блок (8) регистрации выполнен с возможностью регистрировать движущуюся трехмерную модель (20) с помощью двухмерного проекционного изображения (26).
11. Устройство для подвода энергии ко второму объекту (13) через поверхность второго объекта (13) с использованием первого объекта (14), излучающего энергию, причем первый объект (14) излучающий энергию, контактирует с поверхностью второго объекта (13) в области контакта, содержащее устройство для определения положения первого объекта (14) во втором объекте (13) по п.1.
12. Способ определения положения первого объекта (14) во втором объекте (13), причем первый объект (14) контактирует со вторым объектом
(13) в области контакта, способ содержит этапы, на которых
- обеспечивают трехмерную модель (20) второго объекта (13),
- формируют двухмерное проекционное изображение (26) первого объекта
(14) и второго объекта (13),
- регистрируют трехмерную модель (20) с помощью двухмерного проекционного изображения (26),
- определяют положение, по меньшей мере, одной области контакта из положения первого объекта (14) на двухмерном проекционном изображении (26) и зарегистрированной трехмерной модели (20) второго объекта (13), причем положение, по меньшей мере, одной области контакта является положением первого объекта (14) во втором объекте (13), причем положение области контакта определяется определением положения, где линия прямой видимости (25) первого объекта (14) пересекает поверхность трехмерной модели (20).
13. Читаемый компьютером носитель, содержащий компьютерную программу для определения положения первого объекта (14) во втором объекте (13), содержащую средство программного кода, для побуждения устройства по п.1 выполнять этапы способа по п.12, когда компьютерная программа выполняется на компьютере, управляющем устройством.
| US 2006241413 A1, 26.10.2006 | |||
| УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОЙ ХОЛОДОВОЙ РАДИОЧАСТОТНОЙ АБЛЯЦИИ ПРИ ОПЕРАЦИИ НА ОТКРЫТОМ СЕРДЦЕ | 2001 |
|
RU2197917C1 |
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА МИОКАРД С ПОМОЩЬЮ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1997 |
|
RU2170066C2 |
| Способ переработки нитрозных газов | 1940 |
|
SU72264A1 |
| WO 2005020148 A1, 03.03.2005 | |||
| Способ преобразования тепловой энергии в электрическую энергию | 1958 |
|
SU120552A2 |
| US 5156151 A, 20.10.1992 | |||
| ЛИНДЕНБРАТЕН Л.Д | |||
| И Др | |||
| Медицинская радиология | |||
| - М.: Медицина, 2000, с.71-143 | |||
| ГАБУНИЯ Р.И | |||
| И Др | |||
| Компьютерная томография в клинической диагностике | |||
| - М.: Медицина, 1995. | |||

