Изобретение относится к сферическим манипуляторам параллельной структуры и предназначено для манипуляций заготовками, изделиями и рабочим органом в автоматических линиях, испытательных стендах, обрабатывающих центрах с помощью различных инструментов, а также в сборочных операциях, в медицине (хирургии) и других технологических операциях, где требуется точное сохранение горизонтального положения выходной платформы и вертикальное ориентирование установленного рабочего органа.
Известно устройство пространственного сферического манипулятора параллельной структуры, содержащее основание и выходную подвижную платформу, соединенные подвижно между собой тремя кинематическими цепями с приводными вращательными парами, расположенными перпендикулярно осям приводных двигателей (книга С. Кун, К. Госселин «Структурный синтез параллельных механизмов» - М.: Физматлит, 2012, схема на вкладке стр. 80, рис. 1 (е)) - аналог.
Недостатками известного устройства является сложность и большие габариты конструкции, а также ограниченное рабочее пространство и сложная система управления всеми двигателями.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является сферический манипулятор, содержащий подвижное замкнутое кинематическое соединение платформ и приводных одноподвижных кинематических пар, выполненное в виде пространственного механизма с тремя степенями свободы, в котором оси кинематический пар пересекаются между собой, а оси приводов расположены под углом к осям декартовой системы координат прототип (патент RU 2465124 C1, B25J 1/00, 2012).
Недостатками указанного сферического манипулятора являются ограниченное рабочее пространство и узкая область его применения из-за углового перекоса выходной платформы, сложность конструкции и большие габариты пространственной конструкции в нерабочем положении при ее складировании и транспортировке, а также сложная система управления всеми приводными двигателями.
В основу изобретения положена техническая задача, заключающаяся в увеличении рабочей области сферического манипулятора при сохранении гарантированного горизонтального положения выходной подвижной платформы, а также упрощение конструкции, сборки и управления пространственным манипулятором в сочетании с его малыми габаритами в нерабочем положении.
Получение технического результата достигается за счет того, что подвижное замкнутое кинематическое соединение платформ и приводных одноподвижных вращательных пар выполнено в виде набора последовательно установленных по вертикали в параллельных горизонтальных плоскостях опорной платформы и четырех подвижных платформ, которые попарно соединены между собой посредством цилиндрических шарниров с параллельными осями вращения и параллельно установленных между собой поворотных рычагов одинаковой длины
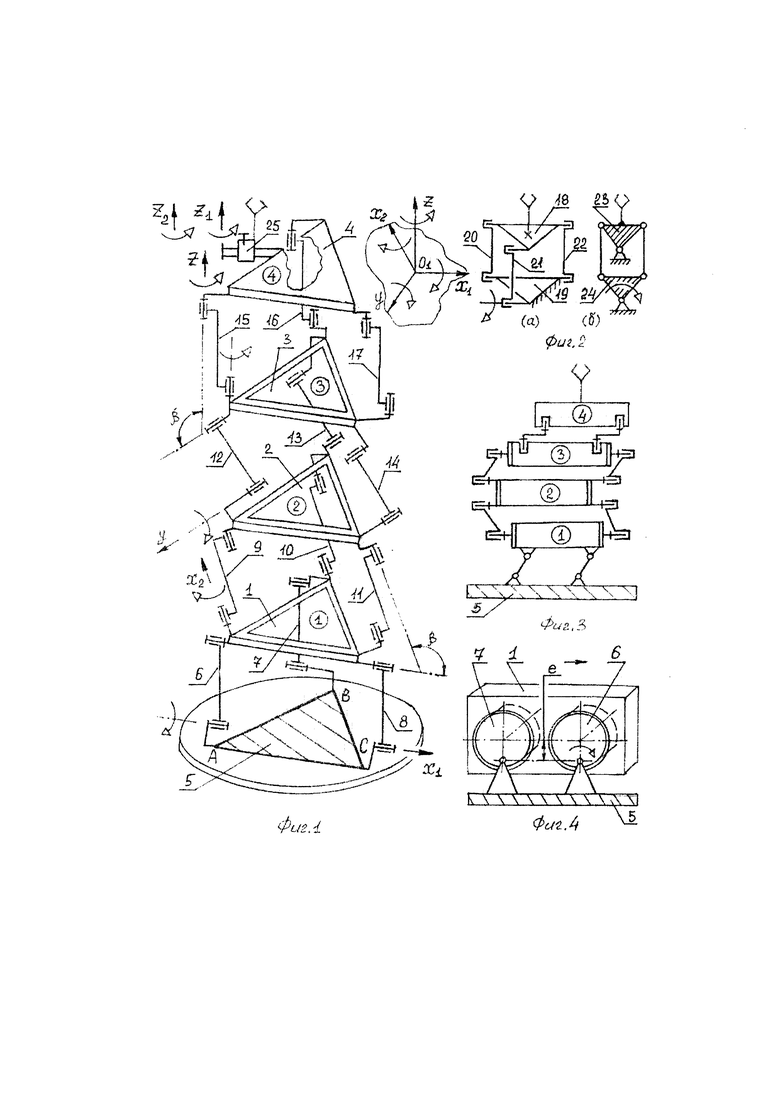
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен предлагаемый сферический V-манипулятор в исходном положении. На фиг. 2 представлен сборочный блочный модуль V-манипулятора. На фиг. 3 представлена конструкция складывающегося/раскладывающегося сферического V-манипулятора (на основе параллельного сдвига между собой подвижных платформ в горизонтальной плоскости без разборки всего манипулятора). На фиг. 4 показан вариант выполнения поворотных рычагов подвижной платформы в виде одинаковых круглых цилиндрических эксцентриков с параллельными осями вращения.
Предлагаемый на фиг.1, 2, 3 и 4 сферический V-манипулятор содержит подвижное замкнутое кинематическое соединение платформ и приводных одноподвижных вращательных пар, которое выполнено в виде набора последовательно установленных по вертикали в параллельных горизонтальных плоскостях четырех подвижных платформ 1,2, 3 и 4 и опорной платформы 5, которые попарно соединены между собой посредством поворотных рычагов одинаковой длины 6, 7 и 8 (расположенных между платформами 5 и 1), поворотных рычагов 9, 10 и 11 (расположенных между платформами 2 и 3) и поворотных рычагов 15, 16 и 17 (расположенных между платформами 3 и 4). Поворотные рычаги, расположенные между смежными платформами, параллельно установлены между собой и образуют с соединяемыми платформами цилиндрические шарниры в виде вращательных кинематических пар с параллельными между собой осями вращения, которые для поворотных рычагов 6, 7 и 8; 10 и 11; 12, 13 и 14 -расположены в горизонтальной плоскости, а для поворотных рычагов 15, 16 и 17, присоединенных к выходной подвижной платформе 4 - расположены в вертикальной плоскости.
На фиг. 1 горизонтальная подвижная выходная платформа 4 в системе координат вида «х1-х2-у-z» имеет раздельное плоскопараллельное движение вокруг каждой из четырех пересекающихся общей точке О, осей x1, x2, y, z. Предлагаемое устройство сферического V-манипулятора выполнено следующим образом:
1. Ось приводной вращательной кинематической пары подвижной платформы 1 расположена вдоль оси координат х1.
2. Ось приводной вращательной кинематической пары подвижной платформы 2 расположена вдоль оси координат х2.
3. Ось приводной вращательной кинематической пары подвижной платформы 3 расположена вдоль оси координат у.
4. Ось приводной вращательной кинематической пары выходной подвижной платформы 4 расположена вдоль оси координат z.
Установленные между платформами 1, 2, 3, 4 и 5 поворотные рычаги могут быть выполнены в виде параллельно установленных между собой двухшарнирных звеньев с одинаковым расстоянием между отверстиями цилиндрических шарниров или в виде круглых цилиндрических приводных эксцентриков одинакового диаметра и с одинаковым эксцентриситетом «е» (фиг. 4), шарнирно установленных внутри подвижной платформы с параллельными между собой осями вращения.
На фиг. 1 представлена пространственная конструкция сферического V-манипулятора, составленная из блочных модулей, содержащих подвижную платформу с шарнирно присоединенными к ней поворотных рычагов, при этом VIP-манипулятор выполнен в виде последовательно собираемых по вертикали смежных модулей с угловым разворотом их между собой на угол β, равный 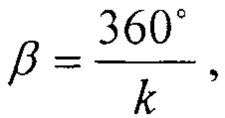 где k - число поворотных рычагов, установленных по периметру подвижной платформы. Например, для случая k=3 (показанного на фиг. 1) угол β=360/3=120°.
где k - число поворотных рычагов, установленных по периметру подвижной платформы. Например, для случая k=3 (показанного на фиг. 1) угол β=360/3=120°.
Блочный модуль для сборки V-манипулятора может быть выполнен в виде:
1. Представленного на фиг. 2(а) пространственного пятизвенного параллелограммного механизма, состоящего из двух одинаковых треугольных платформ 18 и 19 и трех одинаковых двухшарнирных звеньев 20, 21 и 22, параллельно установленных между собой и подвижно соединенных в замкнутую кинематическую цепь посредством цилиндрических шарниров с параллельными осями вращения, расположенных в плоскости треугольных платформ 18 и 19.
2. Представленного на фиг. 2(б) плоского пятизвенного параллелограммного механизма, состоящего из двух одинаковых треугольных платформ и соединяющих их трех одинаковых двухшарнирных звеньев, параллельно установленных между собой и подвижно соединенных в замкнутую кинематическую цепь посредством цилиндрических шарниров с параллельными осями вращения, расположенных перпендикулярно плоскости треугольных платформ 23 и 34.
На фиг. 3 представлена компактная конструкции сферического V-манипулятора (в нерабочем состоянии), которая имеет небольшие габариты за счет простого и быстрого сдвига в горизонтальной плоскости всех платформ параллельно друг другу за счет полного разворота всех поворотных рычагов и без демонтажа отдельных узлов V-манипулятора. Обратный разворот поворотных рычагов в другую сторону обеспечивает быстрое превращение V-манипулятора из складывающейся плоской конфигурации (фиг. 3) в требуемый пространственный механизм (фиг. 1).
Подвижная выходная платформа 4 соединена с ползуном рабочего органа 25, установленного на ней с возможностью относительного перемещения и последующей фиксации для обеспечения плоскопараллельного вращения рабочего органа 25 вокруг разных параллельных осей z1 и z2, расположенных вертикально. С учетом перемещения ползуна 25 относительно выходной платформы 4, представленный на фиг. 1 пространственный сферический VIP-манипулятор будет иметь пять степеней свободы с полной кинематической развязкой всех пяти независимых плоскопараллельных вращений (вокруг осей х1, x2, y, z, z1) при гарантированном точном сохранении во всем рабочем пространстве горизонтального расположения выходной платформы 4 с рабочим органом 25.
Работа представленного сферического V-манипулятора заключается в следующем. При раздельном повороте приводных кинематических пар вокруг осей х1, х2, у, z и перемещении ползуна с рабочим органом 25 относительно выходной платформы 4 происходит раздельное плоскопараллельное движение выходной платформы 4 вокруг соответствующих 5 осей (х1, х2, у, z, z1), что упрощает управление сферическим VIP-манипулятором и расширяет его рабочее пространство за счет реализации 5 степеней свободы, а также расширяет область его применения в технологических установках и медицине, где требуется строго горизонтальное положение платформы и вертикальное расположение при ориентации рабочего органа.
Достигаемый в предлагаемом сферическом V-манипуляторе положительный эффект заключается в следующем:
1. Расширение рабочего пространства сферического манипулятора за счет реализации 5 степеней свободы и упрощение управления на основе полной кинематической развязки его отдельных вращений.
2. Упрощение конструкции и снижение стоимости сферического манипулятора за счет его сборки из простых двухшарнирных звеньев с параллельными осями.
3. Расширение областей применения в технике с вертикальным рабочим органом.
4. Малые габариты сферического V-манипулятора в нерабочем положении при его складировании и транспортировке за счет параллельного сдвига между собой всех платформ в горизонтальной плоскости без их разборки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| СФЕРИЧЕСКИЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР-ТРИПОД | 2024 |
|
RU2839627C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
Изобретение относится к сферическим манипуляторам параллельной структуры. Манипулятор содержит подвижное замкнутое кинематическое соединение платформы и приводных одноподвижных вращательных пар, выполненное в виде набора последовательно установленных по вертикали в параллельных горизонтальных плоскостях опорной платформы и четырех подвижных платформ. Платформы попарно соединены между собой посредством цилиндрических шарниров с параллельными осями вращения и параллельно установленных между собой поворотных рычагов одинаковой длины. В результате обеспечивается расширение рабочего пространства манипулятора за счет пяти степеней свободы плоскопараллельного движения выходной платформы вокруг пересекающихся и параллельных осей вращения с полной кинематической развязкой всех парциальных движений. Упрощаются управление манипулятором и его конструкция за счет блочной сборки из простых двухшарнирных рычагов одинаковой длины со всеми параллельными осями, уменьшаются габариты манипулятора при складировании и транспортировке за счет простого параллельного сдвига между собой всех платформ в горизонтальной плоскости без разборки и сборки всей конструкции. 5 з.п. ф-лы, 4 ил.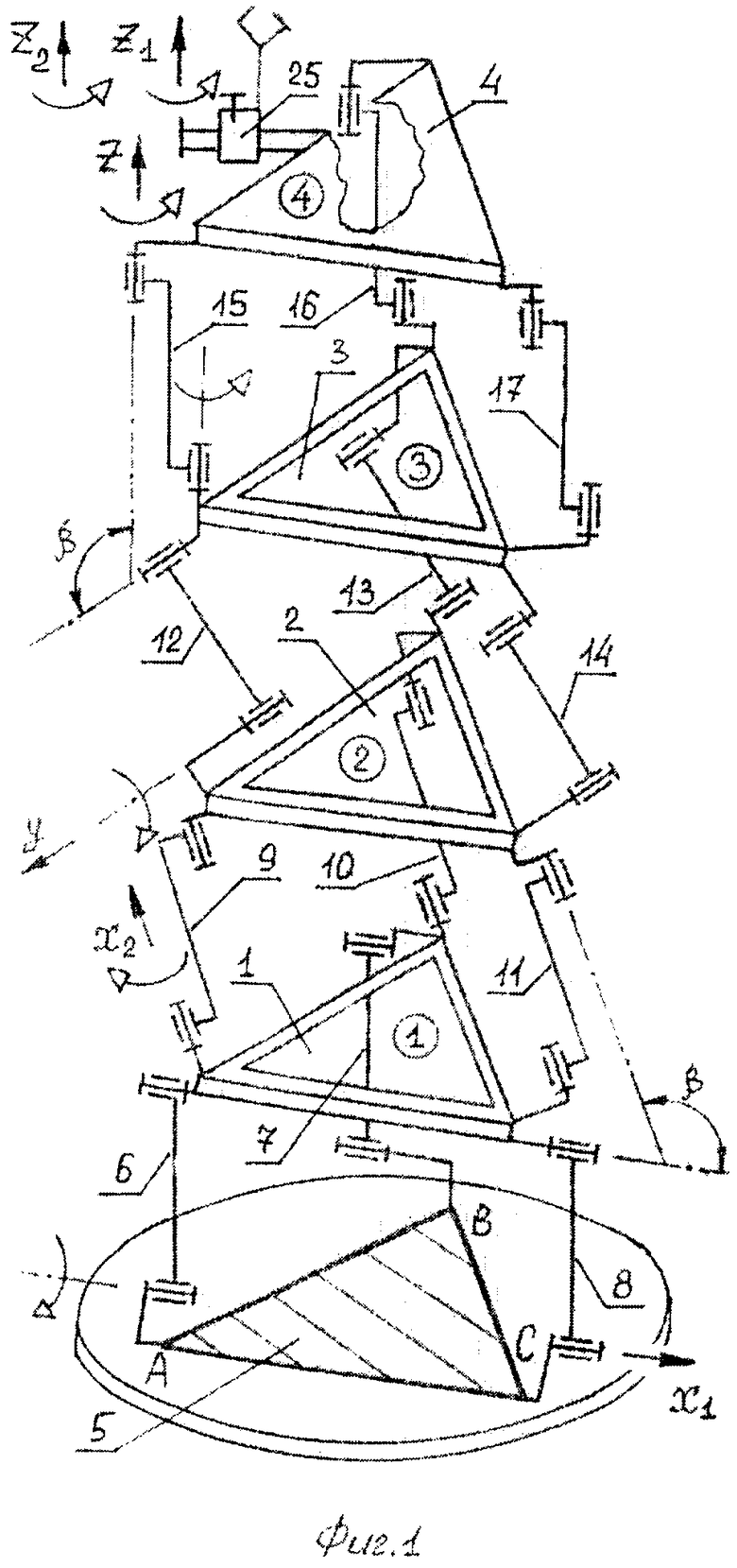
1. Сферический манипулятор, содержащий подвижное замкнутое кинематическое соединение платформ и приводных одноподвижных кинематических пар, отличающийся тем, что он содержит последовательно установленные по вертикали и расположенные в параллельных горизонтальных плоскостях опорную платформу и четыре подвижные платформы, при этом смежные платформы каждой пары из указанных платформ соединены между собой посредством поворотных параллельно установленных рычагов одинаковой длины, образующих с соединяемыми платформами цилиндрические шарниры в виде вращательных кинематических пар с параллельными между собой осями вращения, при этом оси вращения поворотных рычагов, соединяющих опорное основание и первую подвижную платформу, первую и вторую подвижные платформы и вторую и третью подвижные платформы, расположены в горизонтальной плоскости, а оси вращения поворотных рычагов, соединяющих третью и четвертую выходную подвижные платформы, расположены в вертикальной плоскости.
2. Сферический манипулятор по п. 1, отличающийся тем, что ось вращения поворотного рычага, соединяющего опорное основание и первую подвижную платформу с образованием приводной вращательной кинематической пары, расположена вдоль оси координат х1, ось вращения поворотного рычага, соединяющего первую и вторую подвижные платформы с образованием приводной вращательной кинематической пары, расположена вдоль оси координат х2, ось вращения поворотного рычага, соединяющего вторую и третью подвижные платформы с образованием приводной вращательной кинематической пары, расположена вдоль оси координат у, а ось вращения поворотного рычага, соединяющего третью и четвертую выходную подвижные платформы с образованием приводной вращательной кинематической пары, расположена вдоль оси координат z в системе координат «х1-х2-у-z», в которой три оси х1, х2, у расположены в общей горизонтальной плоскости, а четвертая ось z расположена в вертикальной плоскости, при этом все четыре оси х1, x2, y, z имеют общую точку пересечения.
3. Сферический манипулятор по п. 1, отличающийся тем, что поворотные рычаги выполнены в виде двухшарнирных звеньев с одинаковым расстоянием между отверстиями цилиндрических шарниров.
4. Сферический манипулятор по п. 1, отличающийся тем, что поворотные рычаги выполнены в виде шарнирно установленных в подвижных платформах приводных цилиндрических эксцентриков, при этом в каждой подвижной платформе шарнирно установлены по меньшей мере два приводных цилиндрических эксцентрика одинакового диаметра и с одинаковым эксцентриситетом, оси вращения которых параллельны, причем приводные цилиндрические эксцентрики подвижных платформ установлены с возможностью вращения соответственно вокруг оси х1 и оси у, расположенных в горизонтальной плоскости, и вокруг оси z, расположенной в вертикальной плоскости.
5. Сферический манипулятор по п. 1, отличающийся тем, что каждая подвижная платформа с установленными по периметру и шарнирно присоединенными к ней поворотными рычагами образует блочный модуль, при этом блочные модули последовательно расположены по вертикали с угловым разворотом смежных модулей на угол  где k - число поворотных рычагов, установленных по периметру подвижной платформы.
где k - число поворотных рычагов, установленных по периметру подвижной платформы.
6. Сферический манипулятор по п. 1, отличающийся тем, что он снабжен рабочим органом с ползуном, установленным на подвижной выходной платформе и соединенным с ней с возможностью относительного перемещения и последующей фиксации для обеспечения плоскопараллельного вращения рабочего органа вокруг параллельных осей, расположенных вертикально.
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| Обмазка для покрытия электродов | 1955 |
|
SU110326A1 |
| US 6729202 B2, 04.05.2004 | |||
| US 4976582 A1, 11.12.1990. | |||

