Изобретение относится к космической технике и может быть применено для повышения качества съемки, осуществляемой аппаратурой, установленной на борту космического аппарата (КА).
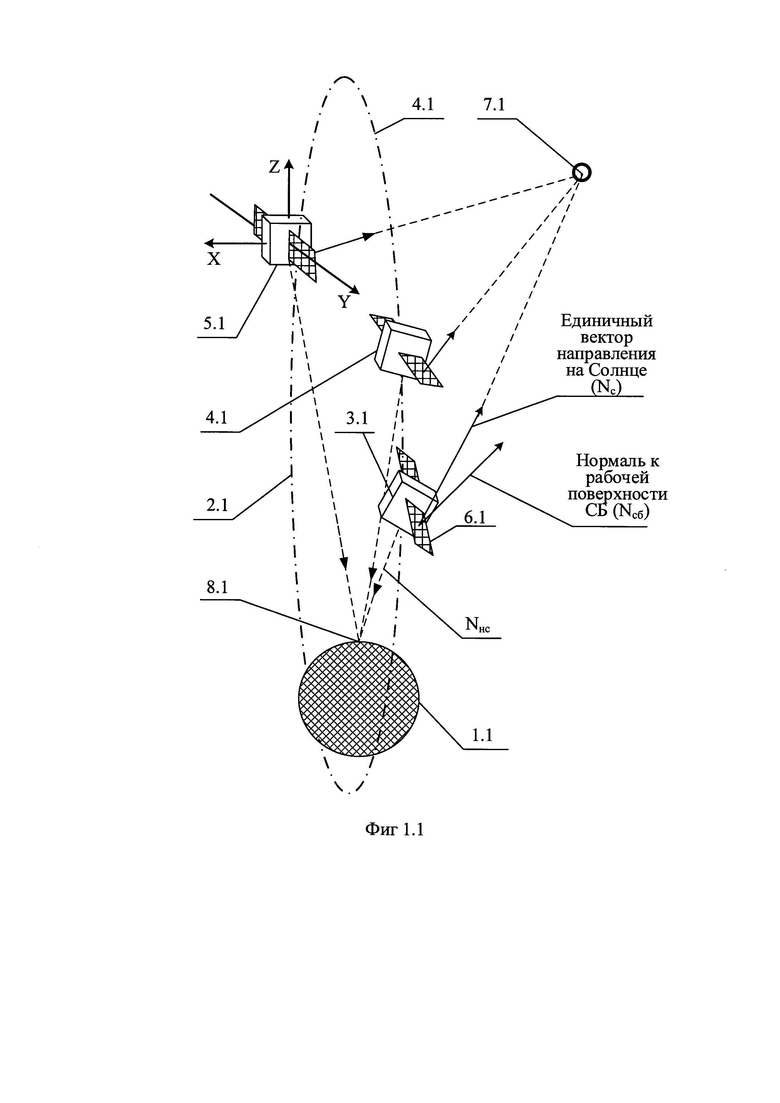
Изобретение может быть применено для космических аппаратов, функционирующих на эллиптических, геостационарных и круговых солнечно-синхронных орбитах, с периодически повторяющимися режимами работы. К указанным космическим аппаратам могут быть отнесены, например, спутники Земли, обеспечивающие гидрометеорологические исследования и мониторинг окружающей среды Земли. Такие спутники осуществляют дистанционное зондирование Земли, производят многоспектральную съемку наблюдаемой поверхности Земли, а также собирают метеорологические и гелиогеофизические данные (фиг.1.1).
Съемка земной поверхности выполняется сеансами, каждый из которых состоит из нескольких однократных съемок фиксированной длительности, с различными интервалами времени между ними. Как правило, в одном сеансе интервалы времени между съемками имеют фиксированную величину.
Для получения качественных изображений в результате съемки, необходимо перестроить работу ряда систем космического аппарата, в частности, солнечных батарей (СБ).
Во время съемок предъявляются повышенные требования к стабилизации космического аппарата. Поэтому на время съемки прекращают движение солнечных батарей.
В результате движения и торможения солнечных батарей на борту космического аппарата возникает вибрация, которая в конечном итоге влияет на качество съемки. Для гашения возникающих в результате вибрации колебаний КА при помощи бортовых систем стабилизации требуется время.
Организация движения солнечной батареи обычно осуществляется с помощью электропривода, с жестко закрепленной на его выходном валу панелью солнечной батареи с фоточувствительными элементами. Электроприводы обладают инерционностью, поэтому необходимо осуществлять его постепенный разгон и торможение.
Угловая скорость движения солнечных батарей, относительно связанной с космическим аппаратом системы координат, как правило, на порядок и более превышает угловую скорость движения космического аппарата вокруг Земли. В процессе полета космического аппарата осуществляется периодическое движение солнечных батарей при достижении определенного фиксированного угла рассогласования на начало движения между нормалью к рабочей поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость ее вращения, заданного ранее.
Исходя из этого, необходимо обеспечивать своевременное начало разгона и торможение с тем, чтобы эти факторы оказывали минимальное влияние на стабильность положения КА во время съемки.
В случае, если интервалы между съемками соизмеримы или меньше времени поворота солнечных батарей на фиксированный угол рассогласования на начало движения, может происходить снижение уровня электроснабжения, вырабатываемого солнечными батареями.
Ресурс систем, обеспечивающих движение солнечных батарей по количеству движений солнечных батарей, за все время эксплуатации космического аппарата ограничен. Таким образом, в результате выдачи команд на начало движения солнечных батарей расходуют ресурс солнечных батарей. В связи с этим, необходимо минимизировать количество указанных команд путем выбора оптимального порога срабатывания, соответствующего заданным параметрам работы солнечных батарей.
В случае если предлагаемое изобретение не применяется, движения солнечных батарей во время съемок происходит независимо по достижению углов рассогласования величины порогового угла на начало движения, который является фиксированной величиной. Ввиду того, что датчики углов имеют разброс характеристик по точности, со временем движение двух солнечных батарей может происходить в разное время.
Кроме этого, достижение порога срабатывания, при котором должно осуществляться движение солнечных батарей может происходить в случайные моменты времени относительно внешних сигналов съемки.
Поэтому, время стабилизации космического аппарата, в результате гашения колебаний, возникающих из-за движения, например, двух солнечных батарей, может удлиняться в результате их возникновения в различные моменты времени. Кроме того, если интервал между съемками соизмерим или меньше времени движения солнечной батареи, после достижения порога срабатывания до прекращения движения при достижении угла торможения, во время сеансов съемки может происходить постепенное увеличение угла рассогласования, что в итоге может привести к снижению электроснабжения КА во время съемки.
Проблему организации оптимального движения солнечных батарей достаточно давно и часто пытались решить.
Например, в [1] последовательно разворачивают солнечные батареи в дискретные положения, в которых значение порогового угла меньше фиксированного значения, определяют значение угла рассогласования на моменты прохождения космическим аппаратом подсолнечной точки витков орбиты. Недостатком приведенного способа является отсутствие синхронизации вращения солнечной батареи с работой аппаратуры съемки Земли.
В [2], произведя съемку Земли и определив ее яркость, уточняют параметры солнечной батареи. А в [3], произведя съемку освещенных Солнцем элементов конструкции космического аппарата, уточняют значения параметров солнечных батарей. Недостатком приведенных способов является отсутствие управления солнечными батареями.
В [4] расширяют функциональные возможности способа управления положением солнечных батарей путем введения контроля изменения углового положения солнечных батарей во время вращения.
Наиболее близким является способ управления положением солнечной батареи космического аппарата [5], включающий определение заданного угла установки солнечной батареи относительно связанных с космическим аппаратом осей координат и измерение углового положения нормали к рабочей поверхности солнечной батареи относительно указанных осей координат. Корректируют расчетный угол по измеренному угловому положению указанной нормали в моменты изменения показаний датчика угла на величину одного дискретного сектора. Вращение солнечной батареи прекращают, если рассогласование между заданным и расчетным углами начинает увеличиваться, но не превышает порога срабатывания.
Недостатком приведенного способа является отсутствие синхронизации движения солнечных батарей с временем однократных съемок в сеансах, а также, отсутствие обеспечения во время функционирования КА оптимального порогового угла между проекциями нормалей к рабочей поверхности солнечных батарей к вектору направления на Солнце.
Техническим результатом предлагаемого изобретения является улучшение качества изображений, получаемых при съемке с борта КА. Указанный технический результат достигается повышением стабильности космического аппарата во время съемок Земли, путем уменьшения влияния колебаний панелей солнечных батарей при торможении. Дополнительным техническим результатом является уменьшение потерь электроэнергии, вызванное остановками солнечных батарей для съемок.
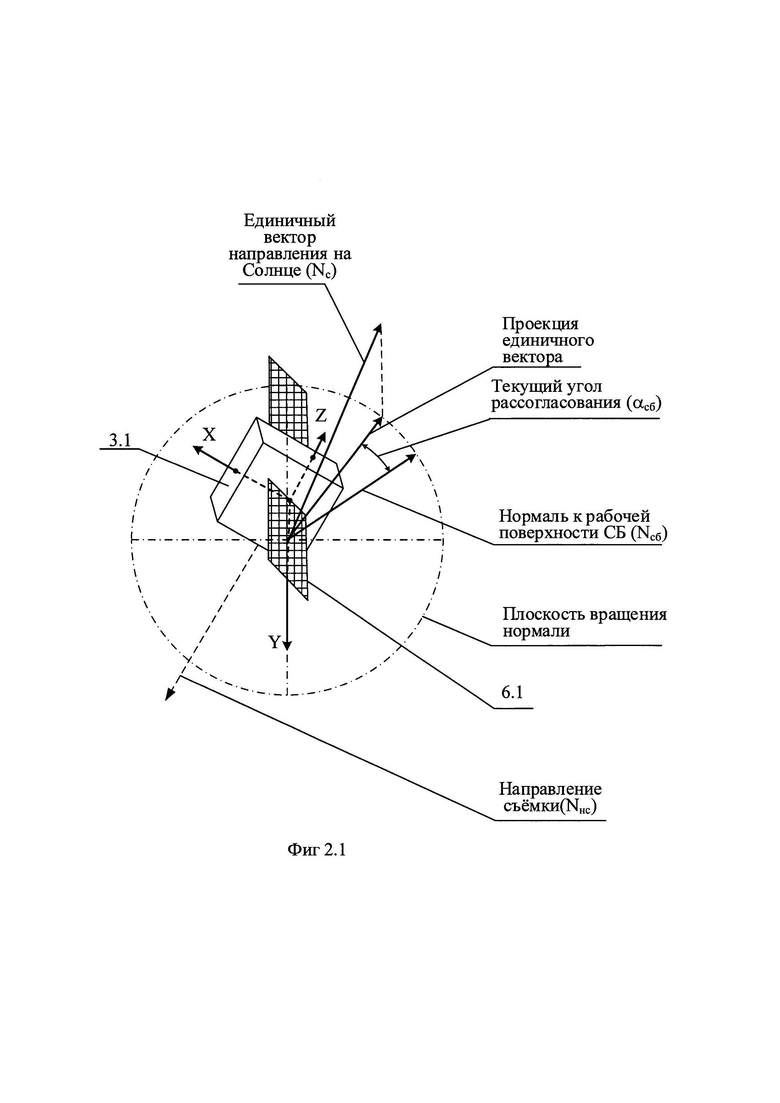
В предлагаемом изобретении указанный технический результат достигается следующим образом. В известном способе управления системой ориентации солнечных батарей космического аппарата, задается штатный режим движения солнечных батарей с пороговым углом (αпор) начала движения солнечных батарей в направлении уменьшения текущего угла рассогласования  представленного на фиг.2.1., как угла между нормалью
представленного на фиг.2.1., как угла между нормалью  к рабочей поверхности солнечной батареи и проекцией единичного вектора
к рабочей поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость вращения указанной нормали, который определяют по формуле
направления на Солнце на плоскость вращения указанной нормали, который определяют по формуле

 - угол, на который отклоняется нормаль к рабочей поверхности солнечной батареи во время ее движения с фиксированной скоростью после окончания разгона до начала торможения,
- угол, на который отклоняется нормаль к рабочей поверхности солнечной батареи во время ее движения с фиксированной скоростью после окончания разгона до начала торможения,  - угол разгона солнечной батареи,
- угол разгона солнечной батареи,  - угол торможения солнечной батареи,
- угол торможения солнечной батареи,  - погрешность определения угла рассогласования, с прекращением движения при достижении углом рассогласования величины угла торможения. Затем определяют время движения солнечных батарей по формуле
- погрешность определения угла рассогласования, с прекращением движения при достижении углом рассогласования величины угла торможения. Затем определяют время движения солнечных батарей по формуле  а также время стабилизации положения космического аппарата
а также время стабилизации положения космического аппарата при повороте солнечных батарей на пороговый угол
при повороте солнечных батарей на пороговый угол  - длительность стабилизации положения космического аппарата от начала торможения солнечных батарей, также определяют режим съемок и сеансов путем измерения интервалов времени между однократными съемками (Ти), находящимися в диапазоне между минимальным (Tmin) и максимальным значениями (Tmax) и интервалов между сеансами (Тс) съемок по внешнему сигналу, состоящему из переднего и заднего фронта, по переднему фронту которого прекращается движение, а по заднему фронту, которого, разрешается движение солнечных батарей, дополнительно по заднему фронту внешнего сигнала, соответствующему окончанию первой однократной съемки, разрешают движение солнечных батарей независимо друг от друга в направлении уменьшения угла рассогласования, если угол рассогласования превышает угол торможения
- длительность стабилизации положения космического аппарата от начала торможения солнечных батарей, также определяют режим съемок и сеансов путем измерения интервалов времени между однократными съемками (Ти), находящимися в диапазоне между минимальным (Tmin) и максимальным значениями (Tmax) и интервалов между сеансами (Тс) съемок по внешнему сигналу, состоящему из переднего и заднего фронта, по переднему фронту которого прекращается движение, а по заднему фронту, которого, разрешается движение солнечных батарей, дополнительно по заднему фронту внешнего сигнала, соответствующему окончанию первой однократной съемки, разрешают движение солнечных батарей независимо друг от друга в направлении уменьшения угла рассогласования, если угол рассогласования превышает угол торможения  а также дополнительно по заднему фронту внешнего сигнала, соответствующему окончанию второй и последующих однократных съемок, при условии, что, к началу этих съемок движение солнечных батарей было завершено штатно, задается одновременное движение солнечных батарей в направлении уменьшения угла рассогласования солнечной батареи, если угол рассогласования хотя бы одной солнечной батареи превышает пороговое значение
а также дополнительно по заднему фронту внешнего сигнала, соответствующему окончанию второй и последующих однократных съемок, при условии, что, к началу этих съемок движение солнечных батарей было завершено штатно, задается одновременное движение солнечных батарей в направлении уменьшения угла рассогласования солнечной батареи, если угол рассогласования хотя бы одной солнечной батареи превышает пороговое значение а в случае, если
а в случае, если , уменьшают значение порогового угла для начала движения солнечных батарей до величины более суммы углов разгона
, уменьшают значение порогового угла для начала движения солнечных батарей до величины более суммы углов разгона и торможения
и торможения и не превышающей величины угла движения солнечной батареи с фиксированной скоростью
и не превышающей величины угла движения солнечной батареи с фиксированной скоростью за время 0,5 Ти, с учетом точностей угловой скорости и измерения углового положения солнечной батареи, дополнительно, если движение солнечных батарей прекратилось по переднему фронту внешнего сигнала принудительно и при этом угол торможения
за время 0,5 Ти, с учетом точностей угловой скорости и измерения углового положения солнечной батареи, дополнительно, если движение солнечных батарей прекратилось по переднему фронту внешнего сигнала принудительно и при этом угол торможения не был достигнут, задают новое значение порогового угла
не был достигнут, задают новое значение порогового угла  кроме того, если время после заднего фронта внешнего сигнала превысило минимальный интервал между сеансами (Тс), возвращаются к штатному движению солнечных батарей.
кроме того, если время после заднего фронта внешнего сигнала превысило минимальный интервал между сеансами (Тс), возвращаются к штатному движению солнечных батарей.
Таким образом, при одновременном движении, осуществляют синхронное движение обеих солнечных батарей.
Согласно второму предлагаемого изобретения в известном способе управления системой ориентации солнечных батарей космического аппарата, задается штатный режим движения солнечных батарей с пороговым углом  начала движения солнечных батарей в направлении уменьшения текущего угла рассогласования
начала движения солнечных батарей в направлении уменьшения текущего угла рассогласования представленного на фиг.2.1., как угла между нормалью
представленного на фиг.2.1., как угла между нормалью к рабочей поверхности солнечной батареи и проекцией единичного вектора (Nc) направления на Солнце на плоскость вращения указанной нормали, который определяют по формуле
к рабочей поверхности солнечной батареи и проекцией единичного вектора (Nc) направления на Солнце на плоскость вращения указанной нормали, который определяют по формуле 
 - угол, на который отклоняется нормаль к рабочей поверхности солнечной батареи во время ее движения с фиксированной скоростью после окончания разгона до начала торможения,
- угол, на который отклоняется нормаль к рабочей поверхности солнечной батареи во время ее движения с фиксированной скоростью после окончания разгона до начала торможения,  - угол разгона солнечной батареи,
- угол разгона солнечной батареи,  - угол торможения солнечной батареи,
- угол торможения солнечной батареи,  - погрешность определения угла рассогласования, с прекращением движения при достижении углом рассогласования величины угла торможения, отличающийся тем, что
- погрешность определения угла рассогласования, с прекращением движения при достижении углом рассогласования величины угла торможения, отличающийся тем, что
определяют время движения солнечных батарей как:  ,
,
определяют время стабилизации положения космического аппарата (Тнст), при повороте солнечных батарей на пороговый угол  как
как

 - длительность стабилизации положения космического аппарата от начала торможения солнечной батареи;
- длительность стабилизации положения космического аппарата от начала торможения солнечной батареи;
определяют режим съемок и сеансов путем измерения интервалов времени между однократными съемками (Ти), находящимися в диапазоне между минимальным (Tmin) и максимальным значениями (Tmax) и интервалов между сеансами (Тс) съемок по внешнему сигналу, состоящему из переднего и заднего фронта, по переднему фронту которого прекращается движение, а по заднему фронту, которого, разрешается движение солнечных батарей;
по заднему фронту внешнего сигнала, соответствующему окончанию первой однократной съемки, разрешают движение солнечных батарей независимо друг от друга в направлении уменьшения угла рассогласования, если угол рассогласования превышает угол торможения 
по заднему фронту внешнего сигнала, соответствующему окончанию второй и последующих однократных съемок, при условии, что, к началу этих съемок движение солнечных батарей было завершено штатно на одном интервале между однократными съемками разрешают движение только одной солнечной батареи, угол рассогласования которой больше угла рассогласования другой солнечной батареи и он превышает пороговое значение  а в случае, если
а в случае, если  , уменьшают значение порогового угла для начала движения солнечных батарей до величины более суммы углов разгона
, уменьшают значение порогового угла для начала движения солнечных батарей до величины более суммы углов разгона  и торможения
и торможения  и не превышающей величины угла движения солнечной батареи с фиксированной скоростью
и не превышающей величины угла движения солнечной батареи с фиксированной скоростью  за время 0,5 Ти, с учетом точностей определения угловой скорости и измерения углового положения солнечной батареи;
за время 0,5 Ти, с учетом точностей определения угловой скорости и измерения углового положения солнечной батареи;
если время после заднего фронта внешнего сигнала превысило минимальный интервал между сеансами (Тс), возвращаются к штатному движению солнечных батарей.
Таким образом, между съемками осуществляют, как правило, попеременное, периодическое движение солнечных батарей.
Предложенный способ управления системой ориентации солнечных батарей космического аппарата реализуется следующим образом.
В процессе функционирования каждая солнечная батарея, расположенная на космическом аппарате, периодически начинает вращение при достижении порогового угла рассогласования между нормалью к рабочей поверхности солнечной батареи и проекцией единичного
и проекцией единичного
вектора направления на Солнце (Nc) на плоскость вращения указанной нормали (фиг. 2.1), так называемый заданный угол.
Для электроснабжения на борту космического аппарата используют, как правило, две солнечные батареи с идентичными параметрами движения, определение угловых положений которых производят в пределах погрешности измерений.
На фиг. 1.1 представлено изменение положения космического аппарата и солнечных батарей относительно направления на Солнце на различных участках орбиты.
Орбита выполняющего съемку земной поверхности космического аппарата является замкнутой и имеет круговую или эллиптическую форму.
В процессе съемок космический аппарат фиксируются в определенном положении для нацеливания установленной на его борту съемочной аппаратуры в определенную область земной поверхности. В случае, если орбита космического аппарата имеет эллиптическую форму, на различных ее участках угловая скорость вращения космического аппарат вокруг Земли различается. В течение сеанса съемки космический аппарат должен поддерживать постоянную ориентацию относительно определенной области земной поверхности. В случае эллиптической формы орбиты величины углов рассогласования солнечных батарей с направлением на Солнце за один и тот же интервал времени на различных участках орбиты отличаются. Периоды однократных съемок в различных сеансах также могут отличаться.
На фиг.1.1 ось вращения одной солнечной батареи направлена вдоль оси плюс Y, ось вращения другой солнечной батареи направлена по оси минус Y, связанной с космическим аппаратом системы координат (X, Y, Z). Во время управления фотоэлектрические панели солнечных батарей вращаются в одну сторону относительно оси Y. Управление ориентацией первой солнечной батареи осуществляется непосредственно по пороговому углу, формируемому системой управления движением и навигацией.
Управление системой ориентации солнечных батарей космического аппарата осуществляется по алгоритмам, заложенным в бортовые вычислительные машины космического аппарата. Команды, сформированные алгоритмами из бортовой вычислительной машины через устройство сопряжения, поступает в устройство поворота солнечных батарей.
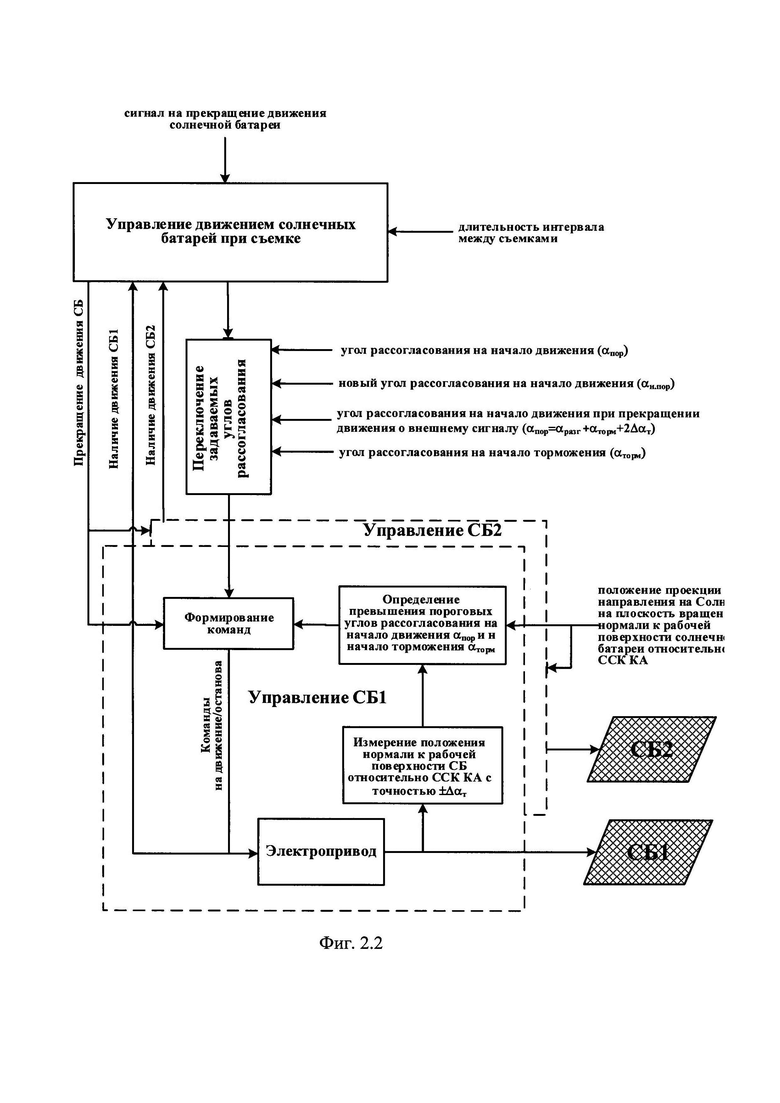
На фиг. 2.2 представлена структурная схема управления двумя солнечными батареями при съемках Земли.
Информация о начале и завершении съемки земной поверхности передается с помощью сигнала, передний фронт которого соответствует началу съемки, задний фронт сигнала соответствует завершению съемки. По переднему фронту этого сигнала запрещается, а, по заднему фронту разрешается движение солнечных батарей.
Если съемка Земли отсутствует, задают штатный режим движения солнечных батарей с пороговым углом  начала движения солнечных батарей в направлении уменьшения текущего угла рассогласования
начала движения солнечных батарей в направлении уменьшения текущего угла рассогласования  как угла между нормалью к рабочей поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость вращения указанной нормали, равного
как угла между нормалью к рабочей поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость вращения указанной нормали, равного  , где
, где
 - угол, на который отклоняется нормаль к рабочей поверхности солнечной батареи во время ее движения с фиксированной скоростью после окончания разгона до начала торможения,
- угол, на который отклоняется нормаль к рабочей поверхности солнечной батареи во время ее движения с фиксированной скоростью после окончания разгона до начала торможения,  - погрешность определения угла рассогласования, например, погрешность измерения угла отклонения солнечной батареи датчиком,
- погрешность определения угла рассогласования, например, погрешность измерения угла отклонения солнечной батареи датчиком,  - угол разгона солнечной батареи,
- угол разгона солнечной батареи,  угол торможения солнечной батареи.
угол торможения солнечной батареи.
Для штатного режима определяют время движения солнечных батарей как: 
Кроме того, для штатного режима определяют время стабилизации положения космического аппарата  при повороте солнечных батарей на пороговый угол
при повороте солнечных батарей на пороговый угол 
В предлагаемом изобретении режим съемок определяют путем определения интервалов времени между однократными съемками (Ти), находящимися в диапазоне между минимальным (Tmin) и максимальным значениями (Tmax) и интервалов между сеансами (Тс) съемок по внешнему сигналу, состоящему из переднего и заднего фронта, по переднему фронту которого прекращают движение, а по заднему фронту, которого, разрешают движение солнечных батарей (фиг. 2.3 и фиг. 2.4).
Для электроснабжения на борту космического аппарата используют две солнечные батареи с идентичными параметрами движения и определения угловых положений в пределах погрешности измерений,
Прекращение и разрешение движения солнечных батарей задается передним и задним фронтами сигнала, соответствующих началу и завершению съемки.
Согласно предлагаемому изобретению после первой однократной съемки устанавливают солнечные батареи в начальное взаимно согласованное положение, которое задают следующим образом. По заднему фронту внешнего сигнала, соответствующему окончанию первой однократной съемки, разрешают движение солнечных батарей независимо друг от друга в направлении уменьшения угла рассогласования, если угол рассогласования превышает угол торможения Таким образом,
Таким образом,
осуществляют синхронизацию положения солнечных батарей перед началом работы.
Далее действуют по заднему фронту внешнего сигнала, соответствующему окончанию второй и последующих однократных съемок. Оценивают условия, в результате которых прекратилось движение солнечных батарей. Движение солнечных батарей может прекращаться штатно, при достижении порога торможения или принудительно, по переднему фронту сигнала начала съемки.
Если движение солнечных батарей было завершено штатно, т.е. без принудительной остановки в связи с началом съемки, производятся следующие действия. Оценивается соотношение длительности интервала между съемками (Ти) и времени стабилизации положения космического аппарата
Возможны два варианта управления: с одновременным и попеременным движением солнечных батарей. Вариант управления выбирается с учетом обеспечения максимального уровня энергоснабжения, длительностей интервалов между съемками, а также с учетом времени стабилизации космического аппарата после движения одной или обеих солнечных батарей управляющими моментами, формируемыми системой стабилизации космического аппарата.
В варианте одновременного движения солнечные батареи начинают двигаться в направлении уменьшения угла рассогласования одновременно, если угол рассогласования хотя бы одной солнечной батареи превышает пороговое значение и угол рассогласования другой превышает угол торможения
и угол рассогласования другой превышает угол торможения
В варианте попеременного движения на одном интервале между однократными съемками может двигаться в направлении уменьшения угла рассогласования только одна солнечная батарея, угол рассогласования которой больше угла рассогласования другой солнечной батареи и он превышает пороговое значение
В случае, если уменьшают значение порогового угла для начала одновременного движения солнечных батарей до величины большей суммы углов разгона
уменьшают значение порогового угла для начала одновременного движения солнечных батарей до величины большей суммы углов разгона и торможения
и торможения и не превышающей угла движения солнечной батареи с фиксированной скоростью
и не превышающей угла движения солнечной батареи с фиксированной скоростью за время 0,5 Ти, с учетом точностей угловой скорости и измерения углового положения солнечной батареи.
за время 0,5 Ти, с учетом точностей угловой скорости и измерения углового положения солнечной батареи.
В случае, если движение солнечных батарей прекратилось по переднему фронту внешнего сигнала принудительно, т.е. в связи с началом съемки и при этом угол торможения не был достигнут, задают новое значение порогового угла
не был достигнут, задают новое значение порогового угла  как:
как:
В случае одновременного движения солнечных батарей, определенное по выражению (2) новое значение порогового угла задают для обеих солнечных батарей, а в случае попеременного движения - только для той солнечной батареи, движение которой прекратилось принудительно.
То есть, уменьшают значение порогового угла по сравнению с пороговым углом, определяемым по соотношению (1).
В случае, если установлено, что время после заднего фронта внешнего сигнала превысило минимальный интервал между сеансами (Тс), возвращаются к штатному движению солнечных батарей с первоначальным значением порогового значения  и прекращением движения при достижении угла рассогласования солнечной батареи равного углу торможения
и прекращением движения при достижении угла рассогласования солнечной батареи равного углу торможения
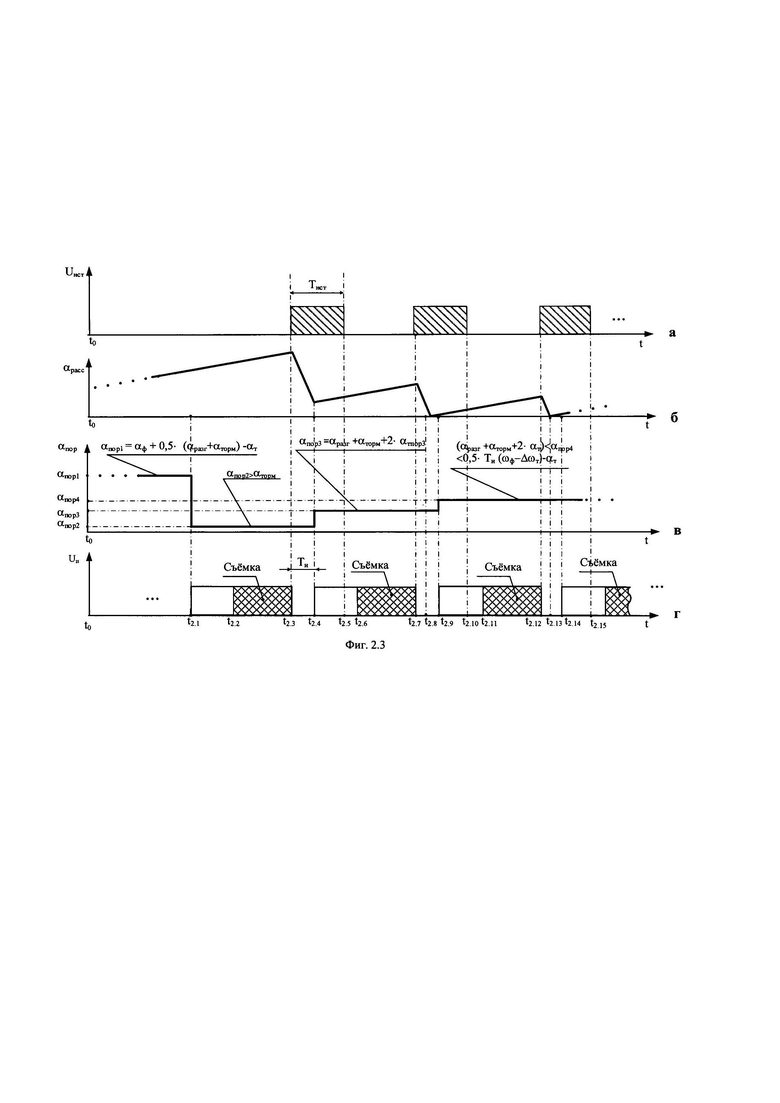
На фиг.2.3 представлены зависимости параметров одной солнечной батареи при движении с остановками для съемки от времени при коротких интервалах между съемками Ти близкими к Tmin с применением предлагаемого изобретения.
До начала съемки пороговый угол при начале движения солнечной батарей соответствует начальному значению
пороговый угол при начале движения солнечной батарей соответствует начальному значению который может определяется на этапе разработки, как:
который может определяется на этапе разработки, как:
В момент  устанавливается второй пороговый угол на начало движения
устанавливается второй пороговый угол на начало движения  равный углу торможения
равный углу торможения  при превышении которого должно начинаться движение солнечной батареи.
при превышении которого должно начинаться движение солнечной батареи.
Начиная с момента  по момент
по момент  осуществляется движение солнечной батареи, так как угол рассогласования
осуществляется движение солнечной батареи, так как угол рассогласования превышает угол торможения
превышает угол торможения В момент
В момент угол пороговый угол отработан не
угол пороговый угол отработан не
полностью, а торможение солнечной батареи осуществляется по переднему фронту внешнего сигнала на прекращение движения солнечной батареи. При этом устанавливается третий пороговый угол на начало движения  как:
как: 
Далее, в момент в результате измерения интервала между сигналами Ти устанавливается четвертый пороговый угол
в результате измерения интервала между сигналами Ти устанавливается четвертый пороговый угол Так как
Так как  задают четвертое значение порогового угла для начала движения солнечных батарей
задают четвертое значение порогового угла для начала движения солнечных батарей больше суммы углов разгона
больше суммы углов разгона и торможения
и торможения  и не превышающей величины угла движения солнечной батареи с фиксированной скоростью
и не превышающей величины угла движения солнечной батареи с фиксированной скоростью за время 0,5 Ти, с учетом точностей определения угловой скорости и углового положения солнечной батареи.
за время 0,5 Ти, с учетом точностей определения угловой скорости и углового положения солнечной батареи.
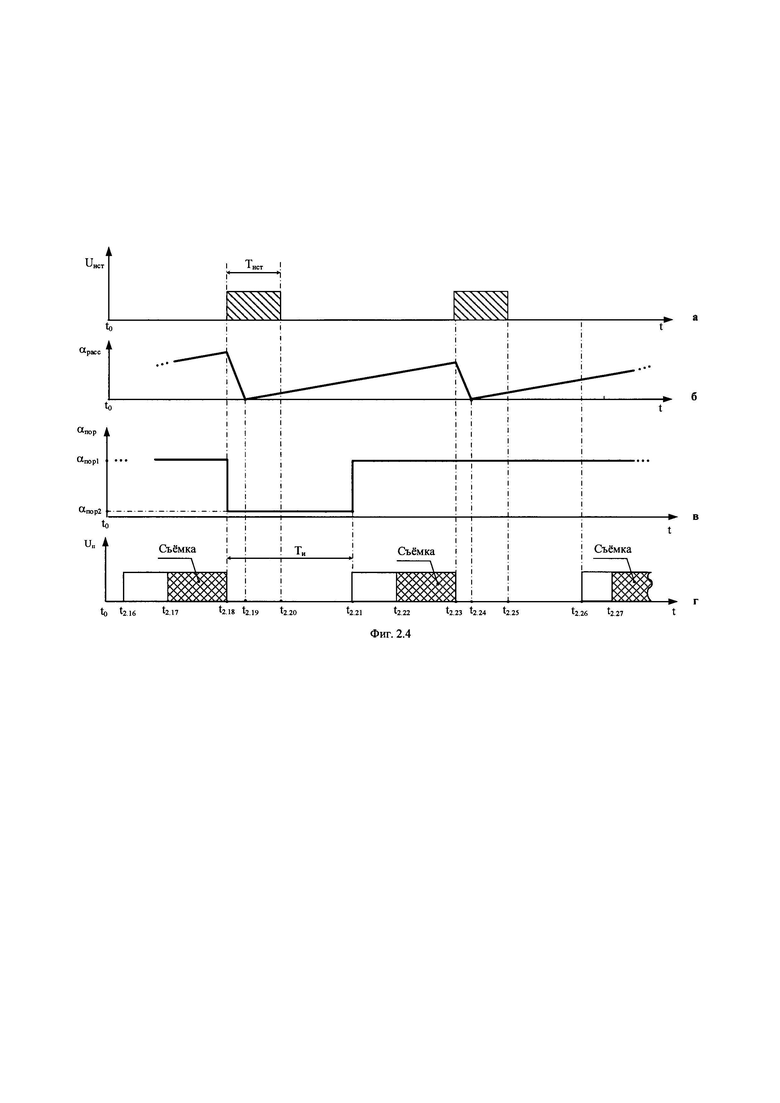
На фиг.2.4 в представлены зависимости параметров одной солнечной батареи при движении с остановками для съемки от времени с большим интервалом между съемками Ти, более  с применением предлагаемого изобретения.
с применением предлагаемого изобретения.
На рисунке фиг.2.4, как и на фиг.2.3 представлены графики тех же зависимостей, но показано, что пороговый угол на начало движения изменяется с начального значения
изменяется с начального значения на первом интервале между съемками на значение равное углу торможения
на первом интервале между съемками на значение равное углу торможения при превышении которого должно начинаться движение солнечной батарей
при превышении которого должно начинаться движение солнечной батарей На
На  последующих интервалах вновь устанавливается начальное значение порогового угла на начало движения
последующих интервалах вновь устанавливается начальное значение порогового угла на начало движения
Кроме того, показано, что отработка угла осуществляется только по заднему фронту сигнала прекращения движения солнечной батареи и стабилизация космического аппарата происходит до следующего сигнала на прекращение движения.
До начала съемки пороговый угол на начало движения солнечной батарей соответствует начальному значению
пороговый угол на начало движения солнечной батарей соответствует начальному значению который определяется на разработки, как:
который определяется на разработки, как:
В момент устанавливается второй пороговый угол на начало движения
устанавливается второй пороговый угол на начало движения равный углу торможения
равный углу торможения при этом движение солнечной батареи должно начинаться при превышении угла торможения, то есть, при
при этом движение солнечной батареи должно начинаться при превышении угла торможения, то есть, при Начиная с момента
Начиная с момента по момент
по момент осуществляется движение солнечной батареи, так как угол рассогласования
осуществляется движение солнечной батареи, так как угол рассогласования превышает угол торможения
превышает угол торможения В момент
В момент устанавливается пороговый угол на
устанавливается пороговый угол на
начало движения соответствующий начальному (штатному) значению так как измеренный интервал превышает время стабилизации космического аппарата, вызываемого движением солнечной батареи, то есть
так как измеренный интервал превышает время стабилизации космического аппарата, вызываемого движением солнечной батареи, то есть Начиная с момента
Начиная с момента до момента
до момента осуществляется движение солнечной батареи, так как угол рассогласования
осуществляется движение солнечной батареи, так как угол рассогласования превышает угол на начало движения солнечной батареи, который соответствует начальному значению
превышает угол на начало движения солнечной батареи, который соответствует начальному значению  Как видно из графиков при интервалах между съемками (Ти) близких к максимальному значению (Tmax) стабилизация положения космического аппарата осуществляется, как правило, до появления сигнала на прекращение движения солнечной батареи.
Как видно из графиков при интервалах между съемками (Ти) близких к максимальному значению (Tmax) стабилизация положения космического аппарата осуществляется, как правило, до появления сигнала на прекращение движения солнечной батареи.
Возможны два варианта осуществления изобретения.
Первый и второй варианты изобретения отличаются друг от друга тем, что движение солнечных батарей по окончанию второй и последующих однократных съемок осуществляют одновременно или попеременно.
Таким образом, предлагаемый настоящим изобретением способ управления системой ориентации солнечных батарей космического аппарата при съемке Земли, обеспечивает улучшение качества изображений, получаемых в результате съемки Земли, которое достигается путем уменьшения колебаний и вибраций на борту космического аппарата, возникающих в результате движения солнечных батарей к моменту начала съемки, с учетом их разгона и торможения для своевременной плавной остановки.
Дополнительным техническим результатом является уменьшение снижение энергоснабжения аппаратуры космического аппарата.
Снижение влияния вибраций и колебаний, возникающих при движении солнечных батарей, на съемочную аппаратуру, а также с снижение потерь энергоснабжения, достигается за счет:
- разрешения движения солнечных батарей только в моменты окончания однократных съемок в сеансе;
- приведения положения солнечных к заданному углу после первой съемки в сеансе;
- формирования команд на движение обеих солнечных батарей в направлении уменьшения рассогласования, если в момент окончания съемки положение, хотя бы одной из них, достигло угла рассогласования на начало движения, а другой превышает порог торможения;
- уменьшения величины угла рассогласования на начало движения солнечных батарей.
Подписи к рисункам
Фиг. 1.1 Изменение положения КА и солнечных батарей относительно направления на Солнце на различных участках орбиты.
1.1 - Земля, 2.1 - орбита, 3.1, 4.1, 5.1 - положения космического аппарата на различных участках орбиты, 6.1 - солнечная батарея,
7.1 - Солнце, 8.1 - область съемки на Земной поверхности,
X, Y, Z- оси связанной с космическим аппаратом системы координат,
Nc - единичный вектор направления на Солнце, NC6 - нормаль к поверхности солнечной батареи.
Фиг. 2.1 Угол рассогласования солнечной батареи
Nнc - направление съемки, Nc - единичный вектор направления на Солнце, Nсб - нормаль к поверхности солнечной батареи.
Фиг. 2.2 Структурная схема управления двумя солнечными батареями при съемках Земли.
СБ1, СБ2 - первая и вторая солнечные батареи
Фиг. 2.3. Зависимости параметров одной солнечной батареи от времени при движении с остановками для съемки с короткими интервалами между съемками Ти близким к Tmin с применением предлагаемого изобретения.
а - изменение от времени сигнала наличия стабилизации космического аппарата (UHCT), вызываемого движением солнечной батареи,
б - изменение от времени углов рассогласования между нормалью к поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость вращения нормали,
в - изменение от времени пороговых углов на начало движения солнечной батареи 
г -изменение от времени и длительности съемки внешнего сигнала, соответствующего наличию и прекращения движения солнечной батареи (Uп).
 - передние фронты внешнего сигнала при котором прекращается движение солнечной батареи,
- передние фронты внешнего сигнала при котором прекращается движение солнечной батареи,
 - времена начала съемки,
- времена начала съемки,
 - задние фронты внешнего сигнала, при котором разрешается движение солнечных батарей,
- задние фронты внешнего сигнала, при котором разрешается движение солнечных батарей,
 - времена прекращения движения солнечной батареи после торможения,
- времена прекращения движения солнечной батареи после торможения,
 - времена начала стабилизации положения космического аппарата,
- времена начала стабилизации положения космического аппарата,  - времена окончания стабилизации положения
- времена окончания стабилизации положения
космического аппарата
Фиг. 2.4. Зависимости параметров одной солнечной батареи от времени при движении с остановками для съемки с большим интервалом между съемками Ти, близким к максимальному (Tmax) с применением предлагаемого способа.
а - изменение от времени сигнала наличия стабилизации космического аппарата вызываемого движением солнечной батареи,
вызываемого движением солнечной батареи,
б - изменение от времени углов рассогласования между нормалью к поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость вращения нормали,
в - изменение от времени пороговых углов на начало движения солнечной батареи
г - изменение от времени и длительности съемки внешнего сигнала, соответствующего наличию и прекращения движения солнечной батареи (Uп)
 - времена установки внешнего сигнала на прекращение движения солнечной батареи для проведения съемки,
- времена установки внешнего сигнала на прекращение движения солнечной батареи для проведения съемки,
 - времена снятия сигнала на прекращение движения солнечной батареи, совпадающие с временами начала движения и нарушения стабилизации положения космического аппарата,
- времена снятия сигнала на прекращение движения солнечной батареи, совпадающие с временами начала движения и нарушения стабилизации положения космического аппарата,
 - времена начала съемки после установки внешнего сигнала прекращения движения солнечной батареи,
- времена начала съемки после установки внешнего сигнала прекращения движения солнечной батареи,
 - времена прекращения движения солнечной батареи после торможения,
- времена прекращения движения солнечной батареи после торможения,
 - времена начала стабилизации положения космического аппарата,
- времена начала стабилизации положения космического аппарата,
 - времена окончания стабилизации положения космического аппарата.
- времена окончания стабилизации положения космического аппарата.
Источники информации:
1. RU 2640937 12.01.2018 B64G1/44.
2. RU 2662372 25.07.2018 B64G1/44.
3. RU 2665145 28.08.2018 B64G1/44.
4. RU 2368545 27.09.2009 B64G1/24 B64G1/44.
5. RU 2356788 27.05.2009 B64G1/00.
Группа изобретений относится к области космической техники, в частности к способам управления системой ориентации солнечных батарей (СБ) космического аппарата (КА) при съемке Земли. Для этого определяют угол установки СБ, время движения СБ и время стабилизации положения КА при повороте СБ на пороговый угол. Определяют режим съемок и сеансов путем измерения интервалов времени между однократными съемками по внешнему сигналу, состоящему из переднего и заднего фронтов, соответствующих началу и прекращению съемки. По переднему фронту этого сигнала прекращается движение, а по заднему фронту разрешается движение СБ. При первой съемке синхронизируют положение СБ. Если СБ для проведения съемок были остановлены принудительно, уменьшают значение порогового угла СБ. Далее предусматривается два варианта управления движением СБ с одновременным или попеременным движением СБ. Таким образом достигается улучшение качества изображений съемки Земли с борта КА и уменьшение потерь электроэнергии. 2 н.п. ф-лы, 5 ил.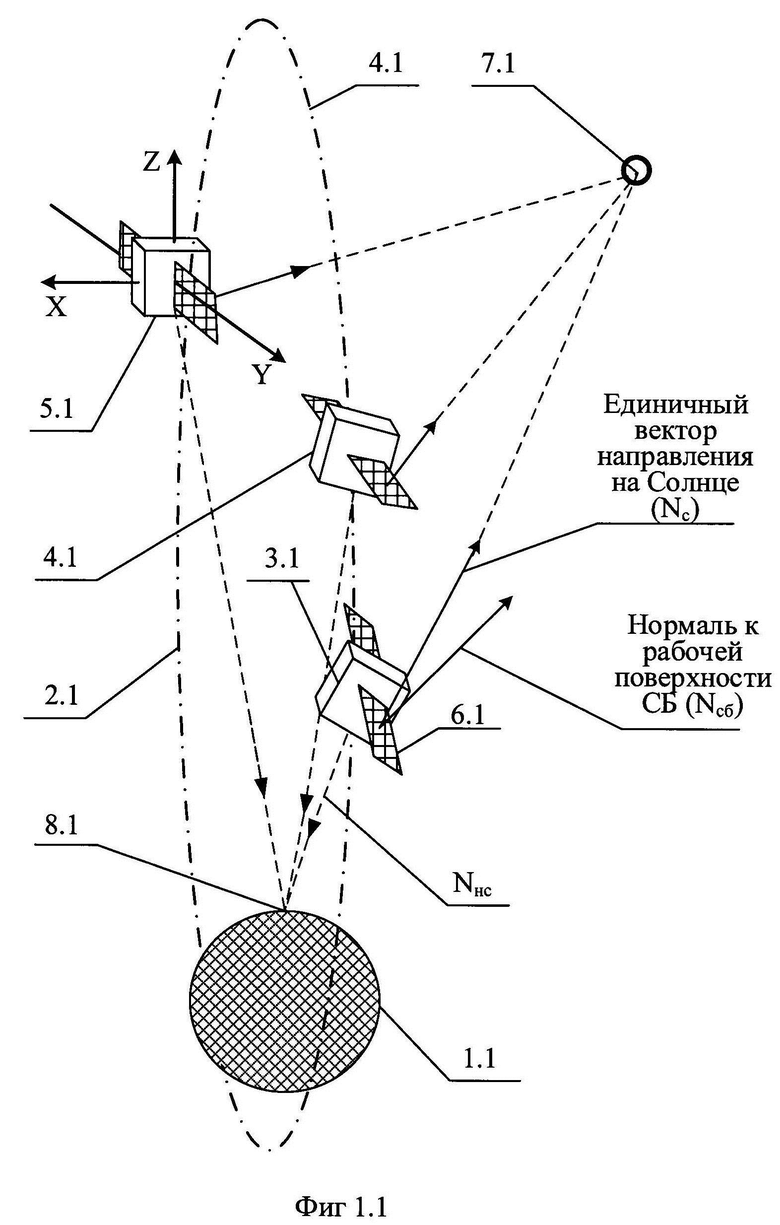
1.Способ управления системой ориентации солнечных батарей космического аппарата при съемке Земли, включающий:
задание штатного режима движения солнечных батарей с пороговым углом (αпор) начала движения солнечных батарей в направлении уменьшения текущего угла рассогласования (αсб), как угла между нормалью к рабочей поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость вращения указанной нормали, равного

αф - угол между положениями нормали во время движения солнечных батарей с фиксированной скоростью,
Δαт - погрешность определения угла рассогласования,
αразг - угол разгона солнечной батареи,
αторм - угол торможения солнечной батареи,
с прекращением движения при достижении углом рассогласования величины угла торможения, отличающийся тем, что
определяют время движения солнечных батарей как 
определяют время стабилизации положения космического аппарата (Тнст), при повороте солнечных батарей на пороговый угол (αпор)

tcтaб - длительность стабилизации положения космического аппарата от начала торможения солнечной батареи;
определяют режим съемок и сеансов путем измерения интервалов времени между однократными съемками (Ти), находящимися в диапазоне между
минимальным (Tmin) и максимальным значениями (Tmax) и интервалов между сеансами (Тс) съемок по внешнему сигналу, состоящему из переднего и заднего фронта, по переднему фронту которого прекращается движение, а по заднему фронту которого разрешается движение солнечных батарей;
по заднему фронту внешнего сигнала, соответствующему окончанию первой однократной съемки, разрешают движение солнечных батарей независимо друг от друга в направлении уменьшения угла рассогласования, если угол рассогласования превышает угол торможения (αторм);
по заднему фронту внешнего сигнала, соответствующему окончанию второй и последующих однократных съемок, при условии, что к началу этих съемок движение солнечных батарей было завершено штатно, задается одновременное движение солнечных батарей в направлении уменьшения угла рассогласования солнечной батареи, если угол рассогласования хотя бы одной солнечной батареи превышает пороговое значение (αпор), а в случае, если Ти<Тнст, уменьшают значение порогового угла для начала движения солнечных батарей до величины большей суммы углов разгона (αразг) и торможения (αторм) и не превышающей величины угла движения солнечной батареи с фиксированной скоростью (ωф) за время 0,5 Ти, с учетом точностей определения угловой скорости и углового положения солнечной батареи;
если движение солнечных батарей прекратилось по переднему фронту внешнего сигнала принудительно и при этом угол торможения (αторм) не был достигнут, задают новое значение порогового угла (αн.пор)

если время после заднего фронта внешнего сигнала превысило минимальный интервал между сеансами (Тс), возвращаются к штатному движению солнечных батарей.
2. Способ управления системой ориентации солнечных батарей космического аппарата при съемке Земли, включающий:
задание штатного режима движения солнечных батарей с пороговым углом (αпор) начала движения солнечных батарей в направлении уменьшения текущего угла рассогласования (αсб), как угла между нормалью к рабочей поверхности солнечной батареи и проекцией единичного вектора направления на Солнце на плоскость вращения указанной нормали, равного

αф - угол между положениями нормали во время движения солнечных батарей с фиксированной скоростью,
Δαт - погрешность определения угла рассогласования,
αразг - угол разгона солнечной батареи
αторм - угол торможения солнечной батареи,
с прекращением движения при достижении углом рассогласования величины угла торможения, отличающийся тем, что:
определяют время движения солнечных батарей  ,
,
определяют время стабилизации положения космического аппарата (Тнст), при повороте солнечных батарей на пороговый угол (αпор)

tcтаб - длительность стабилизации положения космического аппарата от начала торможения солнечной батареи;
определяют режим съемок и сеансов путем измерения интервалов времени между однократными съемками (Ти), находящимися в диапазоне между минимальным (Tmin) и максимальным значениями (Tmax) и интервалов между сеансами (Тс) съемок по внешнему сигналу, состоящему из переднего и заднего фронта, по переднему фронту которого прекращается движение, а по заднему фронту которого разрешается движение солнечных батарей;
по заднему фронту внешнего сигнала, соответствующему окончанию первой однократной съемки, разрешают движение солнечных батарей независимо друг от друга в направлении уменьшения угла рассогласования, если угол рассогласования превышает угол торможения (αторм);
по заднему фронту внешнего сигнала, соответствующему окончанию второй и последующих однократных съемок, при условии, что к началу этих съемок движение солнечных батарей было завершено штатно на одном интервале между однократными съемками разрешают движение одной солнечной батареи, угол рассогласования которой больше угла рассогласования другой солнечной батареи и он превышает пороговое значение (αпор), а в случае, если Ти<Тнст, уменьшают значение порогового угла для начала движения солнечных батарей до величины более суммы углов разгона (αразг) и торможения (αторм) и не превышающей величины угла движения солнечной батареи с фиксированной скоростью (ωф) за время 0,5 Ти с учетом точностей определения угловой скорости и измерения углового положения солнечной батареи;
если время после заднего фронта внешнего сигнала превысило минимальный интервал между сеансами (Тс), возвращаются к штатному движению солнечных батарей.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2356788C1 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ ЭНЕРГОПИТАНИЯ СНАБЖЕННОГО СОЛНЕЧНЫМИ БАТАРЕЯМИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2665145C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| JP 6323367 B2, 16.05.2018 | |||
| EP 3919391 B1, 27.03.2024. | |||

