Изобретение относится к испытательной технике и может быть использовано при изучении механизма сцепления автомобильного колеса с поверхностью дороги.
Сцепление колеса с дорожным полотном зависит от большого числа различных факторов и в первую очередь от покрытия дороги и его состояния, от характера взаимодействия колеса с дорогой [1]. Сцепление колеса с дорожным покрытием зависит от состояния автомобильной шины, ее конструкции, материала или давления в ней воздуха, нагрузок на колесо, скорости движения и буксования колеса [2, 3] и характеризуется коэффициентом сцепления. При этом коэффициент сцепления подразделяется на коэффициент продольного сцепления φх при движении колеса с продольным скольжением и пробуксовыванием и коэффициент поперечного сцепления φy при движении колеса под углом к плоскости его качения, т.е. тогда, когда колесо одновременно и вращается, и скользит в боковом (поперечном)направлении.
Имеется большое количество разнообразных методов и приборов для экспериментального определения коэффициента сцепления, описание некоторых из них имеется в [4].
Устройства для определения продольного сцепления (коэффициент φх), как правило, представляют собой тележку, колеса которой и позволяют определить силу сцепления колеса с дорогой, примерами могут быть устройства по а.с. СССР №630982, №976778, №1033935, №1567917, №1604881, №1281960. В качестве аналогов устройств для экспериментального определения продольного коэффициента сцепления можно указать устройства по патентам Российской Федерации на изобретение №2112829, №2134415, №215633, №2211891 и другие.
Для устройств, применяемых для замера коэффициента поперечного сцепления, имеются свои особенности. Эти тележки воссоздают условия качения колеса при действии боковой силы, то есть имитируют явление заноса автомобиля без торможения. Более того, при боковых скольжениях колес принимают коэффициент поперечного сцепления

Тем самым, в настоящее время не имеется стендов (устройств), которые бы позволяли определять значения коэффициентов продольного и поперечного коэффициента сцепления колеса с полотном дороги. Тем самым, недостатком известных стендов и устройств, предназначенных для определения характеристик сцепления колеса с дорогой, является ограниченность их функциональных возможностей: они не позволяют проводить испытания при различных скоростях вращения колеса и различных состояниях дорожного полотна.
За прототип принят стенд для определения коэффициента сцепления колеса с дорожным покрытием по а.с. СССР №1151640 [5], содержащий станину, пневматическое колесо, размещенное на валу, связанное посредством системы передач с электродвигателем, тележку с динамометрическим и измерительным устройствами, установленными на станине, при этом вал колеса размещен на подвижной раме. Это устройство, как и аналоги, не позволяет определять в ходе испытаний коэффициенты продольного и поперечного сцепления, поскольку в устройстве имеется только одна измеряемая величина, которая определяет величину коэффициента продольного сцепления и которая характеризуется перемещением подпружиненной тележки под воздействием колеса. Устройство не позволяет определить закон изменения коэффициента сцепления колеса с полотном дороги от изменения скорости вращения колеса в процессе его торможения.
Цель изобретения - расширение функциональных возможностей устройства и области его применения, а также приближение условий испытания к реальным условиям эксплуатации.
Эта цель достигается тем, что устройство для определения коэффициентов сцепления дорожных покрытий с автомобильным колесом (коэффициент продольного сцепления и коэффициент поперечного сцепления) в лабораторных условиях содержит станину, пневматическое колесо, размещенное на силовом валу, который через шарнирную развязку состыкован с динамической платформой устройства, расположенной в роликовых направляющих. При этом роликовые направляющие закреплены на стойке, которая установлена на станине, а сама динамическая платформа заневолена от перемещений в роликовых направляющих датчиком силы, позволяющим определить силовое усилие, действующее по оси силового вала. В устройстве имеется тележка с установленным на ней электрическим двигателем, на оси которого укреплен диск с размещенным на нем образцом дорожного покрытия, а сама тележка установлена на полозьях с системой фиксации положения тележки относительно полозьев. Сами полозья, которые выполнены в виде жесткой силовой рамы, имеют возможность вращения в горизонтальной плоскости на оси, установленной на станине. Рама с полозьями имеет механизмы фиксации ее положения относительно плоскости станины, причем угловое положение полозьев относительно продольной оси станины позволяет имитировать угол увода колеса. Электрический двигатель имеет систему регулирования скорости вращения его выходного вала, причем плоскость опорного диска параллельна продольной оси силового вала колеса, а само устройство имеет измерительные датчики для определения таких кинематических характеристик пневматического колеса и диска, как их угловые скорости вращения, количество оборотов, совершаемых выходным валом электрического двигателя и пневматическим колесом.
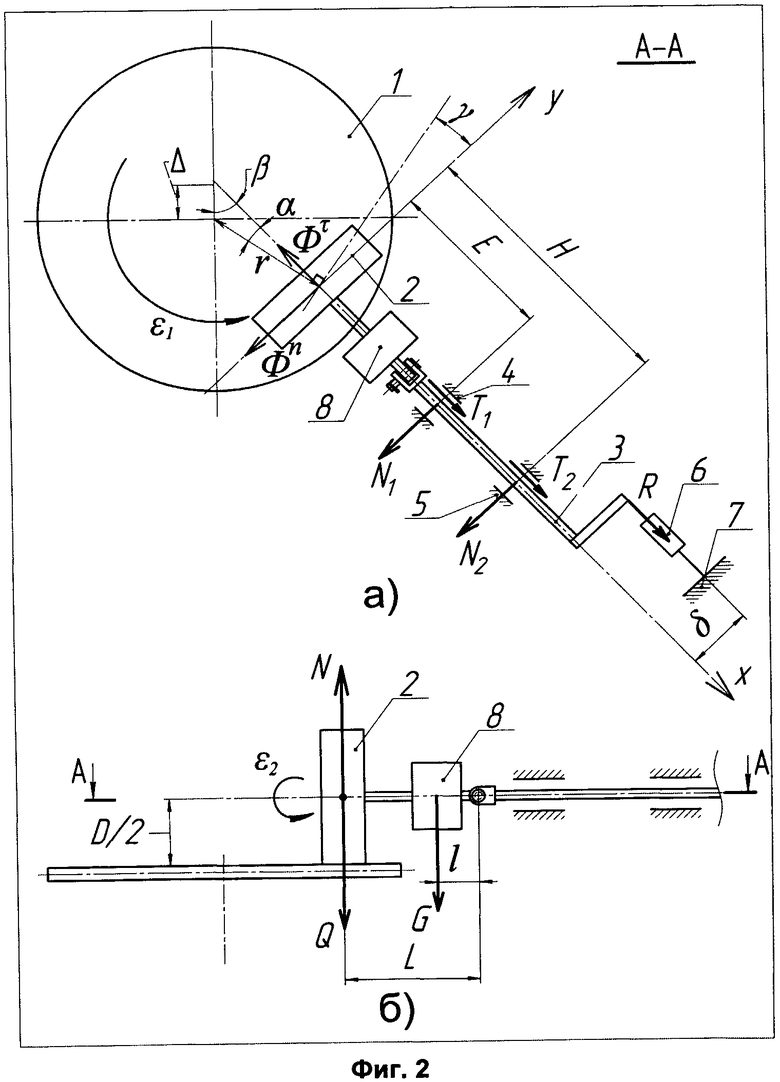
На фиг.1 изображено предлагаемое устройство.
Устройство содержит станину 1, тележку 2 с установленным в ней электрическим двигателем 3, причем тележка 2 выполнена в виде салазок, установленных на раме-полозьях 4, выполненных в виде силовой плоской рамы, которая может вращаться относительно оси 5 по плоскости станины 1. На выходном валу 6 электрического двигателя 3 установлен опорный диск 7, на котором закреплен образец 8 дорожного покрытия. Устройство содержит пневматическое колесо 9, установленное посредством подшипникового узла на силовом валу 10, имеющем шарнирную развязку 11, посредством которой силовой вал 10 закреплен на динамической платформе 12. Динамическая платформа 12 посредством направляющих роликов 13 закреплена на ползуне 14, посредством которого может перемещаться по стойке 15, причем устройство имеет механизм фиксации положения ползуна 14 на стойке 15, который не показан на фиг.1. Стойка 15 установлена и жестко закреплена перпендикулярно плоскости станины 1. Перемещения динамической платформы 12 по направляющим 13 ограничено датчиком усилия 16, для предварительного нагружения которого устройство имеет пружину 17. Устройство имеет систему управления работой электрического двигателя 3, которая на фиг.1 также не показана. Устройство снабжено стробоскопами 18 и 19 для определения угловой скорости вращения соответственно пневматического колеса 9 и опорного диска 7. Для моделирования силового воздействия пневматического колеса на дорожное полотно на силовом валу 10 закреплен груз 20.
Стенд работает следующим образом. Образец дорожного покрытия 8 закрепляют на диске 7. На силовой вал 10 устанавливают груз 20. Поворачивая на оси 5 раму-полозья 4 на угол α задают угол увода колеса 9 γ. Как следует из фиг.1, α=γ. Перемещая салазки 2 по полозьям 4, задают расстояние точки контакта колеса 9 с образцом дорожного покрытия. После этих операций стопорами, не показанными на фиг.1, фиксируется положение электрического двигателя 3 относительно полозьев 4, а положение рамы-полозьев относительно станины 1. После выполнения этих операций, устройство готово к работе. Далее колесо 9, поворачивая в вертикальной плоскости в шарнире 11 силовой вал 10, выводят из контакта с образцом 8. Включением электродвигателя 3 диск 7 приводят во вращение, разгоняя его до необходимой, например, максимальной скорости вращения, которая измеряется датчиком угловой скорости и количества оборотов вращения 18. Двигатель выключают, и колесо 9 посредством силового вала 10 опускают вниз до контакта пневматического колеса 9 с образцом 8, закрепленным на диске 7. За счет сил трения происходят раскручивание пневматического колеса 8 и торможение вращения диска 7. Значение сил трения определяется значением коэффициента продольного φх и поперечного φy сцепления пневматического колеса с образцом дорожного покрытия, которые зависят от скорости движения колеса (угловая скорость вращения) и угла увода. Поперечная сила сцепления, зависящая от коэффициента поперечного сцепления φy, вызывает усилия, действующие на динамическую платформу 12 и которые измеряются датчиком силы 16. Характеристики разгона колеса 9 и выбега ротора электрического двигателя 3 также зависят от значений коэффициентов продольного и поперечного сцепления. По замеренным датчиком 16 усилиям, по параметрам разгона колеса 9 и параметрам дальнейшего его торможения, по параметрам разгона ротора электрического двигателя 3 и характеристикам его выбега судят о коэффициентах продольного и поперечного сцепления.
Расчетная схема для определения коэффициентов продольного и поперечного сцепления приведена на фиг.2.
На фиг.2 позициями обозначено: 1 - опорный диск; 2 - пневматическое колесо; 3 - силовой вал; 4, 5 - направляющие динамической платформы; 6 - датчик силы; 7 - станина; 8 - груз.
В точке контакта колеса 2 с диском 1 возникают продольная и поперечная сила трения, соответственно Φτ и Φn. Основные расчетные размеры указаны на фиг.2, там же указаны реакции связей. В соответствии с законом Кулона-Амонтона [6] будем иметь

Из геометрических соображений, в соответствии с теоремой синусов, будем иметь
Из нижнего рисунка на фиг.2 будем иметь

Для верхнего рисунка будем иметь следующие уравнения равновесия
В системе (5) Т1 и Т2 - силы трения в роликовых направляющих динамической платформы. N1 и N2 - нормальные реакции в роликовых опорах. Обозначив коэффициент трения скольжения в роликовых опорах через k, получим

Из второго уравнения системы (5) получим

тогда из третьего уравнения системы (5) получим
а для N1 получим
Из первого уравнения системы (5) будем иметь

откуда получим

Определив из (4) значение N, для (11) получим

В уравнении (12) R - показания датчика силы. В уравнение (12) входят оба искомых коэффициента трения - φx и φy. Дополнительные уравнения для определения коэффициентов трения получим из уравнений движения опорного диска (1) и пневматического колеса (2).
Уравнение движения опорного диска (1) запишем в виде

где ε1 - угол поворота опорного диска (1);
I1 - момент инерции опорного диска;
Mmp1 - момент сопротивления (трение в подшипниковых узлах);
M1=Δsinβ·N·φy;
М2=rcosα·N·φx;
Δ, α, β, r - геометрические характеристики устройства.
Уравнение движения пневматического колеса будет иметь вид

где I2 - момент инерции пневматического колеса;
Mmp2 - момент сопротивления (трение в подшипниковых узлах);
ε2 - угол поворота пневматического колеса;
Изменение угловой скорости вращения опорного диска получим из уравнения (13)

где C1 - const интегрирования.
Полагая, что при отключенном электрическом двигателе 3 (фиг.1) в момент соприкосновения пневматического колеса 2 (фиг.2) с опорным диском 1 (фиг.2) угловая скорость вращения опорного диска равна ω0, получим С1=ω0I1.
Опорный диск 1 (фиг.2) после соприкосновения с ним пневматического колеса 2 (фиг.2) тормозится, а само пневматическое колесо раскручивается в соответствии с уравнением (14), из которого получим

где C2 - константа интегрирования.
Поскольку в начальный момент времени пневматическое колесо было неподвижным, то C2=0.
Через некоторое время линейные скорости в точке контакта опорного диска 1 и пневматического колеса 2 (фиг.2) сравняются. Равенство скоростей в точке контакта будет равно
Для определения времени t* выравнивания скоростей будем иметь

Угловую скорость  опорного диска 1 и угловую скорость пневматического колеса 2 (фиг.2)
опорного диска 1 и угловую скорость пневматического колеса 2 (фиг.2)  в момент выравнивания скоростей в точке контакта определим из уравнений (15) и (16)
в момент выравнивания скоростей в точке контакта определим из уравнений (15) и (16)


где t* - определяется из уравнения (18).
Кинетическая энергия в момент времени t* в системе будет равна

Кинетическая энергия W расходуется на работу по преодолению сил сопротивления

где  - угол проворота опорного диска;
- угол проворота опорного диска;
 - угол проворота пневматического колеса.
- угол проворота пневматического колеса.
 и
и  - углы проворота опорного диска и пневматического колеса с момента выравнивания скоростей до полной остановки опорного диска 1 и пневматического колеса 2 (фиг.2).
- углы проворота опорного диска и пневматического колеса с момента выравнивания скоростей до полной остановки опорного диска 1 и пневматического колеса 2 (фиг.2).
Из (17) получаем уравнение связи для углов поворота  и
и  .
.

Из уравнения (19)получим

а из (20) будем иметь
Тогда из уравнения (22) получим выражение для вычисления угла проворота опорного диска

Из уравнения (15) можно получить угол проворота опорного диска 1 (фиг.2)  до момента выравнивания скоростей опорного диска и пневматического колеса в точке контакта
до момента выравнивания скоростей опорного диска и пневматического колеса в точке контакта

Тогда общее количество оборотов, которое сделало опорное колесо до его полного останова, будет равно
В соответствии с фиг.1 параметр n1 может быть определен по показаниям датчика (18). Уравнение (28) и уравнение (12) позволяют определить значения коэффициентов трения φх и φy.
Как отмечается в [1], коэффициент поперечного и продольного сцепления зависят от скорости качения колеса по полотну дороги. Устройство, схема которого приведена на фиг.1, позволяет изучать изменения коэффициентов продольного и поперечного сцепления в зависимости от скорости качения колеса и угла его увода. Датчик силы позволяет в соответствии с уравнением (12) определить закон изменения комплекса коэффициентов трения системы от времени. Измеряя с помощью датчиков вращения 18 и 19 угловые скорости вращения и углы проворота соответственно опорного диска 7 и пневматического колеса 9 на фиг.1, можно поставить в соответствующие моменты времени измеренным кинематическим характеристикам опорного диска и пневматического колеса усилие R, что позволяет получить дополнительное уравнение для определения искомых параметров. При этом за основные показатели следует брать характеристики вращения опорного диска, а характеристики вращения пневматического колеса являются поверочными характеристиками, позволяющими оценить правильность проведенных измерений.
Таким образом, в отличие от прототипа предлагаемое устройство позволяет в одном эксперименте определить закон изменения коэффициента продольного и поперечного сцепления в зависимости от скорости качения пневматического колеса по опорному диску и в зависимости от угла увода колеса.
Литература
1. Иларионов В.А., Пчелин И.К., Калинин Е.И. Коэффициент сцепления шин с дорогой и безопасность движения. - Москва, МАДИ, 1989. - 77 с.
2. Петров М.П. Работа автомобильного колеса в тормозном режиме // Зап. Сиб. книжн. изд-во, Омское отделение, 1973. - 123 с.
3. Порожняков B.C. Оценка сцепления шин с автомобильными покрытиями. - М.: Высшая школа, 1967. - 71 с.
4. Березуев М.Н., Кузнецов Н.П., Соловьев С.М., Юртиков Р.А. Моделирование при реконструкции механизма столкновения автомобиля с преградой. - Москва - Ижевск: НИЦ «Регулярная и хаотическая динамика», 2005. - 208 с.
5. Стенд для определения коэффициента сцепления дорожных покрытий в лабораторных условиях. / Авторское свидетельство №11516440, КПИ Е01С 23/07 // Малышев А.А., Христолюбов Н.Н., Опубл. 23.04.85 Вып. №15.
6. Добронравов В.В., Никитин Н.Н. Курс теоретической механики: Учебник для машиностр. спец. вузов. - 4-е изд., перераб. и доп. - М.: Высш. школа, 1983, 575 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ДОРОЖНЫМ ПОКРЫТИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2566178C1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Способ определения коэффициента поперечного сцепления эластичной шины автомобильного колеса | 2017 |
|
RU2661555C1 |
| Стенд для исследования физических процессов в пятне контакта пневматической шины с дорогой | 1976 |
|
SU875239A1 |
| МОДЕРНИЗИРОВАННЫЙ СТЕНД ОСИПОВА ДЛЯ ДИАГНОСТИРОВАНИЯ ТОРМОЗОВ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2545531C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| Тележка гусеничная сменная для трактора | 2017 |
|
RU2658505C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| Способ управления агрегатом при работе на склонах | 1988 |
|
SU1782373A1 |
Изобретение относится к испытательной технике и может быть использовано при изучении механизма сцепления автомобильного колеса с дорожным полотном. Пневматическое колесо установлено в подшипниковом узле на консольном валу, имеющем шарнирную опору, позволяющую вводить пневматическое колесо в сцепление за счет сил трения с опорным диском, на котором размещен образец дорожного покрытия. Опорный диск раскручивается с помощью электрического двигателя, на оси которого он жестко закреплен. Угол увода пневматического колеса моделируется путем углового смещения центра опорного диска относительно продольной оси консольного вала, а скорость движения колеса моделируется угловой скоростью вала электрического двигателя. Силовое воздействие сил сцепления колеса с опорным диском, воспринимаемое консольным валом, измеряется датчиком силы. Силы сцепления определяют процессы разгона и выбега пневматического колеса и опорного диска, поэтому для определения кинематических характеристик вращения пневматического колеса и опорного диска в устройстве имеются датчики измерения этих характеристик. По кинематическим характеристикам вращения опорного диска и пневматического колеса, по величине силового воздействия на консольный вал судят о величине коэффициента продольного и коэффициента поперечного сцепления пневматического колеса с дорожным полотном. Технический результат - расширение функциональных возможностей устройства и области его применения, а также приближение условий испытания к реальным условиям эксплуатации. 2 ил.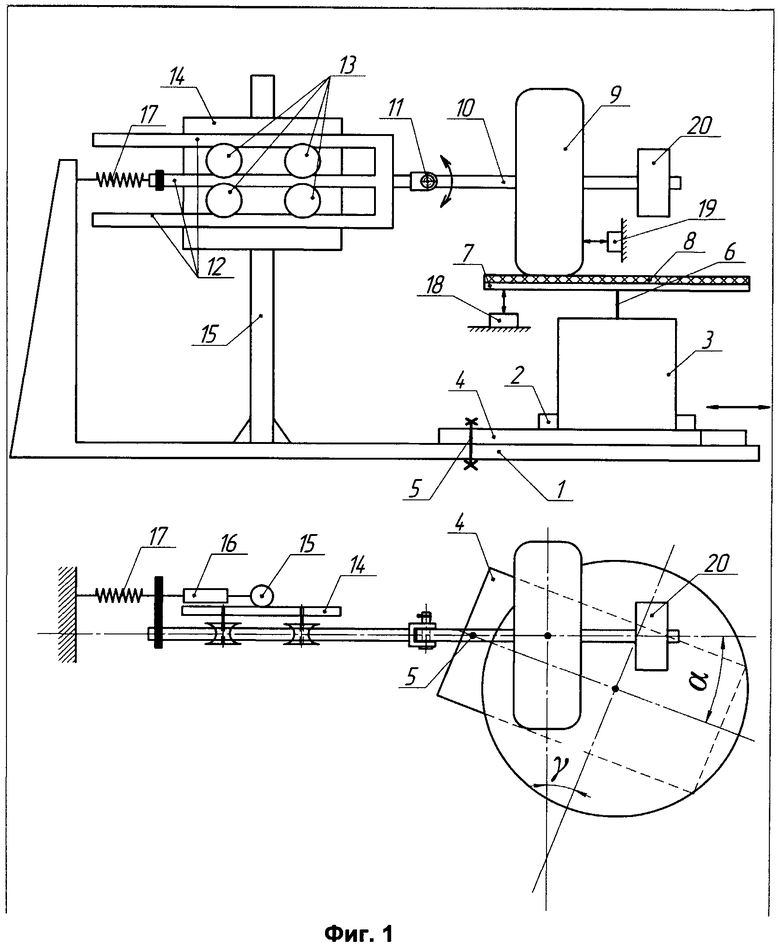
Устройство для определения сцепных свойств колеса с дорожным покрытием в лабораторных условиях, содержащее станину, пневматическое колесо, размещенное посредством подшипникового узла на силовом валу, тележку с электрическим двигателем, силоизмерительный датчик, датчики угловых скоростей вращения пневматического колеса и выходного вала электрического двигателя, отличающееся тем, что для определения коэффициента продольного сцепления колеса с дорогой и коэффициента поперечного сцепления силовой вал с размещенным на нем пневматическим колесом через шарнирную развязку в вертикальной плоскости закреплен на динамической платформе устройства, представляющей собой трубчатый каркас, размещенный в роликовых направляющих, расположенных в вертикальной плоскости на ползуне, имеющем возможность перемещения по стойке устройства, которая закреплена в устройстве перпендикулярно плоскости станины, а сам ползун имеет элементы фиксации его положения на стойке устройства, при этом динамическая платформа заневолена от перемещений в направляющих датчиком силы, позволяющим определить силовое усилие, действующее на динамическую платформу от сил сцепления пневматического колеса с опорным диском, установленным на оси электрического двигателя, причем на диске закреплен образец дорожного покрытия, а тележка, на которой установлен двигатель, закреплена на полозьях с системой фиксации положения тележки относительно полозьев, которые выполнены в виде жесткой силовой рамы, имеющей возможность вращения в горизонтальной плоскости на оси, установленной на станине, причем рама с полозьями имеет механизмы фиксации ее положения относительно плоскости станины, а угловое положение полозьев относительно продольной оси станины позволяет имитировать угол увода колеса, при этом электрический двигатель имеет систему регулирования скорости вращения его выходного вала, а плоскость опорного диска параллельна продольной оси силового вала, а само устройство имеет измерительные датчики для определения кинематических характеристик пневматического колеса и опорного диска.
| Стенд для определения коэффициента сцепления дорожных покрытий в лабораторных условиях | 1983 |
|
SU1151640A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ДОРОЖНЫМ ПОКРЫТИЕМ | 2002 |
|
RU2211891C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ АЭРОДРОМНОГО И ДОРОЖНОГО ПОКРЫТИЯ | 1997 |
|
RU2134415C1 |
| Устройство для обнаружения состояния "трубка снята" на параллельном телефонном аппарате | 1987 |
|
SU1555905A1 |
| US 5187997 A, 23.02.1993. | |||

