Изобретение может быть использовано для повышения экономичности работы, плавности и устойчивости хода мобильных машин.
Известен способ управления агрегатом при работе на склонах, включающий формирование траектории, регулирование скорости, выравнивание опорных реакций, торможение и согласование процессов управления.
Однако при таком способе управления недостаточны плавность и устойчивость хода.
Целью изобретения является повышение эффективности работы
Поставленная цель достигается тем, что выравнивание опорных реакций производят энергией торможения путем подачи выхлопных газов в баллон и повышением давления, затем выхлопные газы подают в подвески до подъема и поворота рамы, а после достижения заданного положения
при движении поперек склона измеряют угол поворота направляющих колес, регулируют соотношение давлений воздуха в шинах и уменьшают угол поворота колес до нуля, при этом в процессе работы при снижении давления газов при каждом торможении сначала повышают давление выхлопных газов в баллоне.
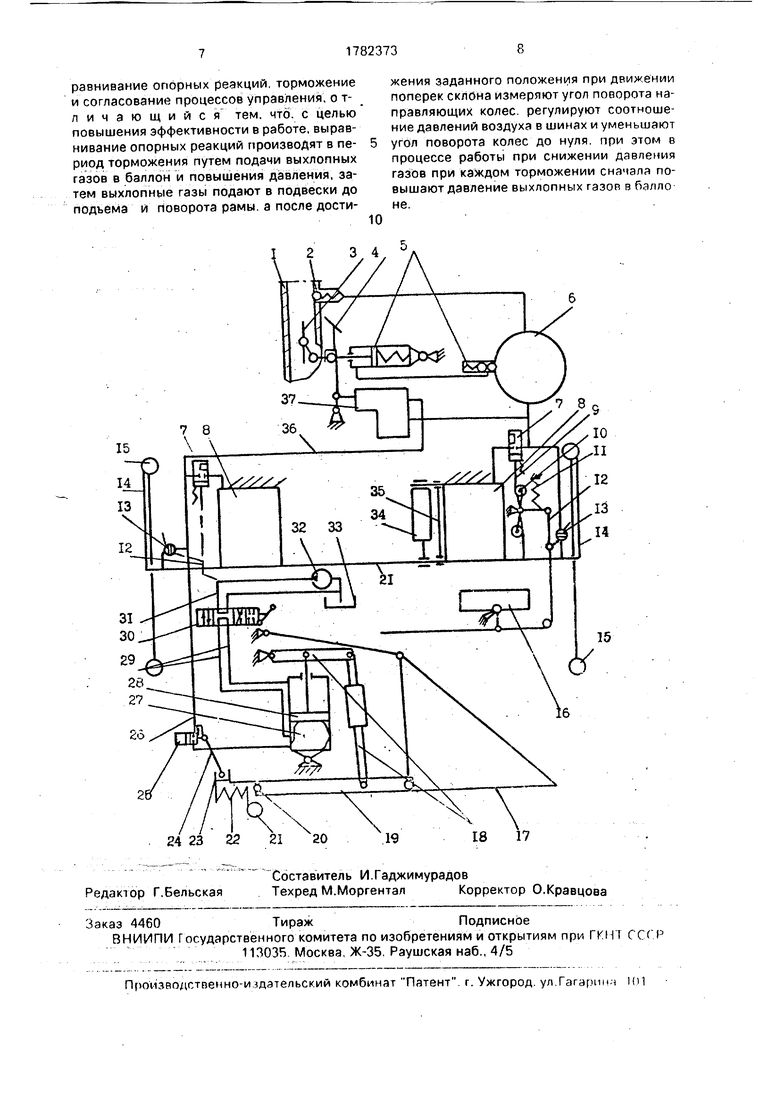
На чертеже изображена схема системы реализации способа.
Система включает выхлопной коллектор 1 двигателя с клапаном 2 и заслонкой 3, управляемой педалью 4 и регулятором 5 давления газов в баллоне б, краны (распределители) 7 управления пневмокамерами 8 подвесок, тяги 9, пропущенные через ролики регулятора 10 высоты бортов в отдельно сти и вместе с пружинами 11 и тягой 12 с возможностью поддержания заданной вы соты бортов в зависимости от нагрузки и угла склона, краны 13 в линии 14 регулиро вания давления и разности давлений и рэ
XJ
00
ю
W
XI ы
диусов качения колес 15 по сигналу поворотного сиденья 16с фиксатором или иного датчика крена рамы; орудие 17, связанное с трактором механизмом навески 18, тяги 19 которого соединены шарнирами 20 с осью 21 через упругое звено (пружину) 22 датчика силового регулирования с возможностью передачи сигнала тягой 23 и рычагом 24 пневмораспределителя 25 в линии 26 питания пневмокамеры 27 в полости подъема гидроцилиндра 28, связанного с гидролинией 29 распределителя 30, линией 31 насоса 32 и бака 33 гидравлической системы трактора. Подвеска имеет амортизатор 34, реактивные штанги 35. Пневмолиния 36 управления навесным орудием и подвесками соединена с тормозным краном 37, баллоном 6 и выхлопным коллектором 1. Тормоза, привод ведущих колес, рулевое управление, двигатель, трубки связи и другие элементы аналогичны известным.
Выхлопной коллектор 1 способен отводить газы через клапан 2 в баллон 6 пнев- мопитания тормозов. Это может преобразовать двигатель в источник давления газов и утилизатор энергии пневматического торможения. Распределители 7, камеры 8, тяга 9, регуляторы 10 с тягами 12, краны 13 и сиденье 16 могут регулировать высоту и угловое положение рамы, изменять давление и разность давлений газов, работать в качестве средств регулирования высоты, энергоаккумулятора, стабилизатора опорных реакций, нагрузок колес и радиусов их качения. При этом кранами 13 можно регулировать давление в шинах 15 вместе и в отдельности, разность радиусов качения колес, компенсировать увод вниз по склону и снизить угол поворота колес до нуля, Сиденье 16 может регулировать разность давлений в подвесках и угловое положение рамы. При движении по чистому склону сиденье 16 можно фиксировать в нужном положении. Навесное орудие 17 и механизм навески 18 имеют гидравлический и пневматический приводы одновременно. Возможны другие методы повышения сжимаемости и упругости управления. Пневмосистема может содержать преобразователь низкого давления газов в высокое и работать в качестве гидрогазового аккумулятора. Поэтому можно регулировать догрузку ведущих колес без ограничения функций гидросистемы. Амортизаторы 34 и штанги 35 облегчают работу оси 21 при воздействии сил и реакций в различных условиях работы.
Предлагаемый способ управления осуществляется следующим образом.
Отработанные газы двигателя из выхлопного коллектора 1 через клапан 2 после закрытия заслонки 3 педалью 4 или регулятором 5 давления поступают в баллон 6 и
через распределители 7 в пневмокамеры 8 правого и левого бортов, поднимая раму до запирания распределителями 7 камер 8. Длину тяг 9 и высоту бортов изменяют регулятором 10. При повороте рычага с ролика0 ми регулятора вправо длина тяг 9 и высота бортов возрастает, рама поднимается, а при повороте влево опускается. Регуляторы 10 правого и левого бортов взаимосвязаны, и сиденье 16 поворотом регулирует разность
5 давлений газов в камерах 8 и угловое положение рамы. Водитель, наклоняя тело аналогично мотоциклисту, поворачивает сиденье 16. В период поворота вправо давление в камере левого борта возрастает, а в
0 камере правого снижается. Поэтому левый борт рамы поднимается, а правый опускается до выравнивания (устранения крена). При движении поперек правого склона правое колесо опускается, а левое поднимается. В
5 каждом случае искривление позвоночника водителя исключается и рама выравнивается регулированием разности давлений в камерах 8, нагрузок и радиусов качения колес бортов. Кранами 13 в линиях 14 регулируют
0 давление в шинах с учетом нагрузки и разность давлений до устранения увода от прямолинейного движения и горизонтали склона путем регулирования разности скоростей бортов (радиусов качения) без по5 стоянного регулирования разности частот вращения колес и поворота направляющих колес вверх по склону. При повышении давления и радиуса качения колес правого борта агрегат удерживается от увода в правую
0 сторону, и, наоборот, увеличением давления и радиуса левого колеса компенсируется увод в левую сторону. В каждом случае регулирование давления и радиусов осуществляют согласованно с выравнивани5 ем рамы склонохода или в период его поворота. Согласование процессов выравнивания рамы с регулированием разности радиусов качения производят вручную или соединением тяг 12 с кранами 13, как это
0 показано пунктиром,
Поворотное сиденье 16 можно отключить и установить датчик для автоматического управления. В любом случае регулирование радиусов качения и пырав5 нивание осуществляют согласованно, как правило, в период поворота эгрегагз на поперечном склоне. При движении агрегата реверсивного типа без поворота е конце гона такое управление после каждого прохода не требуется, так как исключается. Тяга 23 рычагом 24 перемещает золотник распределителя 25 вправо при повышении силы тяги и сжатия пружины 22 для повышения давления в камере 27 при догрузке и силовом регулировании. При снижении сопротивления пружина 22 перемещает золотник влевб. Камеры 8, 27 поддерживают давление, пропорциональное силе тяжести, и работают в качестве газовых и грузовых аккумуляторов одновременно. Поэтому выравнивание рамы возможно и при неработающем двигателе. Регулирование опорных реакций колес правого и левого бортов способствует изменению радиусов качения, так как по мере разгрузки нижнего колеса и повышения давления газов однозначно увеличивают радиус качения и скорость нижнего борта и компенсирует увод вниз.
Основой закономерного согласования процессов выравнивания опорных реакций и радиусов качения колес первого и второго бортов является взаимосвязь параметров между собой и с внешними условиями:
о (П - га) - А V а) А г В // g/V
В /г gl р/л R of Vi (1 ± di) - Vi (1 ± &) V R/B , А г n - гг ,
где , п, гз - угловая скорость и радиусы качения колес;
А V - разность скоростей бортов;
В, fi - ширина колеи и коэффициент сцепления колес с почвой;
g - ускорение свободного падения;
V - скорость движения агрегата;
i - коэффициент, характеризующий форму траектории поворота;
/3 - угол крутизны склона; тг 3,14;
R, а) - радиус поворота и угловая скорость выравнивания рамы;
Vi, V - скорости движения бортов;
(5i, 62 - соответственно коэффициенты буксования (со знаком минус) и скольжения движителей (со знаком плюс).
Согласование процессов регулирования разности давлений и радиусов качения колес с углом поперечного склона ocyufecr- вляют исходя из условий устойчивого движения по горизонтали чистого склона без поворота направляющих колес, т.е. исключается дополнительное сопротивление движению ведущих колес. При этом частота и сумма времени-угла поворота вправо и влево при прямолинейном движении по горизонтали склона характеризуется следующим:
/ «к dt ; /Ida,
где ti, t2, T - время поворота колес;
«1 , «2 ,о - угол поворота.
Курс нужно стабилизировать корректированием координат силы сопротивления до выравнивания буксований; радиусы качения - до нейтрализации направляющих колес. а скорости бортов - рулем и по сигналу направляющих колес при минимальном их сопротивлении от поворота.
Симметричное нагружение бортов силами сопротивления и тяжести до выравнивания буксований и регулирование радиусов качения движителей до равенства нулю среднего значения п оворота направляющих колес вправо и влево при движении поперек склона являются исходными для
регулирования скоростей вращения движителей без торможения бортов при эконо- -мичном регулировании параметров траектории.
Накопление энергии при торможении в
потребителях энергии исключает непрерывную работу насосов и отбор мощности в рабочем режиме и при перегрузке. При движении без подвода энергии возможно выравнивание опорных реакций за счет
использования остаточного давления в камерах подвески до опускания рамы вниз и повышения устойчивости путем снижения центра масс-.
Работа подвески, стабилизатора, силового регулятора и догружатёля ведущих колес без затрат энергии и аварийных обстоятельств на своей остаточной энергии, т.е. выпуском газов одной камеры в атмосферу при отсутствии подвода газов в камеры другого борта, также обеспечивает выравнивание опорных реакций. Постепенное снижение центра масс (рамы) при таком управлении достигает границ, когда давление начинает уменьшат&сяТ регулятор давления газов в баллоне закрывает заслонку 3 до восстановления и регулирует положение На основе взаимосвязи процессов выравнивания опорных реакций, регулирования радиусов качения колес и скоростей на
Склоне оптимально можно настроить агрегат, снизить число управляющих действий, потери энергии усилителями, колесами и тормозами. Это, а также использование энергии торможения повышает эффектипность работы в различных условиях. Формула изобретения Способ управления агрегатом при раРю те на склонах, включающий формировании траектории, регулирование скорости, аы
равнивание опорных реакций, торможение и согласование процессов управления, о т- личающийся тем. что. с целью повышения эффективности в работе, выравнивание опорных реакций производят в период торможения путем подачи выхлопных газов в баллон и повышения давления, затем выхлопные газы подают в подвески до подъема и поворота рамы а после достижения заданного положения при движении поперек склона измеряют угол поворота направляющих колес регулируют соотношение давлений воздуха в шинах и уменьшают угол поворота колес до нуля, при этом в процессе работы при снижении давления газов при каждом торможении сначала повышают давление выхлопных газов в баяло не.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением агроробота | 1986 |
|
SU1551263A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗАМИ ТРАНСПОРТНОГО СРЕДСТВА С ПНЕВМАТИЧЕСКОЙ ПОДВЕСКОЙ | 1991 |
|
RU2022822C1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
Сущность изобретения: силовое регулирование орудия, перераспределение опорных реакций между колесами и опорами орудия, выравнивание опорных реакций ведущих колес правого и левого бортов на поперечном склоне, регулирование плавности хода, дорожного просвета и давления в шинах колес с учетом нагрузки и разности давлений и радиусов качения до компенсации отклонения от курса осуществляют давлением выхлопных газов. Параметры согласовывают с торможением в границах изменения при движении в гоне. В конце гона пневмоуп- равление переключают на гидравлическое. Давление в пневмокамерах подвески, шин, гидроцилиндра и в баллоне используют для взаимопитания. Функции исполнительных элементов и энергоаккумуляторов совмещают при утилизации энергии выхлопных газов. Выравнивание опорных реакций и регулирование разности радиусов качения колес согласовывают. 1 ил.
24 23 22 21 20
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
