Изобретение относится к медицинской технике и может быть использовано для осуществления неинвазивной абляции и термической и термомеханической деструкции ограниченных областей внутри биологических тел с неоднородной структурой и других диэлектрических тел с потерями.
В кардиологии известен способ радиочастотной абляции [1], когда с помощью катетера, введенного в камеру сердца, подводится электромагнитное поле высокой частоты (f=1…500 МГц) для осуществления термического воздействия на определенные участки внутренней поверхности сердца с целью блокады проведения электрического импульса через эти участки. Одним из недостатков данного метода является сложность и травмоемкость введения катетера в камеру сердца и необходимость высокоточного позиционирования электродов катетера в требуемой области сердца. Для этих целей обычно используется параллельная компьютерная томография, в результате чего пациент получает значительные дозы рентгеновского излучения. Часто требуется проведение абляции на внешней поверхности сердца со стороны эпикарда, что требует выполнения еще более трудоемкой и небезопасной для пациента процедуры.
В медицине существует также проблема разрушения (термического выжигания) определенных участков тканей различных органов без хирургического вмешательства, когда отсутствуют возможности подведения катетера без существенных хирургических процедур, как, например, коагуляция опухоли внутренних органов, устранение кальцеобразных и иных образований в сосудах, печени, почках, мочевом пузыре и пр.
В технических задачах часто возникает потребность термической или термомеханической деструкции различных дефектных образований внутри объемов со сплошным заполнением. Например, при контроле внутренней части линзовых антенн и устранении дефектов внутри них. Аналогичная проблема возникает при контроле качества и устранения дефектов в изделиях из высококачественного бетона, пластмассы и пр.
Используемые для этих задач методы неразрушающего контроля с помощью ультразвуковых (УЗ), электромагнитных (ЭМ) полей и рентгеновского излучения первоначально позволит решить лишь первую часть задачи, а именно - определить локализацию дефектов или вредных образований, но не позволяют устранить эти дефекты и образования без существенного вмешательства в соседние области. Так, известен способ [2, 3] ультразвуковой эхоскопии для обнаружения и визуализации структурных изменений в тканях биологических органов и в диэлектрических средах различных изделий.
В настоящее время разработаны УЗ аппараты для неинвазивной абляции опухолей в урологии и гинекологии [4, 5], печени, молочных желез, костей и мягких тканей, почек и др. [6]. В этих аппаратах с целью концентрации поля используется способ фокусировки УЗ излучения с помощью отражателей, линз и управляемых фазированных решеток [2, 3]. Аналогичные способы концентрации ЭМ поля используются и в радиотехнике, в частности, в антенной технике [7].
Основным недостатком известных способов [2, 3] является недостаточная пространственная концентрация УЗ и ЭМ полей в требуемых объемах тела. Используемые для фокусировки линзы или отражатели [8] позволяют получить высокую концентрацию ЭМ и УЗ поля в фокальной точке однородных сред в плоскости, перпендикулярной фокальной оси, и значительно меньше в направлении фокальной оси. Кроме того, в этих способах невозможна фокусировка в неоднородных (нерегулярных) средах с недостаточно известными или неизвестными параметрами неоднородности, и, как следствие этого, невозможно управление положением фокуса, а следовательно, и невозможна фокусировка поля в заданную точку неоднородной (нерегулярной) среды.
В [9] изложен метод неинвазивной абляции в кардиологии с помощью применения рентгеновского излучения, позволяющий получить высокую степень концентрации рентгеновского излучения в требуемой точке. Однако очевидны и недостатки этого метода, связанные со значительными дозами облучения, получаемые пациентом при абляции сердца.
Из-за наличия неоднородностей облучаемой структуры импульсными сигналами УЗ поля возникают побочные отражения зондирующих импульсов от этих неоднородностей, занимающих вместе с главными отраженными импульсами практически весь интервал временных задержек, существенно ухудшающих точность фокусировки и степень концентрации поля в фокальном пятне и увеличивающих уровень облучаемого поля в остальной области [10].
Кроме того, изложенные выше способы позволяют получить лишь хорошее двумерное пространственное разрешение в трехмерном пространстве изображений, а использование для пространственного разрешения импульсного режима облучения приводит к дополнительному искажению двухмерного изображения из-за частотной зависимости формы диаграммы направленности АР. Кроме того, при перемещении (сканировании) сфокусированного луча как вдоль продольной оси, так и в плоскости поперечного сечения антенны существенно меняются размеры фокального пятна. Кроме того, т.к. облучаемая структура в общем случае является неоднородной и параметры ее неоднородности неизвестны, то это приводит к дополнительным погрешностям в фокусировке, уменьшению плотности потока мощности поля в фокусе и размыванию фокальной области. Дополнительная «размытость» фокусированной области возникает также при возможном перемещении структуры в пространстве. Кроме того, из-за наличия неоднородностей облучаемой структуры импульсными сигналами УЗ поля возникают побочные отражения зондирующих импульсов от этих неоднородностей, занимающих вместе с главными отраженными импульсами практически весь интервал временных задержек, существенно ухудшающих точность фокусировки и степень концентрации поля в фокальном пятне и увеличивающих уровень облучаемого поля в остальной области [10].
Предложенный в [11] метод многомодовой фокусировки продольных и поперечных УЗ волн с использованием управляемого амплитудного и фазового излучения отдельных излучателей ФАР с целью взаимной компенсации фаз продольных и поперечных волн непригоден для неинвазивной УЗ абляции в кардиологии, т.к., во-первых, имеет ограничение по частоте УЗ поля 100…400 кГц, при котором размер фокального пятна превышает минимально требуемый для абляции размер в 3 мм. Во-вторых, при абляции в кардиологии практически отсутствуют поперечные УЗ волны. Кроме того, в УЗ абляции в кардиологии требуемые для фокусировки амплитудно-фазовые распределения в этом методе предлагается определять на основе компьютерного моделирования процесса распространения УЗ волн в существенно неоднородной и нерегулярной среде биологической ткани, при этом необходимые для моделирования параметры ткани должны быть получены из анализа УЗ исследования ткани уже сфокусированным лучом. Подобная задача является некорректной в своей постановке, ее решение является неустойчивым и плохо сходящимся даже для неменяющегося во времени биологическою объема и вряд ли может быть получено в разумный для медицинских исследований временной интервал. Кроме того, не все необходимые для моделирования параметры ткани могут быть определены при УЗ и даже других дополнительных (магнитно-ядерных или рентгеновских) томографических исследований, методы и аппаратные средства которых изложены в [12, 13, 14, 15] при использовании последних в качестве дополнительных средств для осуществления абляции. Кроме того, временное изменение положений биологической ткани (в кардиологии это - биение сердца) не позволяет предлагаемый в [11] метод фокусировки использовать для неинвазивной абляции в кардиологии.
Кроме того, рекомендации по осуществлению неинвазивной абляции и деструкции с помощью ЭМ или УЗ полей существуют независимо как для ЭМ, так и УЗ поля. При этом нет четких рекомендаций по выбору размеров ФАР, используемых для абляции и деструкции. В то же время существуют общие (принципиальные) закономерности в выборе типа поля для целей неинвазивной абляции и деструкции, а также в выборе целесообразной частоты поля и минимальных размеров ФАР, при которых обеспечиваются технология неинвазивной абляции и деструкции строго в ограниченной области.
Наиболее близким к заявленному изобретению является способ и устройство [16], в котором для селективной деструкции клеток опухоли фокусировка УЗ поля осуществляется с помощью фазированных антенных решеток (АР). Указанный способ включает выбор и расположение излучателей УЗ поля по ограниченной незамкнутой поверхности, формирование временных импульсов сигнала, фазирование, фокусировку, излучение и управление сфокусированным полем в пределах биологического или иного диэлектрического объекта, прием каждым из излучателей АР отраженного поля и последующую обработку сигналов. Однако изложенный способ позволяет получить лишь хорошее двумерное пространственное разрешение в трехмерном пространстве изображений, а использование для пространственного разрешения импульсного режима облучения приводит к дополнительному искажению двухмерного изображения из-за частотной зависимости формы диаграммы направленности АР. Кроме того, при перемещении (сканировании) сфокусированным лучом как вдоль продольной оси, так и в плоскости поперечного сечения антенны существенно меняются размеры фокального пятна. Поскольку облучаемая структура в общем случае является неоднородной и параметры ее неоднородности неизвестны, то это приводит к дополнительным погрешностям в фокусировке, уменьшению плотности потока мощности поля в фокусе и размыванию фокальной области. Дополнительная «размытость» фокусированной области возникает также при возможном перемещении структуры в пространстве.
Технической задачей данного изобретения является создание способа и устройства, обеспечивающих оптимальную фокусировку в заданной точке, минимальный размер фокального пятна и максимальная концентрация и точность фокусировки УЗ или ЭМ поля в данной области биологического или иного диэлектрического объекта с неизвестной или недостаточно известной неоднородной структурой при обеспечении минимально допустимой концентрации поля вне заданной области фокального пятна, сохранение высокой концентрации и точности фокусировки при временном перемещении рассматриваемого участка объекта, выбор оптимального частотного диапазона и типа поля, электромагнитного или УЗ, размера и геометрии ФАР, подаваемой мощности. Тип излучаемого поля осуществляется по минимальному значению коэффициента потерь внутри облучаемого объекта.
Поставленная задача достигается тем, что в способе неинвазивной абляции и деструкции участков диэлектрического тела с потерями, заключающемся в том, что диэлектрическое тело размещают внутри отражающего экрана, воздействуют на выбранный участок диэлектрического тела излучением соответствующей интенсивности и частоты с помощью излучателей, размещенных на отражающем экране таким образом, что максимумы их диаграмм излучения направлены внутрь объема, ограниченного указанным отражающим экраном, фокусируют излучения от излучателей последовательно на соответствующих точках выбранного участка диэлектрического тела, в котором необходимо провести процедуру абляции и деструкции, согласно изобретению предварительно перед размещением диэлектрического тела внутри отражающего экрана, внутрь объема, ограниченного отражающим экраном, помещают объемный поглотитель, возбуждают каждый из излучателей излучением малой мощности с длиной волны λС=2rФ, где rФ - заданный радиус фокального пятна, λС - длина волны поля в диэлектрике без потерь, и настраивают каждый излучатель на режим бегущей волны, удаляют объемный поглотитель, затем производят настройку излучателей на выбранные точки фокусировки, для чего возбуждают первый излучатель сигналом с произвольной амплитудой  и фазой
и фазой  где
где  - радиус-вектор первой точки фокусировки относительно начала выбранной системы координат, запоминаем амплитуды
- радиус-вектор первой точки фокусировки относительно начала выбранной системы координат, запоминаем амплитуды 
 и фазы
и фазы 
 соответственно падающего излучения и излучения, отраженного от участка воздействия на диэлектрическом теле, затем при возбужденном первом излучателе возбуждают второй излучатель сигналом с произвольной комплексной амплитудой
соответственно падающего излучения и излучения, отраженного от участка воздействия на диэлектрическом теле, затем при возбужденном первом излучателе возбуждают второй излучатель сигналом с произвольной комплексной амплитудой  измеряют амплитуду
измеряют амплитуду  и фазу
и фазу  излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны
излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны  до выполнения соотношений:
до выполнения соотношений: 
 где ∗ - знак комплексного сопряжения, А2 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду
где ∗ - знак комплексного сопряжения, А2 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду 
 и фазу
и фазу  падающей волны, после этого при возбужденных первом и втором излучателях возбуждают третий излучатель сигналом с произвольной амплитудой
падающей волны, после этого при возбужденных первом и втором излучателях возбуждают третий излучатель сигналом с произвольной амплитудой  и фазой
и фазой  измеряют амплитуду
измеряют амплитуду  и фазу
и фазу  излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны
излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны  до выполнения соотношений:
до выполнения соотношений: 
 где A3 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду
где A3 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду  и фазу
и фазу  падающей волны, далее последовательно возбуждают аналогичным образом остальные излучатели, подстраивая амплитуды и фазы падающей волны до выполнения соответственно соотношений:
падающей волны, далее последовательно возбуждают аналогичным образом остальные излучатели, подстраивая амплитуды и фазы падающей волны до выполнения соответственно соотношений: 
 j=4…n, где n - общее количество излучателей, Aj - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду
j=4…n, где n - общее количество излучателей, Aj - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду  и фазу
и фазу  падающей волны, проверяют местонахождение заданной точки фокусировки относительно выбранного участка диэлектрического тела и при отрицательном результате процедуры фокусировки излучателей повторяют заново, при положительном результате производят запись параметров фокусировки - амплитуду и фазу каждого из излучателей, далее осуществляют процедуры фокусировки всех излучателей для заданного количества М точек фокусировки на участке воздействия на диэлектрическом теле и запоминание параметров фокусировки, при расположении точки М' абляции и деструкции вне М точек фокусировки и находящихся в области тетраэдра, вершины которого совпадают с координатами
падающей волны, проверяют местонахождение заданной точки фокусировки относительно выбранного участка диэлектрического тела и при отрицательном результате процедуры фокусировки излучателей повторяют заново, при положительном результате производят запись параметров фокусировки - амплитуду и фазу каждого из излучателей, далее осуществляют процедуры фокусировки всех излучателей для заданного количества М точек фокусировки на участке воздействия на диэлектрическом теле и запоминание параметров фокусировки, при расположении точки М' абляции и деструкции вне М точек фокусировки и находящихся в области тетраэдра, вершины которого совпадают с координатами 


 ближайших к точке М', причем расстояние от точки М' до точек с координатами
ближайших к точке М', причем расстояние от точки М' до точек с координатами  является наименьшим среди всех возможных точек m=1…М, определяют и записывают их комплексные амплитуды
является наименьшим среди всех возможных точек m=1…М, определяют и записывают их комплексные амплитуды  путем интерполяции:
путем интерполяции:



где  ,
,  ,
,  - радиус-векторы соответствующих точек;
- радиус-векторы соответствующих точек;  - расстояние между точками m3 и m2;
- расстояние между точками m3 и m2;  - расстояние между точками m3 и М''';
- расстояние между точками m3 и М''';  - расстояние между точками m1 и М''';
- расстояние между точками m1 и М''';
 - расстояние между точками m1 и М'';
- расстояние между точками m1 и М'';  - расстояние между точками m4 и М'',
- расстояние между точками m4 и М'',  - расстояние между точками m4 и М'; после чего увеличивают мощность излучения до величины, необходимой для осуществления абляции и деструкции в указанной области и безвредной вне указанной области, и осуществляют абляцию и деструкцию в указанных точках, при этом радиус кривизны а отражающего экрана выбирают из условии
- расстояние между точками m4 и М'; после чего увеличивают мощность излучения до величины, необходимой для осуществления абляции и деструкции в указанной области и безвредной вне указанной области, и осуществляют абляцию и деструкцию в указанных точках, при этом радиус кривизны а отражающего экрана выбирают из условии  , где a
диэл - радиус диэлектрического тела;
, где a
диэл - радиус диэлектрического тела;  - оптимальный радиус, при котором при заданной мощности поля излучателей, расположенных на отражающем экране в точке фокусировки диэлектрического тела, достигается максимальное значение плотности потока мощности поля; радиус a
1 совместно с величиной а
opt определяют возможный интервал выбора радиуса а отражающего экрана; величина а
1 зависит от допустимого уровня pДОП Н плотности потока мощности
- оптимальный радиус, при котором при заданной мощности поля излучателей, расположенных на отражающем экране в точке фокусировки диэлектрического тела, достигается максимальное значение плотности потока мощности поля; радиус a
1 совместно с величиной а
opt определяют возможный интервал выбора радиуса а отражающего экрана; величина а
1 зависит от допустимого уровня pДОП Н плотности потока мощности  на периферии диэлектрического тела, нормированной к аналогичному параметру
на периферии диэлектрического тела, нормированной к аналогичному параметру  в точке фокусировки, и определяется из условий
в точке фокусировки, и определяется из условий

 tgΔ(λС) - угол диэлектрических потерь в среде для используемого типа поля.
tgΔ(λС) - угол диэлектрических потерь в среде для используемого типа поля.
При этом в качестве воздействующего излучения может быть использовано ультразвуковое или электромагнитное поле, выбираемое исходя из минимального значения коэффициента потерь внутри облучаемого объекта.
Поверхность отражающего экрана может иметь цилиндрическую или сферическую форму или форму, совпадающую с поверхностью диэлектрического тела.
Возбуждение излучателей может осуществляться гармоническим или импульсным сигналом.
Кроме того, при определении координат точек фокусировки m=1…М и необходимых комплексных амплитуд возбуждения  учитывают зависимость координат
учитывают зависимость координат  от времени t в случае, если координаты точек фокусировки диэлектрического тела смещаются во времени, например, для различных органов биологических объектов, таких как сердце.
от времени t в случае, если координаты точек фокусировки диэлектрического тела смещаются во времени, например, для различных органов биологических объектов, таких как сердце.
Поставленная задача также достигается тем, что в устройство для неинвазивной абляции и деструкции участков диэлектрического тела с потерями, содержащее генератор, вход управления которого соединен с блоком управления и вычисления, подсоединенным к блоку визуализации, АЦП и излучатели, размещенные на поверхности отражающего экрана, согласно изобретению введены последовательно соединенные n-канальный делитель мощности, n-канальный коммутатор каналов и n-канальный блок управления возбуждением излучателей, выходы которого подключены соответственно к n-излучателям, при этом выход генератора через АЦП подсоединен к входу n-канального делителя мощности, управляющие входы n-канального делителя мощности, n-канального коммутатора каналов и n-канального блока управления возбуждением излучателей соединены соответственно с управляющими выходами блока управления и вычисление, первый и второй информационные входы которого подсоединены соответственно к информационным выходам n-канального блока управления возбуждением излучателей, каждый из каналов n-канального блока управления возбуждением излучателей состоит из последовательно соединенных блока управления амплитудой сигнала, вход которого является входом соответствующего канала n-канального блока управления возбуждением излучателей, блока управления фазой сигнала, блока развязки и коммутатора, блока сравнения падающей и отраженной волн и последовательно соединенных измерителя КБВ и управляемого согласующего блока, выход которого является выходом соответствующего канала n-канального блока управления возбуждением излучателей, первый вход блока сравнения падающей и отраженной волн соединен с выходом блока управления фазой сигнала, а его второй вход соединен с вторым выходом блока развязки, выход коммутатора через нормально замкнутый контакт подключен к выходу соответствующего канала n-канального блока управления возбуждением излучателей, а через нормально разомкнутый контакт - с входом измерителя КБВ, при этом управляющие входы блока управления амплитудой сигнала, блока управления фазой сигнала и управляемого согласующего блока являются управляющими входами соответствующего канала n-канального блока управления возбуждением излучателей, а выходы блока сравнения падающей и отраженной волн и измерителя КБВ являются информационными выходами n-канального блока управления возбуждением излучателей.
Причем генератор может быть выполнен в виде источника электромагнитного излучения или в виде источника ультразвукового излучения.
Поверхность отражающего экрана может иметь цилиндрическую или сферическую форму.
Предложенные способ для неинвазивной абляции и деструкции участков диэлектрического тела с потерями и устройство, его реализующее, обеспечивают оптимальную фокусировку в заданной точке и ее минимальный размер, максимальную концентрацию и точность фокусировки УЗ или ЭМ поля в заданной области диэлектрического объекта с неизвестной или недостаточно известной неоднородной структурой за счет проведения предварительной настройки и последующей фокусировки излучателей с использованием разработанного специального алгоритма yпpaвлeния, оцифровки сигнала от источника излучения, обеспечения минимально допустимой концентрации поля вне точки фокусировки, сохранение высокой концентрации мощности и точности фокусировки при временном перемещении заданной области абляции и деструкции, выбор оптимального частотного диапазона и подаваемой мощности.
Изобретение поясняется чертежами.
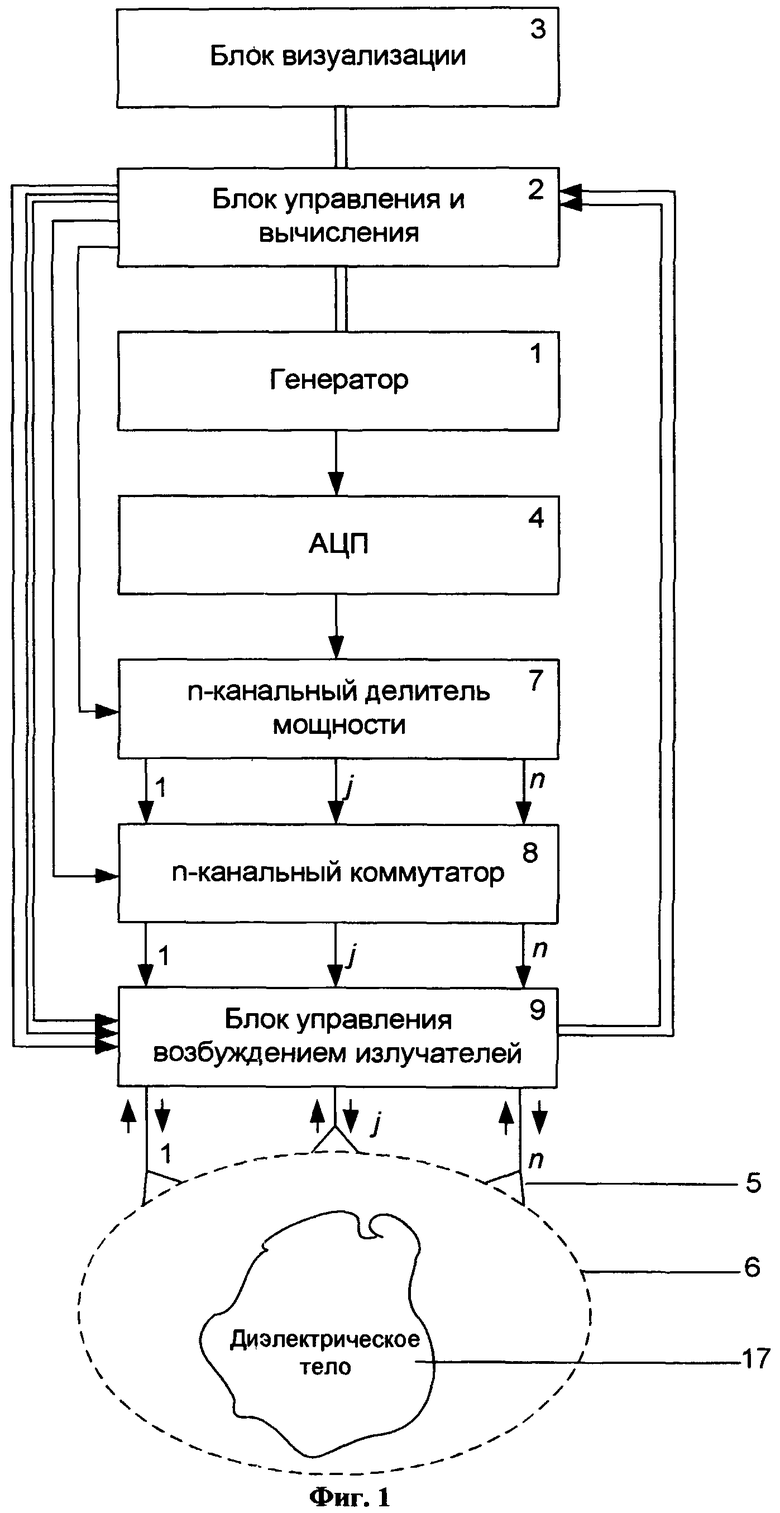
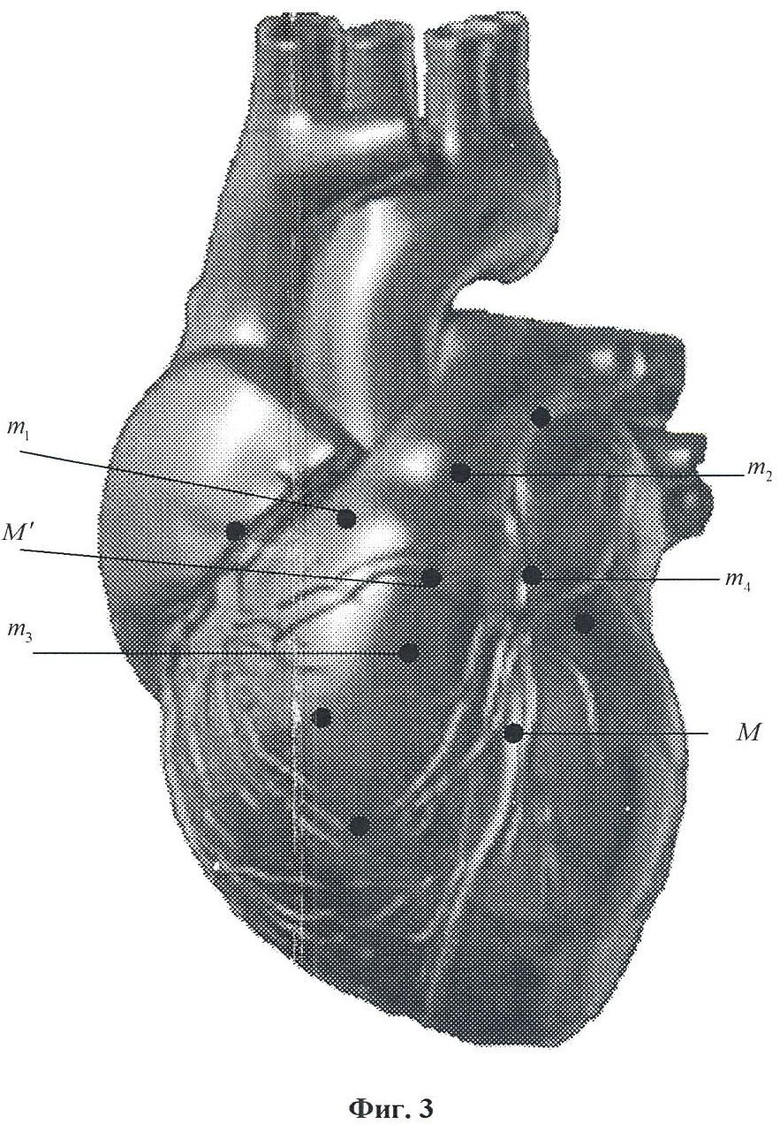
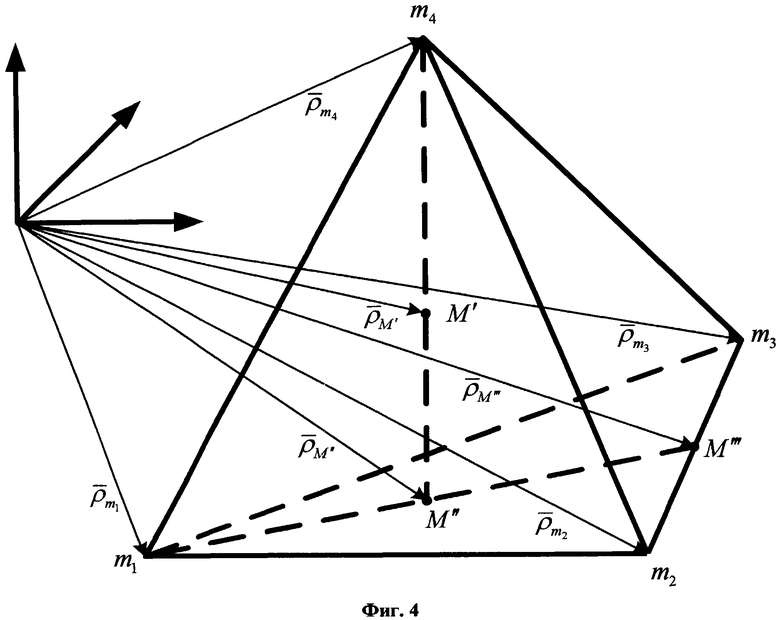
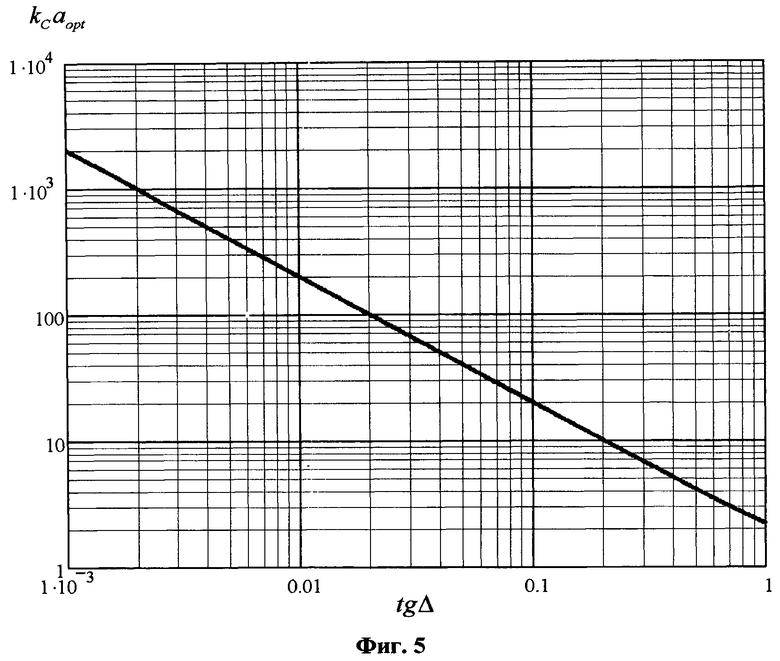
На фиг.1 приведена структурная электрическая схема устройства неинвазивной абляции и деструкции участков диэлектрического тела с потерями; на фиг.2 - структурная электрическая схема одного канала n-канального блока управления возбуждением излучателей; на фиг.3 приведена схема расположения m=1…М точек фокусировки в требуемом объеме участка диэлектрического тела - сердечной мышцы, определенных в процессе предварительной настройки; на фиг.4 приведена схема, поясняющая процесс определения параметров фокусировки поля в произвольной точке М', на фиг.5 представлена расчетная зависимость электрического радиуса kС
a
1 при pДОП Н=0.01 для случаев в диэлектрике (трех значений tgΔ=0.1; 0.05 и 0.01). Задавая значения kС, нетрудно определить величины радиуса a
1. Рассчитанные зависимости kС
a
1 от tgΔ для pДОП Н=0.01 и pДОП Н=0.05 приведены в таблице. Оптимальный электрический и радиус kС
a
opt сферической поверхности, по которой размещаются излучатели, определяется из выражения  .
.
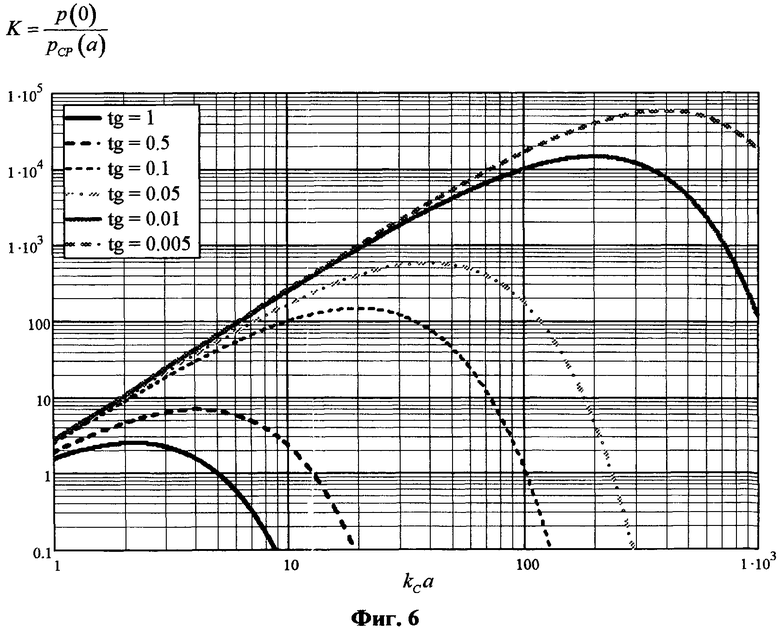
На фиг.6 представлены рассчитанные зависимости коэффициента концентрации К плотности потока мощности  в фокусе по отношению к средней плотности потока мощности источников
в фокусе по отношению к средней плотности потока мощности источников 
 от электрического радиуса сферы kС
a, на поверхности которой располагаются излучатели, при различных значениях потерь tgΔ в диэлектрике. По графику на фиг.6 для выбранного размера kС
a=kСaopt определяется необходимая мощность генератора
от электрического радиуса сферы kС
a, на поверхности которой располагаются излучатели, при различных значениях потерь tgΔ в диэлектрике. По графику на фиг.6 для выбранного размера kС
a=kСaopt определяется необходимая мощность генератора  .
.
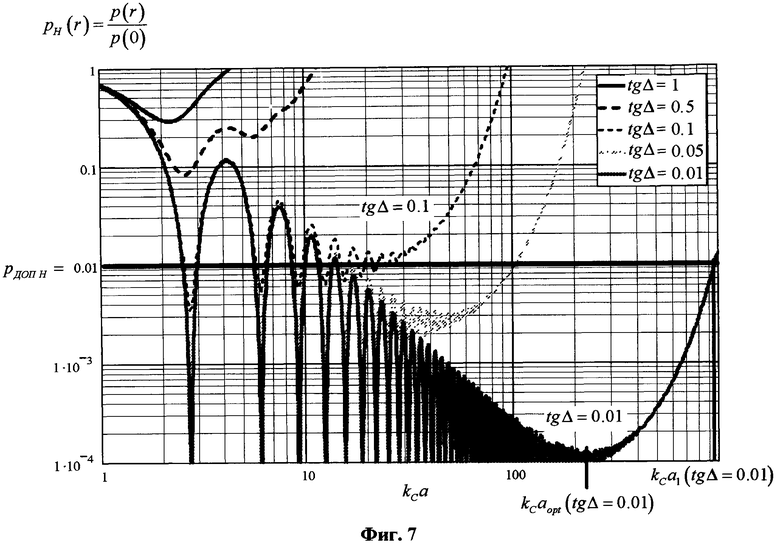
На фиг.7 представлены рассчитанные зависимости плотности потока мощности  , нормированной к плотности потока мощности в фокусе
, нормированной к плотности потока мощности в фокусе  , от электрического расстояния kС
a до фокуса диэлектрической сферы для различных tgΔ, в качестве примера показаны границы a
1 при рДОП Н=10-2, которые показывают, что величина РДОП Н не может быть меньше некоторой минимальной для данного tgΔ величины РДОП Н min.
, от электрического расстояния kС
a до фокуса диэлектрической сферы для различных tgΔ, в качестве примера показаны границы a
1 при рДОП Н=10-2, которые показывают, что величина РДОП Н не может быть меньше некоторой минимальной для данного tgΔ величины РДОП Н min.
По графику на фиг.7 определяются допустимые значения a 1 из условия
 ,
,
где рДОП Н - допустимая, нормированная к  , плотность потока мощности источников на расстояниях a
1 от фокальной точки. Радиус а сферической поверхности выбирается из условий
, плотность потока мощности источников на расстояниях a
1 от фокальной точки. Радиус а сферической поверхности выбирается из условий
 .
.
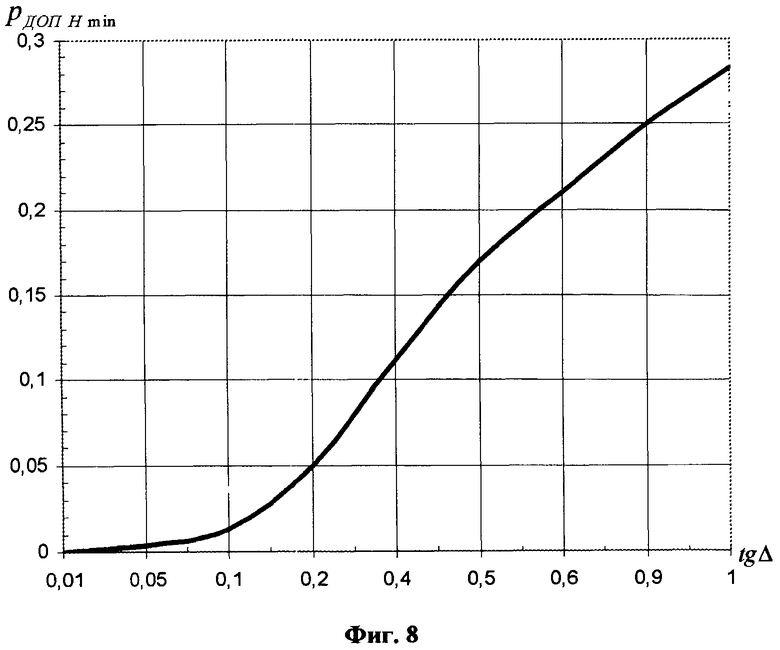
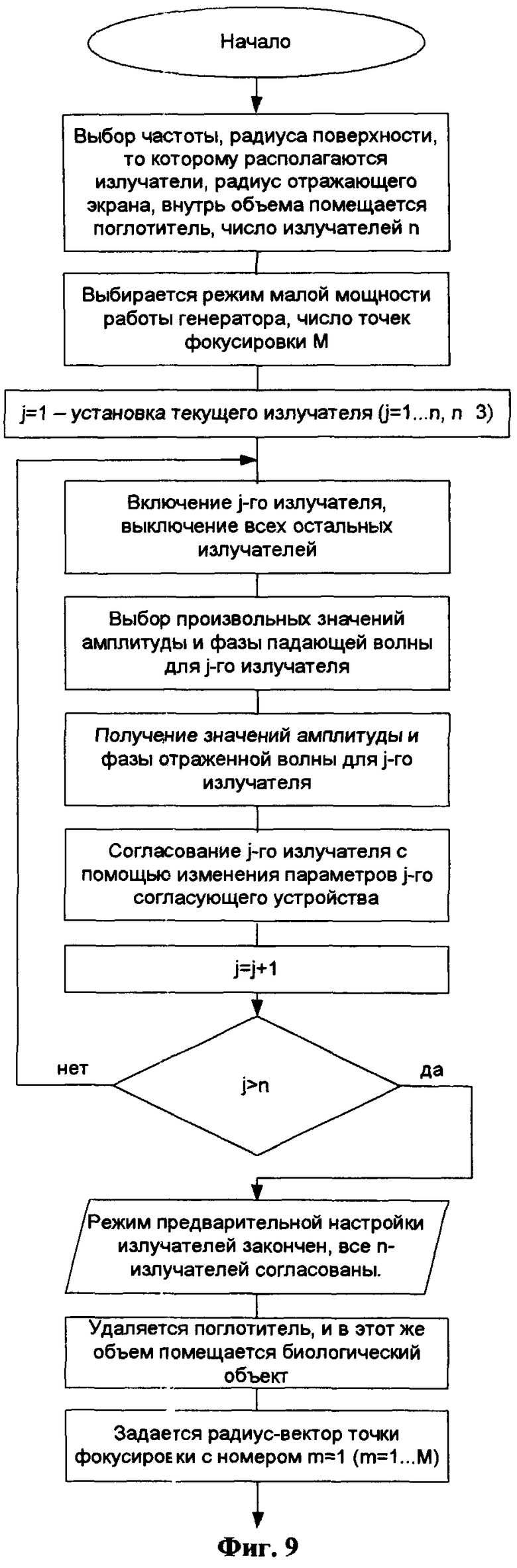
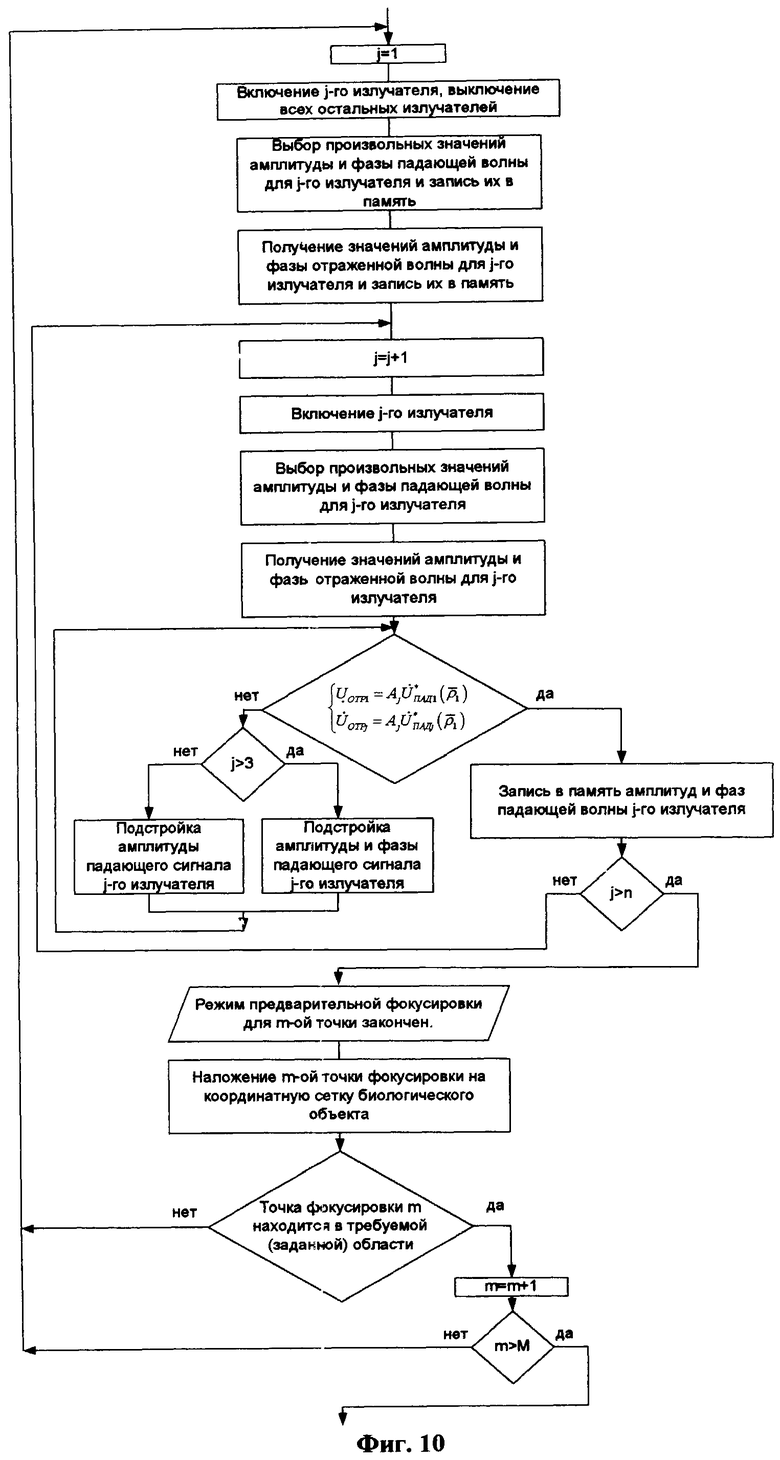
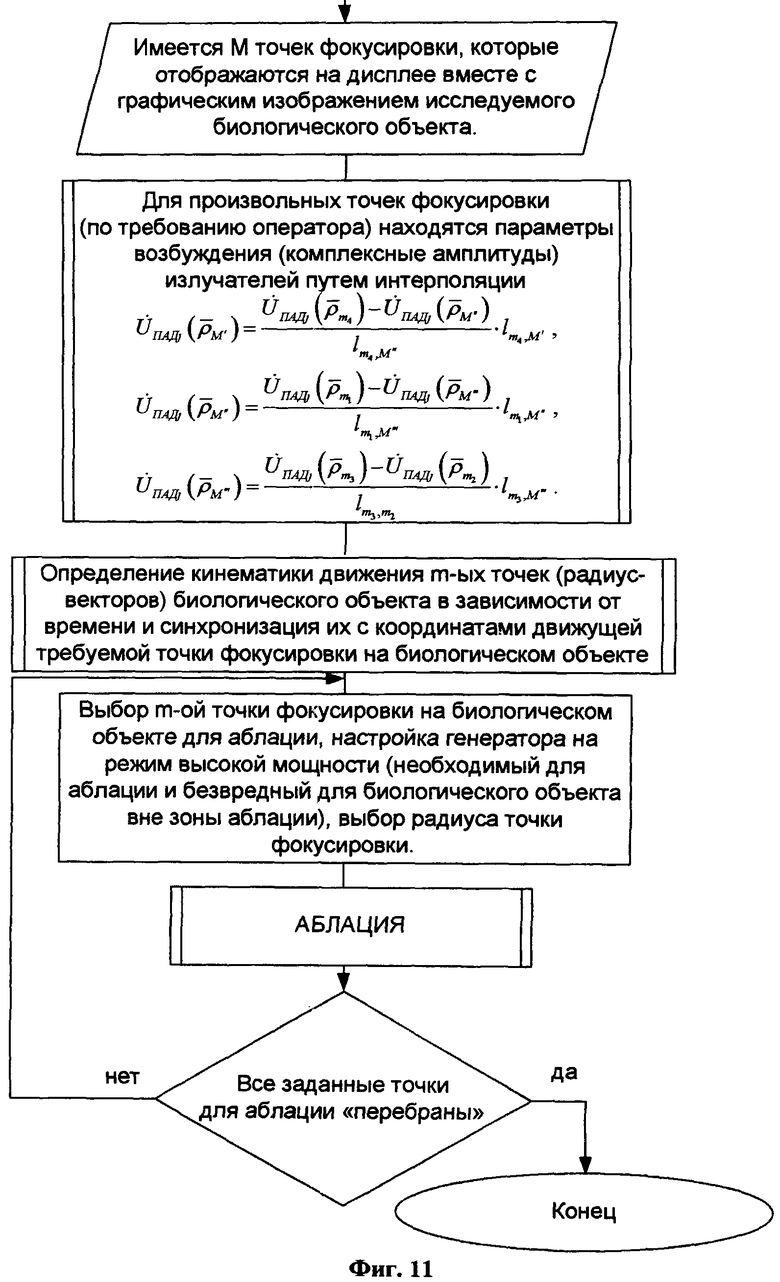
На фиг.8 показана расчетная зависимость РДОП Н min (tgΔ) для сферического диэлектрического объема с потерями; на фиг.9, 10, 11 приведен алгоритм, реализующий предлагаемый способ фокусировки излучателей и последующей термической деструкции.
Реализация изложенного способа абляции и деструкции, представленная в виде алгоритма (фиг.9, 10, 11), заключается в следующем.
На первом этапе выбирается оптимальная частота облучения абляции из условия:
λС=2rФ,
где rФ - радиус фокального пятна, λС - длина волны падающего поля в диэлектрике без потерь, а целесообразный тип поля (УЗ или ЭМ) зависит от уровня потерь на этой частоте и определяется из сравнения для обоих полей УЗ или ЭМ величины 
 tgΔ(λС) - угол диэлектрических потерь в среде для обоих полей, и выбором того поля, потери в котором минимальны.
tgΔ(λС) - угол диэлектрических потерь в среде для обоих полей, и выбором того поля, потери в котором минимальны.
Расчеты показывают, что, в частности, целесообразный поддиапазон частот для УЗ абляции в кардиологии лежит в интервале 0.5…2 МГц.
Радиус а сферической (цилиндрической) поверхности, по которой располагаются излучатели, выбирают из условий
 ,
,
где а
диэл - радиус диэлектрического тела;  - оптимальный радиус сферической (цилиндрической) поверхности, при котором при заданной полной мощности поля излучателей, расположенных на сферической (цилиндрической) поверхности в точке фокусировки диэлектрического тела, достигается максимальное значение плотности потока мощности поля; радиус а
1 совместно с величиной а
opt определяют возможный интервал выбора радиуса а сферической или цилиндрической поверхности, на которой располагаются излучатели; величина а
1 зависит от допустимого уровня рДОП Н плотности потока мощности
- оптимальный радиус сферической (цилиндрической) поверхности, при котором при заданной полной мощности поля излучателей, расположенных на сферической (цилиндрической) поверхности в точке фокусировки диэлектрического тела, достигается максимальное значение плотности потока мощности поля; радиус а
1 совместно с величиной а
opt определяют возможный интервал выбора радиуса а сферической или цилиндрической поверхности, на которой располагаются излучатели; величина а
1 зависит от допустимого уровня рДОП Н плотности потока мощности  на периферии диэлектрического тела, нормированной к аналогичному параметру
на периферии диэлектрического тела, нормированной к аналогичному параметру  в фокусе, и определяется из условий
в фокусе, и определяется из условий
 .
.
Радиус произвольной замкнутой поверхности, совпадающей с поверхностью диэлектрического тела, в котором проводят абляцию или деструкцию, - это половинная длина максимального расстояния между точками данного диэлектрического тела.
Затем осуществляется настройка каждого из излучателей на режим бегущей волны путем согласования каждого из n-излучателей в присутствии внутри отражающего экрана объемного поглотителя, в качестве которого может быть использован графит для электромагнитного поля или резина для УЗ поля, с помощью изменения параметров согласующего блока в каждом из излучателей.
Для улучшения контакта излучателей с диэлектрическим (биологическим) объектом может быть использована вода или жидкость с малыми диэлектрическими потерями.
На втором этапе вместо объемного поглотителя внутрь объема, ограниченного отражающим экраном, помещается диэлектрическое тело и производится настройка излучателей на точки, расположенные в выбранной области. Режим настройки выполняется в статическом режиме на неподвижном диэлектрическом объекте на малой мощности генератора. В частности, для биологического объекта, например, сердца, данное действие может выполняться при его кратковременной остановке при мощности до 1 Вт, безвредной для организма.
Система излучателей настраивается на первую точку фокусировки. С этой целью включается первый излучатель, при этом все остальные излучатели находятся в выключенном состоянии, производится выбор произвольной амплитуды  и фазы
и фазы  и запись амплитуды
и запись амплитуды  и фазы
и фазы  первого излучателя. Далее получают отраженную от диэлектрического тела волну в первом излучателе и записывают ее амплитуду
первого излучателя. Далее получают отраженную от диэлектрического тела волну в первом излучателе и записывают ее амплитуду  и фазу
и фазу  Оставляя условия возбуждения первого излучателя неизменными, включают следующий, второй излучатель, выбирают произвольную амплитуду
Оставляя условия возбуждения первого излучателя неизменными, включают следующий, второй излучатель, выбирают произвольную амплитуду  и фазу
и фазу  проверяют условие фокусировки
проверяют условие фокусировки  . Если оно не выполняется, происходит подстройка амплитуды падающего сигнала во втором излучателе и условие фокусировки проверяется снова. При выполнении указанного выше условия фокусировки - значения амплитуды
. Если оно не выполняется, происходит подстройка амплитуды падающего сигнала во втором излучателе и условие фокусировки проверяется снова. При выполнении указанного выше условия фокусировки - значения амплитуды  и фазы
и фазы  второго излучателя записываются.
второго излучателя записываются.
Оставляя условия возбуждения первого и второго излучателей неизменными, включают следующий, третий излучатель, выбирают произвольную амплитуду  и фазу
и фазу  проверяют условие фокусировки
проверяют условие фокусировки  Если оно не выполняется, происходит подстройка амплитуды падающего сигнала в третьем излучателе и условие фокусировки проверяется снова. При выполнения указанного выше условия фокусировки значения амплитуды
Если оно не выполняется, происходит подстройка амплитуды падающего сигнала в третьем излучателе и условие фокусировки проверяется снова. При выполнения указанного выше условия фокусировки значения амплитуды  и
и  третьего излучателя записываются.
третьего излучателя записываются.
Оставляя условия возбуждения первого, второго и третьего излучателей неизменными, включают следующий, j-й (j=1…n) излучатель, выбирают произвольную амплитуду  и фазу
и фазу  и проверяют условие фокусировки
и проверяют условие фокусировки  . Если оно не выполняется, происходит подстройка амплитуды и фазы падающего сигнала в j-м излучателе и условие фокусировки проверяется снова. При выполнении указанного выше условия фокусировки значения амплитуды
. Если оно не выполняется, происходит подстройка амплитуды и фазы падающего сигнала в j-м излучателе и условие фокусировки проверяется снова. При выполнении указанного выше условия фокусировки значения амплитуды  и фазы
и фазы  j-го излучателя записываются.
j-го излучателя записываются.
После перебора всех излучателей или в случае досрочного окончания процедуры настройки имеются все данные для настройки всех излучателей на первую точку фокусировки. Проводится наложение первой точки фокусировки на координатную сетку диэлектрического (биологического) объекта (фиг.3), и проводится проверка, находится ли данная точка фокусировки в требуемой (заданной) области. В случае положительного результата повторяют процедуру фокусировки всех излучателей на вторую точку фокусировки, в противном случае - фокусировка первой точки производится заново.
Этот цикл повторяется до тех пор, пока не просчитается необходимое количество точек фокусировки М, заданное оператором, или не просканируется заданная область диэлектрического (биологического) объекта с требуемым шагом. При этом для произвольной точки М' вне найденных М точек фокусировки, но расположенной в области тетраэдра (фиг.4) можно найти параметры возбуждения, т.е. комплексные амплитуды излучателей, путем интерполяции по следующему алгоритму (фиг.4):
 ,
,
 ,
,
 .
.
Для ускорения процедуры предварительной настройки падающее поле в каждом j-м излучателе  задают в виде дискретного набора Qa уровней
задают в виде дискретного набора Qa уровней  и Qφ уровней
и Qφ уровней  , qa=1…Qa, qφ=1…Qφ. При этом перебор уровней амплитуд и фаз j-го излучателя проводится до выполнения условий минимизации разности
, qa=1…Qa, qφ=1…Qφ. При этом перебор уровней амплитуд и фаз j-го излучателя проводится до выполнения условий минимизации разности
 .
.
Максимальное количество сфокусированных точек Мmax при выборе дискретного набора  равно
равно  Так уже при Qφ=2 Мmax=8, при Qφ=4 Мmax=64, при Qφ=8 Мmax=512. Максимальное количество различных дискретных значений амплитуды Qa, фазы Qφ и коэффициентов
Так уже при Qφ=2 Мmax=8, при Qφ=4 Мmax=64, при Qφ=8 Мmax=512. Максимальное количество различных дискретных значений амплитуды Qa, фазы Qφ и коэффициентов  в каждом j-ом излучателе зависит от требуемой точности фокусировки. Для ускорения процесса предварительной настройки в качестве начального приближения для
в каждом j-ом излучателе зависит от требуемой точности фокусировки. Для ускорения процесса предварительной настройки в качестве начального приближения для  можно выбрать величину, комплексно сопряженную коэффициенту передачи
можно выбрать величину, комплексно сопряженную коэффициенту передачи  от j-го излучателя до m-го фокуса. Коэффициент передачи
от j-го излучателя до m-го фокуса. Коэффициент передачи  может быть рассчитан приближенно в предположении приблизительно известных параметров среды (в частности, для биологической ткани - скорости УЗ волны). Коэффициенты A1, А2, А3, Aj определяются в процессе настройки излучателей и определяют, соответственно, величины изменения амплитуд падающего излучения до выполнения условий фокусировки.
может быть рассчитан приближенно в предположении приблизительно известных параметров среды (в частности, для биологической ткани - скорости УЗ волны). Коэффициенты A1, А2, А3, Aj определяются в процессе настройки излучателей и определяют, соответственно, величины изменения амплитуд падающего излучения до выполнения условий фокусировки.
Таким образом, получают данные обо всех точках фокусировки на диэлектрическом (биологическом) объекте, где необходимо провести процедуру абляции и деструкции. Затем определяется кинематика движения этих точек на диэлектрическом (биологическом) теле в зависимости от времени и их синхронизация с координатами движущегося диэлектрического (биологического) объекта, например, с биением сердца.
Выбирают первую точку фокусировки на диэлектрическом теле, необходимую для деструкции, устанавливают мощность, необходимую для деструкции и безвредную для диэлектрического тела вне зоны фокусировки, и начинают саму процедуру деструкции, контролируя ее визуально. Время деструкции зависит от параметров диэлектрического тела и может контролироваться, например, с помощью датчика температуры.
При необходимости выбирают вторую точку фокусировки и продолжают деструкцию, например, до тех пор, пока требуемая (заданная) область биологического объекта не будет очищена от всех вредных эктопических центров и дополнительных путей проведения, вызывающих эффект повторного входа.
При необходимости увеличения радиуса деструкции вводятся дополнительные фазовые ошибки в возбуждение излучателей.
Для усиления концентрации поля в точке аблации или деструкции в качестве отдельного излучателя может быть использована предварительно сфокусированная система излучателей с управляемым положением фокуса.
Устройство для неинвазивной абляции и деструкции участков диэлектрического тела с потерями, представленное на фиг.1, содержит генератор 1, вход управления которого соединен с блоком управления и вычисления 2, соединенным с блоком визуализации 3, аналого-цифровой преобразователь (АЦП) 4 и излучатели 5, размещенные на поверхности отражающего экрана 6, последовательно соединенный n-канальный делитель 7, n-канальный коммутатор каналов 8 и n-канальный блок управления возбуждением излучателей 9, выходы которого подключены соответственно к n-излучателям 5, при этом выход генератора 1 через АЦП 4 подсоединен к входу n-канального делителя мощности 7, управляющие входы n-канального делителя мощности 7, n-канального коммутатора каналов 8 и n-канального блока управления возбуждением излучателей 9 соединены соответственно с управляющими выходами блока управления и вычисления 2, информационные входы которого подсоединены к информационным выходам n-канального блока управления возбуждением излучателей 9.
Каждый из каналов n-канального блока управления возбуждением излучателей 9 (фиг.2) состоит из последовательно соединенных блока управления амплитудой сигнала 10, вход которого является входом соответствующего j-го канала n-канального блока управления возбуждением излучателей 9, блока управления фазой сигнала 11, блока развязки 12 и коммутатора 13, блока сравнения падающей и отраженной волн 14 и последовательно соединенных измерителя коэффициента бегущей волны (КБВ) 15 и управляемого согласующего блока 16, выход которого является выходом соответствующего j-го канала n-канального блока управления возбуждением излучателей 9, первый вход блока сравнения падающей и отраженной волн 14 соединен с выходом блока управления фазой сигнала 11, а его второй вход соединен с вторым выходом блока развязки 12, выход коммутатора 13 через нормально замкнутый контакт подключен к выходу соответствующего j-го канала n-канального блока управления возбуждением излучателей 9, а через нормально разомкнутый контакт коммутатора 13 - с входом измерителя КБВ 15, при этом управляющие входы блока управления амплитудой сигнала 10, блока управления фазой сигнала 11 и управляемого согласующего блока 16 являются управляющими входами соответствующего j-го канала n-канального блока управления возбуждением излучателей 9, а выходы блока сравнения падающей и отраженной волн 14 и измерителя КБВ 15 являются информационными выходами n-канального блока управления возбуждением излучателей 9.
Причем генератор 1 может быть выполнен в виде источника электромагнитного излучения или в виде источника ультразвукового излучения.
Поверхность отражающего экрана 6 может иметь цилиндрическую или сферическую форму и полностью охватывать диэлектрическое (биологическое) тело 17.
Устройство, реализующее способ деструкции по изложенному выше алгоритму (фиг.9, 10, 11), работает следующим образом. Сигналы от генератора 1 через АЦП 4 поступают на n-канальный делитель мощности 7 с их последующей коммутацией через n-канальный коммутатор 8. Коммутатор 8 работает в двух режимах. В режиме согласования он поочередно включает только каждый j-й канал (j=1…n). В режиме настройки коммутатор 8 одновременно включает все каналы с номерами от единицы до j (j=1…n). Делитель мощности 7 имеет n выходных каналов, которые через n-канальный коммутатор 8 связаны с n излучателями 5 через блок 9. В блоке 9 производится управление амплитудой и фазой падающей волны путем подачи сигнала ошибки с блока 14 до момента выполнения условий сопряжения отраженной и падающей волны в каждом из каналов. Процедура управления излучателями 5 и коммутаторами блока 8 производится с помощью соответствующих программ, заложенных в блоке 2, который может быть реализован на базе компьютера. Для визуализации настройки системы и процедуры абляции используется блок визуализации 3, например, например, эхо-УЗИ или аппарат МРТ (магнитно-резистивной терапии). В качестве блока развязки 12 в диапазоне электромагнитных волн может использоваться циркулятор, для УЗ поля - направленный ответвитель с согласующей нагрузкой.
Авторами установлено, что выполнение в отраженном поле условия комплексного сопряжения обеспечивает наилучшую фокусировку поля в m-й точке, положение которой определяется радиусом-вектором  (фиг.4) при произвольной, в т.ч. и неоднородной, структуре биологической ткани или иной диэлектрической структуры. При этом местоположение этой точки определяется в результате цифровой или аналоговой обработки отраженного поля в блоке визуализации 3. Блок визуализации 3 выводит изображение облучаемого объекта, на которое яркой точкой накладывается m-я точка фокусировки поля в этом органе.
(фиг.4) при произвольной, в т.ч. и неоднородной, структуре биологической ткани или иной диэлектрической структуры. При этом местоположение этой точки определяется в результате цифровой или аналоговой обработки отраженного поля в блоке визуализации 3. Блок визуализации 3 выводит изображение облучаемого объекта, на которое яркой точкой накладывается m-я точка фокусировки поля в этом органе.
В режиме согласования излучателей 5 сигнал с j-го выхода коммутатора 8, управляемого блоком 2, поступает на блоки управления амплитудой 10 и фазой 11 сигнала, также управляемые блоком 2. Далее сигнал поступает на блок развязки 12, выход которого соединен с коммутатором 13. Для данного режима сигнал с коммутатора 13 поступает на блок измерения КБВ 15 и затем - на управляемый от блока 2 согласующий блок 16, с выхода которого сигнал подается на вход j-го излучателя. Параметры согласующего блока 16, например, длина согласующего шлейфа, выбираются из условия обеспечения КБВ, близкого к единице. Эта операция проводится для каждого из j (j=1…n) излучателей.
В режиме фокусировки сигнал с первого выхода коммутатора 8 поступает на блок управления амплитудой 10 и блок управления фазой 11 сигнала, а затем передается в блок сравнения 14. Одновременно сигнал поступает через блок развязки 12 и коммутатор 13 непосредственно на вход первого излучателя. С выхода первого излучателя отраженный сигнал через коммутатор 13 и блок развязки 12 поступает на блок сравнения 14. В дальнейшем происходит управление от блока 2 амплитудой и фазой сигнала (блоки 10, 11) до выполнения условия  . Полученные в результате выполнения данного условия параметры фокусировки записываются в блок 2, и устройство переходит к настройке следующего излучателя, при этом параметры возбуждения предыдущего излучателя остаются неизменными. После настройки всех n-излучателей или в случае досрочного окончания процедуры настройки имеются все данные для настройки всех n-излучателей 1 на первую точку фокусировки. Проводится наложение первой точки фокусировки на координатную сетку диэлектрического (биологического) тела 17 (фиг.3), отображаемое на блоке визуализации 3, и проводится проверка, находится ли данная точка фокусировки в требуемой (заданной) области. В случае положительного результата повторяют процедуру фокусировки всех излучателей на вторую точку фокусировки, в противном случае - фокусировка первой точки повторяется заново. Данный цикл повторяется до тех пор, пока не произойдет фокусировка М точек, заданных оператором, или не просканируется заданная область диэлектрического (биологического) объекта с требуемым шагом. В итоге точки фокусировки отображаются на блоке визуализации 3.
. Полученные в результате выполнения данного условия параметры фокусировки записываются в блок 2, и устройство переходит к настройке следующего излучателя, при этом параметры возбуждения предыдущего излучателя остаются неизменными. После настройки всех n-излучателей или в случае досрочного окончания процедуры настройки имеются все данные для настройки всех n-излучателей 1 на первую точку фокусировки. Проводится наложение первой точки фокусировки на координатную сетку диэлектрического (биологического) тела 17 (фиг.3), отображаемое на блоке визуализации 3, и проводится проверка, находится ли данная точка фокусировки в требуемой (заданной) области. В случае положительного результата повторяют процедуру фокусировки всех излучателей на вторую точку фокусировки, в противном случае - фокусировка первой точки повторяется заново. Данный цикл повторяется до тех пор, пока не произойдет фокусировка М точек, заданных оператором, или не просканируется заданная область диэлектрического (биологического) объекта с требуемым шагом. В итоге точки фокусировки отображаются на блоке визуализации 3.
Определенные таким образом в заданной области биологической ткани или иной диэлектрической среды m=1…М точек фокусировки и требуемый для фокусировки вектор комплексных амплитуд напряжений падающей волны  образуют своеобразный базис, позволяющий при необходимости с помощью интерполяции по соседним точкам, ближайшим четырем точкам с номерами m1, m2, m3, m4, определить параметры возбуждения излучателей для произвольной точки фокусировки М' (фиг.3, 4) по следующему алгоритму:
образуют своеобразный базис, позволяющий при необходимости с помощью интерполяции по соседним точкам, ближайшим четырем точкам с номерами m1, m2, m3, m4, определить параметры возбуждения излучателей для произвольной точки фокусировки М' (фиг.3, 4) по следующему алгоритму:
 ,
,
 ,
,
 .
.
Для ускорения процедуры предварительной настройки падающее поле в каждом j-м излучателе  задают в виде дискретного набора Qa уровней
задают в виде дискретного набора Qa уровней  и Qφ уровней
и Qφ уровней  qa=1…Qa, qφ=1…Qφ. При этом перебор уровней амплитуд и фаз j-го излучателя проводится до выполнения условий минимизации разности
qa=1…Qa, qφ=1…Qφ. При этом перебор уровней амплитуд и фаз j-го излучателя проводится до выполнения условий минимизации разности
 .
.
Максимальное количество сфокусированных точек Мmax при выборе дискретного набора  равно
равно  Так уже при Qφ=2 Мmax=8, при Qφ=4 Mmax=64, при Qφ=8 Мmax=512. Максимальное количество различных дискретных значений амплитуды Qa, фазы Qφ и коэффициентов
Так уже при Qφ=2 Мmax=8, при Qφ=4 Mmax=64, при Qφ=8 Мmax=512. Максимальное количество различных дискретных значений амплитуды Qa, фазы Qφ и коэффициентов  в каждом j-м излучателе зависит от требуемой точности фокусировки. Для ускорения процесса предварительной настройки в качестве начального приближения для
в каждом j-м излучателе зависит от требуемой точности фокусировки. Для ускорения процесса предварительной настройки в качестве начального приближения для  можно выбрать величину, комплексно сопряженную коэффициенту передачи
можно выбрать величину, комплексно сопряженную коэффициенту передачи  от j-го излучателя до m-го фокуса. Коэффициент передачи
от j-го излучателя до m-го фокуса. Коэффициент передачи  может быть рассчитан приближенно в предположении приблизительно известных параметров среды, в частности, для биологической ткани - скорости УЗ волны.
может быть рассчитан приближенно в предположении приблизительно известных параметров среды, в частности, для биологической ткани - скорости УЗ волны.
В вышеприведенных соотношениях учитывают, что координаты фокальной точки  зависят от времени t по известному закону.
зависят от времени t по известному закону.
Одним из вариантов определения координат фокальной точки при биении сердца является процедура нахождения этих координат при одном и том же положении сердца, например, при кратковременной остановке сердца, и последующее определение динамики изменения этих координат при биении сердца с помощью специального устройства, например, аппарата эхо-УЗИ диагностики.
Этап предварительной настройки системы, включая последовательности выполнения задач, осуществляется с использованием алгоритма управления, заложенного в блок 2, который может быть реализован в виде быстродействующего компьютера, а сигнал генератора 1 оцифровывается с помощью АЦП 4, установленного на выходе генератора. Для упрощения процедуры настройки комплексная амплитуда падающего поля в каждом излучателе представляется в цифровом виде и меняется по дискретному закону как по амплитуде, так и по фазе. Сигнал с генератора 1 может быть как гармонический, так и импульсный.
Все расчетные зависимости получены в результате моделирования УЗ и ЭМ полей диэлектрике с потерями (биологической ткани) в виде сферического объема, по поверхности которого располагаются источники УЗ или ЭМ поля. Для диэлектрического объема в виде конечного цилиндра и объема, ограниченного произвольной замкнутой поверхностью, основные результаты моделирования качественно остаются такими же.
Таким образом, имеются данные обо всех точках фокусировки на исследуемом биологическом объекте, где необходимо провести процедуру абляции. Определяем кинематику движения этих точек биологического тела в зависимости от времени и синхронизируем их с координатами движущегося биологического объекта, например, биением сердца.
После предварительной настройки системы, когда все излучатели настроены на все необходимые для деструкции точки на диэлектрическом объекте, блок 2 включает режим повышенной мощности, необходимой для осуществления деструкции и безвредной для диэлектрического объекта вне зоны деструкции. Выбирают первую точку для деструкции и начинают саму процедуру деструкции, контролируя ее визуально с помощь блока визуализации 3. Время деструкции зависит от параметров диэлектрического объекта, определяемых заранее, и может контролироваться, например, с помощью датчика температуры. После завершения деструкции в первой точке при необходимости выбирают вторую точку фокусировки и продолжают процесс деструкции.
При необходимости увеличения радиуса деструкции вводятся дополнительные фазовые ошибки в возбуждение излучателей 5.
Изложенный способ абляции и деструкции и функционирование устройства представлены в виде алгоритма (фиг.9, 10, 11), реализованного в виде программы, записанной в блок 2.
Источники информации
1. Аразанов В.Н., Арданов А.В., Стеклов В.И. Лечение нарушений сердечного ритма. - М.: Москва, 2005. - 228 с.
2. Домаркас В.Й., Пилецкая Э.Л. Ультразвуковая эхоскопия. - Л.: Машиностроение, Ленингр. отд., 1988, стр.139.
3. Патент US 4696299, Non-invasive destruction of kidney stones, William R.Shene, Christopher Nowacki, Alfred G.Brisson, приоритет от 29.09.1987.
4. Аппарат «Аблятерм» фирмы EDAP для высокоинтенсивной сфокусированной ультразвуковой аблации, http://www.medlinks.ru/topics.php?op=cat&category=3 (проверено 13.04.2011).
5. Система «ExAblate» для неинвазивной абляции опухолей и специфических тканей фокусированным ультразвуком под контролем магнитно-резонансной томографии, производитель Insightec, http://rosslynmedical.ru/ru/manufacturers/insightec/ (проверено 13.04.2011).
6. Focused ultrasound therapeutic “JC” system - аппарат для лечения твердых опухолей с использованием сфокусированного ультразвука, http://hifu.su/en/equipment/jc/ (проверено 13.04.2011).
7. Воскресенский Д.И., Гостюхин В.Л., Максимов В.М., Пономарев Л.И. Учебник «Устройства СВЧ и антенны» / под ред. Д.И.Воскресенского, изд. 3-е, испр. и доп. - М.: Радиотехника, 2008, стр.295.
8. Кроцдорф А.Э. Ультразвуковая техника. М.: Изд-во "Иностранная техника", 1958.
9. Heart Rhythm «Noninvasive stereotactic radiosurgery (CyberHeart) for creation of ablation lesions in the atrium», Arjun Sharma, Douglas Wong, Georg Weidlich, Thomas Fogarty, Alice Jack, Thilaka Sumanaweera, Patrick Maguire, vol.7, №6, June 2010.
10. Аппарат для ультразвуковой диагностики «Краниоскоп-3М», http://www.8a.ru/print/23396.php (проверено 13.04.2011).
11. Патент US 2010/0268088 A1, Multimode ultrasound focusing for medical applications, Oleg Prus, Shuki Vitek, приоритет от 21.10.2010.
12. Патент US 2010/0125225 A1, System for selective ultrasonic ablation, Daniel Gelbart, Samuel Victor Lichtenstein, приоритет от 20.05.2010.
13. Патент US 2008/0051656 A1, Method for using high intensity focused ultrasound, Shahram Vaezy, Arthur H.Chan, Victor Y.Fujimoto, Donald E.Moore, Roy W.Martin, приоритет от 28.02.2008.
14. Патент по заявке РСТ: CN 2006/001715 20060717, Ультразвуковая терапевтическая система, приоритет от 17.07.2006.
15. Патент Японии JP 322649 (терапевтическая система, в которой используется аппарат магнитно-резонансной томографии).
16. Патент RU №2147848 (прототип). Способ селективной деструкции раковых клеток, Загускин С.Л., Ораевский В.Н., Рапопорт С.И., приоритет от 21.05.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕИНВАЗИВНОГО ЭЛЕКТРОФИЗИОЛОГИЧЕСКОГО ИССЛЕДОВАНИЯ СЕРДЦА | 2008 |
|
RU2435518C2 |
| СПОСОБ НЕИНВАЗИВНОГО ЭЛЕКТРОФИЗИОЛОГИЧЕСКОГО ИССЛЕДОВАНИЯ СЕРДЦА | 2008 |
|
RU2409313C2 |
| СПОСОБ ПЕЛЕНГАЦИИ УЗКОПОЛОСНЫХ РАДИОСИГНАЛОВ КВ ДИАПАЗОНА | 2009 |
|
RU2407026C1 |
| СПОСОБ ПОСТРОЕНИЯ БОРТОВЫХ КОНИЧЕСКИХ АНТЕННЫХ РЕШЕТОК | 2019 |
|
RU2723909C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИСТЕМЫ СОТОВОЙ СВЯЗИ | 2008 |
|
RU2356142C1 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ АБЛЯЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ (2 ВАРИАНТА) | 2021 |
|
RU2780122C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ИНТРОСКОПИИ | 2008 |
|
RU2359265C1 |
| Способ абляции миокарда и устройство для его осуществления | 2021 |
|
RU2788005C1 |
| МНОГОЛУЧЕВАЯ АНТЕННАЯ РЕШЕТКА СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ | 2012 |
|
RU2509399C1 |
| СТИМУЛЯЦИЯ БИОЛОГИЧЕСКИХ ТКАНЕЙ С ПОМОЩЬЮ МАГНИТОАКУСТИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2005 |
|
RU2316368C2 |

Группа изобретений относится к медицинской технике и может быть использована для осуществления неинвазивной абляции и термической и термомеханической деструкции ограниченных областей внутри биологических тел с неоднородной структурой и других диэлектрических тел с потерями путем воздействия на него электромагнитным полем или ультразвуком. Группа изобретений обеспечивает оптимальную фокусировку в заданной точке, минимальный размер фокального пятна и максимальную концентрацию и точность фокусировки воздействующего поля. Устройство содержит генератор, излучатели на поверхности отражающего экрана, АЦП делитель мощности, коммутатор каналов и блок управления излучателями. Предварительно осуществляют настройку излучателей в режиме бегущей волны, затем производят настройку каждого излучателя на выбранные точки фокусировки по специальному алгоритму путем изменения комплексных амплитуд и фаз падающих волн, после настройки излучателей увеличивают мощность излучения до величины, необходимой для осуществления абляции и деструкции заданного участка диэлектрического тела. 2 н. и 7 з.п. ф-лы, 11 ил.
1. Способ неинвазивной абляции и деструкции участков диэлектрического тела с потерями, заключающийся в том, что диэлектрическое тело размещают внутри отражающего экрана, воздействуют на выбранный участок диэлектрического тела излучением соответствующей интенсивности и частоты с помощью излучателей, размещенных на отражающем экране таким образом, что максимумы их диаграмм излучения направлены внутрь объема, ограниченного указанным отражающим экраном, фокусируют излучения от излучателей последовательно на соответствующих точках выбранного участка диэлектрического тела, в котором необходимо провести процедуру абляции и деструкции, отличающийся тем, что предварительно перед размещением диэлектрического тела внутри отражающего экрана, внутрь объема, ограниченного отражающим экраном, помещают объемный поглотитель, возбуждают каждый из излучателей излучением малой мощности с длиной волны λС=2rФ, где rФ - заданный радиус фокального пятна; λС - длина волны поля в диэлектрике без потерь, и настраивают каждый излучатель на режим бегущей волны, удаляют объемный поглотитель, затем производят настройку излучателей на выбранные точки фокусировки, для чего возбуждают первый излучатель сигналом с произвольной амплитудой  и фазой
и фазой  , где
, где  - радиус-вектор первой точки фокусировки относительно начала выбранной системы координат, запоминают амплитуды ,
- радиус-вектор первой точки фокусировки относительно начала выбранной системы координат, запоминают амплитуды ,  и фазы ,
и фазы ,  соответственно падающего излучения и излучения, отраженного от участка воздействия на диэлектрическом теле, затем при возбужденном первом излучателе возбуждают второй излучатель сигналом с произвольной комплексной амплитудой
соответственно падающего излучения и излучения, отраженного от участка воздействия на диэлектрическом теле, затем при возбужденном первом излучателе возбуждают второй излучатель сигналом с произвольной комплексной амплитудой  , измеряют амплитуду
, измеряют амплитуду  и фазу
и фазу  излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны
излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны  до выполнения соотношений:
до выполнения соотношений:  ,
,  , где * - знак комплексного сопряжения; А2 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду
, где * - знак комплексного сопряжения; А2 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду  и фазу
и фазу  падающей волны, после этого при возбужденных первом и втором излучателях возбуждают третий излучатель сигналом с произвольной амплитудой
падающей волны, после этого при возбужденных первом и втором излучателях возбуждают третий излучатель сигналом с произвольной амплитудой  и фазой
и фазой  , измеряют амплитуду
, измеряют амплитуду  и фазу
и фазу  излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны
излучения, отраженного от участка воздействия на диэлектрическом теле, при этом изменяют значение амплитуды падающей волны  до выполнения соотношений:
до выполнения соотношений:  ,
,  , где А3 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду и фазу
, где А3 - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду и фазу  падающей волны, далее последовательно возбуждают аналогичным образом остальные излучатели, подстраивая амплитуды и фазы падающей волны до выполнения, соответственно, соотношений:
падающей волны, далее последовательно возбуждают аналогичным образом остальные излучатели, подстраивая амплитуды и фазы падающей волны до выполнения, соответственно, соотношений:  ,
,  , j=4,…n, где n - общее количество излучателей; Aj - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду
, j=4,…n, где n - общее количество излучателей; Aj - постоянный коэффициент, определяемый в процессе настройки, запоминают амплитуду  и фазу
и фазу  падающей волны, проверяют местонахождение заданной точки фокусировки относительно выбранного участка диэлектрического тела, и при отрицательном результате процедуры фокусировки излучателей повторяют заново, при положительном результате производят запись параметров фокусировки - амплитуду и фазу каждого из излучателей, далее осуществляют процедуры фокусировки всех излучателей для заданного количества М точек фокусировки на участке воздействия на диэлектрическом теле и запоминание параметров фокусировки при расположении точки М' абляции и деструкции вне М точек фокусировки, находящихся в области тетраэдра, вершины которого совпадают с координатами
падающей волны, проверяют местонахождение заданной точки фокусировки относительно выбранного участка диэлектрического тела, и при отрицательном результате процедуры фокусировки излучателей повторяют заново, при положительном результате производят запись параметров фокусировки - амплитуду и фазу каждого из излучателей, далее осуществляют процедуры фокусировки всех излучателей для заданного количества М точек фокусировки на участке воздействия на диэлектрическом теле и запоминание параметров фокусировки при расположении точки М' абляции и деструкции вне М точек фокусировки, находящихся в области тетраэдра, вершины которого совпадают с координатами  ,
,  ,
,  ,
,  , ближайших к точке М', причем расстояние от точки М' до точек с координатами , , , является наименьшим среди всех возможных точек m=1,…М, определяют и записывают их комплексные амплитуды
, ближайших к точке М', причем расстояние от точки М' до точек с координатами , , , является наименьшим среди всех возможных точек m=1,…М, определяют и записывают их комплексные амплитуды  путем интерполяции:
путем интерполяции:
 ,
,


где  ,
,  ,
,  - радиус-векторы соответствующих точек;
- радиус-векторы соответствующих точек;  - расстояние между точками m3 и m2;
- расстояние между точками m3 и m2;  - расстояние между точками m3 и М''';
- расстояние между точками m3 и М''';  - расстояние между точками m1 и М''';
- расстояние между точками m1 и М''';  - расстояние между точками m1 и М'';
- расстояние между точками m1 и М'';  - расстояние между точками m4 и М'';
- расстояние между точками m4 и М'';  - расстояние между точками m4 и М'; после чего увеличивают мощность излучения до величины, необходимой для осуществления абляции и деструкции в указанной области и безвредной вне указанной области, и осуществляют абляцию и деструкцию в указанных точках, при этом радиус кривизны а отражающего экрана выбирают из условия
- расстояние между точками m4 и М'; после чего увеличивают мощность излучения до величины, необходимой для осуществления абляции и деструкции в указанной области и безвредной вне указанной области, и осуществляют абляцию и деструкцию в указанных точках, при этом радиус кривизны а отражающего экрана выбирают из условия  , где адиэл - радиус диэлектрического тела;
, где адиэл - радиус диэлектрического тела;  - оптимальный радиус, при котором при заданной мощности поля излучателей, расположенных на отражающем экране в точке фокусировки диэлектрического тела, достигается максимальное значение плотности потока мощности поля; радиус а1 совместно с величиной aopt определяют возможный интервал выбора радиуса а отражающего экрана; величина а1 зависит от допустимого уровня рДОП Н плотности потока мощности рН(а) на периферии диэлектрического тела, нормированной к аналогичному параметру p(0) в точке фокусировки и определяется из условий
- оптимальный радиус, при котором при заданной мощности поля излучателей, расположенных на отражающем экране в точке фокусировки диэлектрического тела, достигается максимальное значение плотности потока мощности поля; радиус а1 совместно с величиной aopt определяют возможный интервал выбора радиуса а отражающего экрана; величина а1 зависит от допустимого уровня рДОП Н плотности потока мощности рН(а) на периферии диэлектрического тела, нормированной к аналогичному параметру p(0) в точке фокусировки и определяется из условий


tgΔ(λС) - угол диэлектрических потерь в среде для используемого типа поля.
2. Способ по п.1, отличающийся тем, что при определении координат сфокусированных m=1,…М точек и необходимых комплексных амплитуд возбуждения  учитывают зависимость координат
учитывают зависимость координат  от времени t.
от времени t.
3. Способ по п.1, отличающийся тем, что в качестве воздействующего излучения используют ультразвуковое поле или электромагнитное поле.
4. Способ по п.1, отличающийся тем, что поверхность отражающего экрана имеет цилиндрическую или сферическую форму или форму, совпадающую с поверхностью диэлектрического тела.
5. Способ по п.1, отличающийся тем, что для возбуждения излучателей используют гармоническое или импульсное излучение.
6. Способ по п.1, отличающийся тем, что дополнительно увеличивают радиус точки абляции и деструкции путем расфокусировки излучателей.
7. Устройство для неинвазивной абляции и деструкции участков диэлектрического тела с потерями, содержащее генератор, вход управления которого соединен с блоком управления и вычисления, подсоединенным к блоку визуализации, АЦП и излучатели, размещенные на поверхности отражающего экрана, отличающееся тем, что в него введены последовательно соединенные n-канальный делитель мощности, n-канальный коммутатор каналов и n-канальный блок управления возбуждением излучателей, выходы которого подключены соответственно к n-излучателям, при этом выход генератора через АЦП подсоединен к входу n-канального делителя мощности, управляющие входы n-канального делителя мощности, n-канального коммутатора каналов и n-канального блока управления возбуждением излучателей соединены соответственно с управляющими выходами блока управления и вычисления, первый и второй информационные входы которого подсоединены соответственно к информационным выходам n-канального блока управления возбуждением излучателей, каждый из каналов n-канального блока управления возбуждением излучателей состоит из последовательно соединенных блока управления амплитудой сигнала, вход которого является входом соответствующего канала n-канального блока управления возбуждением излучателей, блока управления фазой сигнала, блока развязки и коммутатора, блока сравнения падающей и отраженной волн и последовательно соединенных измерителя КБВ и управляемого согласующего блока, выход которого является выходом соответствующего канала n-канального блока управления возбуждением излучателей, первый вход блока сравнения падающей и отраженной волн соединен с выходом блока управления фазой сигнала, а его второй вход соединен с вторым выходом блока развязки, выход коммутатора через нормально замкнутый контакт подключен к выходу соответствующего канала n-канального блока управления возбуждением излучателей, а через нормально разомкнутый контакт - с входом измерителя КБВ, при этом управляющие входы блока управления амплитудой сигнала, блока управления фазой сигнала и управляемого согласующего блока являются управляющими входами соответствующего канала n-канального блока управления возбуждением излучателей, а выходы блока сравнения падающей и отраженной волн и измерителя КБВ являются информационными выходами n-канального блока управления возбуждением излучателей.
8. Устройство по п.7, отличающееся тем, что генератор выполнен в виде источника электромагнитного излучения или в виде источника ультразвукового излучения.
9. Устройство по п.7, отличающееся тем, что поверхность отражающего экрана имеет цилиндрическую или сферическую форму или форму, совпадающую с поверхностью диэлектрического тела.
| СПОСОБ СЕЛЕКТИВНОЙ ДЕСТРУКЦИИ РАКОВЫХ КЛЕТОК | 1999 |
|
RU2147848C1 |
| СПОСОБ ИЗБИРАТЕЛЬНОЙ ДЕСТРУКЦИИ РАКОВЫХ КЛЕТОК | 1996 |
|
RU2106159C1 |
| СПОСОБ ЛЕЧЕНИЯ ДОБРОКАЧЕСТВЕННОЙ ГИПЕРПЛАЗИИ ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ | 1997 |
|
RU2165239C2 |
| US 5601526 A, 11.02.1997 | |||
| WO 2010119340 A1, 21.10.2010. | |||

