Изобретение относится к области авиации, а именно к летным исследованиям летательных аппаратов (ЛА), в которых используются тросовые системы (ТС), состоящие из буксировщика-ЛА, троса и буксируемого объекта (БО). В процессе летных исследований часто возникает проблема посадки объекта, буксируемого на тросе, в заданное место, что может быть достигнуто при полете буксировщика по кругу с достаточно длинным тросом, на конце которого закрепляется БО, кроме того, концепция круговой буксировки применяется для отработки систем противовоздушной обороны.
Изучение процесса буксировки с математической точки зрения было проведено американскими учеными (Richard A. Skop and Young-il Choo. The Configuration of a Cable Towed in Circular Path, J. Aircraft Vol.8, No.11, pp 856-862, November 1971), которые вывели уравнения установившегося движения тросовой системы в осях естественного трехгранника с углами ориентации, не принятыми в авиационной практике, которые связаны с углами атаки и скольжения следующими тригонометрическими соотношениями:
sinφ sinψ=sinα
sinφ cosψ=-sinβ cosα,
что усложняет анализ движения ТС, также процесс круговой буксировки представлен в этой работе только с теоретической точки зрения без каких-либо рекомендаций к практическому применению.
Наиболее близким, принятым за прототип для предлагаемого способа является способ, описанный в патенте на изобретение: the US patent № 3373994, 19/03/1968, «Method of achieving vertical displacement of a towed target from a towing aircraft». Данный способ применен для выдерживания допустимого принижения БО относительно буксировщика, которое обеспечит безопасность буксировщика при отработке систем противовоздушной обороны, где в качестве мишени используется БО. Недостатком данного метода является то, что он не обеспечивает точную доставку полезных грузов.
Технический результат, на достижение которого направлено изобретение, - обеспечение точной доставки полезных грузов, т.е. выдача рекомендаций о требуемых параметрах движения буксировщика, физических характеристиках троса и уменьшение затрат при проведении летного эксперимента с использованием ТС.
Для достижения названного технического результата в предлагаемом способе определения параметров движения по кругу авиационной буксировочной ТС, состоящей из буксировщика-ЛА, БО и соединяющего их троса, включающем выдачу рекомендаций о требуемых параметрах движения буксировщика-ЛА, физических характеристиках троса, при которых имеет место допустимое принижение БО относительно буксировщика-ЛА, предварительно производят расчет для любой точки на тросе: углов атаки и скольжения, силы натяжения по следующему уравнению движения единицы длины троса в инерциальных координатах:
затем определяют радиус вращения по уравнению:

фазовый сдвиг по уравнению:

и расстояние от текущей точки на тросе до буксировщика (принижение) по уравнению:
где  - вектор скорости,
- вектор скорости,
m - масса,
t - время,
 - вектор силы натяжения,
- вектор силы натяжения,
s - координата, соответствующая длине, заключенной между БО и текущей точкой на тросе,
YБО, RБО - принижение и радиус вращения БО соответственно (при s=0),
 - результирующий вектор аэродинамической силы и веса,
- результирующий вектор аэродинамической силы и веса,
α - угол наклона в вертикальной плоскости (угол атаки),
β - угол скольжения.
По результатам математического моделирования с использованием системы уравнений движения троса (1-4) вычисляют параметры движения ТС и выдают рекомендации о параметрах движения буксировщика-ЛА и физических характеристиках троса, соответствующих допустимым большому принижению YБО, малым значениям радиуса RБО и скорости вращения БО, для обеспечения точной доставки полезных грузов без их разрушения.
Заявленный способ поясняется на следующих фигурах:
фиг.1: Схема буксировки ТС, состоящей из буксировщика 1, троса 2, БО 3 и вращающаяся цилиндрическая система координат RθY,
фиг.2: Зависимость относительного принижения БО от безразмерной длины троса (пример 1).
фиг.3: Зависимость безразмерного радиуса вращения БО от безразмерной длины троса (пример 1).
фиг.4: Траектории полета вертолета-буксировщика и БО в плане (пример 2).
Способ осуществляется следующим образом.
Для определения параметров движения ТС (см. фиг. 1) в качестве входных параметров вводят данные самолета-буксировщика (СБ) 1: скорость VСБ, радиус вращения RСБ, высота, предварительно вводят физические параметры троса 2: длину l, диаметр d, вес mg единицы его длины и коэффициенты лобового сопротивления CD и поверхностного трения СT, а также физические характеристики БО 3: масса mБО, площадь sБО и аэродинамические: коэффициенты подъемной силы и сопротивления Су, Сх.
С учетом характеристик БО и действующих на него сил: тяжести, аэродинамической, центробежной и тяги двигателя (если БО оснащен двигателем), определяют начальные значения углов атаки α0 и скольжения β0, силы натяжения Т0 троса по уравнениям (5-7), то есть граничные условия для задачи определения параметров движения троса.
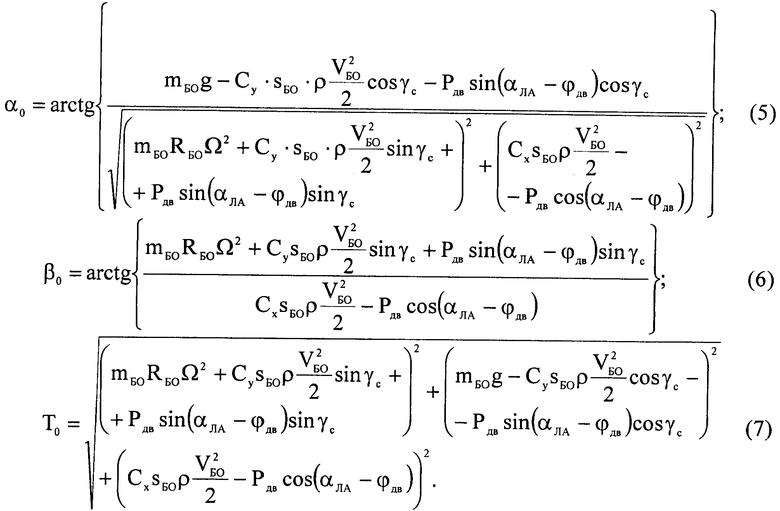
где RБО - радиус вращения БО;
VБО - скорость БО;
Рдв - сила тяги двигателя БО;
φдв - угол установки двигателя БО;
αла - угол атаки БО;
γc - угол скоростного крена БО;
ρ - плотность атмосферы;
Ω - угловая скорость вращения ТС.
С использованием начальных данных из уравнения движения (1), записанного в координатной форме (с учетом знака углов α и β), определяют углы атаки и скольжения, а также силу натяжения для любой точки на тросе:



Радиус вращения, фазовый сдвиг и принижение точки на тросе определяют по уравнениям (2-4).
Величина радиуса вращения БО RБО изначально неизвестна, однако можно задать его величину и интегрировать дифференциальные уравнения из точки крепления БО (s=0) до точки крепления буксировщика (s=l). Если величина радиуса вращения буксировщика, полученная в результате интегрирования, отличается от заданного радиуса вращения буксировщика, принимается другая начальная величина RБО, и эта процедура повторяется до тех пор, пока разница между вычисленным и заданным радиусом вращения буксировщика не станет меньше некоторой небольшой наперед заданной величины.
Три величины существенно влияют на параметры движения тросовой системы - радиус вращения буксировщика RСБ, скорость VСБ (или индикаторная скорость ViСБ) и длина троса l.
Для определения обобщенных комбинаций параметров, влияющих на процесс круговой буксировки, результаты моделирования представляют в безразмерном виде:  - длина троса,
- длина троса,  - радиус вращения БО,
- радиус вращения БО,  принижение БО.
принижение БО.
Варьируя параметры движения буксировщика и длину троса, можно подобрать комбинации параметров, при которых БО будет иметь положение равновесия, близкое к оси вращения, при этом малая величина радиуса и скорости вращения БО будет сопровождаться большим наклоном троса, что позволит осуществлять точную доставку полезного груза без его разрушения.
Примеры
1. Приведем результаты моделирования: зависимости относительного принижения БО 4 (фиг.2) и безразмерного радиуса вращения БО 5 (фиг.3) от безразмерной длины троса с диаметром d=0,0099 м (mg=0,4 кг/м) и БО массой mБО=310 кгс2/м с радиусом вращения буксировщика RСБ=1000 м и скоростью VСБ=360 км/ч, для длины троса l≤10000 м (λ≤10). Результаты расчета показывают, что при используемых параметрах движения буксировщика допустимый радиус вращения  и большое принижение достигается при λ=6 (l=6000 м), с дальнейшим увеличением длины троса радиус вращения и принижение БО будут незначительно уменьшаться по сравнению с длиной троса, поэтому целесообразно выбирать минимальную длину троса при достижении допустимых для посадки параметров.
и большое принижение достигается при λ=6 (l=6000 м), с дальнейшим увеличением длины троса радиус вращения и принижение БО будут незначительно уменьшаться по сравнению с длиной троса, поэтому целесообразно выбирать минимальную длину троса при достижении допустимых для посадки параметров.
2. Приведем результаты сравнения радиусов вращения БО, рассчитанных и полученных в результате эксперимента. На фиг.4 изображены траектории буксировщика 6 и БО 7 в проекциях на земную поверхность, полученные по результатам эксперимента при длине троса l =900 м, радиусе вращения вертолета-буксировщика (ВБ) RВБ≈250 м со скоростью V=115 км/ч и БО массой mБО=4 кгс2/м. Здесь же показаны траектории ВБ 8 и БО 9, полученные при математическом моделировании. На фигуре видно, что экспериментальные и расчетные радиусы БО близки друг к другу, но несколько смещены относительно друг друга вследствие влияния скорости ветра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМОЙ | 2009 |
|
RU2395430C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРОСОВОЙ СИСТЕМОЙ (САМОЛЕТ-БУКСИРОВЩИК - ТРОС - БУКСИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ) | 2007 |
|
RU2347719C1 |
| Способ увода объектов крупногабаритного космического мусора и устройство для его реализации | 2021 |
|
RU2775092C1 |
| Буксируемая система | 1988 |
|
SU1724513A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕХЛЕСТА БУКСИРУЕМОЙ ДВУХТРОСОВОЙ САМОЛЕТНОЙ АНТЕННЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658549C1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ЗАКРУТКИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ С ПОМОЩЬЮ ГРАВИТАЦИОННЫХ И ВНУТРЕННИХ СИЛ | 2012 |
|
RU2536611C2 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАТОПЛЕННОГО ТЕЛА | 2003 |
|
RU2259302C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| БУКСИРУЕМОЕ ПОДВОДНОЕ УСТРОЙСТВО С ГОРИЗОНТАЛЬНОЙ СТАБИЛИЗАЦИЕЙ | 1999 |
|
RU2148003C1 |
Изобретение относится к области авиации, а именно к летным исследованиям летательных аппаратов (ЛА), в которых используются тросовые системы (ТС), состоящие из буксировщика-ЛА, троса и буксируемого объекта (БО). В способе предварительно производят расчет для любой точки на тросе: углов атаки и скольжения, силы натяжения, по следующему уравнению движения единицы длины троса в инерциальных координатах:  . Определяют радиус вращения:
. Определяют радиус вращения:  , фазовый сдвиг:
, фазовый сдвиг:  , и расстояние от текущей точки на тросе до буксировщика (принижение):
, и расстояние от текущей точки на тросе до буксировщика (принижение):  где
где  - вектор скорости, m - масса, t - время,
- вектор скорости, m - масса, t - время,  - вектор силы натяжения, s - координата, соответствующая длине, заключенной между БО и текущей точкой на тросе. По результатам математического моделирования с использованием системы уравнений движения троса вычисляют параметры движения ТС. Выдают рекомендации о параметрах движения буксировщика-ЛА и физических характеристиках троса, соответствующих допустимым большому принижению YБО, малым значениям радиуса RБО и скорости вращения БО. Достигается обеспечение точной доставки полезных грузов и уменьшение затрат при проведении летного эксперимента с использованием ТС. 4 ил.
- вектор силы натяжения, s - координата, соответствующая длине, заключенной между БО и текущей точкой на тросе. По результатам математического моделирования с использованием системы уравнений движения троса вычисляют параметры движения ТС. Выдают рекомендации о параметрах движения буксировщика-ЛА и физических характеристиках троса, соответствующих допустимым большому принижению YБО, малым значениям радиуса RБО и скорости вращения БО. Достигается обеспечение точной доставки полезных грузов и уменьшение затрат при проведении летного эксперимента с использованием ТС. 4 ил.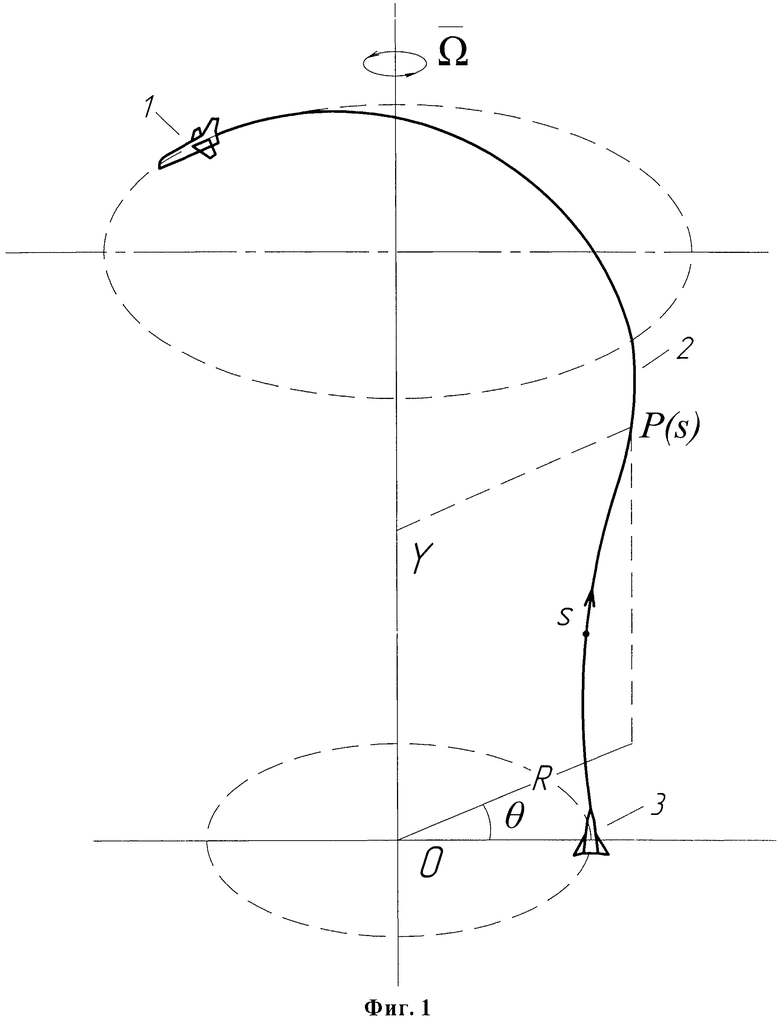
Способ определения параметров движения по кругу авиационной буксировочной тросовой системы (ТС), состоящей из буксировщика - летательного аппарата (ЛА), буксируемого объекта (БО) и соединяющего их троса, включающий выдачу рекомендаций о требуемых параметрах движения буксировщика-ЛА, физических характеристиках троса, при которых имеет место, допустимое принижение БО относительно буксировщика-ЛА, отличающийся тем, что предварительно производят расчет для любой точки на тросе: углов атаки и скольжения, силы натяжения по следующему уравнению движения единицы длины троса в инерциальных координатах:
затем определяют радиус вращения по уравнению:
фазовый сдвиг по уравнению:
и расстояние от текущей точки на тросе до буксировщика (принижение) по уравнению:
где  - вектор скорости,
- вектор скорости,
m - масса,
t - время,
 - вектор силы натяжения,
- вектор силы натяжения,
s - координата, соответствующая длине, заключенной между БО и текущей точкой на тросе,
YБО, RБО - принижение и радиус вращения БО соответственно (при s=0),
 - результирующий вектор аэродинамической силы и веса,
- результирующий вектор аэродинамической силы и веса,
α - угол наклона в вертикальной плоскости (угол атаки),
β - угол скольжения,
по результатам математического моделирования с использованием системы уравнений движения троса (1-4) вычисляют параметры движения ТС и выдают рекомендации о параметрах движения буксировщика-ЛА и физических характеристиках троса, соответствующих допустимым большому принижению YБО, малым значениям радиуса RБО и скорости вращения БО, для обеспечения точной доставки полезных грузов без их разрушения.
| US 3373994 А, 19.03.1968 | |||
| СПОСОБ УПРАВЛЕНИЯ ТРОСОВОЙ СИСТЕМОЙ (САМОЛЕТ-БУКСИРОВЩИК - ТРОС - БУКСИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ) | 2007 |
|
RU2347719C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМОЙ | 2009 |
|
RU2395430C1 |

