Изобретение относится к авиационной технике, в частности к конструкции буксируемых устройств, и может быть использовано при буксировке тел в нижней полуплоскости на границе с верхней полуплоскостью, а также при стабилизации гибкой системы по направлению потока с помощью буксируемого тела.
Известна буксируемая система, содержащая гибкую связь, с одной стороны соединенную с буксировщиком, а с другой - с буксируемым телом с управляющими тормозными поверхностями, на котором распо- ложена система управления им в продольной плоскости, выполненная в виде расположенного на буксируемом теле датчика истинной высоты буксируемого тела и расположенного на буксировщике задатчи- ка положения буксируемого тела по высоте, соединенных через расположенные на буксируемом теле сумматор-усилитель, сервоп- ривод с управляющими тормозными поверхностями, недостатком которой является низкая безопасность при огибании буксируемым телом препятствий, расположенных на незначительном расстоянии от буксировщика, из-за отсутствия несущих плоскостей на буксируемом теле, не позволяющих создать подъемную силу требуемой величины, так как изменение высоты буксируемого тела обеспечивается увеличением его лобового сопротивления после отклонения управляющих тормозных поверхностей.
Наиболее близкой по технической сущности является буксируемая система, содержащая гибкую связь, с одной стороны соединенную с буксировщиком, а с другой i стороны - с буксируемым телом с несущими управляющими плоскостями, на котором расположена система управления им в продольной плоскости, выполненная в виде расположенного на буксируемом теле датчика истинной высоты буксируемого тела и расположенного на буксировщике задатчи- ка положения буксируемого тела по высоте, соединенных через расположенные на буксируемом теле сумматор-усилитель, сервоп- ривод с несущими управляющими поверхностями буксируемого тела.
Данная система, хотя и позволяет создать подъемную силу требуемой величины за счет наличия несущих управляющих плоскостей (крыльев на буксируемом теле), имеет низкую безопасность при буксировке тела в нижней полуплоскости на границе с верхней из-за его неустойчивости при изменении высоты буксируемого тела и возможном переходе в верхнюю полуплоскость. При этом при буксировке тела в нижней
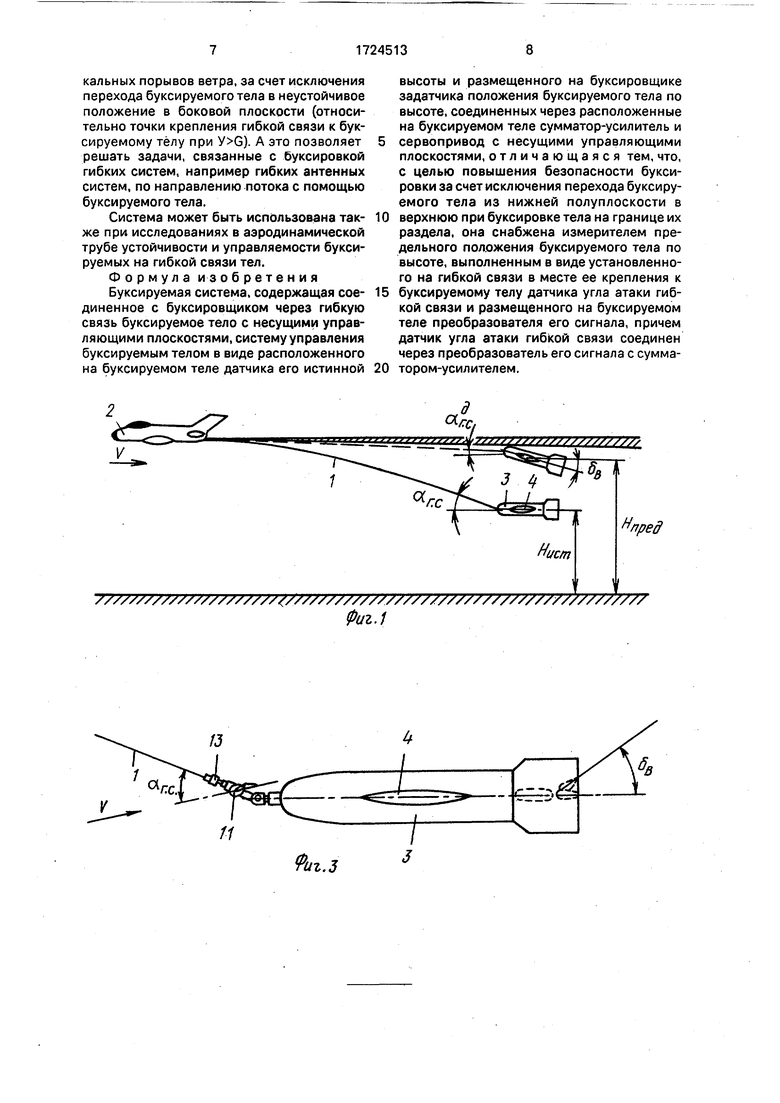
полуплоскости относительно верхней и при отклонении буксируемого тела в боковой плоскости оно возвращается в исходное положение под действием касательной составляющей R вектора боковой силы Z. В этом случае Y G, где Y - подъемная сила, .g, где m - масса тела; g - ускорение силы тяжести. Вектор боковой , равный сумме векторов подъемной силы Y и
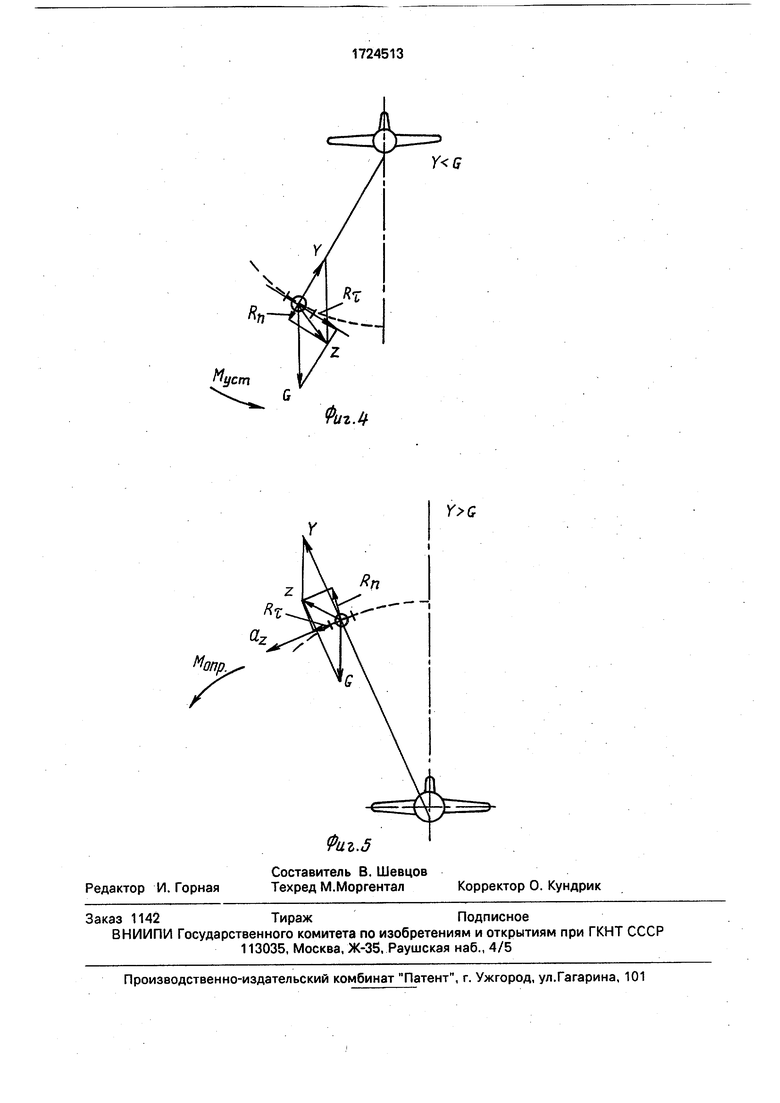
силы веса G,раскладывается на две составляющие к траектории движения буксируемого тела. При буксировке тела с превышением буксируемого тела касательная составляющая вектора боковой
силы Z при действии на тело возмущений создает ускорение az, приводящее к неустойчивому боковому движению и созданию аварийной ситуации.
Целью изобретения является повышение безопасности буксировки за счет исключения перехода буксируемого тела из нижней полуплоскости в верхнюю при буксировке тела на границе этих полуплоскостей.
Поставленная цель достигается тем, что буксируемая система, содержащая гибкую связь, с одной стороны соединенную с буксировщиком, а с другой стороны - с буксируемым телом с несущими управляющими плоскостями, на котором расположена система управления им в продольной плоскости, выполненная в виде расположенного на буксируемом теле датчика истинной высоты
буксируемого тела и расположенного на буксировщике задатчика положения буксируемого тела по высоте, соединенных через расположенные на буксируемом теле сумматор-усилитель, сервопривод с несущими
управляющими плоскостями буксируемого тела, снабжена измерителем предельного положения буксируемого тела по высоте, выполненным в виде установленного на гибкой связи в месте ее крепления к буксируемому телу датчика угла атаки гибкой связи и преобразователя его сигнала, размещенного на буксируемом теле, причем датчик угла атаки гибкой связи соединен, через преобразователь его сигнала с сумматором-усилителем.
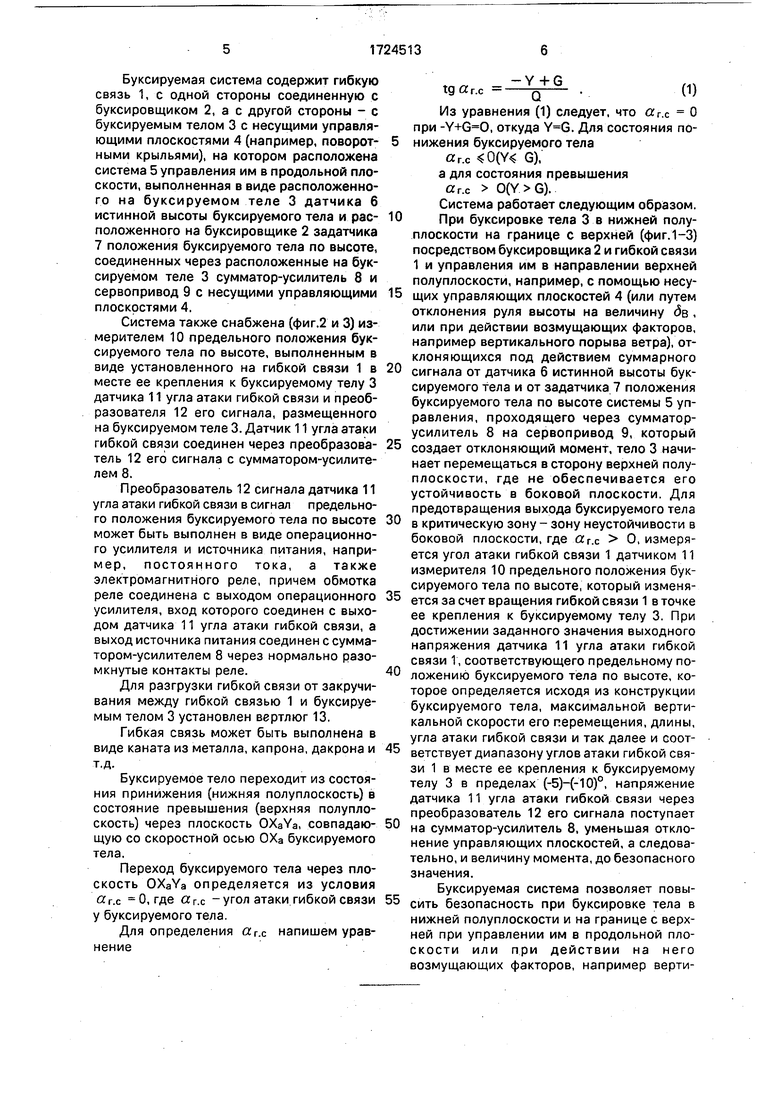
На фиг. 1 показана предлагаемая система, общий вид; на фиг.2 - блок-схема связи измерителя предельного положения буксируемого тела по высоте с системой управления им в продольной плоскости; на фиг.З - конструкция крепления датчика угла атаки к гибкой связи; на фиг.4 - схема сил, действующих на буксируемое тело в нижней полуплоскости; на фиг.5 - схема сил,
действующих на буксируемое тело в верхней полуплоскости.
Буксируемая система содержит гибкую связь 1, с одной стороны соединенную с буксировщиком 2, а с другой стороны - с буксируемым телом 3 с несущими управляющими плоскостями 4 (например, поворотными крыльями), на котором расположена система 5 управления им в продольной плоскости, выполненная в виде расположенного на буксируемом теле 3 датчика 6 истинной высоты буксируемого тела и расположенного на буксировщике 2 задатчика 7 положения буксируемого тела по высоте, соединенных через расположенные на буксируемом теле 3 сумматор-усилитель 8 и сервопривод 9 с несущими управляющими плоскостями 4.
Система также снабжена (фиг.2 и 3) измерителем 10 предельного положения буксируемого тела по высоте, выполненным в виде установленного на гибкой связи 1 в месте ее крепления к буксируемому телу 3 датчика 11 угла атаки гибкой связи и преобразователя 12 его сигнала, размещенного на буксируемом теле 3. Датчик 11 угла атаки гибкой связи соединен через преобразователь 12 его сигнала с сумматором-усилителем 8.
Преобразователь 12 сигнала датчика 11 угла атаки гибкой связи в сигнал предельного положения буксируемого тела по высоте может быть выполнен в виде операционного усилителя и источника питания, например, постоянного тока, а также электромагнитного реле, причем обмотка реле соединена с выходом операционного усилителя, вход которого соединен с выходом датчика 11 угла атаки гибкой связи, а выход источника питания соединен с сумматором-усилителем 8 через нормально разомкнутые контакты реле.
Для разгрузки гибкой связи от закручивания между гибкой связью 1 и буксируемым телом 3 установлен вертлюг 13,
Гибкая связь может быть выполнена в виде каната из металла, капрона, дакрона и т.д.
Буксируемое тело переходит из состояния принижения (нижняя полуплоскость) в состояние превышения (верхняя полуплоскость) через плоскость OXaYa, совпадающую со скоростной осью ОХа буксируемого тела.
Переход буксируемого тела через плоскость OXaYa определяется из условия а.г.с 0, где (Хг.с -угол атаки гибкой связи у буксируемого тела.
Для определения аг.с напишем уравнение
tgctr.c
-Y+G Q
(D
Из уравнения (1) следует, что аг.с 0 при , откуда . Для состояния понижения буксируемого тела а г.с «ООгЧ G), а для состояния превышения аг.с 0(). Система работает следующим образом.
При буксировке тела 3 в нижней полуплоскости на границе с верхней (фиг. 1-3) посредством буксировщика 2 и гибкой связи 1 и управления им в направлении верхней полуплоскости, например, с помощью несущих управляющих плоскостей 4 (или путем отклонения руля высоты на величину 5в , или при действии возмущающих факторов, например вертикального порыва ветра), отклоняющихся под действием суммарного
сигнала от датчика б истинной высоты буксируемого тела и от задатчика 7 положения буксируемого тела по высоте системы 5 управления, проходящего через сумматор- усилитель 8 на сервопривод 9, который
создает отклоняющий момент, тело 3 начинает перемещаться в сторону верхней полуплоскости, где не обеспечивается его устойчивость в боковой плоскости. Для предотвращения выхода буксируемого тела
в критическую зону - зону неустойчивости в боковой плоскости, где а(.с О, измеряется угол атаки гибкой связи 1 датчиком 11 измерителя 10 предельного положения буксируемого тела по высоте, который изменяется за счет вращения гибкой связи 1 в точке ее крепления к буксируемому телу 3. При достижении заданного значения выходного напряжения датчика 11 угла атаки гибкой связи 1, соответствующего предельному положению буксируемого тела по высоте, которое определяется исходя из конструкции буксируемого тела, максимальной вертикальной скорости его перемещения, длины, угла атаки гибкой связи и так далее и GOOTветствует диапазону углов атаки гибкой связи 1 в месте ее крепления к буксируемому телу 3 в пределах (-5)-(-10)°, напряжение датчика 11 угла атаки гибкой связи через преобразователь 12 его сигнала поступает
на сумматор-усилитель 8, уменьшая отклонение управляющих плоскостей, а следовательно, и величину момента, до безопасного значения.
Буксируемая система позволяет повысить безопасность при буксировке тела в нижней полуплоскости и на границе с верхней при управлении им в продольной плоскости или при действии на него возмущающих факторов, например вертикальных порывов ветра, за счет исключения перехода буксируемого тела в неустойчивое положение в боковой плоскости (относительно точки крепления гибкой связи к буксируемому телу при ). А это позволяет решать задачи, связанные с буксировкой гибких систем, например гибких антенных систем, по направлению потока с помощью буксируемого тела.
Система может быть использована так- же при исследованиях в аэродинамической трубе устойчивости и управляемости буксируемых на гибкой связи тел.
Формул а изо б ре тен и я Буксируемая система, содержащая сое- диненное с буксировщиком через гибкую связь буксируемое тело с несущими управляющими плоскостями, систему управления буксируемым телом в виде расположенного на буксируемом теле датчика его истинной
высоты и размещенного на буксировщике задатчика положения буксируемого тела по высоте, соединенных через расположенные на буксируемом теле сумматор-усилитель и сервопривод с несущими управляющими плоскостями, отличающаяся тем, что, с целью повышения безопасности буксировки за счет исключения перехода буксируемого тела из нижней полуплоскости в верхнюю при буксировке тела на границе их раздела, она снабжена измерителем предельного положения буксируемого тела по высоте, выполненным в виде установленного на гибкой связи в месте ее крепления к буксируемому телу датчика угла атаки гибкой связи и размещенного на буксируемом теле преобразователя его сигнала, причем датчик угла атаки гибкой связи соединен через преобразователь его сигнала с сумма- тором-у си л ител ем.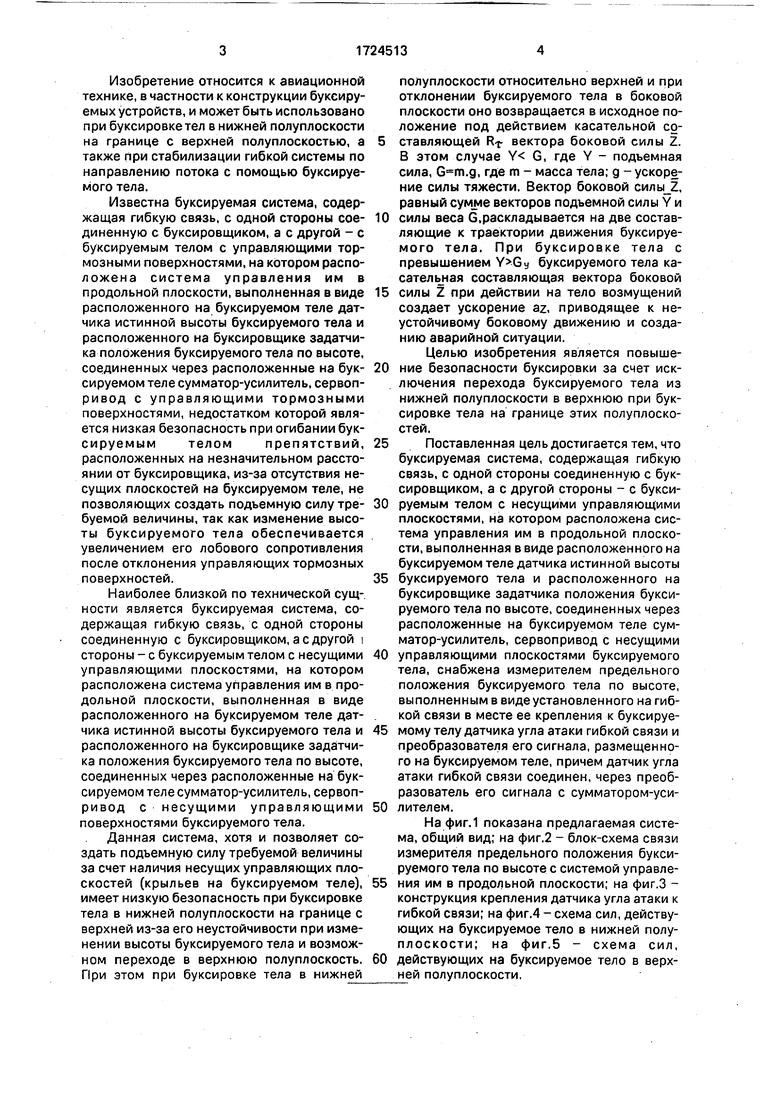
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ТЕЛА | 1988 |
|
SU1619602A1 |
| Устройство для буксировки тела | 1990 |
|
SU1707895A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРОСОВОЙ СИСТЕМОЙ (САМОЛЕТ-БУКСИРОВЩИК - ТРОС - БУКСИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ) | 2007 |
|
RU2347719C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Стабилизатор глубины погружения буксируемого в воде объекта | 1973 |
|
SU603932A1 |
| БУКСИРУЕМАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
SU1746632A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
Изобретение относится к авиационной технике, в частности к конструкциям буксируемых устройств, и может быть использовано при буксировке тел в нижней полуплоскости на границе с верхней полуплоскостью, а также при стабилизации гибкой системы по направлению потока с помощью буксируемого тела. Цель изобретения - повышение безопасности буксировки за счет исключения перехода буксируемого тела из нижней полуплоскости в верхнюю при буксировке тела на границе их раздела. Датчик 11 угла атаки гибкой связи, установленный в месте ее крепления к буксируемому телу, с преобразователем 12 его сигнала служат ограничителем предельной высоты буксировки. При достижении нулевого угла атаки, соответствующего границе неустойчивой буксировки тела, сигнал с датчика 11 через преобразователь 12 поступает на сумматор-усилитель 8, связанный с сервоприводом 9, который, поворачивая управляющие плоскости, обеспечивает снижение тела до безопасной высоты. 5 ил. сл С
Фиг.1
Риг.З
| СПОСОБ БЕЗОТХОДНОГО УПОТРЕБЛЕНИЯ КУСКА МЫЛА | 2016 |
|
RU2613953C1 |
| Механический грохот | 1922 |
|
SU41A1 |
| Патент США № 3560912, кл.340-3, 1971. | |||
