Изобретение, в общем, относится к системе для управления гидравлической системой, более конкретно к способу и устройству для управления гидравлической системой.
Машины, такие как, например, экскаваторы, погрузчики, бульдозеры и другие типы тяжелых машин, обычно имеют большое количество гидравлически управляемого оборудования (такого как, например, ковш, грейфер или молот), избирательно закрепляемого на машине. Гидравлические системы, управляющие инструментами, обычно содержат множество гидравлических приводов (например, узлы типа поршень-цилиндр и/или гидравлические двигатели), которые работают совместно с системой соединения для обеспечения движения и операций инструмента. Движениями гидравлических приводов управляют с помощью различных устройств ввода оператора, таких как один или более рычагов управления, ножных педалей, переключателей или джойстиков.
В дополнение к избирательно закрепляемым инструментам система соединения также может быть заменена. Типы инструментов и системы соединения, закрепляемые на машине, а также соединители, которые закрепляют инструменты на машине, часто имеют разную форму, размеры, вес и/или другие свойства. При этом различные комбинации инструментов и систем соединения (то есть разные конфигурации оборудования) могут влиять на управление движением машины и по-разному реагировать на команды, вводимые оператором. Например, относительно тяжелый инструмент и/или относительно длинная система соединения могут устанавливать относительно больший момент силы, вызванный конфигурацией оборудования вокруг машины, по сравнению с относительно легким инструментом и/или более короткой системой соединения.
Один способ улучшения управления движением инструментов описан в патенте US №5784945 (Krone и др.) В указанном патенте описано устройство для определения кривой преобразования клапана в жидкостной системе. Жидкостная система содержит жидкостный привод с клапаном, выполненный с возможностью инициировать движение нагрузки. Система в соответствии с указанным патентом определяет требуемую скорость жидкостного привода на основе измеренной нагрузки или положения жидкостного привода и генерирует кривую преобразования клапана для достижения требуемой скорости.
Хотя система в соответствии патентом US №5784945 может улучшить управление движением жидкостного привода для разных нагрузок, ассоциированных с приводом, система в соответствии с указанным патентом не обеспечивает гибкость при управлении разными конфигурациями оборудования через одну и ту же машину. Например, одна конфигурация оборудования может функционировать нежелательно при заданной взаимосвязи положения/нагрузки/скорости команды входного устройства по сравнению с другой конфигурацией оборудования, которая может быть закреплена на той же машине. Кроме того, система в соответствии с указанным патентом может не обеспечивать возможность модификации взаимосвязи скорости жидкостного привода или ее выбора на основе разного инструмента и конфигураций соединения.
Раскрытые способ и устройство направлены на преодоление одного или более недостатков, указанных выше, или других недостатков предшествующего уровня техники.
Один аспект настоящего изобретения относится к способу работы гидравлической системы. Способ включает удержание конфигурации оборудования в определенной ориентации. Способ также включает измерение давления в камере гидравлического привода, ассоциированного с конфигурацией оборудования, когда конфигурация оборудования находится в определенной ориентации, и сравнивают первый сигнал, обозначающий первое измеренное давление, с первым значением давления. Способ дополнительно включает выбор первой функциональной взаимосвязи среди множества сохраненных функциональных взаимосвязей, если первый сигнал больше, чем первое значение давления, и выбор второй функциональной взаимосвязи среди множества сохраненных функциональных взаимосвязей, если первый сигнал меньше, чем первое значение давления. Способ включает управление гидравлическим приводом на основе выбранной функциональной взаимосвязи.
Другой аспект настоящего изобретения относится к способу работы гидравлической системы. Способ включает перемещение конфигурации оборудования в определенном движении. Способ также включает определение давления в камере гидравлического привода, ассоциированного с конфигурацией оборудования, когда конфигурацию оборудования перемещают, используя определенное движение, и сравнивают первый сигнал, обозначающий первое измеренное давление, с первым значением давления. Способ дополнительно включает выбор первой функциональной взаимосвязи среди множества сохраненных функциональных взаимосвязей, если первый сигнал больше, чем первое значение давления, и выбор второй функциональной взаимосвязи среди множества сохраненных функциональных взаимосвязей, если первый сигнал меньше, чем первое значение давления. Способ включает управление гидравлическим приводом на основе выбранной функциональной взаимосвязи.
Еще один аспект настоящего изобретения относится к машине, имеющей гидравлическую систему, включающую конфигурацию оборудования, имеющего инструмент и систему соединения. Гидравлическая система также содержит гидравлический привод, который влияет на движение компонента конфигурации оборудования. Гидравлический привод содержит первую камеру и вторую камеру. Гидравлическая система также содержит датчик, который измеряет давление в первой или второй камерах, в то время как конфигурацией оборудования управляют первым способом. Контроллер сравнивает первый сигнал, обозначающий измеренное давление с первым значением давления. Контроллер также выбирает первую функциональную взаимосвязь среди множества сохраненных функциональных взаимосвязей, если первый сигнал больше, чем первое значение давления, и выбирает вторую функциональную связь среди множества сохраненных функциональных взаимосвязей, если первый сигнал меньше, чем первое значение давления. Контроллер управляет гидравлическим приводом вторым способом, на основе выбранной функциональной взаимосвязи.
Настоящее изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - машина, согласно изобретению, схематично; фиг.2 - гидравлическая система, схематично, для машины по фиг.1; фиг.3 - блок-схема последовательности операций способа работы гидравлической системы по фиг.2.
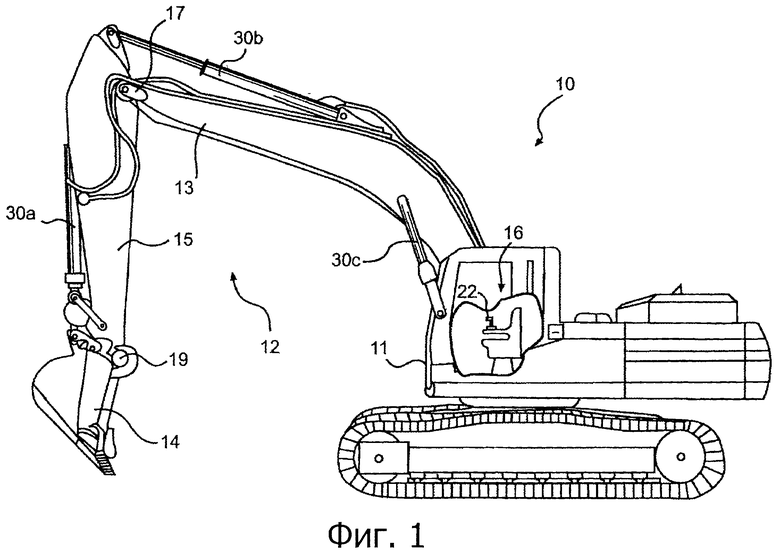
На фиг.1 иллюстрируется пример машины 10. Машина 10 может быть стационарной или мобильной машиной, которая выполняет некоторые типы операций, связанные с промышленностью, такой как горная промышленность, строительство, сельское хозяйство, транспорт или любая другая отрасль промышленности, известная в данной области техники. Например, машина 10 может представлять собой землеройную машину, такую как экскаватор, бульдозер, погрузчик, или любую другую известную машину. Машина 10 может содержать систему 12 соединения, инструмент 14, который может быть закреплен на системе 12 соединения с помощью соединителя (не показан), один или более гидравлических приводов 30а-с, взаимно соединяющих систему 12 соединения, и интерфейс 16 оператора.
Система 12 соединения может содержать любой структурный модуль, который поддерживает движение машины 10 и/или инструмента 14. Система 12 соединения содержит, например, раму 11, стрелу 13 и рычаг 15. Стрела 13 соединена с возможностью поворота на раме 11, и рычаг 15 соединен с возможностью поворота со стрелой 13 в сочленении 17. Инструмент 14 соединен с возможностью поворота с рычагом 15 в сочленении 19. Предусматривается, что система 12 соединения может, в качестве альтернативы, иметь другую конфигурацию и/или больше элементов соединения, чем представлено на фиг.1.
Инструмент 14 закреплен на рычаге 15 через соединитель (не показан), и им можно управлять через интерфейс 16 оператора. Инструмент 14 содержит любое устройство, используемое для выполнения определенной задачи, такое как, например, оборудование-ковш, грейфер, вильчатый захват или любое другое выполняющее задачу устройство, известное в данной области техники. Инструмент 14 может быть выполнен с возможностью поворота, вращения, скольжения, качания, подъема или перемещения относительно устройства 10 любым известным в данной области техники образом. Следует учесть, что множество различных типов инструмента могут быть закреплены на рычаге 15. Комбинация системы 12 соединения и инструмента 14 может воплощать конфигурацию оборудования. Различные конфигурации оборудования могут быть, в общем, разделены по категориям, например легкая, средняя, тяжелая, или компоненты конфигураций оборудования, могут быть, в общем, разделены по категориям, например легкий/средний/тяжелый инструмент, легкий/средний/тяжелый рычаг,
легкая/средняя/тяжелая стрела.
Интерфейс 16 оператора может быть выполнен с возможностью приема входных команд от оператора, обозначающих требуемые движения инструмента. В частности, интерфейс 16 оператора может содержать устройство 22 интерфейса оператора, такое как, например, многоосевой джойстик, расположенный на одной стороне станции оператора. Устройство 22 интерфейса оператора представляет собой контроллер пропорционального типа, выполненный с возможностью формирования сигнала о положении устройства интерфейса, обозначающего требуемые движения инструмента 14.
Гидравлические приводы 30а-с могут быть соединены с рамой 11, стрелой 13, рычагом 15 и/или инструментом 14. Например, как показано на фиг.1, гидравлический привод 30а может быть соединен с инструментом 14 и рычагом 15, гидравлический привод 30b может быть соединен с рычагом 15 и стрелой 13, и гидравлический привод 30с может быть соединен с рамой 11 и стрелой 13. Гидравлические приводы 30а-с могут выдвигаться и сокращаться, обеспечивая движение компонентов машины 10, с которыми они соединены. Следует учесть, что гидравлические приводы 30 а-с могут быть соединены в различных компоновках и что машина 10 содержит любое количество гидравлических приводов.
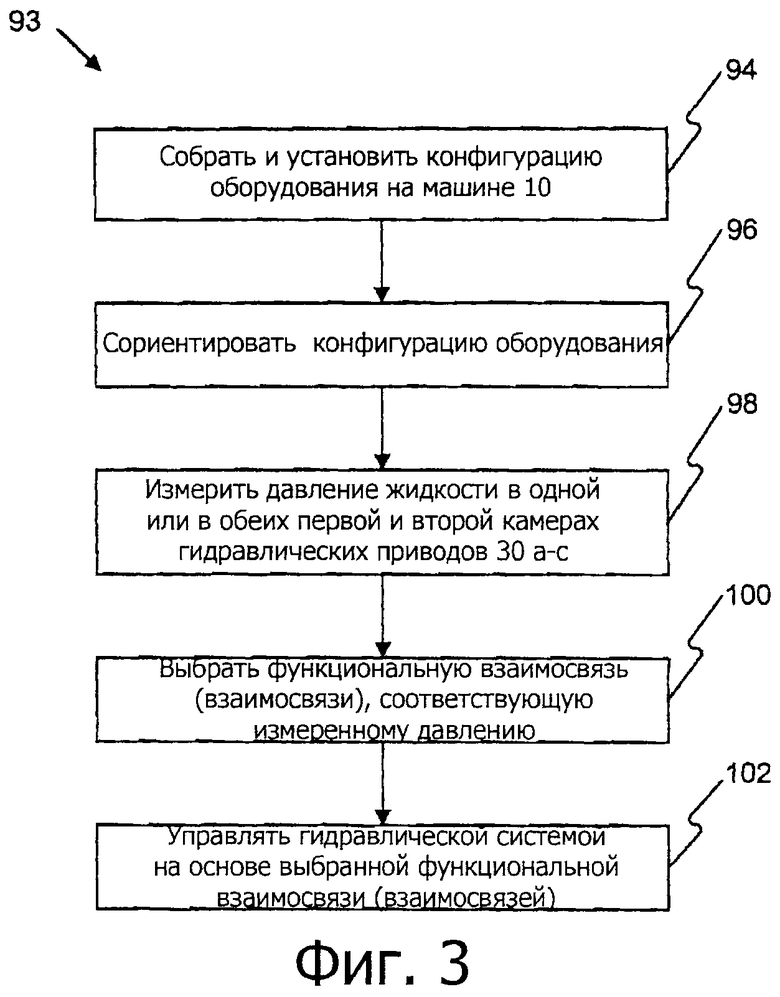
Как показано на фиг.2, машина 10 содержит гидравлическую систему 24, имеющую множество компонентов, которые взаимодействуют для перемещения системы 12 соединения и инструмента 14. В частности, гидравлическая система 24 содержит резервуар 26, содержащий запас жидкости, и насос 28, направляющий жидкость под давлением в гидравлический привод 30b. В то время как на фиг.1, с целью простоты, представлены три привода, обозначенные как 30а, 30b и 30с, на гидравлической схеме на фиг.2 представлен только один гидравлический привод 30b. Описание гидравлической системы 24 и, в частности, гидравлического привода 30b в равной степени применимо к гидравлическим приводам 30а, 30b. Гидравлические приводы 30а и 30с могут быть включены в гидравлическую систему 24 или гидравлическую систему, аналогичную гидравлической системе 24.
Гидравлический привод 30b может содержать трубу 52 и узел 54 поршня, расположенный внутри трубы 52. Одна труба 52 и узел 54 поршня могут быть шарнирно соединены между стрелой 13 и рычагом 15. Гидравлический привод 30b содержит первую камеру 56 и вторую камеру 58, разделенные поршнем 60, имеющим шток 62 поршня. В первую и вторую камеры 56, 58 может быть избирательно подана жидкость под давлением от насоса 28, и жидкость может быть избирательно выпущена, что обеспечивает возможность смещения узла 54 поршня внутри трубы 52, изменяя таким образом эффективную длину гидравлического привода 30b. Раздвижение и сжатие гидравлического привода 30b может представлять собой функцию, которая помогает перемещать стрелу 13, рычаг 15 и инструмент 14. Гидравлическая система 24 может включать датчики 40, 42 давления на стороне днища поршня и на стороне штока, которые могут сообщаться по текучей среде с первой и второй камерами 56, 58, соответственно, и могут быть выполнены с возможностью генерирования сигнала, обозначающего давление жидкости внутри первой и второй камер 56, 58. Датчики 40, 42 давления на стороне днища поршня и на стороне штока могут содержать датчик давления любого типа, известный в данной области техники. Предусматривается, что другие гидравлические приводы, кроме цилиндров с жидкостью, могут, в качестве альтернативы, быть воплощены в гидравлической системе 24, такие как, например, гидравлические двигатели и/или гидравлический привод любого другого типа, известный в данной области техники.
Гидравлическая система 24 содержит компоновку клапанов, имеющую один или несколько клапанов, содержащих клапан 32 подачи на стороне днища поршня, выпускной клапан 34 на стороне днища поршня, клапан 36 подачи на стороне штока, и выпускной клапан 38 на стороне штока. Клапан 32 подачи на стороне днища поршня расположен между насосом 28 и первой камерой 56, и клапан 36 подачи на стороне штока может быть расположен между насосом 28 и второй камерой 58. Выпускной клапан 34 на стороне днища поршня может быть расположен между первой камерой 56 и резервуаром 26, и выпускной клапан 38 на стороне штока может быть расположен между второй камерой 58 и резервуаром 26. Клапаны 32, 36 подачи на стороне днища поршня и на стороне штока могут быть соединены параллельно с общим каналом 68 подачи, продолжающимся от насоса 28. Выпускные клапаны 34, 38 на стороне днища поршня и на стороне штока могут быть соединены параллельно с общим выпускным каналом 70, который ведет к резервуару 26. Клапаны подачи и выпускные клапаны 32, 34, 36 и 38 на стороне днища поршня и на стороне штока могут быть выполнены с возможностью регулирования потока жидкости в и из первой и второй камер 56 и 58, в ответ на скорость команды от контроллера 48. Клапаны подачи и выпускные клапаны 32, 34, 36 и 38 на стороне днища поршня и на стороне штока могут перемещаться в любое положение между полностью открытым и полностью закрытым положениями для изменения скорости потока в и/или из первой и второй камер 56 и 58, влияя, таким образом, на движение гидравлического привода 30b и, таким образом, стрелы 13, рычага 15 и/или инструмента 14. Гидравлическая система 24 может иметь любую компоновку и/или количество клапанов для обеспечения движения гидравлического привода 30b. Также предусматривается, что гидравлическая система 24 может дополнительно иметь любую компоновку и/или количество клапанов для влияния на движение гидравлических приводов 30а и 30с, если гидравлические приводы 30а и 30b включены в гидравлическую систему 24.
Гидравлическая система 24 может содержать контроллер 48, сообщающийся с жидкими компонентами гидравлической системы 24, и устройства 22 интерфейса оператора. Контроллер 48 может воплощать один микропроцессор или множество микропроцессоров, которые управляют гидравлической системой 24. Контроллер 48 может сообщаться с клапанами подачи и выпускными клапанами 32, 34, 36, 38 на стороне днища поршня и на стороне штока через линии 80, 82, 84, 86 передачи, соответственно, с устройством 22 интерфейса оператора через линию 88 передачи и с датчиками 40, 42 давления на стороне днища поршня и на стороне штока через линии 90 и 92 передачи, соответственно. Контроллер 48 может быть непосредственно воплощен в общем микропроцессоре машины, который выполнен с возможностью управления различными функциями машины. Контроллер 48 может содержать запоминающее устройство, вторичное устройство - накопитель, процессор и любые другие компоненты, выполненные с возможностью выполнения приложения. Различные другие схемы могут быть ассоциированы с контроллером 48, такие как схема источника питания, схема обработки сигнала, схема управления соленоида и схемы других типов.
Одна или более функциональных взаимосвязей 71 может быть сохранена в запоминающем устройстве контроллера 48. Функциональная взаимосвязь 71 может функционально сопоставлять входную команду оператора и рабочие параметры, соответствующие первой и/или второй камерам гидравлического привода 30b, а также гидравлических приводов 30а и 30с, которые соответствуют категории конфигурации оборудования. Функциональная взаимосвязь 71 может быть представлена в форме карты, таблицы, графика, уравнения и/или любой другой функциональной взаимосвязи, известной в данной области техники. Как подробно описано ниже, давление в первой и/или второй камерах гидравлических приводов 30а-с может обозначать, какая категория конфигурации оборудования прикреплена к машине 10. В качестве альтернативы, давление в первой и/или второй камерах одного из гидравлических приводов 30а-с может обозначать, какая категория отдельного компонента конфигурации оборудования закреплена на машине 10.
Функциональная взаимосвязь 71 может обеспечивать данные, обозначающие различные рабочие параметры машины 10. В частности, функциональные взаимосвязи 71 могут обеспечивать рабочие параметры для общей категории конфигурации оборудования, закрепленного на машине 10, или для категорий отдельных компонентов конфигурации оборудования, закрепленного на машине 10. Рабочие параметры, обеспечивающие функциональные взаимосвязи 71, могут представлять собой установки положения клапана, которые устанавливают один или более из следующих в отношении гидравлических приводов 30а-с: установки давления для первой и/или второй камер (например, установки обратного давления), диапазоны перемещения (например, пределы привода), команды регенерирования, пределы величины силы, кривая модуляции силы, кривая модуляции скорости и/или установки максимальной скорости (например, быстрая, нормальная, медленная). Например, параметры для относительно более тяжелой конфигурации оборудования могут содержать кривую модуляции скорости с уменьшенной максимальной скоростью для улучшения возможности управления относительно тяжелым инструментом. Кроме того, конфигурация относительно тяжелого оборудования может работать более прогнозируемо в определенном диапазоне перемещения инструмента 14 и/или ниже максимальной скорости инструмента 14. Кроме того, конфигурация относительно тяжелого оборудования может включать установку положения клапана для достижения повышенного обратного давления, которое может уменьшить условия избыточной нагрузки, вызванные тяжелым оборудованием.
Рабочие параметры могут быть определены во время лабораторных и/или полевых испытаний машины 10 и/или путем математического моделирования и могут быть периодически перекалиброваны и обновлены. Также предусматривается, что оператор может экспериментировать с разными операционными параметрами и категориями конфигураций оборудования для определения, какие рабочие параметры соответствуют для категорий конфигураций оборудования.
Во время работы гидравлические приводы 30а-с (фиг.1) приводятся в действие под давлением жидкости в соответствии с входной командой оператора. На фиг.3 иллюстрируется блок-схема последовательности операций, представляющая примерный способ 93 калибровки гидравлической системы, например гидравлической системы 24, выполненной с возможностью влияния на движение одного или более гидравлических приводов, например гидравлических приводов 30а-с. На этапе 94 компоненты конфигурации оборудования могут быть собраны и закреплены на машине 10. На этапе 96 конфигурация оборудования может быть ориентирована. На этапе 98 давление жидкости может быть определено в одной или в обеих из соответствующих камер гидравлических приводов 30а-с. На этапе 100 контроллер 48 может выбирать функциональную взаимосвязь, соответствующую измеренному давлению, по функциональным взаимосвязям 71. На этапе 102 гидравлической системой, управляющей гидравлическими приводами 30а-с, можно управлять на основе выбранной функциональной взаимосвязи или взаимосвязи. Когда новый инструмент и/или систему соединения заменяют, этапы 94, 96, 98, 100 и 102 могут повторяться. Этапы 94, 96, 98, 100 и 102 будут более подробно описаны ниже.
На этапе 94 компоненты конфигурации оборудования могут быть собраны и закреплены на машине 10. Например, компоненты могут быть сконфигурированы, как показано на фиг.1, на которой стрела 13 закреплена на раме 11, рычаг 15 закреплен на стреле 13, и инструмент 14 закреплен на рычаге 15. На этапе 96 конфигурация оборудования может иметь ориентацию, используемую для калибровки системы управления для разных конфигураций оборудования. Примеры ориентации включают вытягивание системы 12 соединения и инструмента 14 вертикально или горизонтально. Оператор может использовать интерфейс 16 оператора для перемещения системы 12 соединения и инструмента 14 до тех пор, пока система 12 соединения и инструмент 14 не будут вытянуты вертикально или горизонтально. Когда разные конфигурации оборудования удерживают в одной и той же ориентации (например, вытянутой вертикально), давление жидкости в первой и второй камерах гидравлических приводов 30а-с может изменяться, в зависимости от конфигурации оборудования, закрепленного на машине 10. Например, при сравнении двух рычагов разных размеров, удерживаемых в одной и той же ориентации, относительно более тяжелый рычаг может прикладывать большую силу к гидравлическим приводам 30а-с. Такая большая сила может соответствовать относительно более высоким давлениям жидкости в одной или в обеих из соответствующих камер гидравлических приводов 30а-с, влияя на их движение. В соответствии с этим, измеренное давление в гидравлических приводах 30а-с, когда рычаг 15 поддерживают в определенной ориентации, может обозначать тип категории рычага 15, например тяжелый, средний, легкий, закрепленный на машине 10. При этом предусматривается, что конфигурации оборудования могут быть, в общем, разделены по категориям, например легкая, средняя, тяжелая, или компоненты конфигураций оборудования могут быть индивидуально разделены по категориям, например легкий, средний, тяжелый инструмент; легкий, средний, тяжелый рычаг; легкая, средняя, тяжелая стрела.
Этап 96 может дополнительно или в качестве альтернативы включать движение оборудования через движение с постоянной скоростью. Когда разные конфигурации оборудования перемещают, используя одинаковое движение, давление жидкости в одной или обеих соответствующих камерах гидравлических приводов 30а-с может изменяться в зависимости от конфигурации оборудования, закрепленной на машине 10. Например, при сравнении двух рычагов разных размеров, поднимаемых в одинаковом движении, относительно более тяжелый рычаг может прикладывать большие усилия к гидравлическим приводам 30а-с. В соответствии с этим, давление, измеренное в первой камере гидравлических приводов 30а-с, когда рычаг 15 перемещают, выполняя определенное движение, может обозначать тип категории, например тяжелый, средний, легкий, рычага 15, закрепленного на машине 10.
На этапе 98 давление жидкости может определяться в одной или обеих соответствующих камерах гидравлических приводов 30а-с. Давление жидкости можно определять одним или обоими датчиками давления на стороне днища поршня и на стороне штока, ассоциированных с гидравлическими приводами 30а-с. Как описано выше, когда оборудование удерживается в определенной ориентации или перемещается в определенном движении, измеренное давление жидкости в первой и/или второй камерах гидравлических приводов 30а-с может обозначать категорию конфигурации оборудования, закрепленного на машине 10.
На этапе 100 контроллер 48 может выбирать функциональную взаимосвязь из функциональных взаимосвязей 71, сохраненных в запоминающем устройстве контроллера 48, который соответствует измеренному давлению. Функциональные взаимосвязи 71 являются множеством функциональных взаимосвязей, каждая из которых соответствует общей категории конфигурации оборудования и конкретному значению давления или диапазона давлений для этой категории. Контроллер 48 может выбирать одну или более функциональных взаимосвязей 71, причем каждая из выбранных функциональных взаимосвязей соответствует определенной категории и значению давления или диапазону давлений. Контроллер 48 может выбирать функциональную взаимосвязь путем сравнения сигнала, обозначающего измеренное давление в первой и/или второй камерах гидравлических приводов 30а-с, со значением давления. Например, контроллер 48 может выбирать первую функциональную взаимосвязь 71, если сигнал будет больше, чем значение давления, или контроллер 48 может выбрать вторую функциональную взаимосвязь 71, если сигнал будет меньше, чем значение давления. В другом примере контроллер 48 может сравнивать сигнал, обозначающий измеренное давление, с первым диапазоном давлений, ассоциированным с первой функциональной взаимосвязью 71, и вторым диапазоном давлений, ассоциированным со второй функциональной взаимосвязью 71. Контроллер 48 может выбирать первую функциональную взаимосвязь, если сигнал находится в пределах первого диапазона давлений, и контроллер 48 может выбирать вторую функциональную взаимосвязь, если сигнал находится в пределах второго диапазона давлений. Контроллер 48 может определять силу, ассоциированную с гидравлическими приводами 30а-с, на основе измеренного давления любым способом, известным в данной области техники. Этап 100 включает выбор функциональной взаимосвязи 71, соответствующей определенной силе, путем сравнения сигнала, обозначающего рассчитанную силу, со значением силы.
В другом варианте выполнения функциональные взаимосвязи 71 включают множество функциональных взаимосвязей, каждая из которых соответствует определенной категории компонентов конфигурации оборудования и конкретного значения давления или диапазона давлений для этой категории компонентов. Контроллер 48 может выбирать одну или более функциональных взаимосвязей 71, причем каждая из выбранных функциональных взаимосвязей соответствует определенной категории компонента конфигурации оборудования и значению давления или диапазона давлений для этой категории. Функциональные взаимосвязи 71 могут быть выбраны таким образом, как описано выше, в отношении выбора функциональной взаимосвязи для конфигурации оборудования. При этом этап 100 может быть выполнен так, чтобы выбрать одну или больше функциональных взаимосвязей, которые соответствуют определенной конфигурации оборудования, закрепленного на машине 10, например определенной конфигурации стрелы, рычага и/или инструмента. Предусматривается, что выбранная функциональная взаимосвязь или функциональные зависимости могут соответствовать категории, например тяжелая, средняя, легкая, конфигурации оборудования или категории определенных компонентов, закрепленных на машине 10.
Предусматривается, что этап 100 может содержать вместо выбора функциональной взаимосвязи модификацию функциональной взаимосвязи для учета измеренного давления. Таким образом, если сигнал, обозначающий измеренное давление, будет больше или меньше, чем определенное значение, рабочие параметры, предусматриваемые одной или более функциональной взаимосвязью 71, могут включать базовый набор рабочих параметров, которые модифицируют как функцию сигнала. Например, базовый набор рабочих параметров может быть индивидуально взвешен для различных категорий конфигураций оборудования.
На этапе 102 гидравлической системой, управляющей гидравлическими приводами 30а-с, управляют на основе выбранной функциональной взаимосвязи или взаимосвязей 71. Другими словами, операционные параметры гидравлической системы могут быть отрегулированы так, чтобы они соответствовали выбранной функциональной взаимосвязи 71. Контроллер 48 может принимать входные команды, обозначающие требуемое движение инструмента из устройства 22 интерфейса оператора. Контроллер 48 может определять через одну или более выбранную или модифицированную функциональную взаимосвязь 71 одну или более команд клапана для выполнения требуемого движения гидравлических приводов 30а-с. В результате, движение гидравлических приводов 30а-с может, по существу, соответствовать ожидаемой или требуемой оператором скорости, независимо от типа конфигурации оборудования, закрепленного на машине 10.
Описанная выше система гидравлического управления может быть применима в любой машине, которая включает гидравлический привод, и может обеспечить улучшенную маневренность в различных конфигурациях оборудования. Работа гидравлической системы 24 и, в частности, калибровка машины 10 поясняется ниже со ссылкой на конкретный пример. Следует учесть, что приведенное ниже пояснение представлено только с целью разъяснения.
В одном примере конфигурация оборудования, показанная на фиг.1, может быть заменена новой конфигурацией оборудования. Стрела 13 может быть заменена относительно более длинной стрелой, и инструмент 14, который показан как ковш на фиг.1, может быть заменен грейфером. В примере стрела 13, рычаг 15 и инструмент 14 могут быть сняты с машины 10, и новая стрела, рычаг 15 и захват могут быть собраны и закреплены на машине 10 (этап 94). Поскольку машина 10, возможно, была ранее откалибрована для работы с конфигурацией оборудования, показанной на фиг.1, машина 10 может не быть откалибрована для работы с новой конфигурацией оборудования. В соответствии с этим, после того как новая конфигурация оборудования будет закреплена на машине 10, оператор может использовать интерфейс 16 оператора для перемещения захвата в определенную ориентацию, в которой он вытянут вертикально, таким образом, размещая конфигурацию оборудования в определенной ориентации (этап 96). Один или оба датчика давления на стороне днища поршня и на стороне штока, ассоциированные с каждым гидравлическим приводом 30а-с, определяют давление в камерах каждого гидравлического привода 30а-с, в то время как захват вытянут вертикально (этап 98). Контроллер 48 может принимать сигнал, обозначающий определенное давление в камерах гидравлических приводов 30а-с.
Контроллер 48 может сравнивать сигнал со значением давления или с диапазонами давления, ассоциированными с функциональными взаимосвязями 71 (этап 100). Предполагая, что захват, рычаг 15 и новая стрела устанавливают конфигурацию среднего инструмента, легкого рычага, тяжелой стрелы, контроллер 48 может выбрать одну функциональную взаимосвязь 71, соответствующую значениям давления или диапазонам давления, ассоциированным со средним инструментом, легким рычагом и тяжелой стрелой. Предусмотрено, что контроллер 48, в качестве альтернативы, может выбрать множество функциональных взаимосвязей 71, причем каждая выбранная функциональная взаимосвязь 71 соответствует, по меньшей мере, одному из значений давления или диапазонов давления, ассоциированных со средним инструментом, легким рычагом и тяжелой стрелой.
Выбранная функциональная взаимосвязь может обеспечивать рабочие параметры, такие как максимальные скорости, для каждого компонента конфигурации оборудования. Контроллер 48 может учитывать выбранную функциональную взаимосвязь и регулировать операционные параметры, относящиеся к захвату, рычагу 15 и относительно длинной стреле, так, чтобы они соответствовали выбранной функциональной взаимосвязи или взаимосвязям 71 (этап 102). Во время последующих операций, например, может быть предотвращено превышение максимальных скоростей захватом, рычагом 15 и относительно длинной стрелой, ассоциированных с каждым из них, в соответствии с выбранной функциональной взаимосвязью или взаимосвязями 71.
Путем калибровки машины 10 на основе измеренных давлений в первой и второй камерах, связанных с гидравлическими приводами 30а-с, различные категории конфигураций оборудования можно использовать с прогнозируемой маневренностью. Поскольку рабочие параметры могут быть установлены для разных категорий конфигураций оборудования без знания идентичности или свойств инструмента 14 и системы 12 соединения, различные категории конфигураций оборудования, включая идентифицированные инструменты и системы соединения, могут быть закреплены на машине 10 и могут работать с прогнозируемой скоростью и управлением.
Для специалиста в данной области техники понятно, что различные модификации и варианты могут быть выполнены для описанной гидравлической системы. Другие варианты выполнения будут очевидны для специалиста в данной области техники с учетом описания и практики применения описанной гидравлической системы. Описание и примеры следует рассматривать только как примеры, при этом истинный объем определяется формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ НЕЗАВИСИМЫМ ДОЗИРУЮЩИМ КЛАПАНОМ, РАБОЧАЯ МАШИНА | 2006 |
|
RU2426016C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2020 |
|
RU2738484C1 |
| КАНАВОКОПАТЕЛЬ С АВТОМАТИЧЕСКИМ ВРЕЗАНИЕМ И РЕГУЛИРОВКОЙ ГЛУБИНЫ СТРЕЛЫ | 2008 |
|
RU2515140C2 |
| Плуг | 2020 |
|
RU2742830C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ГУСЕНИЧНОГО КАНАВОКОПАТЕЛЯ | 2008 |
|
RU2572850C2 |
| ИСПЫТАНИЯ СИСТЕМ АВТОМАТИКИ ПОДСТАНЦИЙ НА СИСТЕМНОМ УРОВНЕ | 2007 |
|
RU2402784C2 |
| СИСТЕМА РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2554449C2 |
| УСТРОЙСТВА ДЛЯ ПОЗИЦИОНИРОВАНИЯ В СТВОЛЕ СКВАЖИНЫ (ВАРИАНТЫ) И СПОСОБЫ ПОЗИЦИОНИРОВАНИЯ СКВАЖИННОГО ИНСТРУМЕНТА В СТВОЛЕ СКВАЖИНЫ И ИЗМЕРЕНИЯ СТВОЛА СКВАЖИНЫ | 2005 |
|
RU2378508C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБСЛУЖИВАНИЯ РАБОЧЕЙ МАШИНЫ И СПОСОБ ОБСЛУЖИВАНИЯ | 2013 |
|
RU2659116C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО УСТРОЙСТВА | 2003 |
|
RU2309116C2 |
Изобретение относится к способу эксплуатации гидравлической системы рабочей машины. Техническим результатом является обеспечение возможности модификации взаимосвязи скорости гидравлического привода на основе разной категории конфигураций рабочего оборудования. Способ эксплуатации гидравлической системы содержит следующие этапы: удерживают конфигурацию оборудования в определенной ориентации; измеряют первое давление в камере (56, 58) гидравлического привода, соединенного с оборудованием, когда оборудование находится в заданном положении; сравнивают первый сигнал с первым значением давления; выбирают первую функциональную взаимосвязь (71) среди множества сохраненных функциональных взаимосвязей, если первый сигнал больше, чем первое значение давления; выбирают вторую функциональную взаимосвязь среди множества сохраненных функциональных взаимосвязей, если первый сигнал меньше, чем первое значение давления; и управляют гидравлическим приводом на основе выбранной функциональной взаимосвязи. Причем каждую из множества сохраненных функциональных взаимосвязей ассоциируют с разной категорией конфигураций оборудования. 2 н. и 7 з.п. ф-лы, 3 ил.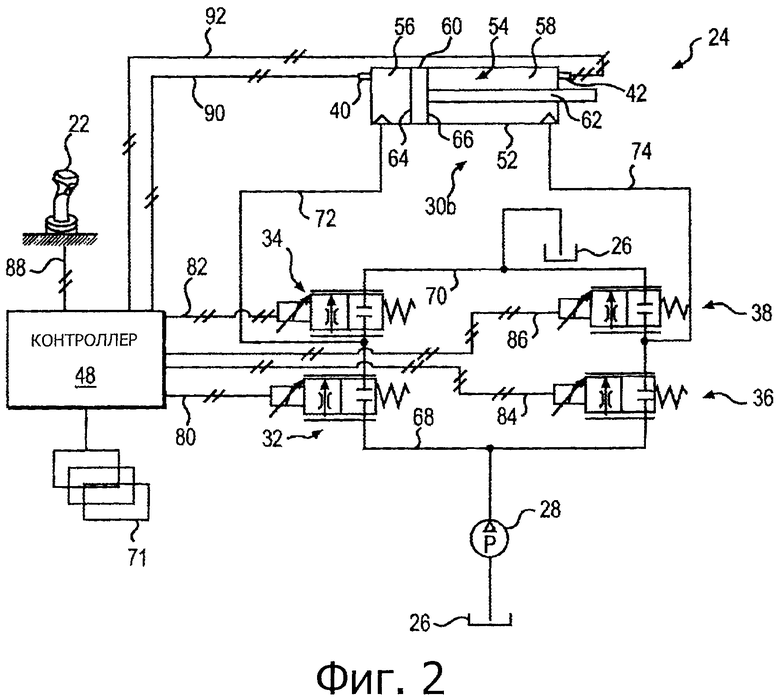
1. Способ эксплуатации гидравлической системы (24), при котором:
удерживают конфигурацию оборудования в заданном положении;
измеряют первое давление, по меньшей мере, в одной камере (56, 58), по меньшей мере, одного гидравлического привода, соединенного с оборудованием, при этом оборудование находится в заданном положении;
сравнивают первый сигнал, обозначающий первое измеренное давление, с первым значением давления;
выбирают первую функциональную взаимосвязь (71) среди множества сохраненных функциональных взаимосвязей, если первый сигнал больше, чем первое значение давления;
выбирают вторую функциональную взаимосвязь среди множества сохраненных функциональных взаимосвязей, если первый сигнал меньше, чем первое значение давления; и
управляют гидравлическим приводом на основе выбранной функциональной взаимосвязи, причем каждую из множества сохраненных функциональных взаимосвязей ассоциируют с разной категорией конфигураций оборудования.
2. Способ по п.1, в котором сравнение первого сигнала с первым значением давления включает сравнение первого сигнала с первым диапазоном значений давления, ассоциированных с первой функциональной взаимосвязью, и вторым диапазоном значений давления, ассоциированным со второй функциональной взаимосвязью.
3. Способ по п.2, в котором выбирают первую функциональную взаимосвязь, если первый сигнал находится в пределах первого диапазона значений давления, и выбирают вторую функциональную взаимосвязь, если первый сигнал находится в пределах второго диапазона значений давления.
4. Способ по п.1, в котором конфигурация оборудования содержит множество компонентов и каждую из множества сохраненных функциональных взаимосвязей ассоциируют с разной категорией компонентов.
5. Способ по п.1, в котором каждая из множества сохраненных функциональных взаимосвязей функционально сопоставляет входные команды оператора и рабочие параметры, соответствующие гидравлическому приводу.
6. Способ по п.5, в котором посредством рабочих параметров определяют установку давления для камеры гидравлического привода.
7. Способ по п.5, в котором рабочие параметры устанавливают максимальную скорость для компонента оборудования.
8. Способ по п.1, при котором:
измеряют второе давление, по меньшей мере, в одной камере второго гидравлического привода, соединенного с оборудованием; и
сравнивают второй сигнал, обозначающий второе давление, со вторым значением давления.
9. Машина, имеющая гидравлическую систему (24), содержащая:
конфигурацию оборудования, включающую инструмент (24) и систему (12) соединения;
гидравлический привод (30a-c), предназначенный для приведения в движение компонента оборудования, причем гидравлический привод содержит первую камеру (56) и вторую камеру (58);
датчик (40, 42) для измерения давления, по меньшей мере, в одной камере, в то время как конфигурацией оборудования управляют; и
контроллер (48), предназначенный для осуществления способа по любому из пп.1-8.
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| МЕХАНИЗМ ДЛЯ НАСТРОЙКИ, ПЕРЕКЛЮЧЕНИЯВИДОВ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ РАБОЧИХОРГАНОВ ОРУДИЙ И УВЕЛИЧЕНИЯСЦЕПНОГО ВЕСА ТРАКТОРА!.2 | 1972 |
|
SU426615A1 |
| US 20060156713 A1, 20.07.2006 | |||
| EP 1403438 A1, 31.03.2004 | |||
| US 20050199120 A1, 15.09.2005 | |||

