Предлагаемое изобретение относится к области специальной радиотехники и может быть использовано в радио и гидролокационных системах при обнаружении сигналов на фоне помех и оценки параметров сигналов.
Известно, что реализация оптимального приема при решении задачи обнаружения сигналов на фоне помех во многом определяется уровнем знаний о принимаемом сигнале.
Если спектральная характеристика сигнала неизвестна, то используют энергетические методы (эккартовская фильтрация) и устройства приема [1-4], представляющие собой последовательное выполнение операций фильтрации, квадратичного детектирования и интегрирования. Недостаток таких методов заключается в появлении «эффекта подавления малого сигнала», вследствие не использования приемником фазовой информации, содержащейся в принимаемом сигнале.
Для сигналов с неизвестной задержкой, но известной фазовой структурой приходящего сигнала и энергетической спектральной характеристикой шума оптимальным является согласованный фильтр [1-4]. Основным недостатком согласованного фильтра является ограниченность его применения только для класса сигналов с известным и постоянным доплеровским параметром. В случае присутствия неизвестной кинематики носителя сигналов необходима многоканальная схема, осуществляющая фильтрацию по каждому из возможных значений доплеровского параметра. В предлагаемом техническом решении для обнаружения сигналов производится согласованная фильтрация по переменному доплеровскому параметру.
В [5, с.46] показано, что для многих практических задач, связанных с обнаружением локационных сигналов и измерением параметров движения объектов, в выражении для ошибки оценки постоянного доплеровского эффекта можно пренебречь членом, зависящим от переменного доплеровского эффекта. В известных технических решениях, предназначенных для разрешения цели по скорости в одном элементе дальности, переменный доплеровский эффект, как правило, не учитывается [6-11].
Однако для быстроманеврирующих целей с большим числом Маха 2ν/с, где ν - относительная скорость сближения цели, с - скорость распространения сигнала, пренебрежение переменным доплеровским эффектом приведет к большим ошибкам рассогласования между принимаемым сигналом и эталоном. Это рассогласование значительно в условиях гидролокационного приема и длинных зондирующих посылок [12].
Учет переменного доплеровского параметра необходим главным образом в условиях изменения радиальной скорости цели [13].
Рассмотрим примеры, демонстрирующие необходимость учета переменного доплеровского эффекта в задачах гидролокации.
Пусть приемник и источник движутся с постоянными скоростями соответственно  и
и  . Тогда
. Тогда  - текущая координата приемника, а
- текущая координата приемника, а  - текущая координата источника, где
- текущая координата источника, где  - расстояние между источником и приемником на момент времени t=0.
- расстояние между источником и приемником на момент времени t=0.
Расстояние между источником и приемником равно

Разлагая выражение (1) в ряд Тейлора и ограничиваясь тремя членами разложения, запишем

Сигнал на приемнике имеет вид
где

 ,
,

Без потери общности положим ψ=0. В этом случае


Из анализа (4) можно сделать вывод, что параметр β достигает своего максимального значения при условии ϕ=-ψ=π/2. В этом случае  . При значениях, например, ν+u=1 [м/с], r0=100 [м], с=1500 [м/с] параметр β равен 0.0000033. При этом зависимость потери когерентных свойств сигналов от параметра β представлена на фиг.1.
. При значениях, например, ν+u=1 [м/с], r0=100 [м], с=1500 [м/с] параметр β равен 0.0000033. При этом зависимость потери когерентных свойств сигналов от параметра β представлена на фиг.1.
Из анализа фиг.1 следует необходимость учета переменного доплеровского эффекта.
Наиболее близким к предлагаемому изобретению является способ согласованной фильтрации принятого сигнала [14].
Рассмотренный способ позволяет выделить сигнал на фоне помехи. Суть способа состоит в вычислении прямого преобразования Фурье входного процесса, перемножении комплексного спектра Фурье входного процесса с сопряженным спектром Фурье копии излученного сигнала, вычислении обратного преобразования Фурье от результата перемножения, вычислении квадрата модуля и сравнении с порогом. Обработка производится в реальном масштабе времени, т.е. отсчеты входной реализации обновляются в соответствии с теоремой Котельникова. Превышение порогового значения происходит в момент компенсации задержки τ=0. При этом принимается решение об обнаружении цели, а сам момент будет соответствовать дистанции до цели. Рассмотренный способ является оптимальным с точки зрения отношения сигнал/помеха для детерминированного сигнала и при постоянном доплеровском эффекте. Однако он не позволяет избежать потерь в отношении сигнал/помеха в условиях переменного доплеровского эффекта. Целью предлагаемого изобретения является повышение помехоустойчивости за счет уменьшения потерь в отношении сигнал/помеха, связанных с переменным доплеровским эффектом. Поставленная цель достигается тем, что в способ корреляционной обработки эхо-сигналов от движущейся цели, основанный на излучении зондирующего сигнала и согласованной фильтрации принятого процесса, дополнительно вводится операция инверсной передискретизации сигнала с переменным шагом дискретизации.
Суть способа состоит в следующем. Для устранения влияния переменного доплеровского эффекта на помехоустойчивость согласованного фильтра предлагается ввести процедуру, которая обладает групповой симметрией:
Для реализации процедуры (5) необходимо производить обработку сигнала в двух областях: временной t и инверсно-временной -1/t. Обработка сигнала во временной области заключается в секционировании сигнала с привязкой к определенному моменту времени, который выступает в качестве начального отсчета, и компенсируют задержку τ.
При условии определенности по параметру задержки процедура (5) записывается в виде, характеризующем преобразование сигнала относительно группы инверсных преобразований времени:
Обратный элемент группы инверсных преобразований времени определяется правилом:
Для перехода в инверсную область времени выполняется преобразование, соответствующее обращению и инверсии носителя сигнала. То есть t→-1/t, где t - носитель сигнала во временной области, -1\t - носитель сигнала в инверсной области. Это необходимо для трансформации переменного доплеровского параметра β в параметр, аналогичный линейному сдвигу τ на группе линейных преобразований времени.
Для выполнения операции перехода от t к -1/t в дискретном виде реализована операция инверсной передискретизации сигнала с учетом времени его окончания. Передискретизация проводиться в соответствии с выражением:
где  - индексы отсчетов инверсного сигнала;
- индексы отсчетов инверсного сигнала;
 - количество отсчетов инверсного сигнала;
- количество отсчетов инверсного сигнала;
 - интервал между инверсными отсчетами;
- интервал между инверсными отсчетами;
n0 - индекс начального отчета интерполяции;
nN-1 - индекс последнего отсчета интерполяции.
Инверсная передискретизация заключается в нахождении значений сигнала в промежуточных точках (узлах), определяемых выражением (6), с помощью процедуры интерполяции [26]:
где hn(x) - проинтерполированные значения;
yk - значение узловой точки с индексом k;
xk - номер узловой точки с индексом k;
i, k, j - индексы номеров узловых точек и их значений;
р - количество узловых точек для интерполяции.
После перехода в инверсно-временную область переменный доплеровский параметр трансформируется в инверсный сдвиг, являющийся аналогом линейного сдвига в области времени. Таким образом, появляется возможность определения постоянного и переменного доплеровских параметров с помощью операции согласованной фильтрации:

где S(f) - преобразование Фурье входного сигнала;
 - сопряженное преобразование Фурье эталонного сигнала;
- сопряженное преобразование Фурье эталонного сигнала;
α, α1 - действительный доплеровский параметр и имеющийся в банке данных;
β, β1 - переменный доплеровский параметр сигнала и эталона.
Применение операции (7) позволяет устранить необходимость перебора значений по переменному доплеровскому параметру.
Для определения постоянного доплеровского параметра α формируется банк данных. При равенстве действительных и имеющихся в банке данных параметров α выражение (7) достигает максимального значения, соответствующего максимальному отношению сигнал/шум.
Выполнение согласованной фильтрации осуществляется следующим образом:
1) вычисляется спектр Фурье передискретизированного сигнала S(f);
2) вычисляется спектр Фурье эталонного сигнала со значением параметра α, взятым из банка данных  . Производится комплексное сопряжение полученного спектра:
. Производится комплексное сопряжение полученного спектра:  ;
;
3) перемножаются спектр Фурье передискретизированного сигнала S(f) и сопряженный спектр эталонного сигнала  ;
;
4) вычисляется обратное преобразование Фурье от результата последнего перемножения: 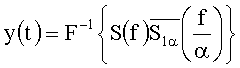 .
.
После согласованной фильтрации (7) осуществляется квадратичное детектирование огибающей отклика согласованного фильтра (вычисление квадрата модуля  отклика СФ). Затем
отклика СФ). Затем  сравнивается с пороговым значением, выбираемым в зависимости от требуемой вероятности ложной тревоги. Превышение порогового значения происходит в момент компенсации задержки τ=0, постоянного доплеровского параметра α=α1 и переменного доплеровского параметра β=β1. При этом принимается решение об обнаружении полезного сигнала. А информация о значениях задержки, постоянного и переменного доплеровских параметров используется для определения соответственно дистанции до объекта, скорости и ускорения.
сравнивается с пороговым значением, выбираемым в зависимости от требуемой вероятности ложной тревоги. Превышение порогового значения происходит в момент компенсации задержки τ=0, постоянного доплеровского параметра α=α1 и переменного доплеровского параметра β=β1. При этом принимается решение об обнаружении полезного сигнала. А информация о значениях задержки, постоянного и переменного доплеровских параметров используется для определения соответственно дистанции до объекта, скорости и ускорения.
Описанные выше шаги обработки сигналов повторяются для каждого параметра α, хранящегося в банке данных. В результате формируется трехмерная широкополосная функция неопределенности, вид которой представлен на фиг.2.
Применение новой по сравнению с прототипом операции передискретизации для каждого канала обработки позволило получить положительный эффект, заключающийся в повышение помехоустойчивости обнаружения сигналов при наличии переменного доплеровского эффекта.
Выигрыш в помехоустойчивости предлагаемого способа обнаружения сигналов, при наличии переменного доплеровского эффекта, по сравнению с классической согласованной фильтрацией обусловлен увеличением вероятности правильного обнаружения сигналов за счет снижения ошибки при сравнении с эталонными сигналами и составляет 7 дБ.
Устройство, реализующее предлагаемый способ обнаружения сигналов при наличии переменного доплеровского эффекта, приведено на фиг.3, где:
блок 1 - аналого-цифровой преобразователь (АЦП),
блок 2 - рециркулятор,
блок 3 - блок инверсной передискретизации,
блок 4 - вычислитель БПФ,
блок 5 - комплексный перемножитель,
блок 6 - ПЗУ,
блок 7 - вычислитель обратного БПФ,
блок 8 - вычислитель квадрата модуля,
блок 9 - пороговое устройство,
блок 10 - управляющее устройство.
Таким образом, устройство, реализующее предлагаемый способ, содержит: аналого-цифровой преобразователь (блок 1), выход которого соединен с входом рециркулятора (блок 2), выход которого соединен с входом блока инверсной передискретизации (блок 3), выход которого является входом вычислителя быстрого преобразования Фурье (блок 4), выход которого соединен с первым входом комплексного перемножителя (блок 5), выход которого соединен с входом вычислителя обратного быстрого преобразования Фурье (блок 7), выход которого соединен с входом вычислителя квадрата модуля (блок 8), выход которого соединен с входом порогового устройства (блок 9), выход которого является выходом устройства; постоянное запоминающее устройство (блок 6), выход которого соединен со вторым входом комплексного перемножителя (блок 5), управляющее устройство (блок 10), выходы которого соединены с управляющими входами аналого-цифрового преобразователя, рециркулятора, вычислителя быстрого преобразования Фурье, комплексного перемножителя, вычислителя обратного быстрого преобразования Фурье и постоянного запоминающего устройства.
Блок аналого-цифровой преобразователя 1 предназначен для представления исходного сигнала в цифровой форме.
Блок рециркулятора 2 предназначен для хранения выходных отсчетов АЦП (блок1).
Блок инверсной передискретизации 3 осуществляет преобразование в соответствии с выражением (6).
Блок быстрого преобразования Фурье (БПФ) 4 предназначен для нахождения спектра сигнала и широко распространен в цифровой обработке сигналов [19].
Блок комплексного перемножения 5 предназначен для перемножения отсчетов сопряженного комплексного спектра эталонного сигнала  и спектра входной реализации.
и спектра входной реализации.
Блок постоянного запоминающего устройства (ПЗУ) 6. В нем хранятся сопряженные преобразования Фурье эталонных сигналов.
Блок обратного быстрого преобразования Фурье (БПФ) 7 предназначен для нахождения отсчетов сигнала во временной области и широко распространен в цифровой обработке сигналов [20].
Блок вычислителя квадрата модуля 8 предназначен для возведения в степень 2 значений отсчетов с выхода блока 7.
Блок порогового устройства 9 предназначен для сравнения с пороговым значением отсчетов с выхода блока 8.
Блок управляющего устройства 10 предназначен для синхронизации работы всех блоков.
Принцип действия устройства заключается в следующем. Реализация входного процесса x(t) поступает на вход АЦП (блок 1) с частотой дискретизации, удовлетворяющей требованиям теоремы Котельникова: 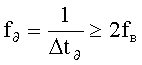 .
.
С выхода АЦП (блок 1) дискретные отсчеты поступают на вход рециркулятора (блок 2), где формируется и с каждым новым отсчетом обновляется текущая дискретная выборка s(n) длиной N-отсчетов. Длина выборки N определяется длительностью излучаемого сигнала и интервалом дискретизации:  . Сформированная текущая дискретная выборка входного процесса s(n) поступает на вход блока инверсной передискретизации (блок 3). С выхода передискретизатора преобразованный сигнал поступает на вход вычислителя БПФ (блок 4), с выхода которого комплексный спектр S(n) преобразованной входной реализации поступает на вход комплексного перемножителя (блок 5). На другой вход комплексного перемножителя поступает вычисленный заранее сопряженный комплексный спектр эталонного сигнала
. Сформированная текущая дискретная выборка входного процесса s(n) поступает на вход блока инверсной передискретизации (блок 3). С выхода передискретизатора преобразованный сигнал поступает на вход вычислителя БПФ (блок 4), с выхода которого комплексный спектр S(n) преобразованной входной реализации поступает на вход комплексного перемножителя (блок 5). На другой вход комплексного перемножителя поступает вычисленный заранее сопряженный комплексный спектр эталонного сигнала  , хранящийся в ПЗУ (блок 6). Результат перемножения поступает на вход вычислителя обратного БПФ (блок 7). С выхода вычислителя обратного БПФ (блок 7) отклик согласованного фильтра y(n) поступает на вход вычислителя квадрата модуля (блок 8), с выхода которого выделенная огибающая
, хранящийся в ПЗУ (блок 6). Результат перемножения поступает на вход вычислителя обратного БПФ (блок 7). С выхода вычислителя обратного БПФ (блок 7) отклик согласованного фильтра y(n) поступает на вход вычислителя квадрата модуля (блок 8), с выхода которого выделенная огибающая  поступает на вход порогового устройства (блок 9), выход которого является выходом устройства.
поступает на вход порогового устройства (блок 9), выход которого является выходом устройства.
Устройство управления (блок 10) осуществляет синхронизацию работы: аналого-цифрового преобразователя (блок 1), рециркулятора (блок 2), блока инверсной передискретизации (блок 3), вычислителя быстрого преобразования Фурье (блок 4), комплексного перемножителя (блок 5), вычислителя обратного быстрого преобразования Фурье (блок 7) и постоянного запоминающего устройства (блок 6).
Литература
1. Лезин Ю.С. Введение в теорию и технику радиотехнических систем. - М.: Радио и связь, 1986. - 280 с.
2. Хелстром К. Статистическая теория обнаружения сигналов. - М.: Иностранная литература, 1963. - 430 с.
3. Ван-Трис Г. Теория обнаружения, оценок и модуляции. T.1. - М.: Сов. радио, 1972. - 744 с.
4. Ван-Трис Г. Теория обнаружения, оценок и модуляции. Т.3, - М.: Сов. радио, 1977. - 661 с.
5. Келли. Радиолокационное измерение дальности, скорости и ускорения. Зарубежная радиоэлектроника (ЗР). №2, 1962. - С.35.
6. А.С. № 537315 (СССР) от 301176. Способ определения скорости движения судна относительно дна.
7. Патент №4282589 США, 1981. Корреляционный способ измерения дальности.
8. Патент №3938147 США, 1976. ЧМ доплеровская система измерения дальности.
9. Заявка №1482816 Великобритания. Способ и устройство для измерения доплеровского частотного сдвига.
10. Заявка №2605933 ФРГ. Способ измерения расстояния и скорости, основанный на использовании импульсной доплеровской РЛС.
11. Заявка №56-41953 Япония 1981. Способ и прибор для измерения расстояния с помощью РЛС непрерывного излучения с ЧМ.
12. Крамер. Допустимая расстройка скорости и ускорения в высокочувствительных широкополосных корреляционных гидролокаторах с линейной ЧМ. ТИИЭР. Т.55, №5, 1967. - С.3.
13. Рихачек. Разрешение подвижных целей в радиолокации. ЗР. №1, 1968. - С.3.
14. Бурдик В.С. Анализ гидроакустических систем. - Л.: Судостроение, 1988. - С.339-341.
15. Келли, Вишнер. Теория согласованной фильтрации целей, движущихся ускоренно с высокими скоростями. ЗР. №10, 1965. - С.38.
16. Киблер. КЭВОРТ - устройство оптимальной обработки пачечного радиолокационного сигнала с учетом ускорения целей. ЗР, 1968. - С.27-33.
17. Шмарев Е.И. др. Оптическое вычисление функции неопределенности сигналов (обзор). ЗР. №10, 1981. - С.41-43.
18. Красногоров С. Совместная оценка амплитуды, фазы, расстояния и его производных радиолокационными методами. Радиотехника и электроника. №9, 1, 1964. - C.79.
19. Применение цифровой обработки сигналов. / Под ред. Оппенгейма Э., - М.: Мир, 1980, - с.284, 417-418.
20. Мирский Г. Электронные измерения. - М.: Радио и связь, 1986. - С.126-140. А.С. № 832490 (СССР) от 280581, Анализатор спектра.
21. Макс Ж. Методы и техника обработки сигналов при физических измерениях. Т.2. - М.: Мир, 1983. - С.204.
22. Бронштейн И., Семендяев К. Справочник по математике. - М.: Наука, 1980. - C.369.
23. Найт У. Цифровая обработка сигналов в гидролокационных системах. ТИИЭР. Т.69. №11, 1981. - C.127.
24. Белоцерковский Г. Основы радиолокации и радиолокационные устройства. - М.: Сов. Радио, 1975. - С.25-26.
25. Калиткин Н.Н. Численные методы. - М.: Наука, 1986. - С.38.


Использование: способ обнаружения сигналов при наличии переменного доплеровского эффекта относится к области специальной радиотехники и предназначен для использования в системах обнаружения и слежения за движущимися объектами. Сущность: в способе обнаружения сигналов при наличии переменного доплеровского эффекта осуществляется операция согласованной фильтрации принятой реализации, заключающейся в вычислении прямого преобразования Фурье входного процесса, перемножении комплексного спектра Фурье входного процесса с сопряженным спектром Фурье копии излученного сигнала, вычислении обратного преобразования Фурье от результата перемножения, вычислении квадрата модуля и сравнения с порогом, при этом перед операцией вычисления прямого преобразования Фурье предварительно проводят операцию инверсной передискретизации принятой реализации. Устройство обнаружения сигналов содержит АЦП, рециркулятор, вычислитель быстрого преобразования Фурье, комплексный перемножитель, вычислитель обратного быстрого преобразования Фурье, вычислитель квадрата модуля, пороговое устройство, постоянное запоминающее устройство. Устройство дополнительно содержит блок инверсной передискретизации и устройство управления. Техническим результатом является повышение помехоустойчивости обнаружения сигналов при наличии переменного доплеровского эффекта. 2 н.п. ф-лы, 3 ил.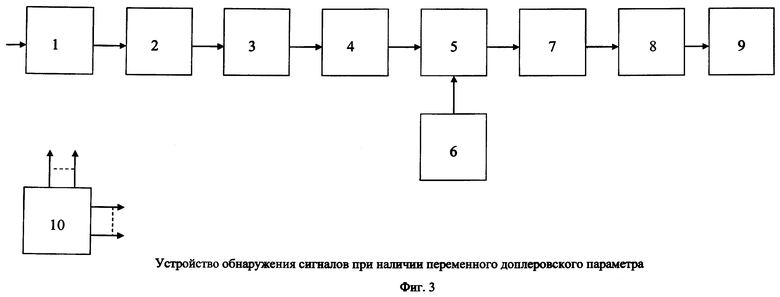
1. Способ обнаружения сигналов при наличии переменного доплеровского эффекта, основанный на операции согласованной фильтрации принятой реализации, заключающейся в вычислении прямого преобразования Фурье входного процесса, перемножении комплексного спектра Фурье входного процесса с сопряженным спектром Фурье копии излученного сигнала, вычислении обратного преобразования Фурье от результата перемножения, вычислении квадрата модуля и сравнения с порогом, отличающийся тем, что перед операцией вычисления прямого преобразования Фурье предварительно проводят операцию инверсной передискретизации принятой реализации.
2. Устройство обнаружения сигналов при наличии переменного доплеровского эффекта, содержащее аналого-цифровой преобразователь, на вход которого подается входной сигнал, а выход которого соединен с входом рециркулятора, выход которого соединен с входом вычислителя быстрого преобразования Фурье, выход которого соединен с первым входом комплексного перемножителя, выход которого соединен с входом вычислителя обратного быстрого преобразования Фурье, выход которого соединен с входом вычислителя квадрата модуля, выход которого соединен с входом порогового устройства, выход которого является выходом устройства; постоянное запоминающее устройство, выход которого соединен со вторым входом комплексного перемножителя, отличающееся тем, что оно содержит блок инверсной передискретизации, вход которого соединен с выходом рециркулятора, а выход является входом вычислителя быстрого преобразования Фурье, и устройство управления, выходы которого соединены с входами аналого-цифрового преобразователя, рециркулятора, блока инверсной передискретизации, вычислителя быстрого преобразования Фурье, комплексного перемножителя, вычислителя обратного быстрого преобразования Фурье, постоянного запоминающего устройства.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2042152C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| Способ изготовления изделий из минеральной ваты | 1949 |
|
SU77980A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| WO 9114953 A1, 03.10.1991 | |||
| US 7123548 B1, 17.10.2006. | |||

