Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС), работающих с высокоманевренными целями, движущимися с переменной радиальной скоростью. Достигаемым техническим результатом является уменьшение количества периодов излучения и приема пачек радиоимпульсов в ИД РЛС для компенсации частотной модуляции (ЧМ) доплеровских сигналов высокоманевренных целей.
Известна ИД РЛС, приемный тракт которой выполнен по традиционной схеме супергетеродинных приемников, выходные сигналы которого в цифровом виде поступают в процессор РЛС, осуществляющий обнаружение целей и измерение их координат [1, с. 235-248]. В каждом канале дальности с помощью цифрового фильтра выполняется частотная селекция области, свободной от мешающих отражений, и доплеровская фильтрация принимаемых сигналов с помощью эффективного алгоритма быстрого преобразования Фурье (БПФ). После операции БПФ осуществляется формирование модуля выходного сигнала фильтров доплеровской селекции, который поступает на пороговую схему для сравнения с порогом обнаружения. Далее производится оценка доплеровского смещения частоты и дальности до цели.
Известно устройство, реализующее метод цифровой обработки сигналов (ЦОС) в ИД РЛС, структурная схема которого представлена в [2].
В указанном методе с помощью цифрового формирования квадратурных составляющих осуществляют вычисление комплексной огибающей сигналов, поступающих с выхода усилителя промежуточной частоты, выполняют ее согласованную фильтрацию, формируют дальностно-временной портрет (ДВП) и дальностно-частотный портрет (ДЧП) целей, выполняют вычисление модуля спектров сигналов и его пороговую обработку.
Под ДВП радиолокационной цели понимается двумерная матрица, сформированная из дискретных отсчетов эхосигналов, соответствующих разным каналам дальности, путем многократного зондирования пространства. Сигнал каждого столбца ДВП представляет собой отсчеты эхосигнала, полученные в одном периоде зондирования и соответствующие последовательно во времени всем каналам дальности. Сигнал каждой строки в ДВП (доплеровский сигнал) представляет собой отсчеты эхосигнала, соответствующие одному каналу дальности во всех периодах излучения зондирующего сигнала.
Под ДЧП радиолокационной цели понимается двумерная матрица, сформированная из дискретных отсчетов, представляющих собой одномерное дискретное преобразование Фурье (ДПФ) отсчетов доплеровских сигналов каждой строки ДВП, полученных с помощью алгоритма БПФ.
Недостаток указанных аналогов заключается в том, что при обработке эхосигналов от движущихся с переменными радиальными скоростями высокоманевренных целей происходит снижение потенциально достижимого отношения сигнал-шум (ОСШ) и разрешения по скорости целей.
Причина возникающих недостатков заключается в следующем.
За время накопления, необходимое для многократного зондирования высокоманевренной цели и приема эхосигналов, в доплеровском сигнале, отсчеты которого в разных периодах повторения соответствуют одному и тому же элементу дальности, в ДВП появляется паразитная ЧМ, обусловленная действием эффекта Доплера с переменным коэффициентом преобразования временного масштаба [3]. Это приводит к расширению спектра доплеровского сигнала в ДЧП и не позволяет в ДЧП когерентно накопить доплеровский сигнал на одной частоте. Появляется сигнал на выходе соседних доплеровских фильтров (фильтров БПФ), амплитуда которых меньше потенциально достижимого значения на выходе одного фильтра, соответствующего постоянной скорости цели. В результате снижается ОСШ на выходе ДЧП, а изображение цели на ДЧП оказывается «размазанным» по каналам скорости, что существенно снижает возможности разрешения целей по скорости.
Наиболее близким по технической сущности аналогом заявляемого изобретения является устройство цифровой обработки сигналов в ИД РЛС с компенсацией ЧМ доплеровских сигналов, работающей в режиме разрешения целей (после обнаружения и оценки параметров цели), описанное в патенте RU 2657462 С1 [4]. Выберем его в качестве прототипа.
Отличием прототипа от других аналогов является компенсация ЧМ доплеровских сигналов, позволяющая повысить повышение ОСШ и разрешение по скорости высокоманевренных целей, движущихся с переменной радиальной скоростью.
Указанный результат достигается тем, что в известном устройстве-прототипе, входной сигнал подается на вход последовательно соединенных цифрового формирователя квадратурных составляющих (ЦФКС), согласованного фильтра (СФ), формирователя ДВП, поэлементного умножителя матриц, формирователя ДЧП и вычислителя модуля, а второй выход формирователя ДВП подключен к последовательно соединенным формирователю сигнала автофокусировки (АФ), вычислителю амплитудного спектра, вычислителю центра симметрии амплитудного спектра и формирователю матрицы опорного сигнала, выход которого подключен ко второму входу поэлементного умножителя матриц, причем существует второй вход формирователя ДЧП для поступления целеуказания по дальности.
Устройство-прототип за два периода излучения и приема пачки радиоимпульсов компенсирует паразитную ЧМ доплеровских сигналов, что повышает ОСШ и улучшает разрешение по скорости высокоманевренных целей в ИД РЛС, работающих после обнаружения и оценки параметров цели в режимах сопровождения и разрешения целей.
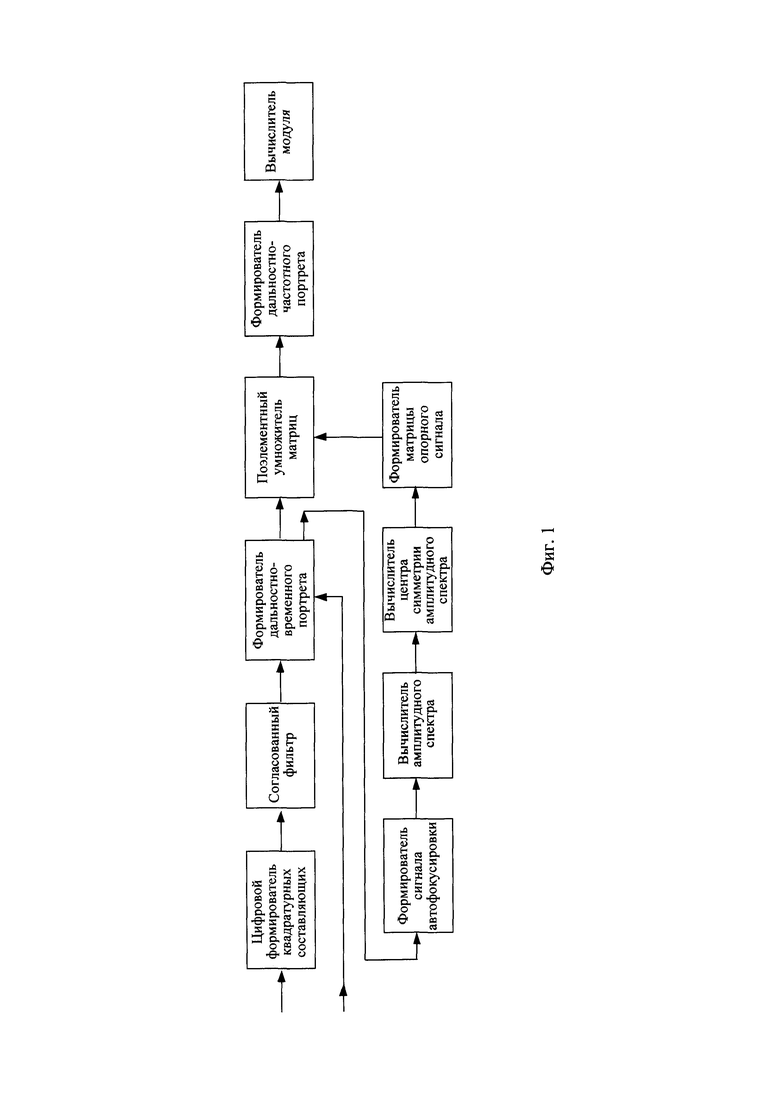
Работа прототипа поясняется структурной схемой, приведенной на фиг. 1. Устройство ЦОС ИД РЛС с компенсацией паразитной ЧМ доплеровских сигналов работает следующим образом.
В ЦФКС входные аналоговые сигналы преобразуются в цифровую форму и формируются их квадратурные составляющие. В СФ выполняется согласованная фильтрация комплексной огибающей эхосигналов. Отсчеты принятых сигналов каждого периода зондирования поступают в формирователь ДВП и записываются в двумерную матрицу ДВП.
Одновременно с началом работы режима разрешения целей (после обнаружения и оценки параметров цели) на второй вход устройства поступает целеуказание по дальности о движущейся высокоманевренной цели. Из формирователя ДВП считываются NE строк, симметрично расположенных относительно целеуказания по дальности, в формирователь сигнала АФ, в котором путем формирования сдвинутых во времени и комплексно-сопряженных доплеровских сигналов формируются сигналы АФ.
Далее сигналы АФ поступают в вычислитель амплитудного спектра, в котором рассчитывается модуль ДПФ. Затем вычисляется усредненный амплитудный спектр из входных NЕ амплитудных спектров сигналов АФ.
Сигнал амплитудного спектра поступает в вычислитель центра симметрии амплитудного спектра, в котором вычисляется автосвертка поступившего сигнала и определяется координата, соответствующая максимуму вычисленной функции.
В формирователе матрицы опорного сигнала вычисляется индекс ЧМ доплеровского сигнала и формируется матрица опорного сигнала для компенсации паразитной ЧМ. На выходе умножителя поэлементного умножителя матриц формируются доплеровские сигналы со скомпенсированной паразитной ЧМ. Далее отсчеты сигналов поступают в формирователь ДЧП и вычислитель модуля, выходные сигналы которого используются для подтверждения обнаружения, уточнения скорости объектов и разрешения высокоманевренных целей по скорости.
Недостатком прототипа является необходимость двухкратного излучения и приема пачки радиоимпульсов для компенсации ЧМ доплеровских сигналов, что увеличивает время получения важнейшей информации о цели (повышенная точность определения скорости одиночной цели, разрешение высокоманевренных целей по скорости в групповой цели). Первый период излучения и приема пачки радиоимпульсов выполняется в режимах обнаружения и определения параметров цели для определения дальности цели или группы целей. Второй период излучения и приема пачки радиоимпульсов выполняется в режимах сопровождения и разрешения целей для повышения ОСШ и уточнения скорости цели или разрешения целей по скорости в выбранной группе.
В заявляемом изобретении время получения важнейшей информации о цели (повышенная точность определения скорости одиночной высокоманевренной цели, разрешение целей по скорости в групповой цели) уменьшено в два раза, так как компенсация паразитной ЧМ доплеровских сигналов высокоманевренных целей достигается за время одного периода излучения и приема пачки радиоимпульсов.
Техническим результатом заявляемого изобретения является уменьшение количества периодов излучения и приема пачек радиоимпульсов в ИД РЛС для компенсации ЧМ доплеровских сигналов высокоманевренных целей.
Указанный технический результат достигается тем, что в известное устройство, содержащее последовательно соединенные ЦФКС 1, вход которого является входом устройства, СФ 2, формирователь ДВП 3, поэлементный умножитель матриц 4, формирователь ДЧП 5 и вычислитель модуля 6, а также последовательно подключенные к первому выходу формирователя ДВП 3 формирователь сигнала АФ 7, вычислитель амплитудного спектра 8, вычислитель центра симметрии амплитудного спектра 9 и формирователь матрицы опорного сигнала 10, выход которого соединен со вторым входом поэлементного умножителя матриц 4, введен блок пороговой обработки 11, вход которого соединен с выходом вычислителя модуля 6, а выход является выходом устройства; второй выход формирователя ДВП 3 подключен ко второму входу формирователя ДЧП 5, а управляющий выход блока пороговой обработки 11 соединен с управляющим входом формирователя ДВП 3.
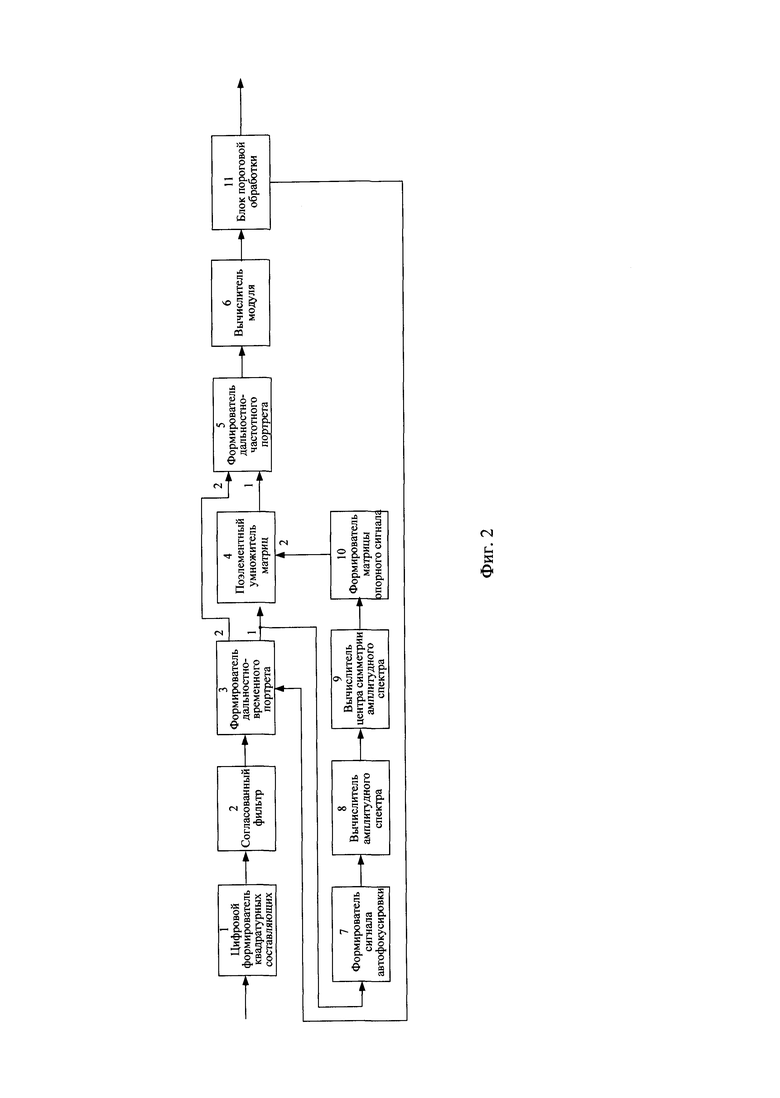
Благодаря введению в известное устройство-прототип совокупности существенных отличительных признаков, предлагаемое устройство обеспечивает технический результат изобретения - уменьшение количества периодов излучения и приема пачек радиоимпульсов в ИД РЛС для компенсации ЧМ доплеровских сигналов высокоманевренных целей. Сущность предлагаемого изобретения поясняется структурной схемой, приведенной на фиг. 2, где обозначено:
1 - ЦФКС;
2 - СФ;
3 - формирователь ДВП;
4 - поэлементный умножитель матриц;
5 - формирователь ДЧП;
6 - вычислитель модуля;
7 - формирователь сигнала АФ;
8 - вычислитель амплитудного спектра;
9 - вычислитель центра симметрии амплитудного спектра;
10 - формирователь матрицы опорного сигнала;
11 - блок пороговой обработки.
Входом устройства является вход ЦФКС 1, выход которого соединен со входом СФ 2, выход которого подключен ко входу формирователя ДВП 3, первый выход которого связан со первым входом поэлементного умножителя матриц 4, выход которого соединен с первым входом формирователя ДЧП 5; второй выход формирователя ДВП 3 подключен ко второму входу формирователя ДЧП 5, выход которого соединен со входом вычислителя модуля 6; к первому выходу формирователя ДВП подключен также формирователь сигнала АФ 7, выход которого соединен со входом вычислителя амплитудного спектра 8, выход которого связан со входом вычислителя центра симметрии амплитудного спектра 9, выход которого соединен со входом формирователя матрицы опорного сигнала 10, выход которого подключен ко второму входу поэлементного умножителя матриц 4; вход блока пороговой обработки 11, соединен с выходом вычислителя модуля 6, первый выход блока пороговой обработки 11 является выходом устройства, а второй управляющий выход связан с управляющим входом формирователя ДВП 3.
Устройство ЦОС ИД РЛС с компенсацией паразитной ЧМ доплеровских сигналов в режимах обнаружения и определения параметров цели за один период излучения и приема пачки радиоимпульсов работает следующим образом.
На вход устройства с выхода приемника РЛС поступает аналоговый сигнал промежуточной частоты. Сигнал подается на вход ЦФКС 1, в котором цифровым способом формируются отсчеты квадратурных составляющих (сигнал преобразуется в цифровую форму, умножается на экспоненту, фильтруется в цифровых фильтрах нижних частот с последующей децимацией выходных отсчетов) [6].
Отсчеты комплексной огибающей (КО) сигнала поступают на вход СФ 2, в котором выполняется согласованная фильтрация эхосигналов во временной области с помощью нерекурсивного цифрового фильтра или в частотной области с использованием метода «быстрой» свертки [6].
Далее отсчеты пачки эхосигналов периода зондирования с выхода СФ 2 поступают в формирователь ДВПЗ. Отсчеты записываются в соответствующий данному периоду зондирования столбец двумерной матрицы ДВП. За период накопления пачки эхосигналов в формирователе 3 формируется ДВП одиночной или групповой цели.
Отсчеты сигналов формирователя ДВП 3 поступают в формирователь ДЧП 5, в котором вычисляются отсчеты ДПФ доплеровских сигналов, соответствующих каждому элементу дальности. Полученные отсчеты ДЧП поступают в вычислитель модулей 6.
В вычислителе модулей 6 определяются модули комплексных отсчетов спектров доплеровских сигналов, которые после сравнения с порогом в блоке пороговой обработки 11 поступают на выход устройства и могут использоваться для обнаружения, оценки дальности и грубой оценки скорости высокоманевренных целей.
После обнаружения и оценки параметров цели с управляющего выхода блока пороговой обработки 11 на управляющий вход формирователя ДВП 3 поступает целеуказание о дальности движущейся высокоманевренной цели (iD - номер строки в двумерной матрице ДЧП с максимальной амплитудой, соответствующий дальности цели и NЕ - количество строк отсчетов по дальности в двумерной матрице ДЧП, соответствующих оценке длительности по дальности цели).
После получения целеуказаний о дальности высокоманевренной цели из формирователя ДВП 3 считываются NE строк, симметрично расположенных относительно целеуказания по дальности iD, в формирователь сигнала АФ 7, в котором формируются NE сигналов автофокусировки (для каждого канала дальности) путем формирования сдвинутых во времени и комплексно-сопряженных доплеровских сигналов, перемножения их, инвертирования знака у мнимой составляющей каждого полученного комплексного отсчета (для упрощения реализации устройства).
С выхода формирователя 7 сигналы АФ поступают в вычислитель амплитудного спектра 8, в котором рассчитываются их ДПФ с помощью алгоритма БПФ и его модуль. Затем вычисляется усредненный амплитудный спектр из входных NE амплитудных спектров сигналов АФ (некогерентное накопление спектров для повышения ОСШ) и из результирующего сигнала исключается математическое ожидание.
С выхода вычислителя 8 усредненный центрированный амплитудный спектр сигнала АФ поступает в вычислитель центра симметрии амплитудного спектра 9, в котором методом «быстрой» свертки вычисляется автосвертка усредненного центрированного амплитудного спектра и определяется координата, соответствующая максимуму вычисленной функции [6].
Полученное в 9 значение координаты используется в формирователе матрицы опорного сигнала 10 для вычисления индекса ЧМ доплеровского сигнала и формирования опорного сигнала, необходимого для компенсации во входном сигнале паразитной ЧМ. На выходе 10 формируется матрица опорного сигнала, у которой каждая строка равна отчетам найденного опорного сигнала, а число строк равно NE - числу элементов дальности в периоде зондирования, симметрично расположенных относительно целеуказания по дальности iD.
В поэлементном умножителе матриц 4 выполняется перемножение матриц, поступающих с первого выхода формирователя ДВП 3 по запросу из блока пороговой обработки 11 и формирователя матрицы опорного сигнала 10, результатом которого является двумерная матрица, каждый элемент которой представляет собой произведение соответствующих элементов матриц. На выходе умножителя 4 формируются доплеровские сигналы со скомпенсированной паразитной ЧМ, обусловленной ускоренным движением целей.
Далее полученные отсчеты сигналов поступают в формирователь ДЧП 5, в котором вычисляются отсчеты ДПФ демодулированных доплеровских сигналов, соответствующих каждому элементу дальности. Полученные отсчеты ДЧП поступают в вычислитель модуля 6.
В вычислителе модулей 6 определяются модули комплексных отсчетов спектров доплеровских сигналов, которые поступают в блок пороговой обработки 11.
После сравнения модулей отсчетов ДЧП с порогом в блоке пороговой обработки 11 сигналы поступают на выход устройства и могут использоваться для подтверждения обнаружения и оценки дальности цели, а также для уточнения скорости одиночной цели или разрешения высокоманевренных целей в группе.
Таким образом, предлагаемое изобретение дает технический результат, заключающийся в компенсации паразитной ЧМ доплеровских сигналов высокоманевренных целей за один период излучения и приема пачки радиоимпульсов, которая повышает ОСШ и разрешение по скорости в ИД РЛС в режимах обнаружения и определения параметров высокоманевренных целей.
Рассмотрим преобразование сигналов в устройстве ЦОС ИД РЛС с компенсацией ЧМ доплеровских сигналов за один период излучения и приема пачки радиоимпульсов с линейной частотной модуляцией (ЛЧМ).
Выражение для комплексной огибающей доплеровского ЛЧМ сигнала, соответствующего заданной дальности и сформированного из эхосигнала от движущейся одиночной цели, находящейся на указанной дальности, можно представить в виде:

где U0 - амплитуда сигнала;
 - центральная частота ЛЧМ сигнала;
- центральная частота ЛЧМ сигнала;
 - индекс модуляции;
- индекс модуляции;
Δωd - девиация частоты;
Тс - длительность сигнала;
ϕ0 - начальная фаза (далее положим равной нулю).
Закон изменения мгновенной частоты в интервале 0≤t≤Тс:
После обработки сигналов в ЦФКС 1, СФ 2, формирователе ДВП 3, формирователе ДЧП 5, вычислителе модуля 6 и блоке пороговой обработки 11 из ДВП 3 (матрица размером Nкд каналов дальности на Nкс каналов скорости) в формирователь сигнала АФ 7 поступают NE строк дискретных сигналов  состоящих из отсчетов КО доплеровских сигналов, в котором формируются NE дискретных сигналов АФ по одинаковому правилу для всех каналов дальности:
состоящих из отсчетов КО доплеровских сигналов, в котором формируются NE дискретных сигналов АФ по одинаковому правилу для всех каналов дальности:

где Тп=1/Fп - период и частота повторения зондирующих сигналов;
 - сдвинутый во времени на Nсдв << Nкс отсчетов сигнал относительно
- сдвинутый во времени на Nсдв << Nкс отсчетов сигнал относительно 
 - комплексно-сопряженный сигнал
- комплексно-сопряженный сигнал 
Представим сигналы  и
и  как радиоимпульсы с ЛЧМ:
как радиоимпульсы с ЛЧМ:

где 

где 
где 

где
Тогда сигнал АФ равен:
Из полученных выражений следует, что сигнал АФ  представляет собой отрезок комплексной гармоники длительностью Nкс - Nсдв ≈ Nкс с частотой - μNсдвTп.
представляет собой отрезок комплексной гармоники длительностью Nкс - Nсдв ≈ Nкс с частотой - μNсдвTп.

В общем случае при наличии нескольких целей (от двух и более), спектр сигнала АФ становится симметричным относительно спектральной составляющей с частотой μМсдвТп (не обязательно максимальной), используемой для оценки параметра μ. Количество спектральных составляющих в спектре сигнала автофокусировки равно 2Nцелей - 1.
Для формирования опорного сигнала, необходимого для компенсации паразитной ЧМ, требуется найти индекс модуляции μ, который однозначно связан с полученной частотой центра симметрии спектра сигнала АФ.
Определим указанную связь в доплеровских сигналах на примере дискретных выходных сигналов ДВП длиной Nкс отсчетов. Полагаем, что при малом искусственном сдвиге сигнала на величину Nсдв << Nкс все гармоники сигнала АФ близко расположены относительно центра симметрии спектра, т.е. сигнал узкополосный.
Частота центра симметрии спектра сигнала АФ, совпадающая с центральной спектральной составляющей (не обязательно максимальной), равна:
После вычисления БПФ размером Nкс имеем в спектре центральную составляющую kцс (центр симметрии спектра), связанную с μ следующим образом:
 }
}
Для получения частоты сигнала АФ всегда с одинаковым (положительным) знаком в формирователе 4 выполним предварительно перед процедурой БПФ инвертирование знака каждого нечетного отсчета сигнала АФ
 при
при 
При использовании сигналов АФ без инвертирования в ситуациях, дающих расстройку при ±Δƒ, спектральные составляющие будут находиться в районе нулевой частоты, что представляет дополнительные сложности при программировании со знаком частотных составляющих. Поэтому применяется инвертирование нечетных отсчетов или сдвиг по частоте на половину частоты дискретизации.
После выполнения БПФ номер центральной спектральной составляющей будет находиться в центре диапазона от 0 до NБПФ-1:
Тогда выражения для ƒцс и μ можно представить в виде:

Однако в спектре сигнала АФ, содержащем несколько спектральных составляющих разного уровня (в общем случае, при условии наличия нескольких целей), сложно найти центральную спектральную составляющую ƒцс, которая не обязательно является максимальной. Для этого в вычислителе центра симметрии амплитудного спектра 6 используется процедура автосвертки (вычисление автосвертки амплитудного спектра инвертированного сигнала АФ), позволяющая найти центр симметричного спектра.
Для устранения «треугольной составляющей» в сигнале автосвертки, обусловленной наличием постоянной составляющей (от огибающей помех) в модуле амплитудного спектра, в вычислителе 9 предварительно применяется процедура центрирования сигналов амплитудного спектра. Это повысит точность определения максимума сигнала автосвертки при наличии помех.
После вычисления автосверток центральные спектральные составляющие (центры симметрии спектров) станут максимальными, независимо от их исходных значений и их станет возможно определить с помощью процедуры определения максимума.
После вычисления линейной автосвертки номер максимального отсчета автосвертки амплитудного спектра инвертированного сигнала АФ будет равен:

Откуда
и экспериментально найденный индекс ЧМ доплеровского сигнала
В формирователе матрицы опорного сигнала 10 для каждого канала дальности NE ДВП 3 формируется единый опорный сигнал:

В поэлементном умножителе матриц 4 выполняется перемножение отсчетов каждой из NE строк ДВП 3 на отсчеты опорного сигнала 
При условии равенства μ*=μ происходит демодуляция ЧМ сигналов каждого канала дальности ДВП 3 и в формирователь ДЧП 5 поступают из поэлементного умножителя матриц 4 реализации сигналов комплексных гармоник:

где 
В формирователе 5 в каждой строке с помощью процедуры БПФ вычисляется спектр поступающей информации. В вычислителе модуля 6 выделяется амплитудный спектр сигнала каждой строки матрицы формирователя ДЧП 5.
Компенсация паразитной ЧМ приводит к сжатию спектра по оси скоростей и соответствующему увеличению его максимального значения и ОСШ, что важно для подтверждения обнаружения и сопровождения цели.
Повышение разрешающей способности по скорости, обусловленное сжатием спектра, также является важным результатом, позволяющим разрешить по скорости движущиеся ускоренно с близкими скоростями цели.
Таким образом, предлагаемое устройство ЦОС позволяет осуществить в ИД РЛС демодуляцию паразитной ЧМ доплеровских сигналов за один период излучения и приема пачки радиоимпульсов. Это уменьшает время получения важной информации о параметрах обнаруженных высокоманевренных целей (без использования второго излучения и приема пачки радиоимпульсов): повышенное ОСШ для подтверждения обнаружения и улучшенную разрешающую способность РЛС по скорости для разрешения близкорасположенных высокоманевренных целей в группе.
Результаты проведенных экспериментальных исследований разработанного устройства компенсации паразитной ЧМ за один период излучения и приема пачки радиоимпульсов показали его работоспособность и высокую эффективность применения в ИД РЛС, предназначенных для работы с близкорасположенными целями, движущимися с переменной скоростью.
Таким образом, подтверждена правильность функционирования разработанного устройства и высокая эффективность его использования при обработке эхосигналов от воздушных ускоренно движущихся целей, заключающаяся в увеличении ОСШ и повышении разрешения по скорости практически до потенциально возможных значений за один период излучения и приема пачки радиоимпульсов.
Источники информации:
1. Дудник П.И., Ильчук А.Р., Татарский Б.Г. Многофункциональные радиолокационные системы. Уч. пособие для вузов / под ред. Б.Г. Татарского. - М.: Дрофа, 2007. - 283 с.
2. Маркович И.И., Завтур Е.Е. Методы цифровой обработки сигналов, отраженных от высокоманевренных воздушных целей // Вестник воздушно-космической обороны. - Научно-технический журнал ПАО «НПО «Алмаз» им. акад. А.А. Расплетина».- 2016 - Вып.3(11). - С.17-23.
3. Маркович И.И. Функция неопределенности сигналов при квазиоптимальной обработке в линейном фильтре с переменными параметрами // Радиотехника. - 1989. - №6. - С.55-56.
4. Патент 2657462 РФ, МПК 2006, G01S 13/53. Устройство цифровой обработки сигналов в импульсно-доплеровской РЛС с компенсацией ЧМ доплеровских сигналов / И.И. Маркович. Заявитель и патентообладатель - ФГАОУ ВО «Южный федеральный университет». - 2017122902. Заявл. 28.06.2017. Опубл. 14.06.2018. Бюл. №17.
5. Маркович И.И. Цифровая обработка сигналов в системах и устройствах: монография. - Ростов-на-Дону: Изд-во ЮФУ, 2012. - 236 с.
Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских радиолокационных станциях (РЛС), работающих с высокоманевренными целями, движущимися с переменной радиальной скоростью. Техническим результатом является уменьшение количества периодов излучения и приема пачек радиоимпульсов в импульсно-доплеровских РЛС для компенсации частотной модуляции доплеровских сигналов высокоманевренных целей. Заявленное устройство содержит цифровой формирователь квадратурных составляющих, согласованный фильтр, формирователь дальностно-временного портрета, поэлементный умножитель матриц, формирователь дальностно-частотного портрета, вычислитель модуля и блок пороговой обработки, а также формирователь сигнала автофокусировки, вычислитель амплитудного спектра, вычислитель центра симметрии амплитудного спектра, формирователь матрицы опорного сигнала. 2 ил.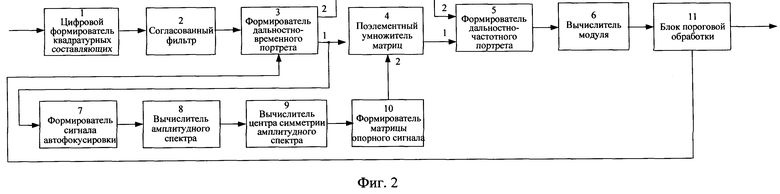
Устройство цифровой обработки сигналов в импульсно-доплеровской РЛС с компенсацией ЧМ доплеровских сигналов за один период излучения и приема пачки радиоимпульсов, содержащее последовательно соединенные цифровой формирователь квадратурных составляющих 1, вход которого является входом устройства, согласованный фильтр 2, формирователь дальностно-временного портрета 3, поэлементный умножитель матриц 4, формирователь дальностно-частотного портрета 5 и вычислитель модуля 6, а также последовательно подключенные к первому выходу формирователя дальностно-временного портрета 3 формирователь сигнала автофокусировки 7, вычислитель амплитудного спектра 8, вычислитель центра симметрии амплитудного спектра 9 и формирователь матрицы опорного сигнала 10, выход которого соединен со вторым входом поэлементного умножителя матриц 4, отличающееся тем, что введен блок пороговой обработки 11, вход которого соединен с выходом вычислителя модуля 6, а выход является выходом устройства; второй выход формирователя дальностно-временного портрета 3 подключен ко второму входу формирователя дальностно-частотного портрета 5, а управляющий выход блока пороговой обработки 11 соединен с управляющим входом формирователя дальностно-временного портрета 3.
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ МИГРАЦИИ ЦЕЛЕЙ ПО ДАЛЬНОСТИ | 2017 |
|
RU2673679C1 |
| СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ИЗМЕРЕНИЕМ ДАЛЬНОСТИ, РАДИАЛЬНОЙ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2016 |
|
RU2626380C1 |
| Устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов | 2018 |
|
RU2713501C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1997 |
|
RU2109306C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2015 |
|
RU2594005C1 |
| СПОСОБ ПОЛУЧЕНИЯ МИКРОПОРИСТЫХ И КОЖЕПОДОБНЫХ РЕЗИН | 1961 |
|
SU215481A1 |
| US 3889261 A, 10.06.1975 | |||
| JPH 11223673 A, 17.08.1999. | |||

