Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ),
В СЭП осуществляют непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства (ЗУ) обеспечивают заряд АБ, а стабилизатор напряжения (СН) и разрядные устройства (РУ) обеспечивают питание бортовой аппаратуры (БА). В зависимости от степени заряженности АБ производят запрет или разрешение работы ЗУ и РУ.
Ориентацию БФ на Солнце осуществляют, как правило, двумя способами, а именно:
1) путем изменения углового положения КА вокруг центра масс, обеспечивая при этом условие cosα=1=const, где α - угол между перпендикуляром к поверхности БФ и направлением на Солнце;
2) путем обеспечения ориентации и движения КА в орбитальной системе координат (продольная ось КА постоянно направлена к центру Земли) и выполнения перекладок панелей солнечных батарей (ПСБ) по заданной программе.
В последнем случае КА оснащают приводами, используемыми для выполнения перекладок ПСБ (изменения положения ПСБ относительно координатных осей КА) или только по крену, или по крену и тангажу. В данном случае углы крена и тангажа соответствуют схеме полета, когда ПСБ расположены вдоль вектора движения КА.
Вольт-амперная характеристика (ВАХ) БФ, представляющая собой зависимость между напряжением и током БФ, определяется в качестве эталонной в лабораторных условиях в процессе проведения наземных испытаний БФ. Однако эталонная ВАХ БФ, как правило, отличается от фактической ВАХ БФ, получаемой при штатной эксплуатации КА. Причиной этого является влияние температуры БФ на характеристики фотоэлектрических преобразователей (ФЭП). Кроме того, происходит постепенная деградация электрических характеристик ФЭП, что также приводит к изменению ВАХ БФ. Своевременный и правильный учет указанных изменений позволяет эксплуатировать СЭП без нарушения энергобаланса и оптимально планировать работу целевой аппаратуры.
Известен способ управления СЭП КА (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение. Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г., аналог), заключающийся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; задании напряжения рабочей точки вольт-амперной характеристики батареи фотоэлектрической, контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности (или напряжения) данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности (напряжения) данной аккумуляторной батареи.
В аналоге для максимального отбора мощности БФ с целью исключения нарушения энергобаланса применяют экстремальный регулятор мощности (ЭРМ) БФ, который работает в автоматическом режиме. При включении по разовой команде с наземного комплекса управления экстремального регулятора мощности происходит пошаговое определение величины фактической максимальной мощности БФ (оптимальной точки ВАХ), зависящей от ее текущей освещенности и температуры, а затем поддержание этого режима работы СЭП. Однако функционирование ЭРМ возможно только тогда, когда напряжение БФ соответствует оптимальному значению, при этом мощность БФ должна полностью использоваться для питания нагрузки. В противном случае ЭРМ, в силу своего принципа действия, не может функционировать, а работа СЭП происходит на спадающей части ВАХ БФ, где напряжение БФ превышает оптимальное напряжение, а потребляемый ток зависит от потребляемой нагрузкой мощности.
Недостатком аналога является то, что в процессе эксплуатации КА не учитываются изменения параметров БФ во времени, в том числе и величины максимальной фактической мощности БФ, поэтому оптимальное планирование работы целевой аппаратуры может быть затруднено, а в отдельных случаях возможно нарушение энергобаланса СЭП, если среднесуточная мощность потребления превышает номинальное значение.
Известен способ управления автономной системой электропитания космического аппарата (патент №2467449, прототип), содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; после восстановления ориентации батареи фотоэлектрической на Солнце производят питание оставшейся включенной части бортовой нагрузки от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей или по внешней разовой команде.
Недостатком прототипа является то, что в силу неопределенности координат оптимальной рабочей точки (оптимальное напряжение и соответствующее ему значение максимальной фактической мощности БФ) имеется вероятность неправильного планирования работы целевой аппаратуры и, как следствие, нарушение энергобаланса СЭП с последующим возникновением аварийной ситуации.
Задачей предлагаемого изобретения является создание способа управления системой электропитания КА, позволяющего существенно уменьшить вероятность возникновения аварийной ситуации из-за нарушения энергобаланса СЭП путем оперативной оценки фактической максимальной мощности расчетно-экспериментальным методом.
Указанная задача решается тем, что в способе управления системой электропитания космического аппарата (КА), содержащей фотоэлектрическую батарею (БФ) и n аккумуляторных батарей (АБ), стабилизатор напряжения, включенный между БФ и нагрузкой, и по n зарядных и разрядных устройств, заключающемся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения системы электропитания (СЭП); введении запрета на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снятии этого запрета при повышении уровня заряженности данной АБ; формировании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры (БА) при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности, запрете работы всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; произведении сброса запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности, оценку фактической максимальной мощности БФ проводят расчетно-экспериментальным путем, для чего вольт-амперную характеристику (ВАХ), представляющую собой графическую зависимость между током и напряжением БФ и составленную по результатам испытаний штатной БФ в лабораторных условиях при нормальной температуре окружающей среды, выбирают в качестве базовой ВАХ; в процессе штатной эксплуатации БФ в составе СЭП КА определяют координаты не менее n характерных точек фактической ВАХ БФ, отличающихся от координат базовой ВАХ в силу воздействия на ФЭП факторов космического пространства; при этом измерения напряжения и соответствующего ему тока БФ осуществляют, используя телеметрическую информацию, полученную для одного и того же значения температуры и одинаковых условий освещенности ФЭП; с целью определения координат характерных точек фактической ВАХ БФ формируют режимы скачкообразного изменения тока нагрузки СЭП, применяя в качестве переменной нагрузки находящиеся в режиме заряда аккумуляторные батареи; причем в качестве координат первой характерной точки используют значения тока и напряжения БФ, соответствующих режиму питания бортовой аппаратуры (БА) и заряда (n-1) аккумуляторных батарей, а для определения координат n-й характерной точки используют значения аналогичных параметров БФ, соответствующих режиму питания только БА; для каждой характерной точки фактической ВАХ БФ вычисляют разность напряжений ΔUi между базовой и фактической ВАХ, определяемых при фиксированной величине тока БФ; полученные n=i значений ΔUi суммируют и находят их среднее арифметическое значение ΔUСР; по данным базовой ВАХ составляют графическую зависимость PБФ=f(UБФ), где PБФ - мощность БФ, равная произведению напряжения на ток БФ, UБФ - текущее значение напряжения БФ; на этой зависимости фиксируют значение оптимального напряжения (UБФ)опт, при котором штатной БФ в лабораторных условиях генерируется максимальная мощность; вычитают из (UБФ)опт значение ΔUСР и получают расчетную величину напряжения БФ Uрасч; значение мощности БФ, определенного по базовой ВАХ для UБФ=Uрасч, принимают в качестве фактической максимальной мощности БФ; аналогичную последовательность операций выполняют периодически, например, в каждые 6 месяцев штатной эксплуатации КА.
Пример функциональной схемы СЭП, в которой реализуется предлагаемый способ, приведен на фиг. 1, где обозначено:
1 - батарея фотоэлектрическая;
2 - стабилизатор напряжения (СН) с ЭРМ БФ;
31…3n - зарядные устройства (ЗУ);
41…4n - разрядные устройства (РУ);
51…5n - аккумуляторные батареи;
61…6n - устройства контроля степени заряженности АБ (УКЗАБ);
ОС - вход обратной связи;
3 - вход запрета работы;
7 - нагрузка СЭП (бортовая аппаратура);
8 - датчик пороговый минимального напряжения;
9 - логический элемент m из n;
10 - логический элемент И;
11, 121…12n, 131…13n, 141…14n - R-S триггеры;
15 - логический элемент И;
161…16n, 171…17n - логические элементы ИЛИ.
На фиг. 2 показана типовая вольт-амперная характеристика (зависимость входного напряжения (UБФ) от тока (IБФ) БФ) батареи фотоэлектрической, используемой в СЭП КА. На ВАХ БФ показаны координаты следующих характерных точек: режим короткого замыкания БФ, когда напряжение БФ равно нулю (точка а), напряжение БФ, равное выходному напряжению СЭП (точка б), рабочее напряжение БФ, соответствующее минимальной отбираемой КАС мощности БФ (точка в), номинальное напряжение в рабочей точке БФ (точка г), оптимальное (экстремальное) напряжение БФ, соответствующее ее максимальной мощности (точка д), напряжение БФ на спадающей части ВАХ, соответствующее мощности БФ, равной номинальной мощности в рабочей точке ВАХ БФ (точка е), напряжение БФ на спадающей части ВАХ, соответствующее минимальной мощности потребления нагрузки (точка ж), режим холостого хода БФ или напряжение БФ при нулевом значении тока БФ (точка и). Заштрихованные участки ВАХ соответствуют рабочим участкам, где происходит функционирование БФ без применения экстремального регулятора мощности.
На фиг. 3 приведены типовые зависимости мощности БФ от входного напряжения для двух значений температуры ФЭП, а именно при температуре примерно 25°C (график 1) и 75°C (график 2). Первый график, как правило, получают при наземных испытаниях БФ, а второй график - при штатной эксплуатации КА на световых участках орбиты КА при ориентации панелей БФ перпендикулярно на Солнце. График 2 приведен для всего диапазона изменения напряжения БФ только для иллюстрации предлагаемого технического решения, а для определения фактической максимальной мощности БФ достаточно построить ВАХ между точкам e1 и ж1. Данные зависимости имеют нулевое значение мощности БФ в режимах короткого замыкания (точка а) и холостого хода (точка и), а также максимальное значение мощности БФ (точка д). Заштрихованный участок графика 2 соответствует участку, где экспериментально трудно или невозможно определить координаты фактической ВАХ, причем на этом участке находятся координаты максимальной фактической мощности БФ. Из фиг. 3 видно, что при повышении температуры уменьшается максимальное значение мощности и происходит смещение ВАХ БФ в сторону меньших напряжений. Аналогичную закономерность можно наблюдать при деградации параметров ФЭП во времени. Таким образом, при температуре, равной приблизительно 25°C, БФ генерирует наибольшую, при прочих равных условиях, мощность. Следовательно, возникает необходимость уточнения параметров ФЭП в условиях их эксплуатации в космосе.
Управление автономной системой электропитания космического аппарата осуществляют следующим образом (фиг. 1). СЭП производится непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами, а также панелями солнечных батарей в зависимости от освещенности БФ, входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства обеспечивают заряд АБ 51…5n, а СН и РУ обеспечивают питание БА 7. Цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ 1, а цепи непрерывного управления (ОС) СН и РУ подключены к выходной шине СЭП (на вход БА 7).
В зависимости от степени заряженности АБ производится запрет или разрешение работы ЗУ и РУ. При достижении максимальной степени заряженности конкретной АБ сигнал с выхода "Запрет ЗУ" ее устройства контроля степени заряженности АБ (61…6n на фиг. 1) с помощью R-S триггера (121…12n) запрещает работу ее ЗУ. После разряда АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение ЗУ" УКЗАБ.
При достижении минимального уровня заряженности конкретной АБ сигнал с выхода "Запрет РУ" ее УКЗАБ (61…6n на чертеже), проходя через R-S триггер (141…14n) и логический элемент ИЛИ (171…17n), поступает на вход запрета работы соответствующего РУ. Эта АБ переводится в режим хранения. После заряда данной АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение РУ" УКЗАБ (логические элементы ИЛИ 161…16n, R-S триггеры 141..14n, логические элементы ИЛИ 171…17n).
В случае нештатной ориентации солнечных батарей КА на Солнце происходит нарушение энергобаланса в СЭП. Сигналы с выходов "Запрет РУ" всех УКЗБ поступают на входы логических элементов 9 (m из n) и 10 (логический элемент И).
При аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 9 формируется управляющий сигнал аварийной нагрузки («АН»), который выдается в бортовой комплекс управления для отключения части БА. Этот сигнал запоминается на R-S триггере 11. Запоминание снимается по внешней разовой команде (РК). При отключении БКУ части БА снижается скорость расходования энергии АБ. Остается подключенной часть БА - приборы систем терморегулирования, телеметрии и других необходимых систем. Эти приборы обеспечивают температурные режимы и контроль параметров БА 7. Появляется возможность более длительное время питать нагрузку и продолжать работы по выводу КА из нештатной ситуации. Таким образом, обеспечивается возможность использования средств бортового комплекса управления для адаптивного изменения схемы питания БА 7 в зависимости от текущего состояния энергетических возможностей СЭП.
При аварийном разряде всех n работающих АБ 51…5n до минимального уровня заряженности на выходе логического элемента 10 появляется сигнал, который, проходя через логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n, снимает запрет на работу всех разрядных устройств. Далее, если аварийная ситуация продолжается, происходит синхронный разряд на оставшуюся часть нагрузки всех АБ 51…5n. Имеющаяся емкость АБ используется полностью.
При дальнейшем аварийном разряде выходное напряжение системы снижается до заданного порогового значения, срабатывает датчик пороговый минимального напряжения 8, а поскольку этому предшествовало запоминание управляющего сигнала «АН» на R-S триггере 11, то его сигнал, пройдя через логический элемент И 15 и R-S триггеры (131…13n) и логические элементы ИЛИ (171…17n), запрещает работу всех разрядных устройств и логическим уровнем на входах элементов ИЛИ (171…17n) блокирует прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ 61…6n. Запоминание управляющего сигнала «АН» обеспечивает защиту от обесточивания БА 7 при ложном срабатывании датчика порогового минимального напряжения 8 или при его срабатывании в случае перегрузки по выходным шинам СЭП, не связанной с нарушением ориентации БФ 1 и аварийным разрядом АБ.
После восстановления ориентации БФ 1 на Солнце производят питание оставшейся включенной части БА 7 от БФ 1 через стабилизатор напряжения. Напряжение на выходе СЭП, обеспечиваемое СН, определяется соотношением мощности нагрузки 7, подключенной к выходным шинам СЭП, и мощности, генерируемой БФ 1 и определяемой степенью ее освещенности. Напряжение БФ 1 и, следовательно, напряжение БА 7 может произвольно меняться в течение неопределенного времени, до полного восстановления ориентации, в пределах от 0 до номинального значения. Включенные приборы, естественно, при этом должны сохранять свою работоспособность. Избыток мощности БФ 1 идет на заряд АБ 51…5n.
Поскольку цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ, а цепи непрерывного управления (ОС) СН подключены к выходной шине СЭП, в первую очередь будет обеспечиваться питание БА 7, то есть включенные приборы системы терморегулирования, систем телеметрии и других необходимых систем, которые обеспечат необходимые температурные режимы зарядных устройств и аккумуляторных батарей, а также контроль параметров. При нарушении ориентации БФ 1 на Солнце или уходе КА в тень питание всей БА 7 и заряд АБ 51…5n прекращается. Разряд АБ 51…5n не производится, так как сигнал «Запрет заряда» не снят.
При заряде какой-либо из аккумуляторных батарей 51…5n до некоторого значения емкости сигнал с выхода УКЗАБ «АБ заряжена», пройдя через R-S триггер (131…13n) и логический элемент ИЛИ (171…17n), снимает запрет на работу своего разрядного устройства и блокировку прохождения управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ 61…6n. СЭП переходит в штатный режим работы после заряда всех АБ 51…5n или по РК.
Применение предлагаемого способа управления системой электропитания КА позволяет максимально использовать запасенную емкость АБ и обеспечить питание бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, а также не допустить необратимого разряда АБ 51…5n в случае нарушения энергобаланса.
Определение максимальной фактической мощности БФ осуществляют расчетно-экспериментальным методом. В качестве базовой ВАХ используют вольт-амперную характеристику, полученную в процессе наземных испытаний (в лабораторных условиях) при температуре окружающей среды (примерно 25°C). Фактическая ВАХ из-за воздействия факторов космического пространства сдвигается влево в сторону меньших напряжений, причем сдвиг получается практически параллельный по отношению к базовой ВАХ, а максимальное значение фактической мощности БФ уменьшается, причем координаты максимальной фактической мощности БФ соответствуют при некотором значении напряжения БФ Uрасч текущим координатам базовой ВАХ (фиг. 3, точка д2). Текущие координаты базовой ВАХ, соответствующие координатам максимальной фактической мощности БФ, находят следующим образом.
Сначала определяют (в процессе штатной эксплуатации БФ в составе СЭП КА) координаты не менее n характерных точек фактической ВАХ БФ, причем для получения достоверной информации все измерения электрических характеристик БФ осуществляют, используя телеметрическую информацию, полученную для одного и того же значения температуры и одинаковых условий освещенности ФЭП. Режимы скачкообразного изменения тока нагрузки СЭП формируют, применяя в качестве переменной нагрузки находящиеся в режиме заряда аккумуляторные батареи. Когда мощность БФ, используемая для питания БА и заряда АБ, меньше номинальной мощности, то в силу принципа действия СЭП, применяемой в составе КА, скачкообразное изменение (уменьшение) суммарного тока заряда АБ приводит к соответствующему скачкообразному изменению тока и напряжения БФ (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, раздел 8. Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г.). Отключая в соответствии с логикой управления СЭП от заряда одну или несколько АБ после их восполнения, можно определить координаты n характерных точек фактической ВАХ БФ. Необходимо отметить, что для осуществления этих режимов не требуется выдачи команд управления, они автоматически формируются в процессе штатной эксплуатации СЭП по срабатыванию сигнального датчика давления.
В качестве координат первой характерной точки используют значения тока и напряжения БФ, соответствующих режиму питания бортовой аппаратуры (БА) и заряда (n-1) аккумуляторных батарей (фиг. 3, точка е2), а для определения координат n-й характерной точки используют значения аналогичных параметров БФ, соответствующих режиму питания только БФ, когда все АБ восполнены и отключены от заряда (фиг. 3, точка ж2). На фиг. 2 этот диапазон ВАХ заштрихован. Для нахождения координат промежуточных характерных точек используют режимы СЭП, когда от заряда одновременно отключены два или более АБ (фиг. 3, точка з2). При этом соблюдаются условия освещенности ФЭП, а именно угол α между плоскостью БФ и направлением на Солнце равен 90 градусам.
Для каждой характерной точки фактической ВАХ БФ вычисляют разность напряжений ΔUi между базовой и фактической ВАХ, определяемых при фиксированной величине тока БФ (фиг. 3), а полученные n=i значений ΔUi суммируют и находят их среднее арифметическое значение ΔUСР.
Дальнейшие расчеты выполняют в соответствии с фиг. 3 в следующей последовательности: по данным базовой ВАХ составляют графическую зависимость PБФ=f(UБФ), где PБФ - мощность БФ, равная произведению напряжения на ток БФ, UБФ - текущее значение напряжения БФ; на этой зависимости фиксируют значение оптимального напряжения (UБФ)опт, при котором штатной БФ в лабораторных условиях генерируется максимальная мощность; вычитают из (UБФ)опт значение ΔUСР и получают расчетную величину напряжения БФ Uрасч; значение мощности БФ, определенной по базовой ВАХ для UБФ=Uрасч, принимают в качестве фактической максимальной мощности БФ. Поскольку в процессе штатной эксплуатации СЭП КА происходит деградация ФЭП, приводящая в конечном итоге к изменению фактической ВАХ БФ, то аналогичную последовательность операций выполняют периодически, например, в каждые 6 месяцев штатной эксплуатации КА, поскольку за этот промежуток времени может произойти заметная деградация параметров ФЭП.
На фиг. 3 заштрихованный участок ВАХ соответствует режиму функционирования БФ, где происходит уменьшение максимальной фактической мощности в процессе ее эксплуатации из-за деградации параметров ФЭП.
Предлагаемый способ определения фактической максимальной мощности БФ отличается высокой точностью и не требует применения специального экстремального регулятора мощности или иного сложного прибора для нахождения этой мощности экспериментальным путем.
Таким образом, применение предлагаемого способа управления системой электропитания КА позволяет существенно уменьшить вероятность возникновения аварийной ситуации из-за нарушения энергобаланса, что достигается путем периодического определения значения фактической максимальной мощности БФ и соответствующего ей напряжения БФ и использования полученных данных для правильного прогнозирования энергобаланса СЭП и оптимального планирования работы целевой аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2675590C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2682725C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2537389C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С БОЛЬШИМ СРОКОМ АКТИВНОГО СУЩЕСТВОВАНИЯ | 2016 |
|
RU2633997C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ МОДУЛЬНОГО ИСПОЛНЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2585171C1 |



Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батарей фотоэлектрических (БФ), а в качестве накопителей энергии - аккумуляторных батарей (АБ). Техническим результатом является создание способа управления системой электропитания КА, позволяющего существенно уменьшить вероятность возникновения аварийной ситуации из-за нарушения энергобаланса СЭП путем оперативной оценки фактической максимальной мощности расчетно-экспериментальным методом. Указанный технический результат достигается тем, что в способе управления системой электропитания космического аппарата (КА), содержащей фотоэлектрическую батарею (БФ) и n аккумуляторных батарей (АБ), стабилизатор напряжения, включенный между БФ и нагрузкой, и по n зарядных и разрядных устройств, заключающемся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжений системы электропитания (СЭП); введении запрета на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снятии этого запрета при повышении уровня заряженности данной АБ; формировании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры (БА) при аварийном разряде нескольких m (m ≤ n) АБ до минимального уровня заряженности, запрете работы всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; произведении сброса запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности, оценку фактической максимальной мощности БФ проводят расчетно-экспериментальным путем, для чего вольт-амперную характеристику (ВАХ), представляющую собой графическую зависимость между током и напряжением БФ и составленную по результатам испытаний штатной БФ в лабораторных условиях при нормальной температуре окружающей среды, выбирают в качестве базовой ВАХ; в процессе штатной эксплуатации БФ в составе СЭП КА определяют координаты не менее n характерных точек фактической ВАХ БФ, отличающихся от координат базовой ВАХ в силу воздействия на ФЭП факторов космического пространства; при этом измерения напряжения и соответствующего ему тока БФ осуществляют, используя телеметрическую информацию, полученную для одного и того же значения температуры и одинаковых условий освещенности ФЭП; с целью определения координат характерных точек фактической ВАХ БФ формируют режимы скачкообразного изменения тока нагрузки СЭП, применяя в качестве переменной нагрузки находящиеся в режиме заряда аккумуляторные батареи; причем в качестве координат первой характерной точки используют значения тока и напряжения БФ, соответствующих режиму питания бортовой аппаратуры (БА) и заряда (n-1) аккумуляторных батарей, а для определения координат n-й характерной точки используют значения аналогичных параметров БФ, соответствующих режиму питания только БА; для каждой характерной точки фактической ВАХ БФ вычисляют разность напряжений ΔUi между базовой и фактической ВАХ, определяемых при фиксированной величине тока БФ; полученные n=i значений ΔUi суммируют и находят их среднее арифметическое значение ΔUСР; по данным базовой ВАХ составляют графическую зависимость PБФ=f(UБФ), где PБФ - мощность БФ, равная произведению напряжения на ток БФ, UБФ - текущее значение напряжения БФ; на этой зависимости фиксируют значение оптимального напряжения (UБФ)опт, при котором штатной БФ в лабораторных условиях генерируется максимальная мощность; вычитают из (UБФ)опт значение ΔUCP и получают расчетную величину напряжения БФ Uрасч; значение мощности БФ, определенного по базовой ВАХ для UБФ=Uрасч, принимают в качестве фактической максимальной мощности БФ; аналогичную последовательность операций выполняют периодически, например в каждые 6 месяцев штатной эксплуатации КА. 3 ил.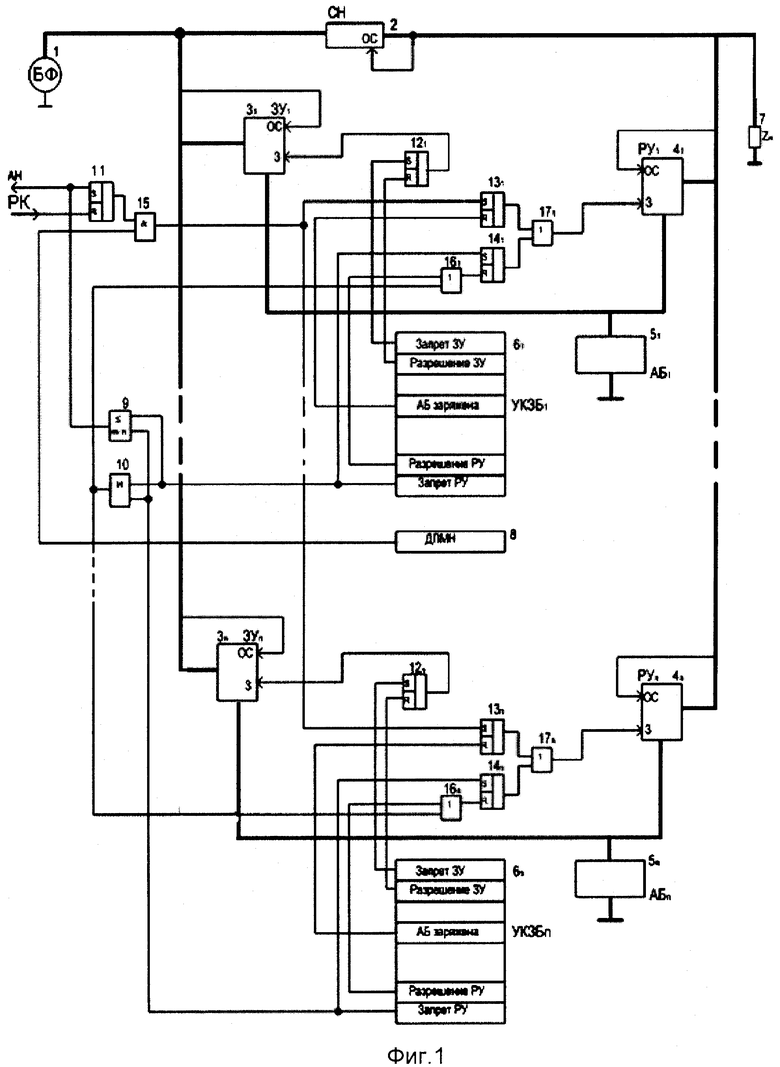
Способ управления системой электропитания космического аппарата (КА), содержащей фотоэлектрическую батарею (БФ) и n аккумуляторных батарей (АБ), стабилизатор напряжения, включенный между БФ и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжений системы электропитания (СЭП); вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности данной АБ; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры (БА) при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности; запрещают работу всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; производят сброс запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности, отличающийся тем, что оценку фактической максимальной мощности БФ проводят расчетно-экспериментальным путем, для чего вольт-амперную характеристику (ВАХ), представляющую собой графическую зависимость между током и напряжением БФ и составленную по результатам испытаний штатной БФ в лабораторных условиях при нормальной температуре окружающей среды, выбирают в качестве базовой ВАХ; в процессе штатной эксплуатации БФ в составе СЭП КА определяют координаты не менее n характерных точек фактической ВАХ БФ, отличающихся от координат базовой ВАХ в силу воздействия на ФЭП факторов космического пространства; при этом измерения напряжения и соответствующего ему тока БФ осуществляют, используя телеметрическую информацию, полученную для одного и того же значения температуры и одинаковых условий освещенности ФЭП; с целью определения координат характерных точек фактической ВАХ БФ формируют режимы скачкообразного изменения тока нагрузки СЭП, применяя в качестве переменной нагрузки находящиеся в режиме заряда аккумуляторные батареи; причем в качестве координат первой характерной точки используют значения тока и напряжения БФ, соответствующих режиму питания бортовой аппаратуры (БА) и заряда (n-1) аккумуляторных батарей, а для определения координат n-й характерной точки используют значения аналогичных параметров БФ, соответствующих режиму питания только БА; для каждой характерной точки фактической ВАХ БФ вычисляют разность напряжений ΔUi между базовой и фактической ВАХ, определяемых при фиксированной величине тока БФ; полученные n=i значений ΔUi суммируют и находят их среднее арифметическое значение ΔUСР; по данным базовой ВАХ составляют графическую зависимость РБФ=f(UБФ), где РБФ - мощность БФ, равная произведению напряжения на ток БФ, UБФ - текущее значение напряжения БФ; на этой зависимости фиксируют значение оптимального напряжения (UБФ)опт, при котором штатной БФ в лабораторных условиях генерируется максимальная мощность; вычитают из (UБФ)опт значение ΔUСР и получают расчетную величину напряжения БФ Upacч; значение мощности БФ, определенного по базовой ВАХ для UБФ=Uрасч, принимают в качестве фактической максимальной мощности БФ; аналогичную последовательность операций выполняют периодически, например, в каждые 6 месяцев штатной эксплуатации КА.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2535301C2 |
| US 5455884 A, 03.10.1995 | |||
| US 3984744 A, 05.10.1976. | |||

