Предполагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ).
В СЭП осуществляют непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ и других характеристик СЭП. При этом зарядные устройства (ЗУ) обеспечивают заряд АБ, а стабилизатор напряжения (СН) и разрядные устройства (РУ) обеспечивают питание бортовой аппаратуры (БА). В зависимости от степени заряженности АБ производят запрет или разрешение работы ЗУ и РУ.
Ориентацию БФ на Солнце осуществляют, как правило, двумя способами, а именно:
1) путем изменения углового положения КА вокруг центра масс, обеспечивая при этом условие: cosα = 1 = const, где α - угол между перпендикуляром к поверхности БФ и направлением на Солнце;
2) путем обеспечения ориентации и движения КА в орбитальной системе координат (продольная ось КА постоянно направлена к центру Земли) и выполнения перекладок панелей солнечных батарей (ПСБ) по заданной программе.
В последнем случае КА оснащают приводами, используемыми для выполнения перекладок ПСБ (изменения положения ПСБ относительно координатных осей КА).
Известен способ управления СЭП КА (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г., аналог), заключающийся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности (или напряжения) данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности (напряжения) данной аккумуляторной батареи.
Недостатком аналога является то, что для стабилизации выходного напряжения СЭП используются последовательный стабилизатор напряжения, а также зарядно-разрядные устройства (ЗРУ), в количестве, равном количеству АБ. Подобный способ управления СЭП широко используется в случае применения в составе СЭП никель-водородных аккумуляторных батарей (НВАБ), поскольку для НВАБ характерно изменение ее напряжения в широком диапазоне в зависимости от режима функционирования при циклировании. По этой причине НВАБ не может выполнять функцию стабилизатора напряжения. В конечном итоге это обстоятельство приводит к заметному утяжелению СЭП в целом.
Известен способ управления автономной системой электропитания космического аппарата (патент РФ на изобретение №2467449, кл. H02J 7/34, опубл. 20.11.2012, бюл. №32, прототип), содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m (m ≤ n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры.
Достоинством прототипа является высокая степень живучести СЭП, достигаемая в случае возникновения аварийных ситуаций, связанных с нарушением энергобаланса. Недостатки прототипа те же, что и у аналога.
Задачей предлагаемого изобретения является выбор способа управления системой электропитания КА, позволяющего повысить живучесть и надежность функционирования СЭП.
Указанная задача решается тем, что в способе управления системой электропитания космического аппарата (КА), содержащей включенных параллельно между собой аппаратуру регулирования и контроля (АРК), секционированную на гл частей батарею фотоэлектрическую (БФ), n (n ≥ 1) аккумуляторных батарей (АБ), где m=k⋅n (k ≥ 2), заключающемся в циклировании АБ в режиме заряда-разряда, контроле параметров СЭП, например, выходного напряжения, тока БФ, токов заряда и разряда АБ, текущей электрической емкости каждой АБ; формировании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры (БА) при аварийном разряде АБ до минимального уровня заряженности; отключении всех АБ от нагрузки при снижении выходного напряжения СЭП до заданного минимального значения; включении всех АБ к нагрузке после заряда всех АБ до заданного уровня заряженности, в качестве АРК применяют регулятор избыточной мощности (РИМ) БФ; сброс избытка мощности БФ в зависимости от текущих значений параметров СЭП выполняют путем введения/отключения с помощью РИМ режима короткого замыкания необходимого количества секций БФ; при этом на теневом участке орбиты КА выходное напряжение СЭП поддерживают в диапазоне изменения, соответствующем диапазону изменения напряжений n АБ, находящихся в режиме разряда; причем в составе СЭП используют АБ с пологими вольт-амперными характеристиками, например, литий-ионные АБ; на световом участке орбиты КА осуществляют стабилизацию выходного напряжения СЭП относительно постоянного опорного напряжения, при этом значение опорного напряжения принимают равным максимально допустимому значению выходного напряжения СЭП близким к максимальному зарядному напряжению АБ; сигнал, пропорциональный разности между выходным напряжением СЭП и опорным напряжением, равный ΔU, используют для принудительного изменения и получения необходимого соотношения между мощностью БФ, используемой для питания БА и заряда АБ, и мощностью БФ, рассеиваемой РИМ, таким образом, чтобы ΔU стремился к нулю; причем аккумуляторные батареи заряжают током, пропорциональным разности напряжений на выходной шине СЭП и данной АБ, при этом количество (n) и тип АБ выбирают исходя из параметров БФ и обеспечения энергобаланса СЭП по критериям:
где (IБФ)мax - максимальный ток одной секции БФ, (Iзар)мax = с1⋅Qном.АБ, (Iраз)мax = с2⋅Qном.АБ, с1 и c2 - коэффициенты, характеризующие нагрузочную способность каждой АБ по токам заряда и разряда соответственно, ⋅ Оном.АБ - номинальная электрическая емкость одной АБ, (Iнагр)мах - максимальный ток, потребляемый БА от АБ, k - количество секций БФ, подключенных к одной АБ.
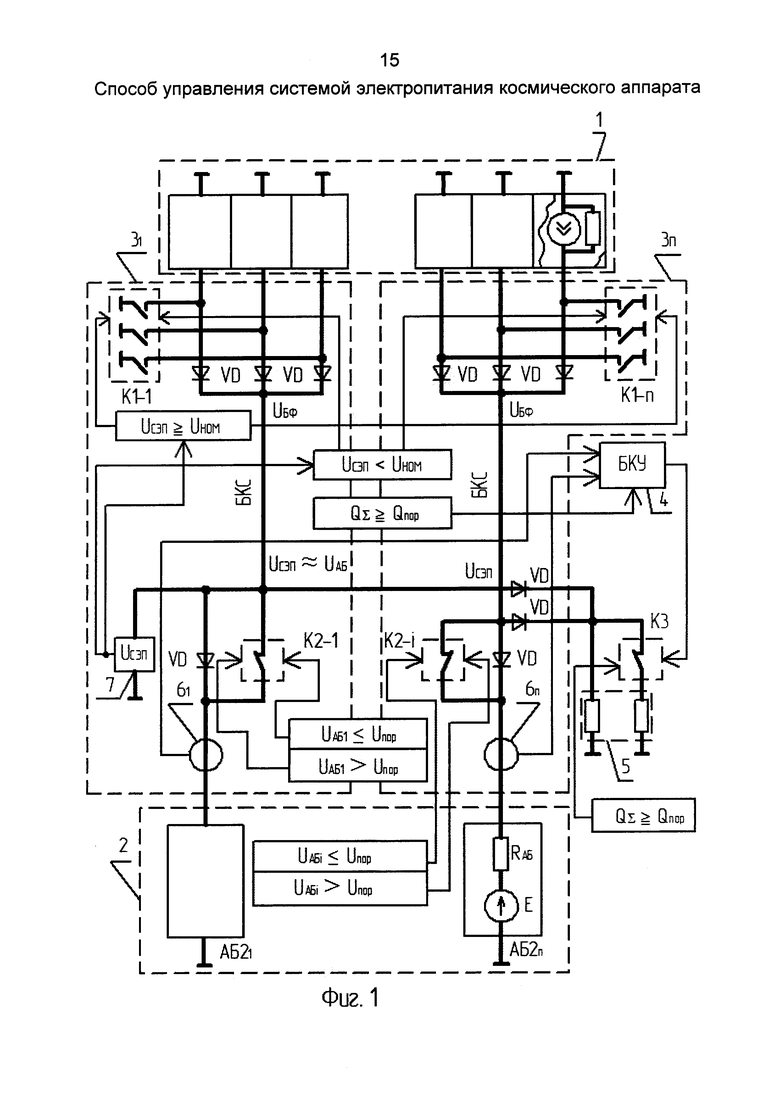
Пример функциональной схемы СЭП, в которой реализуется предлагаемый способ, приведен на фиг. 1, где обозначено:
1 - батарея фотоэлектрическая;
21…2n - аккумуляторные батареи;
3 - регулятор избыточной мощности;
4 - бортовой комплекс управления;
5 - нагрузка СЭП (бортовая аппаратура);
61…6n - устройства контроля степени заряженности АБ;
7 - датчик выходного напряжения СЭП;
VD - диоды;
UБФ - напряжение БФ;
UСЭП - напряжение СЭП;
UАБ - напряжение АБ;
БКС - бортовая кабельная сеть;
Uном - номинальное напряжение СЭП;
Uпор - минимально допустимое напряжение разряда АБ;
QΣ - суммарная глубина разряда n АБ;
Qпop - максимально допустимая глубина разряда АБ;
R - внутреннее сопротивление АБ;
Е - электродвижущая сила АБ;
К1-1…К1-n - устройства коммутации секций БФ;
К2-1…К2-n - устройства коммутации разрядных цепей АБ;
К3-устройство коммутации бортовой аппаратуры (БА).
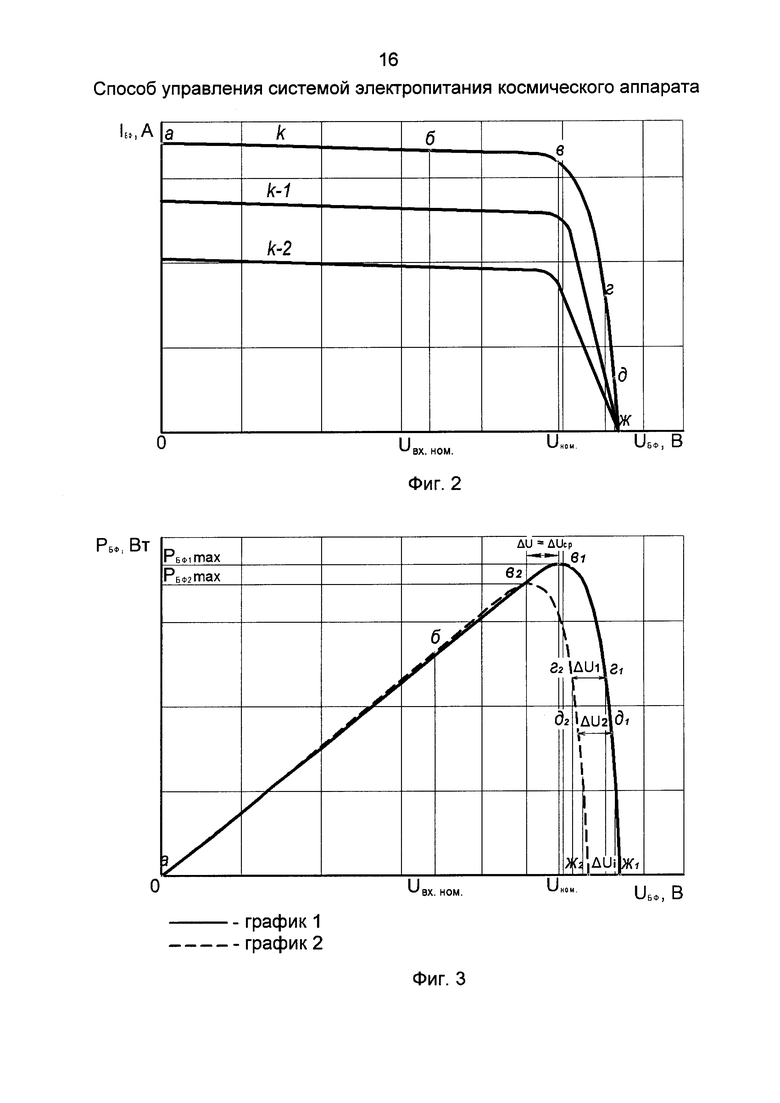
На фиг. 2 показана типовая вольт-амперная характеристика БФ (зависимость входного напряжения (UБФ) от тока (IБФ) БФ. На вольт-амперной характеристике (ВАХ) БФ показаны координаты следующих характерных точек: режим короткого замыкания БФ, когда напряжение БФ равно нулю (точка а); номинальное напряжение в рабочей точке БФ (точка б); оптимальное (экстремальное) напряжение БФ, соответствующее ее максимальной мощности (точка в); напряжения БФ на спадающей части ВАХ, (точки г, д); режим холостого хода БФ или напряжение БФ при нулевом значении тока БФ (точка ж).
Изменение ВАХ при отключении секций БФ характеризуется тем, что ток БФ уменьшается пропорционально количеству закороченных секций. На фиг. 2 показаны три варианта ВАХ: количество функционирующих штатно секций равно k, т.е. ни одна секция не отключена; количество функционирующих штатно секций равно (k-1), т.е. отключена одна секция; количество функционирующих штатно секций равно (k-2), т.е. отключены две секции.
На фиг. 3 приведены типовые зависимости мощности БФ от входного напряжения для двух значений температуры ФП, а именно при температуре примерно 25°С (график 1) и 75°С (график 2). Первый график, как правило, получают при наземных испытаниях БФ, а второй график - при штатной эксплуатации КА на световых участках орбиты КА при ориентации панелей БФ перпендикулярно на Солнце. Данные зависимости имеют нулевое значение мощности БФ в режимах короткого замыкания (точка а) и холостого хода (точка ж), а также максимальное значение мощности БФ (точка в). Из фиг. 3 видно, что при повышении температуры уменьшается максимальное значение мощности и происходит смещение ВАХ БФ в сторону меньших напряжений. Аналогичную закономерность можно наблюдать при деградации параметров ФП во времени.
Как видно из фиг. 3 процессы деградации фотопреобразователей (ФП) не влияют на рабочие характеристики БФ, так как деградация ФП происходит фактически только по напряжению, поэтому в рабочей точке ВАХ БФ она отсутствует, по крайней мере, за время штатного функционирования БФ в составе СЭП КА.
СЭП состоит из БФ 1, которая электрически разделена на m секций, n АБ 21…2n и n РИМ 31…3n. Указанные составные части СЭП соединены между собой параллельно. При этом имеет место равенство m=k⋅n, где n ≥ 1, k ≥ 2. Таким образом, к каждой АБ подключается к секций БФ. На фиг. 1 показана принципиальная схема СЭП, состоящая из двух АБ и 6 секций БФ.
РИМ 31…3n содержат в своем составе группу электронных коммутаторов К1-1…К1-n и силовых коммутаторов К2-1…К2-n. Все секции БФ 1 подключают к АБ 21…2n через диоды VD. При этом каждую АБ через диоды VD подключают к выходной шине СЭП. Для измерения глубины разряда АБ 21…2n применяют счетчики ампер-часов (САЧ) 61…6n, которые конструктивно входят в состав РИМ 3.
В процессе штатного функционирования СЭП АБ 21…2n постоянно циклируют в режиме заряда-разряда, при этом периодически контролируют параметры СЭП, например, ток БФ, выходное напряжение, токи заряда и разряда АБ, текущую электрическую емкость каждой АБ. В БКУ 4 осуществляется суммирование показаний САЧ 61…6n, сравнение QΣ с Qпор, формирование и выдача соответствующей команды управления для отключения части БА 5. Если выходное напряжение СЭП из-за дальнейшего разряда АБ 21…2n, снижается до заданного минимального значения, отключают все АБ от нагрузки. Сброс запоминания управляющего сигнала по отключению всех АБ осуществляют после заряда их до заданного уровня заряженности. Подключение БА к шинам СЭП производят по специальному алгоритму из БКУ 4.
В качестве АРК применяют РИМ 31…3n и элементы коммутации цепей АБ 21…2n. При этом сброс избытка мощности БФ 1 в зависимости от текущих значений параметров СЭП выполняют путем введения/отключения с помощью РИМ 31…3n режима короткого замыкания необходимого количества секций БФ 1. Режим короткого замыкания секций осуществляется с помощью электронных коммутаторов К1-1…К1-n.
Поддержание выходного напряжения СЭП в заданном диапазоне его изменения осуществляют для теневого и светового участков орбиты КА разными способами.
Поддержание выходного напряжения СЭП на теневых участках орбиты КА в требуемом диапазоне изменения выполняют за счет использования в составе СЭП аккумуляторных батарей, имеющих пологую вольт-амперную характеристику, например, литий-ионных аккумуляторных батарей. При этом максимальное значение разрядного тока АБ не должно превышать заданной величины, в противном случае, просадка выходного напряжения СЭП может превышать допустимые пределы. На практике эта задача решается путем выбора оптимального количества параллельно соединяемых АБ.
На световом участке орбиты КА поддержание напряжения СЭП в заданном диапазоне при больших степенях разряженности АБ 21…2n обеспечивают за счет зарядной ВАХ, например, литий-ионных аккумуляторных батарей (ЛИАБ), а при достижении напряжения на выходной шине СЭП максимального значения ограничение напряжения осуществляют за счет уменьшения тока заряда АБ за счет шунтирования части секций БФ 1. Поэтому напряжение СЭП на световом участке регулируется и стабилизируется относительно опорного напряжения, причем это напряжение является верхним пределом для выходного напряжения СЭП. Сигнал, пропорциональный разности между выходным напряжением СЭП и опорным напряжением, равный AU, используют для принудительного изменения и получения необходимого соотношения между мощностью БФ 1, используемой для питания БА 5 и заряда АБ 21…2n, и мощностью БФ 1, рассеиваемой РИМ 31…3n, таким образом, чтобы AU стремился к нулю.
При стабилизации выходного напряжения СЭП на световом участке орбиты в процессе заряда в конечном итоге управляют величиной зарядного тока АБ. Напряжение АБ определяется по формуле:

где Е - э.д.с, IАБ - зарядный ток, R - внутреннее сопротивление АБ соответственно.
Из этой формулы следует, что напряжение АБ, следовательно, выходное напряжение СЭП, может быть изменено за счет изменения зарядного тока АБ.
При превышении напряжения СЭП порогового значения (Uпop) закорачивают с помощью электронных коммутаторов К1-1…К1-n секции БФ. Количество закорачиваемых секций БФ и длительность их закорачивания определяется величиной напряжения СЭП. В этом случае ток БФ при неизменном напряжении БФ уменьшается и, как следствие, уменьшается зарядный ток АБ и ее напряжение. При снижении напряжения АБ до некоторой величины секции БФ подключаются вновь штатно. Из фиг. 2 видно, что режим короткого замыкания БФ не опасен из-за того, что БФ является источником тока с большим внутренним сопротивлением (см. фиг. 1).
Заряд АБ осуществляется за счет разности напряжений СЭП и АБ. В процессе восполнения АБ зарядный ток в начальный момент имеет максимальное значение, так как значение параметра Е пропорционально степени заряженности АБ, затем постепенно по мере увеличения заряженности и росте напряжения АБ зарядный ток уменьшается (падающий ток) и достигает нулевого значения. Таким образом, АБ автоматически отключается от заряда. Параметры СЭП выбираются таким образом, чтобы максимальное выходное напряжение СЭП было близким к максимальному зарядному напряжению АБ.
Необходимо отметить, что выполнение энергобаланса зависит, прежде всего, от правильного выбора параметров БФ, например, количества секций, типа ФП, площади БФ, а также способа ориентации БФ на Солнце. В настоящее время для БФ широко используются арсенид-галлиевые ФП, которые имеют высокие удельные характеристики. Площадь БФ для выбранного типа ФП определяется исходя из величины среднесуточного потребления мощности БФ бортовой аппаратурой по специальной методике (методика выбора площади БФ здесь не рассматривается). Количество секций влияет на точность стабилизации выходного напряжения СЭП, причем, чем больше секций, тем выше точность стабилизации выходного напряжения СЭП.
Количество (n) и тип АБ выбирают исходя из параметров БФ и выполнения энергобаланса СЭП по следующим критериям:
где (IБФ)мах - максимальный ток одной секции БФ, (Iзар)мах=с1⋅Qном.АБ, (Iраз)мах=c2⋅Qном.АБ, c1 и- с2 - коэффициенты, характеризующие нагрузочную способность АБ по токам заряда и разряда соответственно, Оном.АБ - номинальная электрическая емкость одной АБ,
(Iнагр)мах - максимальный ток, потребляемый БА от АБ, k - количество секций БФ, подключенных к одной АБ.
Количество аккумуляторных батарей n выбирается, исходя, прежде всего, из величины допустимого разрядного тока, который определяется, с одной стороны, максимальным током нагрузки, и допустимым диапазоном изменения напряжения АБ в режиме разряда, с другой стороны. При этом допустимый зарядный ток обеспечивается за счет подключения к данной АБ такого количества секций БФ, чтобы суммарный ток секций БФ не превышал максимального зарядного тока АБ. Каждый тип АБ имеет фиксированные значения коэффициентов c1 и с2. Поэтому при выборе АБ по токам заряда и разряда варьируют значением номинальной емкости АБ. Наиболее полно этим требованиям удовлетворяют литий-ионные аккумуляторные батареи. Литий-ионные АБ, выбранные по предложенной выше методике, в силу своих высоких удельных характеристик, имеют существенный запас по емкости, что повышает живучесть СЭП.
Кроме того, высокая надежность и живучесть СЭП обеспечивается за счет сохранения логики защиты АБ от глубокого разряда, предусмотренной в прототипе, а также за счет исключения из состава СЭП сложной электронной аппаратуры зарядно-разрядных устройств. Применение предлагаемого способа управления системой электропитания КА позволит снизить массу СЭП за счет исключения регуляторов заряда и разряда из АРК, а также высоких удельных характеристик ЛИАБ.
Таким образом, применение предлагаемого способа управления позволяет повысить живучесть и надежность функционирования СЭП КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2675590C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2537389C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С БОЛЬШИМ СРОКОМ АКТИВНОГО СУЩЕСТВОВАНИЯ | 2016 |
|
RU2633997C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2593760C9 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ АККУМУЛЯТОРОВ НИКЕЛЬ-ВОДОРОДНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА (ВАРИАНТЫ) | 2014 |
|
RU2586172C2 |
Использование: в области электротехники. Технический результат - повышение живучести и надежности функционирования автономной системы электропитания (СЭП) космических аппаратов (КА). Способ управления системой электропитания КА, содержащей включенные параллельно между собой аппаратуру регулирования и контроля (АРК), секционированную на m частей батарею фотоэлектрическую (БФ), n (n ≥ 1) аккумуляторных батарей (АБ), где m=k⋅n (k ≥ 2), заключается в циклировании АБ в режиме заряда-разряда, контроле параметров СЭП, например выходного напряжения, тока БФ, токов заряда и разряда АБ, текущей электрической емкости каждой АБ; формировании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры (БА) при аварийном разряде АБ до минимального уровня заряженности; отключении всех АБ от нагрузки при снижении выходного напряжения СЭП до заданного минимального значения; включении всех АБ к нагрузке после заряда всех АБ до заданного уровня заряженности. В качестве АРК применяют регулятор избыточной мощности (РИМ) БФ. Сброс избытка мощности БФ в зависимости от текущих значений параметров СЭП выполняют путем введения/отключения с помощью РИМ режима короткого замыкания необходимого количества секций БФ, при этом на теневом участке орбиты КА выходное напряжение СЭП поддерживают в диапазоне изменения, соответствующем диапазону изменения напряжений n АБ, находящихся в режиме разряда; причем в составе СЭП используют АБ с пологими вольтамперными характеристиками, например, литий-ионные АБ. На световом участке орбиты КА осуществляют стабилизацию выходного напряжения СЭП относительно постоянного опорного напряжения, при этом значение опорного напряжения принимают равным максимально допустимому значению выходного напряжения СЭП и близким к максимальному зарядному напряжению АБ. Сигнал, пропорциональный разности между выходным напряжением СЭП и опорным напряжением, равный AU, используют для принудительного изменения и получения необходимого соотношения между мощностью БФ, используемой для питания БА и заряда АБ, и мощностью БФ, рассеиваемой РИМ, таким образом, чтобы AU стремился к нулю; причем аккумуляторные батареи заряжают током, пропорциональным разности напряжений на выходной шине СЭП и данной АБ, при этом количество (n) и тип АБ выбирают исходя из параметров БФ и обеспечения энергобаланса СЭП по критериям: k⋅(IБФ)мах ≤ (Iзар)мах, (Iнагр)мах ≤ n⋅(Iраз)мах, где (IБФ)мах - максимальный ток одной секции БФ, (Iзар)мах = c1⋅Qном.АБ, (Iраз)мах = c2 Qном.АБ, с1 и с2 - коэффициенты, характеризующие нагрузочную способность каждой АБ по токам заряда и разряда соответственно, Qном.АБ - номинальная электрическая емкость одной АБ, (Iнагр)мах - максимальный ток, потребляемый БА от АБ, к - количество секций БФ, подключенных к одной АБ. 3 ил.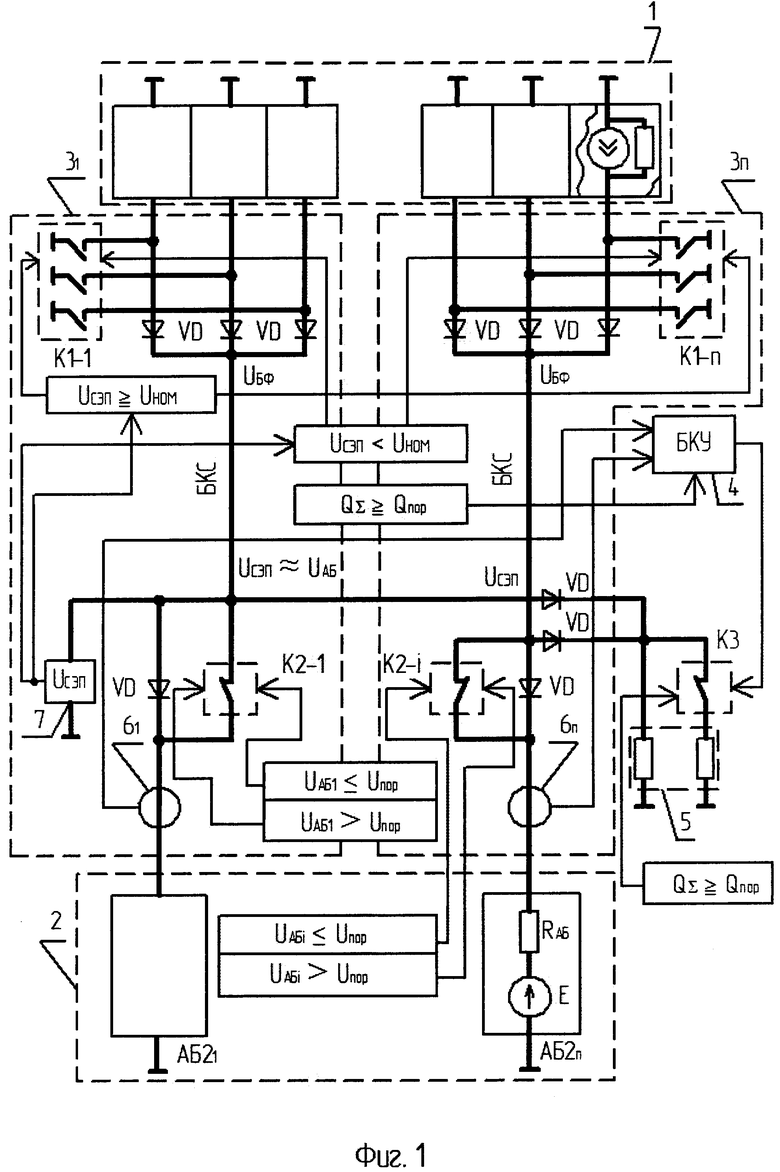
Способ управления системой электропитания (СЭП) космического аппарата (КА), содержащей включенные параллельно между собой аппаратуру регулирования и контроля (АРК), секционированную на m частей батарею фотоэлектрическую (БФ) n (n≥1) аккумуляторных батарей (АБ), где m=k⋅n, (k≥2), заключающийся в том, что АБ циклируют в режиме заряда-разряда, контролируют параметры СЭП, например ток БФ, выходное напряжение, токи заряда и разряда АБ, текущую электрическую емкость каждой АБ; формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры (БА) при аварийном разряде АБ до минимального уровня заряженности; отключают все АБ от нагрузки при снижении выходного напряжения СЭП до заданного минимального значения; включают все АБ к нагрузке после заряда всех АБ до заданного уровня заряженности, отличающийся тем, что в качестве АРК применяют регулятор избыточной мощности (РИМ) БФ; сброс избытка мощности БФ в зависимости от текущих значений параметров СЭП выполняют путем введения/отключения с помощью РИМ режима короткого замыкания необходимого количества секций БФ; при этом на теневом участке орбиты КА выходное напряжение СЭП поддерживают в диапазоне изменения, соответствующем диапазону изменения напряжений n АБ, находящихся в режиме разряда; причем в составе СЭП используют АБ с пологими вольтамперными характеристиками, например, литий-ионные аккумуляторные батареи; на световом участке орбиты КА осуществляют стабилизацию выходного напряжения СЭП относительно постоянного опорного напряжения, при этом значение опорного напряжения принимают равным максимально допустимому значению выходного напряжения СЭП и близким к максимальному зарядному напряжению АБ; сигнал, пропорциональный разности между выходным напряжением СЭП и опорным напряжением, равный ΔU, используют для принудительного изменения и получения необходимого соотношения между мощностью БФ, используемой для питания БА и заряда АБ, и мощностью БФ, рассеиваемой РИМ, таким образом, чтобы ΔU стремился к нулю; причем аккумуляторные батареи заряжают током, пропорциональным разности напряжений на выходной шине СЭП и данной АБ, при этом количество (n) и тип АБ выбирают исходя из параметров БФ и обеспечения энергобаланса СЭП по критериям:
k⋅(IБФ)мах ≤ (Iзар)мах,
(Iнагр)мах ≤ n⋅(Iраз)мах,
где (IБФ)мах - максимальный ток одной секции БФ, (Iзар)мах=с1⋅Qном.АБ, (Iраз)мах=c2⋅Qном.АБ, с1 и⋅с2 - коэффициенты, характеризующие нагрузочную способность каждой АБ по токам заряда и разряда соответственно, Qном.АБ - номинальная электрическая емкость одной АБ, (Iнагр)мах - максимальный ток, потребляемый БА от АБ, k - количество секций БФ, подключенных к одной АБ.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| US 2006132093 A1, 22.06.2006. | |||

