Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующих в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ).
В СЭП осуществляют непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства (ЗУ) обеспечивают заряд АБ, а стабилизатор напряжения (СН) и разрядные устройства (РУ) обеспечивают питание бортовой аппаратуры (БА). В зависимости от степени заряженности АБ производят запрет или разрешение работы ЗУ и РУ.
Ориентацию БФ на Солнце осуществляют двумя способами, а именно:
1) путем изменения углового положения КА вокруг центра масс, обеспечивая при этом условие cosα=1=const, где α - угол между перпендикуляром к поверхности БФ и направлением на Солнце;
2) путем обеспечения ориентации и движения КА в орбитальной системе координат (продольная ось КА постоянно направлена к центру Земли) и выполнения перекладок панелей солнечных батарей (ПСБ) по заданной программе.
В последнем случае КА оснащают приводами, используемыми для выполнения перекладок панелей солнечных батарей (ПСБ) (изменения положения ПСБ относительно координатных осей КА) или только по крену, или по крену и тангажу. В данном случае углы крена и тангажа соответствуют схеме полета, когда ПСБ расположены вдоль вектора движения КА.
В силу различных причин, в том числе из-за прецессии угла β между плоскостью орбиты и направлением на Солнце, генерируемая БФ средняя электрическая мощность (за сутки или за один виток орбиты КА) постоянно изменяется. При этом увеличивается (уменьшается) длительность светового участка орбиты и амплитуда тока БФ, а зависимость освещенности (тока) БФ от времени на световом участке орбиты описывается по закону, близкому к синусоидальному. Минимально необходимая для питания бортовой аппаратуры (БА) средняя электрическая мощность БФ на практике генерируется за счет ориентации и движения КА в орбитальной системе координат и выполнения, при необходимости, перекладок ПСБ по крену или тангажу. Выбирая оптимальное положение БФ в зависимости от угла β, можно обеспечить условие, когда вырабатываемая средняя мощность БФ будет наивысшей по сравнению с мощностями для других возможных положений БФ. Параметры БФ, а именно площадь ПСБ, масса, срок эксплуатации и т.д. выбираются для расчетного случая, β=0, как наиболее тяжелого режима функционирования СЭП с точки зрения соблюдения энергобаланса.
Известен способ управления автономной системой электропитания КА (Патент РФ на изобретение №2168828, МПК 9 H02J 7/36), заключающийся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности данной аккумуляторной батареи; запрете работы всех разрядных устройств и прекращении управления разрядными устройствами при аварийном разряде аккумуляторных батарей в случае потери ориентации БФ на Солнце; снятии запрета работы всех разрядных устройств и возобновлении управления разрядными устройствами по сигналам об уровне заряженности при заряде аккумуляторных батарей до некоторого значения емкости.
Данный способ позволяет сохранять работоспособность СЭП при нештатных или аварийных ситуациях на КА. Однако он недостаточно эффективен, так как не использует всех возможностей СЭП и КА в целом для прекращения или сдерживания процесса развития аварийной ситуации; не обеспечивает надежного функционирования аппаратуры СЭП при выходе из аварийной ситуации после восстановления ориентации БФ
Известен способ управления автономной системой электропитания космического аппарата (патент РФ на изобретение №2467449, МПК6 H02J 7/36 - прототип), содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; после восстановления ориентации батареи фотоэлектрической на Солнце производят питание оставшейся включенной части бортовой нагрузки от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей или по внешней разовой команде.
Этот способ эффективнее аналога с точки зрения исключения катастрофического развития аварийной ситуации, связанной с нарушением энергобаланса. Однако он позволяет, как и аналог, только парировать аварийную ситуацию, но не устраняет причину ее возникновения.
Вероятность возникновения режима нарушения энергобаланса особенно высока в диапазоне изменения угла β от «минус» 30° до «плюс» 30°, поскольку в этом случае длительность теневого участка максимальна. Как известно /Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г.Самара, 2011 г./, количество АБ для СЭП КА выбирают с учетом запасаемой БФ и потребляемой БА электрической энергии, а также исходя из допустимых значений токов заряда и разряда каждой АБ. При штатном режиме работы СЭП энергия, вырабатываемая БФ, полностью (или практически полностью) используется на каждом витке орбиты КА для питания БА, заряда АБ и компенсации электрических потерь в ЗУ, АБ, бортовой кабельной сети и т.д.
Выход из строя одной АБ или одного ЗУ (РУ), при прочих равных условиях, может стать причиной аварийной ситуации в СЭП, построенной на принципе ограничения максимального тока заряда АБ. Действительно при этом ток разряда каждой АБ увеличивается при неизменной суммарной глубине разряда, а полное восполнение работоспособных (n-1) АБ не происходит из-за уменьшения потребления, равном величине тока заряда отказавшей АБ, то энергобаланс нарушается и начинается поступательный разряд аккумуляторных батарей. Аналогичная ситуация может возникать, если по какой-либо причине для обеспечения требуемого среднего за сутки значения cosα нельзя выполнить на каждом витке перекладки ПСБ по тангажу, например, по причине недостаточности ресурса привода ПСБ.
Задачей предлагаемого изобретения является создание способа управления автономной системой электропитания КА, позволяющего сдерживать процесс возникновения аварийной ситуации из-за нарушения энергобаланса путем создания и поддержания режима максимального отбора мощности БФ и парировать аварийную ситуацию в случае ее возникновения.
Указанная задача решается тем, что в способе управления системой электропитания космического аппарата, содержащей фотоэлектрическую солнечную батарею с приводами панелей и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающемся в управлении панелями солнечной батареи, стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от освещенности солнечной батареи, входного и выходного напряжения системы; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности данной аккумуляторной батареи; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности данной аккумуляторной батареи; контроле выходного напряжения системы с помощью порогового датчика; формировании управляющего сигнала в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры при аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности и запоминании его; при аварийном разряде всех n аккумуляторных батарей до минимального уровня заряженности снятии запрета на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы электропитания снижается до заданного порогового значения, запрещении работы всех разрядных устройств и прекращении управления разрядными устройствами по сигналам об уровне заряженности; обеспечении после восстановления ориентации фотоэлектрической батареи на Солнце питания оставшейся включенной части бортовой аппаратуры от батареи фотоэлектрической через стабилизатор напряжения; сбросе запоминания управляющего сигнала после заряда всех аккумуляторных батарей, что одну из двух панелей солнечной батареи поворачивают с нейтрального положения по тангажу по ходу часовой стрелки, другую панель таким же образом поворачивают против хода часовой стрелки или наоборот соответственно на углы φ1, φ2, образованные продольными осями космического аппарата и передней и задней панелей солнечных батарей, при этом освещаемые плоскости панелей солнечной батареи после перекладок панелей образуют тупой угол, равный (180°+φ1+φ2); о наличии режима максимального отбора мощности фотоэлектрической батареи судят по закону изменения входного напряжения от времени на световом участке орбиты космического аппарата, при этом данную схему перекладок панелей используют для относительно малых углов β между плоскостью орбиты и направлением на Солнце, например, в диапазоне его изменения от «минус» 30° до «плюс» 30°, а допустимые углы перекладок панелей φ1доп и φ2доп определяют из условия:
φ1доп≤φ1опт=arccos(R3/(R3+Н1)),
φ2доп≤φ2опт=arccos(R3/(R3+Н2)),
где φ1опт - оптимальный угол перекладки, при котором обеспечивается режим максимального отбора мощности передней панели;
φ2опт - оптимальный угол перекладки, при котором обеспечивается режим максимального отбора мощности задней панели;
R3 - радиус Земли;
H1 - высота орбиты КА в точке выхода его из теневого участка;
Н2 - высота орбиты КА в точке входа его в теневой участок.
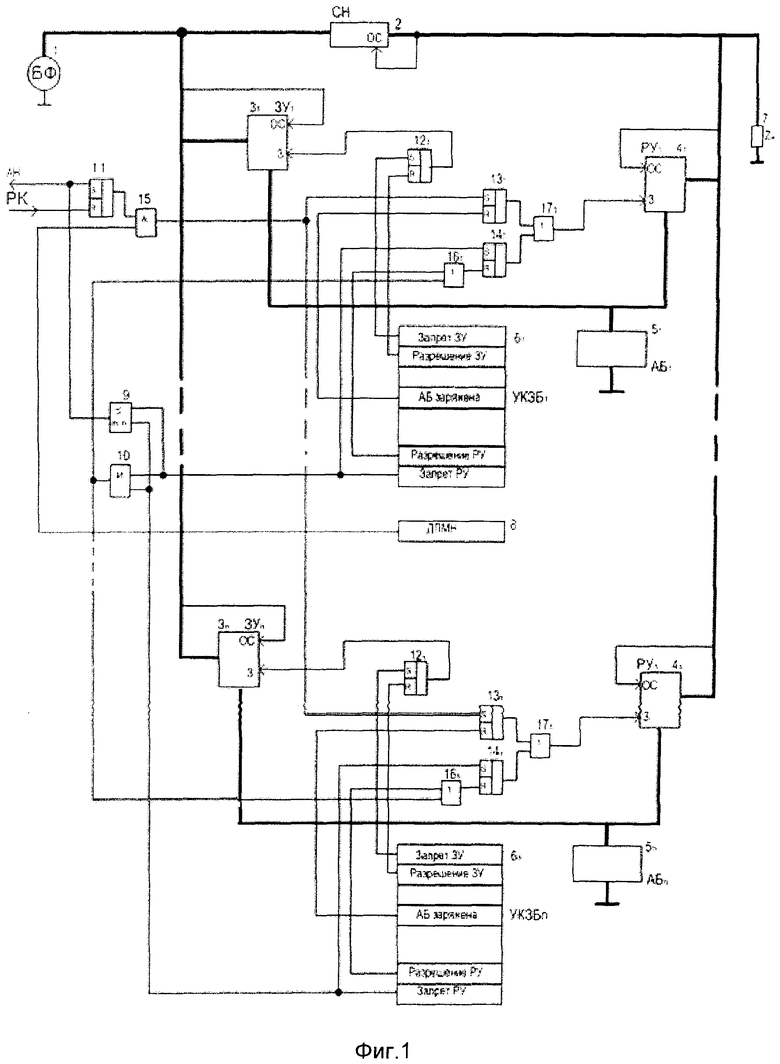
Пример функциональной схемы СЭП, в которой реализуется предлагаемый способ, приведен на фиг.1, где обозначено:
1 - батарея фотоэлектрическая (БФ);
2 - стабилизатор напряжения (СН);
31…3n - зарядные устройства (ЗУ);
41…4n - разрядные устройства (РУ);
51…5n - аккумуляторные батареи (АБ);
61…6n - устройства контроля степени заряженности АБ (УКЗАБ);
ОС - вход обратной связи;
3 - вход запрета работы;
7 - нагрузка СЭП (бортовая аппаратура);
8 - пороговый датчик минимального напряжения;
9 - логический элемент m из n;
10 - логический элемент И;
11, 121…12n, 131…13n, 141…14n - R-S-триггеры;
15 - логический элемент И;
161…16n, 171…17n - логические элементы ИЛИ.
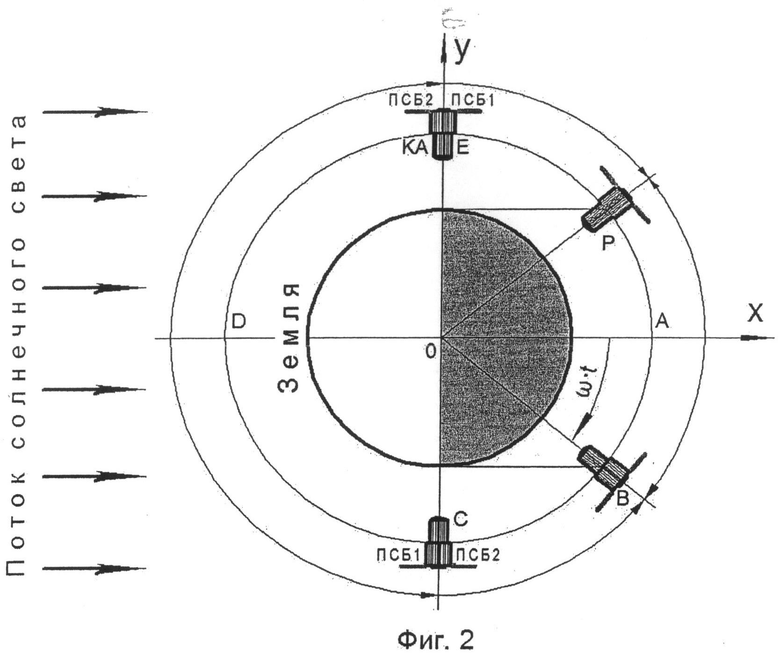
На фиг.2 показана упрощенная схема полета КА по круговой орбите. При этом принято без существенной погрешности, что световой поток от Солнца к Земле распространяется параллельными лучами. Для случая когда угол β между плоскостью орбиты и направлением на Солнце равен нулю, в плоскости орбиты в течение половины периода (Т) обращения вокруг Земли на высоте Н=0 КА освещается солнечным светом. При этом если панели солнечной батареи установлены перпендикулярно продольной оси КА, а угол крена равен нулю, то при движении КА в орбитальной системе координат панели солнечных батарей (ПСБ) также освещаются в течение половины периода Т (участок орбиты C-D-E). С увеличением высоты орбиты КА (при тех же условиях) продолжительность светового участка КА увеличивается пропорционально Н и будет превышать 0,5·Т, но продолжительность освещения панелей солнечной батареи остается неизменной и равной 0,5·Т (участок орбиты B-C-D-E-P).
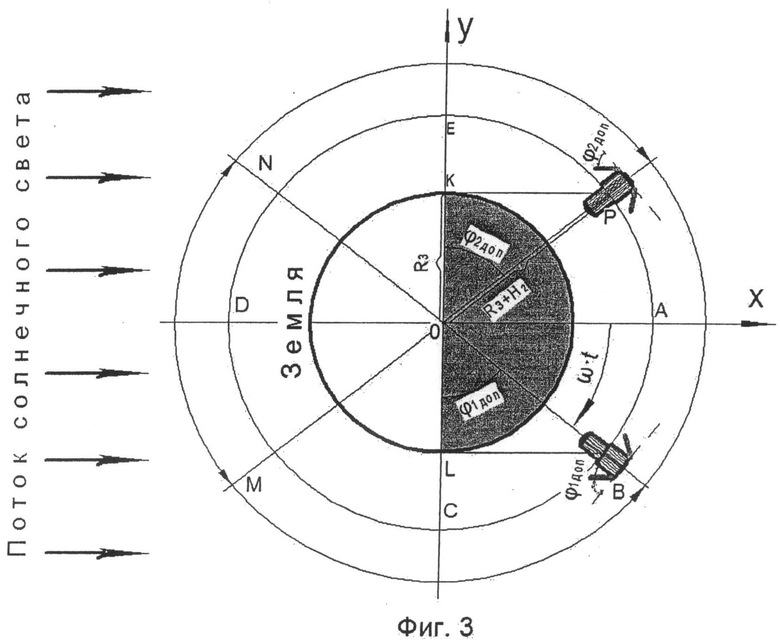
На фиг.3 показана расчетная схема для определения величины дополнительного углового перемещения (2ψ) КА на световом участке орбиты. Для круговой орбиты, используя расчетную схему, получим:
ψ=arccos(R3/(R3+Н)),
где Н - высота орбиты КА;
Rз - радиус Земли.
Для высоты орбиты КА, равной 750 км (низкоорбитальный КА), находим, что 2·ψ=64°.
В случае эллиптической орбиты значение Н в точках выхода КА из тени и входа в тень будут отличаться.
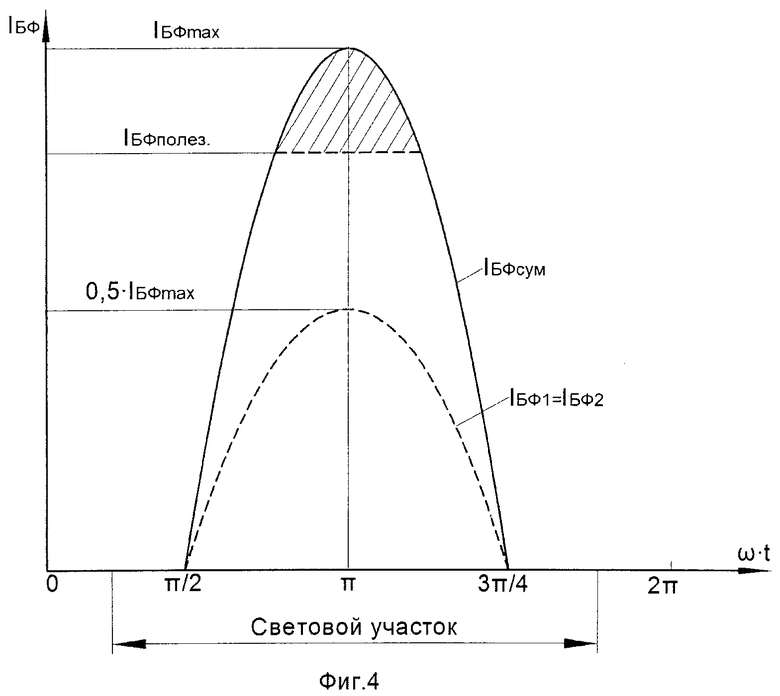
На фиг.4 приведен график изменения тока (мощности) БФ от времени t для круговой орбиты КА при φ1опт=φ2опт=0. Начало координат соответствует моменту времени нахождения КА в точке О, разделяющей теневой участок на две равные части. Для удобства вместо времени t взят угол 

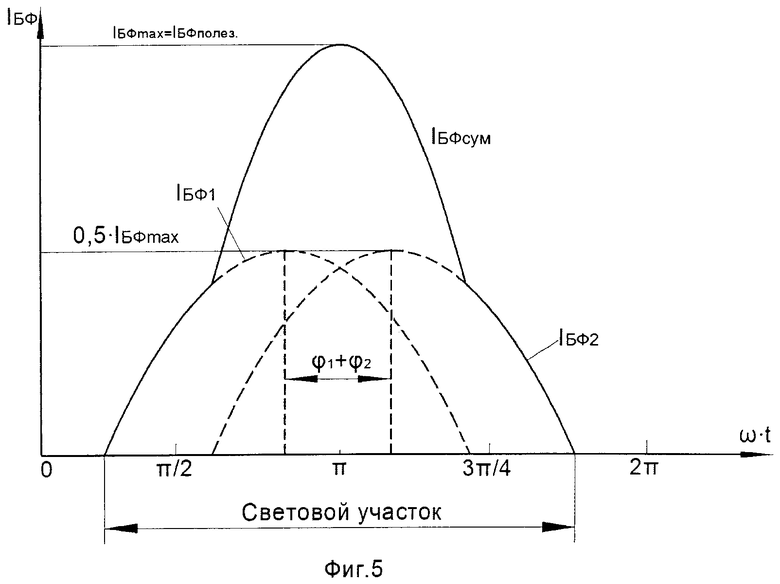
На фиг.5 приведен график изменения тока (мощности) БФ от времени t (угла γ) для круговой орбиты КА при φ1опт≤φ1доп; φ2опт≤φ2доп.
Способ управления автономной системой электропитания космического аппарата осуществляют следующим образом (см. фиг.1).
В СЭП производится непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами, а также панелями солнечных батарей в зависимости от освещенности БФ, входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства обеспечивают заряд АБ, а СН и РУ обеспечивают питание БА. Цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ, а цепи непрерывного управления (ОС) СН и РУ подключены к выходной шине СЭП (на вход БА).
В зависимости от степени заряженности АБ производится запрет или разрешение работы ЗУ и РУ. При достижении максимальной степени заряженности конкретной АБ сигнал с выхода "Запрет ЗУ" ее устройства контроля степени заряженности АБ (61…6n на фиг.1), с помощью R-S- триггера (121…12n) запрещает работу ее ЗУ. После разряда АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение ЗУ" УКЗБ.
При достижении минимального уровня заряженности конкретной АБ сигнал с выхода "Запрет РУ" ее УКЗАБ (61…6n) на чертеже, проходя через R-S триггер (141…14n) и логический элемент ИЛИ (171…17n), поступает на вход запрета работы соответствующего РУ. Эта АБ переводится в режим хранения. После заряда данной АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение РУ" УКЗБ (логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n).
В случае нештатной ориентации солнечных батарей КА на Солнце происходит нарушение энергобаланса в СЭП. Сигналы с выходов "Запрет РУ" всех УКЗБ поступают на входы логических элементов 9 (m из n) и 10 (логический элемент И).
При аварийном разряде нескольких m(m≤n) аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 9 формируется управляющий сигнал аварийной нагрузки (АН), который выдается в бортовой комплекс управления для отключения части бортовой аппаратуры. Этот сигнал запоминается на R-S-триггере 11. Запоминание снимается по внешней разовой команде (РК). При отключении БКУ части БА снижается скорость расходования энергии аккумуляторных батарей. Остается подключенной часть бортовой нагрузки - приборы системы терморегулирования, систем телеметрии и других необходимых систем. Эти приборы обеспечивают температурные режимы и контроль параметров БА. Появляется возможность более длительное время питать нагрузку и продолжать работы по выводу КА из нештатной ситуации. Таким образом, обеспечивается возможность использования средств бортового комплекса управления для адаптивного изменения схемы питания бортовой аппаратуры в зависимости от текущего состояния энергетических возможностей СЭП.
При аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 10 появляется сигнал, который проходя через логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n снимает запрет на работу всех разрядных устройств. Далее, если аварийная ситуация продолжается, происходит синхронный разряд на оставшуюся часть нагрузки всех АБ. Имеющаяся емкость АБ используется полностью.
При дальнейшем аварийном разряде выходное напряжение системы снижается до заданного порогового значения, срабатывает пороговый датчик минимального напряжения 8, а поскольку этому предшествовало запоминание управляющего сигнала АН на R-S-триггере 11, то его сигнал пройдя через логический элемент И 15 и R-S-триггеры (131…13n) и логические элементы ИЛИ {171…17n,) запрещает работу всех разрядных устройств и логическим уровнем на входах элементов ИЛИ {171…17n) блокирует прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ 61…6n. Запоминание управляющего сигнала АН обеспечивает защиту от обесточивания БА при ложном срабатывании порогового датчика минимального напряжения 8 или при его срабатывании в случае перегрузки по выходным шинам СЭП, не связанной с нарушением ориентации БФ и аварийным разрядом АБ.
После восстановления ориентации БФ на Солнце производят питание оставшейся включенной части БА от БФ через стабилизатор напряжения. Напряжение на выходе СЭП, обеспечиваемое СН, определяется соотношением мощности нагрузки, подключенной к выходным шинам СЭП, и мощности, генерируемой БФ и определяемой степенью ее освещенности. Напряжение БФ и, следовательно, напряжение бортовой аппаратуры может произвольно меняться в течение неопределенного времени, до полного восстановления ориентации, в пределах от 0 до номинального значения. Включенные приборы, естественно, при этом должны сохранять свою работоспособность. Избыток мощности БФ идет на заряд АБ.
Поскольку цепи непрерывного управления (вход обратной связи - ОС) ЗУ подключены к шине БФ, а цепи непрерывного управления (ОС) СН подключены к выходной шине СЭП, в первую очередь будет обеспечиваться питание БА, то есть включенные приборы системы терморегулирования, систем телеметрии и других необходимых систем, которые обеспечат необходимые температурные режимы зарядных устройств и аккумуляторных батарей, а также контроль параметров. При нарушении ориентации БФ на Солнце или уходе КА в тень питание всей БА и заряд АБ прекращается. Разряд АБ не производится, так как сигнал «Запрет заряда» не снят.
При заряде какой-либо из аккумуляторных батарей до некоторого значения емкости сигнал с выхода УКЗБ «АБ заряжена», пройдя через R-S-триггер (131…13n) и логический элемент ИЛИ (171…17n,) снимает запрет на работу своего разрядного устройства и блокировку прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗБ 61…6n. СЭП переходит в штатный режим работы после заряда всех АБ или по РК.
Предлагаемый способ управления системой электропитания КА позволит максимально использовать запасенную емкость АБ и обеспечить питание бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, а также не допустить необратимого разряда АБ, в случае нарушения энергобаланса.
Создание способа управления автономной системой электропитания КА, позволяющего сдерживать процесс возникновения аварийной ситуации из-за нарушения энергобаланса, достигается путем выбора оптимального с точки зрения отбора мощности БФ для питания БА (см. фиг.2, 3, 4, 5) режима функционирования СЭП. С целью выполнения этой задачи одну из двух панелей солнечной батареи поворачивают с нейтрального положения по тангажу по ходу часовой стрелки (против хода часовой стрелки) на угол φ1, образованный продольными осями космического аппарата и передней панели; другую панель таким же образом поворачивают против хода часовой стрелки (по ходу часовой стрелки) на угол φ2, образованный продольными осями космического аппарата и задней панели; причем освещаемые плоскости панелей солнечной батареи после перекладок панелей образуют тупой угол, равный (180°+φ1+φ2). Суммарная энергия, вырабатываемая БФ за виток, сохраняется, если углы φ1 и φ2 не превышают допустимых значений, но при этом увеличивается время генерирования мощности, а максимальное значение тока (мощности) БФ уменьшается до значения, когда мощность БФ полностью расходуется на: питание БА, заряд АБ и компенсацию электрических потерь. За счет отбора мощности БФ в полном объеме путем увеличения времени генерирования энергии и уменьшения максимального значения тока (мощности) БФ аккумуляторные батареи в количестве (n-1) штук, имеющие ограничение максимального тока заряда, будут восполняться штатно, обеспечивая необходимый энергобаланс.
Контроль выполнения условия максимального отбора мощности БФ осуществляют, анализируя закон изменения входного напряжения, т.е. напряжения БФ. Если напряжение БФ на световом участке остается неизменным и равным напряжению БФ в рабочей точке, то это означает, что вырабатываемая БФ энергия полностью используется потребителем. На фиг.5 показан режим функционирования БФ после перекладки панелей солнечных батарей (на чертеже не показано) в соответствии с предлагаемым способом управления автономной СЭП КА, откуда видно, что ток нагрузки всегда больше или равен току БФ, следовательно, выходное напряжение на световом участке орбиты КА не изменяется и равняется напряжению БФ в рабочей точке. Эта закономерность полностью соответствует принципу действия СН и РУ системы электропитания современных КА /Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г.Самара, 2011 г./.
Данную схему перекладок панелей целесообразно использовать для относительно малых углов β между плоскостью орбиты и направлением на Солнце, например, в диапазоне его изменения от «минус» 30° до «плюс» 30°. Это связано с тем, что в данном диапазоне изменения углов β продолжительность теневого участка наибольшая, а управление ПСБ по крену еще не оказывает существенного влияния на обеспечение энергобаланса.
Допустимые углы перекладок панелей φ1доп и φ2доп определяют аналитически в зависимости от высоты полета КА в точках выхода КА (точка В) из теневого участка и входа КА (точка Р) в теневой участок по соотношениям:
φ1доп≤φ1опт=arccos(R3/(R3+H1)),
φ2доп≤φ2опт=arccos(R3/(R3+H2)).
В этом случае каждая ПСБ освещается солнечным светом в течение времени, равным 0,5·Т; суммарная генерируемая энергия остается неизменной и наибольшей; максимальный ток (мощность) БФ, равный сумме токов двух ПСБ, из-за появления сдвига их максимумов на угол γ=φ1+φ2, уменьшается, а продолжительность генерирования БФ электрической энергии увеличивается от Т/2 до длительности светового участка орбиты КА (см. фиг.4, 5). Следовательно, можно путем ступенчатого изменения углов φ1 и φ2 добиться режима максимального отбора мощности БФ, когда вся вырабатываемая БФ мощность используется для питания БА, и создать условия для штатного функционирования СЭП.
Таким образом, применение предлагаемого способа управления автономной системой электропитания космического аппарата позволит сдерживать процесс возникновения и развития аварийной ситуации из-за нарушения энергобаланса, а в случае ее возникновения успешно парировать, сохраняя живучесть и работоспособность, как СЭП, в частности, так и КА в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2682725C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2593760C9 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2675590C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С БОЛЬШИМ СРОКОМ АКТИВНОГО СУЩЕСТВОВАНИЯ | 2016 |
|
RU2633997C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| Способ управления автономной системой электроснабжения космического аппарата | 2018 |
|
RU2706762C1 |
Изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующих в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ). Техническим результатом изобретения является сдерживание процесса возникновения аварийной ситуации из-за нарушения энергобаланса. Это достигается тем, что одну из двух панелей солнечной батареи поворачивают с нейтрального положения по тангажу по ходу часовой стрелки, другую панель таким же образом поворачивают против хода часовой стрелки или наоборот соответственно на углы φ1, φ2, образованные продольными осями космического аппарата и передней и задней панелей солнечных батарей, при этом освещаемые плоскости панелей солнечной батареи после перекладок панелей образуют тупой угол, равный (180°+φ1+φ2); о наличии режима максимального отбора мощности фотоэлектрической батареи судят по закону изменения входного напряжения от времени на световом участке орбиты космического аппарата, при этом данную схему перекладок панелей используют для относительно малых углов β между плоскостью орбиты и направлением на Солнце, например, в диапазоне его изменения от «минус» 30° до «плюс» 30°, а допустимые углы перекладок панелей φ1доп и φ2доп определяют из условия:
φ1доп≤φ1опт=arccos(R3/(R3+H1)),
φ2доп≤φ2опт=arccos(R3/(R3+H2)),
где φ1опт - оптимальный угол перекладки, при котором обеспечивается режим максимального отбора мощности передней панели; φ2опт - оптимальный угол перекладки, при котором обеспечивается режим максимального отбора мощности задней панели; R3 - радиус Земли; Н1 - высота орбиты КА в точке выхода его из теневого участка; Н2 - высота орбиты КА в точке входа его в теневой участок. 5 ил.
Способ управления системой электропитания космического аппарата (КА), содержащей фотоэлектрическую солнечную батарею с приводами для ее панелей и n аккумуляторных батарей, стабилизатор напряжения, включенный между фотоэлектрической солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами, а также панелями солнечных батарей в зависимости от освещенности солнечной батареи, входного и выходного напряжения системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности данной аккумуляторной батареи; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы с помощью порогового датчика; формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры при аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности и запоминают его; при аварийном разряде всех n аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы электропитания снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; обеспечивают после восстановления ориентации фотоэлектрической батареи на Солнце питание оставшейся включенной части бортовой аппаратуры от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей, отличающийся тем, что одну из двух панелей солнечной батареи поворачивают с нейтрального положения по тангажу по ходу часовой стрелки, другую панель таким же образом поворачивают против хода часовой стрелки или наоборот соответственно на углы φ1,
φ2, образованные продольными осями космического аппарата и передней и задней панелей солнечных батарей, при этом освещаемые плоскости панелей солнечной батареи после перекладок панелей образуют тупой угол, равный (180°+φ1+φ2); о наличии режима максимального отбора мощности фотоэлектрической батареи судят по закону изменения входного напряжения от времени на световом участке орбиты космического аппарата, при этом данную схему перекладок панелей используют для относительно малых углов β между плоскостью орбиты и направлением на Солнце, например, в диапазоне его изменения от «минус» 30° до «плюс» 30°, а допустимые углы перекладок панелей φ1доп и φ2доп определяют из условия:
φ1доп≤φ1опт=arccos(R3/(R3+H1)),
φ2доп≤φ2опт=arccos(R3/(R3+H2)),
где φ1опт - оптимальный угол перекладки, при котором обеспечивается режим максимального отбора мощности передней панели;
φ2опт - оптимальный угол перекладки, при котором обеспечивается режим максимального отбора мощности задней панели;
R3 - радиус Земли;
H1 - высота орбиты КА в точке выхода его из теневого участка;
Н2 - высота орбиты КА в точке входа его в теневой участок.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ РАЗДЕЛЕНИЯ 1-НАФТИЛАМИН-8 СУЛЬФОКИСЛОТЫ И N-ФЕНИЛНАФТИЛАМИН-8 СУЛЬФОКИСЛОТЫ | 1934 |
|
SU43001A1 |
| КОСМИЧЕСКИЙ АППАРАТ | 1999 |
|
RU2164881C1 |
| КОСМИЧЕСКИЙ АППАРАТ | 1999 |
|
RU2156211C1 |
| US20060132093 A1, 22.06.2006 | |||
| GB1349079 A, 27.03.1974 | |||

