Изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА) с большим сроком активного существования, в которых батареи фотоэлектрические используются в качестве первичных источников энергии, а аккумуляторные батареи (АБ) - в качестве накопителей энергии.
В последние годы никель-водородные аккумуляторные батареи интенсивно вытесняются литий-ионными аккумуляторными батареями (ЛИАБ), обладающими, кроме большого ресурса непрерывного функционирования, высокими удельными энергетическими характеристиками.
Несмотря на то, что в настоящее время на практике широко используются оригинальные способы эксплуатации различного типа аккумуляторных батарей, направленные на увеличение их ресурса, задача повышения живучести и надежности СЭП в целом продолжает оставаться весьма актуальной, особенно для космических аппаратов, срок активного существования которых составляет более пяти лет.
Известен способ управления системой электропитания космического аппарата (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г., разд. 8, аналог), содержащей фотоэлектрическую батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между фотоэлектрической батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности (или напряжения) данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности (напряжения) данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких аккумуляторных батарей до минимального уровня заряженности или снижении выходного напряжения ниже порогового значения формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры.
Недостатком аналога является то, что в нем не решена задача, связанная с восстановлением работоспособности СЭП, в случае полного разряда ее аккумуляторных батарей по причине нарушения энергобаланса, например, из-за нештатного функционирования бортовой вычислительной системы или системы управления движением КА. В конечном итоге этот недостаток существенно снижает живучесть космического аппарата.
Известен способ управления автономной системой электропитания космического аппарата (патент РФ на изобретение №2467449, прототип), содержащей фотоэлектрическую батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между фотоэлектрической батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы снижается до заданного порогового значения, запрещают работу всех разрядных устройств и прекращают управление разрядными устройствами по сигналам об уровне заряженности; после восстановления ориентации батареи фотоэлектрической на Солнце производят питание оставшейся включенной части бортовой нагрузки от батареи фотоэлектрической через стабилизатор напряжения; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей или по внешней разовой команде.
В прототипе для оценки состояния АБ и формирования по ним соответствующих управляющих сигналов используют такой ее параметр, как уровень заряженности, мерой которого является текущая (электрическая) емкость. Текущую емкость определяют косвенно, а именно по величине возникающего в аккумуляторах давления газообразного водорода. Принимают, что емкость аккумулятора, измеряемая в ампер-часах, изменяется пропорционально изменению давления его газовой среды. Такой способ определения уровня заряженности АБ, с одной стороны, следует отнести к числу достоинств прототипа, так как при этом не требуется создания сложной и дорогостоящей измерительной аппаратуры. Для КА, срок активного существования которых не превышает 5 лет, применение прототипа безусловно технически оправдано. Однако у данного способа имеется существенный недостаток, связанный с тем, что точность управления СЭП со временем начинает ухудшаться, причиной чего является постепенное возрастание остаточного давления газовой среды (молекулярного водорода) в аккумуляторах. Действительно, масса газообразного водорода, не участвующая в химической реакции токообразования, в силу деградации технических характеристик электродов АБ постепенно увеличивается. Чем больше срок активного существования КА, тем больше величина остаточного (балластного) давления, а значит больше погрешность определения фактической емкости НВАБ, так как АБ отключается от заряда по неизменному пороговому давлению газовой среды в аккумуляторе, а измеренная емкость остается неизменной. Следовательно, разница между фактической и измеряемой емкостями, при прочих равных условиях, постоянно увеличивается. Кроме того, появляется дополнительная погрешность, связанная с тем, что остаточные давления в различных аккумуляторах конкретной НВАБ могут существенно отличаться друг от друга (B.C. Багоцкий, A.M. Скундин. Химические источники тока, М., Энергоиздат, 1981 г.).
В случае замены НВАБ на современные и перспективные типы АБ, например, на ЛИАБ, в силу существенных отличий принципов их действия, данный способ управления системой электропитания может быть использован на практике только частично, а уровень заряженности АБ нельзя определить в принципе. При этом не исключаются изменения в худшую сторону таких показателей СЭП как вероятность возникновения аварийных ситуаций, живучесть и надежность функционирования СЭП (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение, Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011 г., разд. 8.4).
Задачей предлагаемого изобретения является создание способа управления, позволяющего уменьшить вероятность возникновения аварийных ситуаций, существенно повысить надежность и живучесть систем электропитания, в которых в качестве вторичных источников питания используются, например, ЛИАБ или АБ иного типа.
Указанная задача решается тем, что в способе управления системой электропитания космического аппарата (КА) с большим сроком активного существования, содержащей фотоэлектрическую батарею и n аккумуляторных батарей (АБ), стабилизатор напряжения, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений СЭП; контролируют степень заряженности АБ; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; контролируют выходное напряжение с помощью порогового датчика; при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих АБ до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение СЭП снижается до заданного порогового значения, запрещают работу всех разрядных устройств; после восстановления ориентации батареи фотоэлектрической (БФ) на Солнце производят питание оставшейся включенной части бортовой нагрузки от БФ; сброс запоминания управляющего сигнала производят после заряда всех АБ или по внешней разовой команде, в качестве параметра для оценки состояния аккумуляторных батарей выбирают напряжение аккумулятора или группы включенных между собой параллельно аккумуляторов; для управления режимами функционирования АБ формируют соответствующие управляющие сигналы, отличающиеся между собой по величине порогового напряжения аккумулятора или группы аккумуляторов; при этом для защиты АБ от перезаряда и переразряда задействуют не менее трех таких управляющих сигналов для каждой АБ; отключение АБ от заряда выполняют ступенчато; при заряде одного из аккумуляторов или группы аккумуляторов до максимального порогового напряжения ограничивают ток заряда с максимального до заданного уровня, а при повторном достижении порогового напряжения на любом из аккумуляторов или любой группе аккумуляторов и сформировании первого управляющего сигнала вводят запрет заряда данной АБ; причем второй и третий управляющие сигналы, соответствующие промежуточному и минимальному пороговым напряжениям аккумулятора или группы аккумуляторов, используют для защиты АБ от переразряда; при этом отключение аккумуляторной батареи от разряда производят по второму управляющему сигналу, а переход на режим ограничения разряда всех АБ осуществляют по третьему управляющему сигналу; при превышении температуры в какой-либо АБ максимально допустимого уровня вводят запрет на работу соответствующего зарядного устройства и снимают этот запрет при снижении температуры до заданного уровня; вводят запрет на работу соответствующего зарядного устройства при снижении температуры в какой-либо АБ до минимально допустимого уровня и снимают этот запрет при повышении температуры до заданного уровня; контроль глубины разряда каждой АБ осуществляют с помощью счетчиков ампер-часов (САЧ), включенных в разрядно-зарядные цепи каждой из n АБ; при этом показания САЧ со всех n АБ суммируют и определяют интегральную глубину разряда; в случае достижения интегральной глубины разряда пороговых значений формируют соответствующие команды управления для изменения режима функционирования КА.
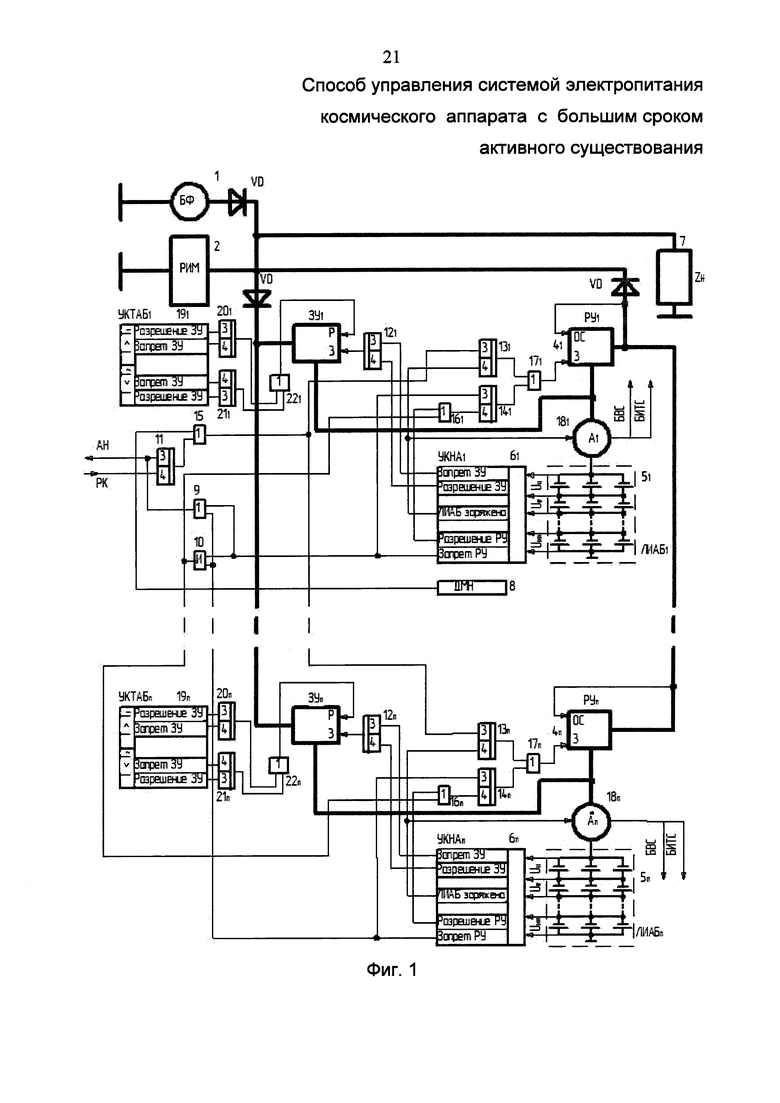
Пример функциональной схемы СЭП на базе литий-ионных аккумуляторных батарей, в которой реализуется предлагаемый способ, приведен на фиг. 1, где обозначено:
1 - батарея фотоэлектрическая;
2 - стабилизатор напряжения (регулятор избытка мощности (РИМ));
31…3n - зарядные устройства (ЗУ);
41…4n - разрядные устройства (РУ);
51…5n – литий-ионные аккумуляторные батареи;
61…6n - устройства контроля напряжения аккумуляторов АБ (УКНА);
ОС - вход обратной связи; 3 - вход запрета работы; Р - вход разрешения работы;
7 - нагрузка СЭП (бортовая аппаратура);
8 - датчик (пороговый) минимального напряжения;
9 - логический элемент m из n;
10 - логический элемент И;
11, 121…12n, 131…13n, 141…14n, 201…20n, 211….21n - R-S триггеры;
15 - логический элемент И;
161…16n, 171…17n 221…22n - логические элементы ИЛИ;
181…18n - счетчик ампер-часов (САЧ);
191…19n - устройство контроля температуры АБ (УКТАБ);
БВС - бортовая вычислительная система;
БИТС - бортовая измерительная телеметрическая система;
VD - диоды, Zн - эквивалентное сопротивление нагрузки.
Блочный состав и конфигурация системы электропитания космического аппарата практически не имеют принципиального значения для осуществления предлагаемого способа управления.
Блок-схема СЭП (на фиг. 1), выполненная, например, путем параллельного включения БФ 1 и АБ 51…5n на общую шину с БА 7, имеющей эквивалентное сопротивление Zн, отличается малыми потерями преобразования солнечной энергии в электрическую энергию.
Для стабилизации входного и выходного напряжений на световом участке орбиты КА используют регулятор избытка мощности (РИМ) 2, а для стабилизации выходного напряжения на теневых участках орбиты применяют разрядные устройства (РУ) 41…4n. Монтаж литий-ионных аккумуляторных батарей выполняют путем параллельно-последовательного соединения закрепленных на едином металлическом основании отдельных аккумуляторов. Аккумуляторы, включенные между собой параллельно, образуют группу аккумуляторов с общим напряжением Unm, где n - номер ЛИАБ в составе СЭП, m - номер последовательно соединенных аккумуляторов в n-ом ЛИАБ. Вместо группы аккумуляторов может быть использован один аккумулятор. Диоды VD выполняют функцию защиты схемы.
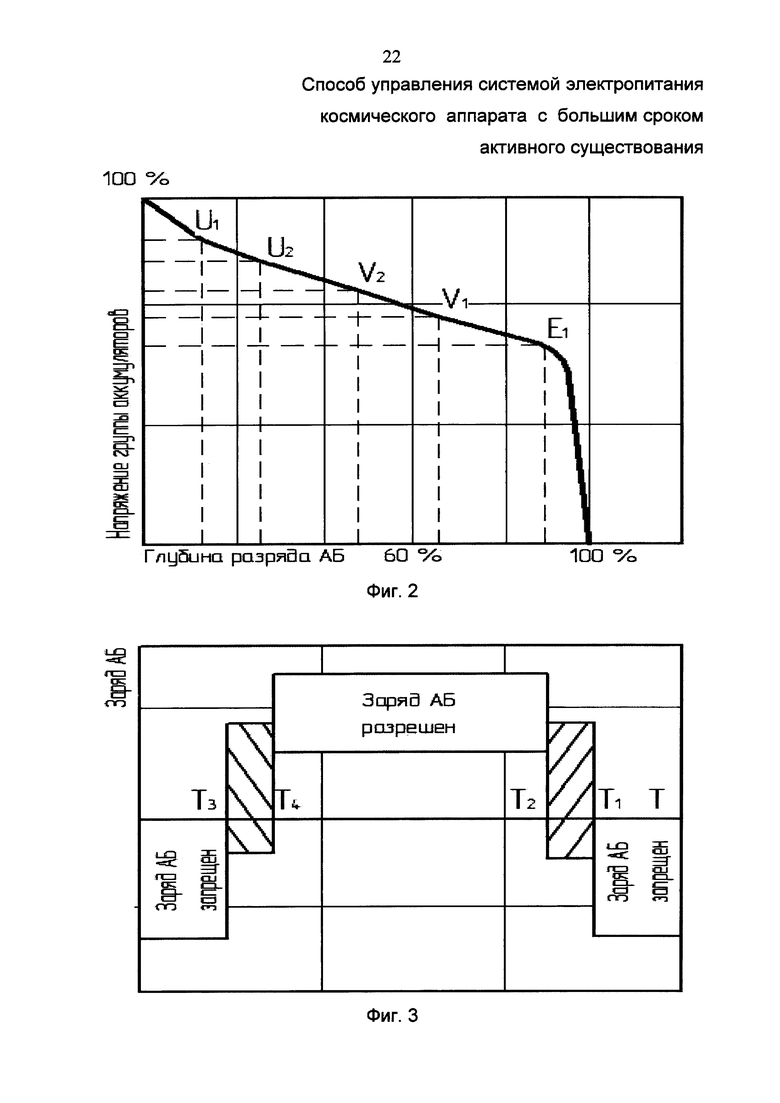
На фиг. 2 показана типовая зависимость напряжения группы литий-ионных аккумуляторов от глубины их разряда. Для других типов АБ предлагаемое техническое решение также приемлемо. Пороговые напряжения группы аккумуляторов, выбранные в предлагаемом способе в качестве основных параметров для управления режимами функционирования АБ, выгодно отличаются от других аналогичных параметров (уровень заряженности, напряжение АБ и т.д.), поскольку они стабильны и однозначно зависят от уровня заряженности аккумуляторов. Для этой цели могут быть применены пороговые напряжения АБ, но в этом случае возможны негативные последствия. Например, при выходе из строя одной группы аккумуляторов и отключении ее из контура управления, полное напряжение АБ, при прочих равных условиях, существенно уменьшается (в случае использования ЛИАБ приблизительно на 4 В) и по этой причине запрет заряда данной АБ будет вводиться с задержкой, а запрет разряда будет вводиться преждевременно. Это обстоятельство вызовет появление значительных погрешностей и будет препятствовать обеспечению необходимой точности управления СЭП.
Для изменения режимов функционирования АБ используют, как минимум, три управляющих сигнала, отличающихся друг от друга пороговыми значениями напряжения группы аккумуляторов. Первый управляющий сигнал (УС1) формируют при достижении на двух группах аккумуляторов напряжения U1 и снимают при снижении напряжения этих групп аккумуляторов до U2. Численное значение напряжения U1 для литий-ионных аккумуляторов составляет примерно 4 В. Второй управляющий сигнал (УС2) формируют при снижении напряжения любой группы аккумуляторов до V1 и снимают при повышении напряжения группы аккумуляторов до V2. Численное значение напряжения V1 для ЛИАБ составляет (3,5÷3,6) В. Третий управляющий сигнал (УС3) формируют при дальнейшем снижении напряжения любой группы аккумуляторов до E1 с одновременным переводом всех АБ в режим запрета разряда. Численное значение напряжения Е1 для ЛИАБ - не ниже 3 В.
На фиг. 3 изображена циклограмма отключения (включения) АБ от заряда в зависимости от температуры. При температуре АБ Т≥T1 для данной АБ вводят запрет заряда, а при температуре АБ Т3≤Т≤Т2 запрет заряда снимают, при температуре АБ Т≤Т3 для данной АБ вводят запрет заряда, а при температуре АБ Т2≥Т≥Т4 запрет заряда снимают. Для ЛИАБ следующие пороговые значения температуры Т: Т1≈50°C, Т2≈45°C, Т3≈-5°C, Т4≈0°C.
Функционирование СЭП КА происходит следующим образом (фиг. 1). Системой электропитания производится непрерывное управление зарядными и разрядными устройствами, а также панелями батареи фотоэлектрической (при необходимости) в зависимости от освещенности БФ, входного и выходного напряжений СЭП. При этом зарядные устройства обеспечивают заряд АБ 51…5n, а БФ 1 и РУ 41…4n обеспечивают питание БА 7. Цепи непрерывного управления (обратной связи - ОС) РУ 41…4n подключены к выходной шине СЭП (на вход БА 7). На световых участках орбиты КА используют регулятор избытка мощности (РИМ) 2. Принципы его устройства и действия достаточно известны и здесь они не рассматриваются.
В зависимости от величины напряжения группы аккумуляторов ЛИАБ Unm производят запрет или разрешение работы ЗУ и РУ. При достижении первого (максимального) порогового напряжения любой группы аккумуляторов данной АБ U1 (фиг. 2) ток заряда АБ сначала уменьшают с максимального до заданной величины, а при повторном достижении этого напряжения на аккумуляторе сигнал (УС1) с выхода "Запрет ЗУ" ее устройства контроля напряжения аккумуляторов (61…6n на фиг. 1), с помощью R-S триггера (121…12n) запрещает работу ее ЗУ. После снижения напряжения группы аккумуляторов (в процессе разряда) до некоторого заданного уровня U2 (фиг. 2) этот запрет снимают сигналом с выхода «Разрешение ЗУ» УКНА 61…6n. Схема ступенчатого заряда ЛИАБ не требует сложного управления, так как при уменьшении тока заряда напряжение группы аккумуляторов снижается из-за уменьшения падения напряжения на внутреннем сопротивлении аккумуляторов и запрет заряда наступает с задержкой по времени, достаточной для восполнения ЛИАБ до максимального уровня заряженности
При глубоком разряде и снижении напряжения на любой группе аккумуляторов до промежуточного уровня V1 (фиг. 2) конкретной АБ сигнал (УС2) с выхода "Запрет РУ" ее УКНА (61…6n на чертеже), проходя через R-S триггер (141…14n) и логический элемент ИЛИ (171…17n) поступает на вход запрета работы соответствующего РУ. Эту АБ переводят в режим хранения. После заряда данной АБ до некоторого заданного уровня напряжения группы аккумуляторов V2 (фиг. 2) этот запрет снимают сигналом с выхода "Разрешение РУ" УКНА (логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n).
В случае нештатной ориентации солнечных батарей КА на Солнце возможно нарушение энергобаланса СЭП. Сигналы с выходов "Запрет РУ" всех УКНА поступают на входы логических элементов 9 (m из n) и 10 (логический элемент И). При аварийном разряде хотя бы по одной группе аккумуляторов нескольких m (m≤n) АБ до промежуточного уровня напряжения на выходе логического элемента 9 формируется управляющий сигнал аварийной нагрузки («АН»), который выдается в бортовой комплекс управления для отключения части БА. Этот сигнал запоминается на R-S триггере 11. Запоминание может быть снято по внешней разовой команде (РК). При отключении БКУ части БА снижается скорость расходования энергии АБ. Остается подключенной часть БА - приборы систем терморегулирования, телеметрии и других необходимых систем. Эти приборы обеспечивают температурные режимы и контроль параметров БА 7.
При дальнейшем аварийном разряде и снижении напряжения хотя бы на одной группе аккумуляторов любой из n работающих АБ 51…5n до минимального уровня Е1 на выходе логического элемента 10 появляется сигнал (УС3), который проходя через логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n вводит запрет на работу всех разрядных устройств.
В случае продолжения аварийного разряда ЛИАБ, когда выходное напряжение системы электропитания снижается до заданного порогового значения, срабатывает датчик (пороговый) минимального напряжения 8, а поскольку этому предшествовало запоминание управляющего сигнала «АН» на R-S триггере 11, то его сигнал пройдя через логический элемент И 15 и R-S триггеры (131…13n) и логические элементы ИЛИ (171…17n) также запрещает работу всех разрядных устройств и логическим уровнем на входах элементов ИЛИ (171…17n) блокирует прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне напряжения группы аккумуляторов от УКНА 61…6n. Запоминание управляющего сигнала «АН» обеспечивает защиту от обесточивания БА 7 при ложном срабатывании датчика порогового минимального напряжения 8, или при его срабатывании в случае перегрузки по выходным шинам СЭП, не связанной с нарушением ориентации БФ 1 и аварийным разрядом АБ.
После восстановления ориентации БФ 1 на Солнце производят питание оставшейся включенной части БА 7 от БФ 1. Напряжение на выходе СЭП, обеспечиваемое БФ, определяется соотношением мощности нагрузки 7, подключенной к выходным шинам СЭП, и мощности, генерируемой БФ 1 и определяемой степенью ее освещенности. Напряжение БФ 1 и, следовательно, напряжение БА 7 может произвольно меняться в течение неопределенного времени, до полного восстановления ориентации, в пределах от 0 до номинального значения. Включенные приборы, естественно, при этом должны сохранять свою работоспособность. Избыток мощности БФ 1 идет на заряд АБ 51…5n.
СЭП выполнена таким образом, что в первую очередь будет обеспечиваться питание БА 7, то есть включенные приборы системы терморегулирования, систем телеметрии, и других необходимых систем. При нарушении ориентации БФ 1 на Солнце или уходе КА в тень питание всей БА 7 и заряд АБ 51…5n прекращается. Разряд АБ 51…5n не производится, так как сигнал «Запрет заряда» не снят.
При заряде какой-либо из аккумуляторных батарей 51…5n до некоторого значения емкости (или повышения напряжения любой группы аккумуляторов до напряжения U2) сигнал с выхода УКНА «АБ заряжена», пройдя через R-S триггер (131…13n) и логический элемент ИЛИ (171…17n) снимает запрет на работу своего разрядного устройства и блокировку прохождения управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКНА 61…6n. СЭП переходит в штатный режим работы после заряда всех АБ 51-5n или по РК.
Счетчики ампер-часов 181…18n встраивают в соответствующие силовые цепи АБ 51…5n (фиг. 1) и используют для измерения глубины разряда аккумуляторов каждой АБ, причем при восполнении данной АБ глубина ее разряда должна быть равна нулю. Это обстоятельство позволяет легко корректировать (обнулять) накопленную погрешность САЧ 181…18n принудительно в случае применения данного способа управления СЭП, а именно по сигналу УС1, поступающему в данный прибор от УКНА 61…6n после восполнения соответствующей АБ.
Счетчики ампер-часов 181…18n используют не только для измерения текущей емкости каждой АБ 51…5n в отдельности, а также для ранней защиты СЭП от глубокого разряда всех АБ. С этой целью показания всех САЧ 181…18n постоянно суммируют в бортовой вычислительной машине (БВС) и в случае достижения пороговых значений формируют команды управления (управляющие сигналы) для изменения режимов работы КА, например, для отключения части БА 7 или перехода его на режим постоянной ориентации БФ 1 на Солнце. Следует особо подчеркнуть, что количество АБ для СЭП КА выбирается, как правило, исходя из величины допустимого тока разряда, а также необходимого запаса суммарной емкости. Так как ЛИАБ имеют высокие удельные характеристики по запасаемой энергии, то в случае использования их в составе СЭП, суммарная емкость, как правило, значительно превышает требуемые запасы, следовательно, критерием для выбора количества АБ будет только допустимый ток разряда АБ.
В каждом ЗУ 31…3n устанавливают устройства контроля температуры АБ (УКТАБ 191…19n). В зависимости от величины температуры АБ производят запрет или разрешение работы ЗУ. При превышении температуры АБ максимального значения Т1 (фиг. 3) сигнал с выхода "Запрет ЗУ" ее устройства контроля температуры АБ (191…19n на фиг. 1), с помощью R-S триггера (201…20n) и логического элемента (221…22n) запрещает работу ее ЗУ. После снижения температуры АБ до некоторого заданного уровня Т2 (фиг. 3) этот запрет снимают сигналом с выхода «Разрешение ЗУ» УКТАБ 191…19n. Снижение температуры АБ происходит за счет исключения режима заряда АБ.
Аналогично при снижении температуры АБ ниже допустимого значения Т3 (фиг. 3) сигнал с выхода "Запрет ЗУ" ее устройства контроля температуры АБ (191…19n на фиг. 1), с помощью R-S триггера (211…21n) и логического элемента (221…22n) запрещает работу ее ЗУ. После повышения температуры АБ до некоторого заданного уровня Т4 (фиг. 3) этот запрет снимают сигналом с выхода «Разрешение ЗУ» УКТАБ 191…19n. Повышение температуры АБ происходит за счет функционирования АБ в режиме разряда или от действия внешнего источника тепла, например, термоплаты АБ (на фиг. 1 термоплаты АБ не показаны).
Выбор в качестве основных параметров для управления режимами функционирования АБ пороговых напряжений группы аккумуляторов позволяет иметь стабильный и надежный инструмент регулирования СЭП, поскольку напряжение любого аккумулятора, однозначно связанное с уровнем его заряженности по определенному закону, не подвержено деградации и влиянию внешних факторов. Следовательно, точность управления системой электропитания в процессе длительной штатной эксплуатации КА практически не претерпевает изменений.
Пороговые значения суммарной глубины разряда, формируемые с помощью САЧ 181…18n, выбирают таким образом, чтобы оставшаяся емкость ЛИАБ была достаточна для обеспечения штатного функционирования КА в течение промежутка времени, необходимого для принятия экстренных мер по сдерживанию или прекращению аварийного разряда АБ 51…5n. Эта форма защиты СЭП является предупредительной и осуществляется на раннем этапе аварийного разряда АБ.
Запреты заряда, вводимые при повышенных или пониженных температурах АБ 51…5n с помощью вырабатываемых УКТАБ 191…19n пороговых сигналов, достаточно эффективны, поскольку предотвращают аварийные ситуации, связанные с возможным выходом из строя отдельных аккумуляторов АБ, повышая тем самым живучесть и надежность СЭП.
Использование для введения запрета разряда всех АБ управляющего сигнала УС3, формируемого УКНА 61…6n при снижении напряжения любой группы аккумуляторов до минимального порогового значения Е1, существенно повышает живучесть и надежность СЭП, так как эта операция осуществляется в области безопасных уровней глубины разряда, когда полностью исключается возможность переполюсовки аккумуляторов, представляющей для ЛИАБ катастрофические необратимые последствия.
Предлагаемая схема управления системой электропитания предусматривает возможность проведения периодической коррекции (обнуление накопленной погрешности) отдельно для каждого САЧ по факту восполнения соответствующей АБ. Это обстоятельство не только исключает накопление больших ошибок определения текущей емкости АБ, но и повышает надежность функционирования системы электропитания в целом за счет поддержания точностных характеристик СЭП на заданном уровне.
Схема двухступенчатого заряда АБ способствует повышению ее живучести. Действительно, принудительное уменьшение тока заряда АБ до пороговой величины позволяет в соответствии с законом Ома для полной цепи уменьшить напряжение АБ. При этом отключение АБ от заряда из-за того, что напряжение любой группы аккумуляторов становится ниже порогового значения, будет происходить при большем уровне ее заряженности, что приведет к повышению запасаемой АБ энергии, следовательно, к повышению живучести СЭП.
Таким образом, применение предлагаемого способа управления системой электропитания КА позволяет уменьшить вероятность возникновения аварийной ситуации из-за нарушения энергобаланса, существенно повысить надежность и живучесть СЭП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2682725C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2593760C9 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| Способ управления автономной системой электропитания космического аппарата | 2016 |
|
RU2624447C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2675590C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2537389C1 |
Использование: в области электротехники. Технический результат - повышение надежности и живучести систем электропитания и уменьшение вероятности возникновения аварийных ситуаций. Согласно способу управления системой электропитания космического аппарата (КА), содержащей фотоэлектрическую батарею, и n АБ, стабилизатор напряжения, и по n зарядных и разрядных устройств, управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений СЭП; контролируют степень заряженности АБ; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; контролируют выходное напряжение с помощью порогового датчика. При аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих АБ до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение СЭП снижается до заданного порогового значения, запрещают работу всех разрядных устройств; после восстановления ориентации батареи фотоэлектрической (БФ) на Солнце производят питание оставшейся включенной части бортовой нагрузки от БФ; сброс запоминания управляющего сигнала производят после заряда всех АБ или по внешней разовой команде, в качестве параметра для оценки состояния аккумуляторных батарей выбирают напряжение аккумулятора или группы включенных между собой параллельно аккумуляторов; для управления режимами функционирования АБ формируют соответствующие управляющие сигналы, отличающиеся между собой по величине порогового напряжения аккумулятора или группы аккумуляторов; отключение АБ от заряда выполняют ступенчато; введение и снятие запрета на работу соответствующего зарядного устройства осуществляют соответственно при превышении температуры в какой-либо АБ максимально допустимого уровня и снимают при снижении температуры до заданного уровня; введение и снятие запрета на работу соответствующего зарядного устройства осуществляют в зависимости от температуры АБ; контроль глубины разряда каждой АБ осуществляют с помощью счетчиков ампер-часов (САЧ), включенных в разрядно-зарядные цепи каждой из n АБ; при этом показания САЧ со всех n АБ суммируют и определяют интегральную глубину разряда; в случае достижения интегральной глубины разряда пороговых значений формируют соответствующие команды управления для изменения режима функционирования КА. 3 ил.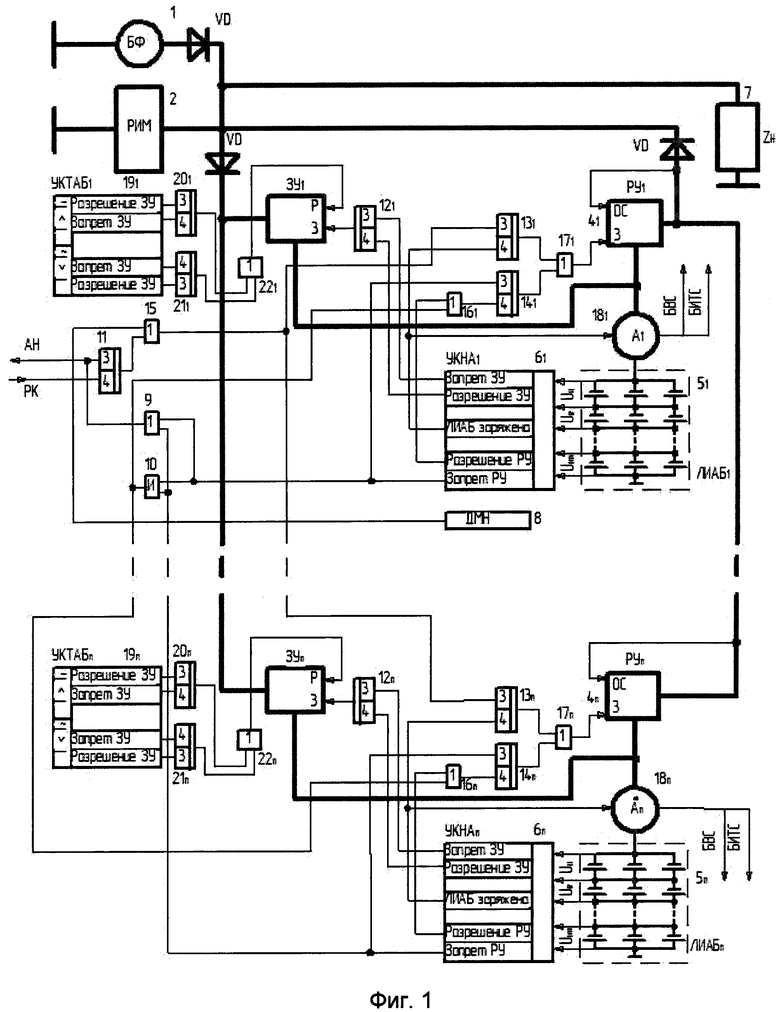
Способ управления системой электропитания (СЭП) космического аппарата (КА) с большим сроком активного существования, содержащей фотоэлектрическую батарею, и n аккумуляторных батарей (АБ), стабилизатор напряжения, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений СЭП; контролируют степень заряженности АБ; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; контролируют выходное напряжение с помощью порогового датчика; при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления КА для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих АБ до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение СЭП снижается до заданного порогового значения, запрещают работу всех разрядных устройств; после восстановления ориентации батареи фотоэлектрической (БФ) на Солнце производят питание оставшейся включенной части бортовой нагрузки от БФ; сброс запоминания управляющего сигнала производят после заряда всех АБ или по внешней разовой команде, отличающийся тем, что в качестве параметра для оценки состояния аккумуляторных батарей выбирают напряжение аккумулятора или группы включенных между собой параллельно аккумуляторов; для управления режимами функционирования АБ формируют соответствующие управляющие сигналы, отличающиеся между собой по величине порогового напряжения аккумулятора или группы аккумуляторов; при этом для защиты АБ от перезаряда и переразряда задействуют не менее трех таких управляющих сигналов для каждой АБ; отключение АБ от заряда выполняют ступенчато; при заряде одного из аккумуляторов или группы аккумуляторов до максимального порогового напряжения ограничивают ток заряда с максимального до заданного уровня, а при повторном достижении порогового напряжения на любом из аккумуляторов или любой группе аккумуляторов и сформировании первого управляющего сигнала вводят запрет заряда данной АБ; причем второй и третий управляющие сигналы, соответствующие промежуточному и минимальному пороговым напряжениям аккумулятора или группы аккумуляторов, используют для защиты АБ от переразряда; при этом отключение аккумуляторной батареи от разряда производят по второму управляющему сигналу, а переход на режим ограничения разряда всех АБ осуществляют по третьему управляющему сигналу; при превышении температуры в какой-либо АБ максимально допустимого уровня вводят запрет на работу соответствующего зарядного устройства и снимают этот запрет при снижении температуры до заданного уровня; вводят запрет на работу соответствующего зарядного устройства при снижении температуры в какой-либо АБ до минимально допустимого уровня и снимают этот запрет при повышении температуры до заданного уровня; контроль глубины разряда каждой АБ осуществляют с помощью счетчиков ампер-часов (САЧ), включенных в разрядно-зарядные цепи каждой из n АБ; при этом показания САЧ со всех n АБ суммируют и определяют интегральную глубину разряда; в случае достижения интегральной глубины разряда пороговых значений формируют соответствующие команды управления для изменения режима функционирования КА.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2535301C2 |
| US 2006132093 A1, 22.06.2006. | |||

