Изобретение относится к области радиолокации и может быть использовано в бортовых РСА при селекции движущихся наземных целей (СДНЦ).
Современные РСА позволяют получать радиолокационное изображение земной поверхности и расположенных на ней объектов (целей) с высоким разрешением по азимуту и дальности, которое близко по качеству к фотоснимкам, в любое время года и суток, независимо от уровня освещенности, метеорологических условий и на больших дальностях в реальном масштабе времени, а также осуществлять селекцию движущихся целей (СДЦ) на фоне отражений от земной поверхности и измерять их радиальные скорости [см., например, Сазонов Н.А., Щербинин В.Н. Многочастотный способ селекции движущихся целей в РСА. - Радиотехника, 1995, №11, стр.6-8].
Известен способ определения движущихся наземных целей с помощью РСА [Патент РФ №2084920 от 20.07.97 / Сазонов Н.А., Щербинин В.Н.], заключающийся в формировании трех синтезированных апертур на разной несущей частоте зондирующих импульсов, каждую из которых формируют со своим интервалом синтезирования. Величина интервала синтезирования рассчитывается исходя из неизменного разрешения по азимуту. Период повторения зондирующих импульсов определяется исходя из условия неизменного количества отсчетов на интервалах синтезирования. Центры этих интервалов синтезирования совмещаются в пространстве, при этом в канале с большей несущей частотой зондирующих импульсов апертуры формируются с задержкой в зависимости от размеров апертур и скорости ЛА. Разрешение по дальности в каждом канале поддерживается постоянным. Разностные сигналы формируются без предварительного сдвига фаз принимаемых сигналов по соответствующим каналам. Определяется радиальная скорость движущейся цели.
Недостатком данного способа является то, что измеряется только радиальная составляющая скорости наземной движущейся цели.
Техническим результатом изобретения является определение полной скорости и направления движения наземной цели с помощью РСА, установленной на ЛА, для обеспечения эффективного наведения других движущихся объектов на обнаруженную ДЦ.
Указанный технический результат достигается тем, что в известном способе определения скорости и направления движения наземной цели с помощью РЛС с синтезированием апертуры антенны, заключающемся в формировании трех синтезированных апертур на различной несущей частоте излучения зондирующих импульсов, каждую из которых формируют со своим интервалом синтезирования, приеме отраженных сигналов раздельно по трем каналам, последующей их обработке, в формировании разностных сигналов без предварительного сдвига фаз принимаемых сигналов по соответствующим каналам и определении радиальной скорости движущейся цели, дополнительно определяют углы наблюдения движущейся цели на земной поверхности θ1 и θ2 в моменты времени t1 и t2, соответствующие центрам первого и второго интервалов синтезирования апертуры антенны, а полную скорость Vп и направление движения наземной цели θп определяют соответственно по формулам
 ,
,
 ,
,
где VR1 и VR2 - векторы радиальных скоростей в моменты времени t1 и t2, соответствующие центрам первого и второго интервалов синтезирования апертуры антенны; θ1 и θ2 - углы наблюдения движущейся цели на земной поверхности.
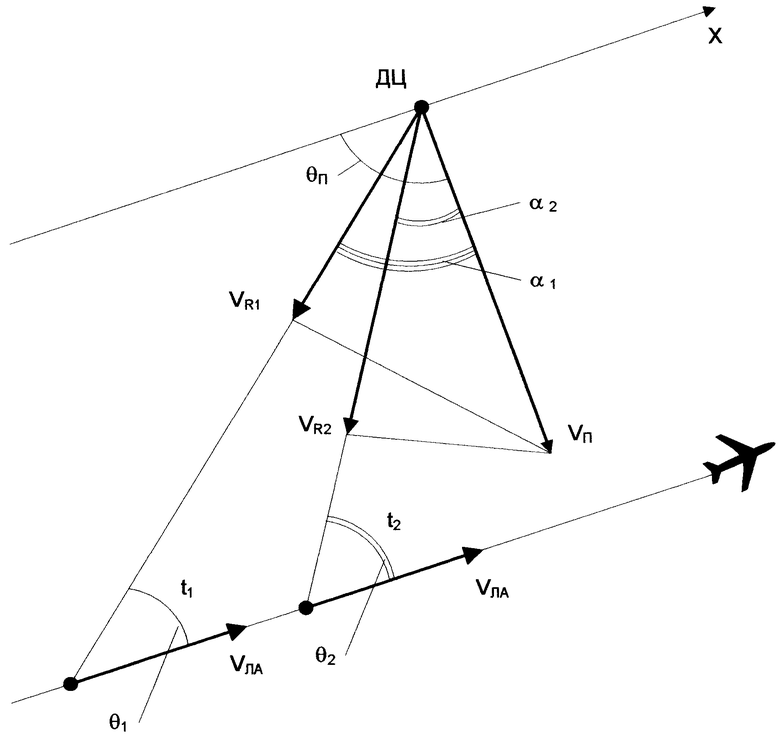
Сущность способа поясняется фигурой, где показана геометрия задачи определения полной скорости и направления движения наземной цели на плоскости. На этой фигуре следующие обозначения: VЛА - вектор скорости ЛА; θп - угол между направлением вектора полной скорости ДЦ VП и отрицательным направлением оси X, параллельной вектору VЛА (определяет направление движения наземной цели); θ1 и θ2 - углы наблюдения ДЦ на земной поверхности; α1 и α2 - углы между направлениями векторов полной скорости и радиальных скоростей VR1 и VR2 в моменты времени t1 и t2 соответствующие центрам первого и второго интервалов синтезирования апертуры антенны.
Как видно из фигуры

VR1=VПcosα1, VR2=VПcosα2.
Следовательно,
 ,
, 
Подставив (2) в (1), получим выражение для определения направления движения наземной цели

Преобразовав (3), используя формулы суммы и разности арккосинусов [Справочник по элементарной математике / М.Я.Выгодский. - М: ACT: Астрель, 2006. стр.443], получаем выражение, которое определяет величину полной скорости

Углы θ1 и θ2 в (3) и (4) могут быть определены в РСА по положению оси диаграммы направленности антенны и смещению ДЦ относительно своего истинного положения, которое обусловлено эффектом Доплера [см., например, Сазонов НА., Щербинин В.Н., Ярушкин М.М. Селекция и определение азимута движущихся наземных целей. - Радиотехника, 2000, №6, стр.30-33].
Полученные соотношения (4) и (3) определяют величину полной скорости и направление движения наземной цели в случае значительного превышения дальности до ДЦ высоты полета ЛА.
Использование предлагаемого способа определения скорости и направления движения наземной цели с помощью РЛС с синтезированием апертуры антенны позволяет достаточно точно определять полную скорость и направление движения наземных целей с помощью трехчастотной РСА для дальнейшего обеспечения с помощью РСА эффективного целеуказания на обнаруженную наземную ДЦ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения скорости и направления движения наземных объектов бортовой радиолокационной станцией с антенной решеткой | 2021 |
|
RU2786678C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В ТРЕХКАНАЛЬНОЙ ЦИФРОВОЙ РСА | 1998 |
|
RU2205423C2 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ | 1994 |
|
RU2084920C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| Способ измерения рельефа поверхности Земли | 2016 |
|
RU2643790C1 |
| Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны | 2016 |
|
RU2614041C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ НА ПОВЕРХНОСТИ ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АЭРОКОСМИЧЕСКОГО БАЗИРОВАНИЯ | 1991 |
|
RU2017168C1 |
Изобретение относится к области радиолокации и может быть использовано в бортовых РСА при селекции движущихся наземных целей (СДНЦ). Достигаемым техническим результатом изобретения является определение полной скорости и направления движения наземной цели с помощью РЛС с синтезированием апертуры антенны (РСА), установленной на летательном аппарате (ЛА), для обеспечения эффективного наведения других движущихся объектов на обнаруженную движущуюся цель (ДЦ). Сущность изобретения состоит в том, что при условии измерения радиальных скоростей ДЦ с помощью РСА и, учитывая, что дальность от ЛА до наземных целей, как правило, значительно больше высоты его полета, дополнительно определяют углы наблюдения ДЦ на земной поверхности в моменты времени t1 и t2, соответствующие центрам первого и второго интервалов синтезирования апертуры антенны, определяют по соответствующим вычислительным формулам полную скорость и направление движения наземной цели. 1 ил.
Способ определения скорости и направления движения наземной цели с помощью РЛС с синтезированием апертуры антенны, заключающийся в формировании трех синтезированных апертур на различной несущей частоте излучения зондирующих импульсов, каждую из которых формируют со своим интервалом синтезирования, приеме отраженных сигналов раздельно по трем каналам, последующей их обработке, в формировании разностных сигналов без предварительного сдвига фаз принимаемых сигналов по соответствующим каналам и определении радиальной скорости движущейся цели, отличающийся тем, что дополнительно определяют углы наблюдения движущейся цели на земной поверхности θ1 и θ2 в моменты времени t1 и t2, соответствующие центрам первого и второго интервалов синтезирования апертуры антенны, а полную скорость VП и направление движения наземной цели θп определяют соответственно по формулам


где VR1 и VR2 - векторы радиальных скоростей в моменты времени t1 и t2, соответствующие центрам первого и второго интервалов синтезирования апертуры антенны; θ1 и θ2 - углы наблюдения движущейся цели на земной поверхности.
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ | 1994 |
|
RU2084920C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2006 |
|
RU2313054C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ НЕСКОЛЬКИХ ОБЪЕКТОВ В МНОГОКАНАЛЬНЫХ ДОПЛЕРОВСКИХ РЛС | 2008 |
|
RU2373551C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| US 5442364 A, 15.08.1995 | |||
| US 6175326 B1, 16.01.2001 | |||
| Схват манипулятора | 1987 |
|
SU1426785A1 |
| WO 2010001035 A2, 07.01.2010. | |||

