Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокаторах с синтезированной апертурой антенны (РСА) с режимом селекции движущихся наземных целей (СДНЦ) на фоне подстилающей поверхности.
Известен способ, обеспечивающий СДНЦ и измерение их радиальных скоростей в трехчастотной РСА (Патент 2084920, МКИ 5 G 01 S 13/52. Способ селекции движущихся наземных целей./ Сазонов Н.А., Щербинин В.Н. Приоритет 26.01.94).
Этот способ СДНЦ отличается тем, что апертуры формируют на разной несущей частоте зондирующих импульсов, каждую апертуру формируют со своим интервалом синтезирования, величину которого рассчитывают исходя из неизменного разрешения по азимуту, период повторения зондирующих импульсов в каждой апертуре определяют исходя из условия неизменного количества отсчетов на интервалах синтезирования, центры этих интервалов синтезирования совмещают в пространстве, при этом в канале с большей несущей частотой зондирующих импульсов апертуры формируют с задержкой в зависимости от размеров апертур и скорости летательного аппарата, разрешение по дальности в каждом канале поддерживают постоянным, разностные сигналы формируют без предварительного сдвига фаз принимаемых сигналов по соответствующим каналам, радиальную скорость определяют по соответствующей формуле (см. Патент 2084920).
Недостатком такого способа СДНЦ является необходимость использования трех передающих и трех приемных устройств, а также применения специальных мер при формировании синтезированных апертур с совмещенными фазовыми центрами.
Наиболее близким к заявляемому способу является способ, обеспечивающий СДНЦ и измерение их радиальных скоростей в трехантенной РЛС, формирующей одновременно три апертуры (Патент США 4825213 от 25 апреля 1989 года).
Сущность этого способа СДНЦ заключается в том, что формируют три синтезированные апертуры при излучении импульсных зондирующих сигналов, принимают отраженные сигналы раздельно по трем каналам, определяют разностные сигналы между сигналами первого и второго, второго и третьего каналов, предварительно изменив фазы сигналов для компенсации различного пространственного положения реальных антенн, определяют сдвиг фаз между разностными сигналами, определяют радиальную скорость движущейся цели и количество отсчетов смещения изображения движущейся цели относительно ее истинного положения. Такая РЛС содержит три антенны, три приемника, три процессора, процессор обработки амплитудного и фазового разбаланса, устройство компенсации движения платформы РЛС, обнаружитель движущихся целей, процессор обработки сигналов движущихся целей, процессор обработки сигналов стационарных целей, дисплей и курсовой процессор.
Недостатком такого способа СДНЦ является недостаточно высокая точность измерения радиальных скоростей движущихся наземных целей из-за необходимости использования трех приемных устройств и невозможности точного учета и компенсации амплитудного и фазового разбаланса.
Техническим результатом предлагаемого способа является повышение точности измерения радиальных скоростей движущихся наземных целей.
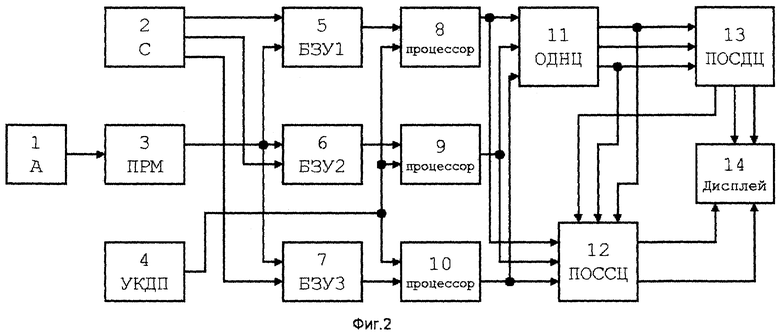
Сущность предлагаемого способа селекции движущихся наземных целей, заключается в том, что формируют три синтезированные апертуры при излучении импульсных зондирующих сигналов, определяют разностные сигналы между сигналами первого и второго, второго и третьего цифровых каналов обработки, соответствующих трем синтезируемым апертурам, определяют сдвиг фаз между разностными сигналами, определяют радиальную скорость движущейся цели и количество отсчетов смещения изображения движущейся цели относительно ее истинного положения, отраженные сигналы принимают одним каналом, синтезированные апертуры формируют путем запоминания и последующей раздельной обработки принятых сигналов в трех каналах цифровой обработки сигналов таким образом, что в первом канале обработке подвергаются сигналы с 1-го по N-й, во втором со 2-го по N+1-й, а в третьем с 3-го по N+2-й, а разностные сигналы определяют предварительно изменив фазы вычитаемых сигналов для компенсации пространственного различия фазовых центров синтезированных апертур. Таким образом, с помощью одной антенны обеспечивается формирование трех синтезированных апертур А1, А2 и A3 (см. фиг.1) со смещенными фазовыми центрами. Отличие заключается лишь в том, что фазовые центры синтезированных апертур оказываются смещенными не на расстояние D, определяемое пространственным разнесением реальных антенн (см. Патент США 4825213), а на расстояние, равное отрезку пути, проходимому одной антенной за период повторения зондирующих импульсов.
Сущность способа поясняется следующими рассуждениями.
Для селекции движущихся целей на фоне земной поверхности необходимо подавлять сигналы от неподвижных объектов и фона местности и выделять сигналы от движущихся целей. При формировании кадров радиолокационного изображения (РЛИ) в цифровой системе обработки методом гармонического анализа (ГА) в РСА со смещенными фазовыми центрами синтезированных апертур это означает, что необходимо обеспечить равенство амплитуд и фаз комплексных сигналов от одних и тех же участков местности и неподвижных объектов в соответствующих отсчетах на выходе процессоров, реализующих синтезирование апертур (включающих операцию быстрого преобразования Фурье), в каждом канале такой РСА. Затем следует найти разностные сигналы между сигналами первого и второго, второго и третьего каналов для компенсации сигналов от фона местности и неподвижных объектов и последующего измерения радиальных скоростей обнаруженных движущихся целей (аналогично, как это делается в прототипе).
Предварительный сдвиг фаз принимаемых сигналов в данном случае определяют исходя из следующих рассуждений.
Сигнал на выходе фазового детектора РСА в центральном канале от элемента разрешения с координатами (0, R0, 0) (в системе координат, связанной с центром интервала синтезирования центрального канала (см. фиг.1)), находящегося в произвольной полоске дальности на расстоянии R0 можно записать в виде:
где
N - количество отчетов сигнала на интервале синтезирования, Тn - период повторения зондирующих импульсов.
Закон изменения фазы этого сигнала [Радиолокационные станции с цифровым синтезированием апертуры антенны. /Под ред. Горяинова В.Т. - М.: Радио и связь, 1988].
где λ - длина волны излучаемых импульсов, Vn - путевая скорость носителя РСА.
Для элемента разрешения с координатами (Xэp, R0, 0) закон изменения фазы cиагнала в центральном канале
В левом и правом каналах, фазовые центры синтезированных апертур которых смещены на один или несколько периодов повторения зондирующих импульсов относительно центрального, закон изменения фазы сигнала от этого элемента разрешения:

где Хсм=VnТn. В общем случае, это смещение может быть равным Хсм=VnKТn, К=1, 2.... После преобразований получим:
На основании того, что опорная функция во всех каналах должна быть настроена на центр кадра, т.е. на точку с координатами (0, R0, 0), можно записать выражения для опорных функций трех каналов:

После перемножения сигналов фазовых детекторов на опорные функции сигналы каналов будут равны:
Эти сигналы часто называют демодулированными траекторными сигналами из-за того, что в них нет частотной модуляции, как в сигналах с выходов фазовых детекторов.
Так как входной сигнал является суперпозицией сигналов от всех элементов разрешения в данной полоске дальности, то и демодулированный сигнал представляет собой сумму сигналов с различной частотой и начальной фазой, соответствующей каждому элементу разрешения.
После преобразования этого демодулированного сигнала методом гармонического анализа, каждая его составляющая попадает в соответствующий отсчет БПФ (доплеровский фильтр), после чего появляется возможность компенсации (взаимного уничтожения) сигналов от одинаковых элементов разрешения, если они неподвижны.
Так как используется один приемный тракт для трех каналов обработки, то амплитуды сигналов от одних и тех же элементов разрешения будут равны, а для равенства фаз этих сигналов необходимо довернуть по фазе сигналы правого канала на угол
для каждого отсчета БПФ для дальнейшей компенсации сигналов от фона и неподвижных целей. При этом Хэр=m•ΔХ, где m - количество отсчетов БПФ относительно центра кадра, ΔХ - линейное разрешение РСА. Для формирования второго разностного сигнала фазу сигнала центрального канала необходимо также довернуть на фазовый угол, определяемый выражением (1).
Разностные сигналы
определяются только сдвигом и амплитудой сигналов от ДЦ и не зависят от фона местности, что позволяет осуществить СДЦ.
Далее, обработка сигналов производится аналогично изложенному способу СДЦ и определения количества отсчетов смещения изображения ДЦ относительно ее истинного положения (см. Прототип). Определив смешение ДЦ относительно своего истинного положения, можно найти ее действительное расположение в кадре РЛИ.
На фиг.2 показана структурная схема РСА, реализующая предложенный способ СДНЦ. Она содержит антенное устройство 1, соединенное со входом приемника 3, процессоров 8, 9, 10, вторые входы которых соединены с выходом устройства компенсации движения платформы РСА 4, а выходы процессоров 8, 9, 10 соединены со входами обнаружителя движущихся наземных целей 11 и со входами процессора обработки сигналов стационарных наземных целей 12, а выходы обнаружителя движущихся наземных целей соединены со входами процессора обработки сигналов движущихся наземных целей 13, два выхода которого соединены с дисплеем и курсовым процессором 14, а третий выход соединен со входом процессора обработки сигналов стационарных целей 12, два других входа которого соединены с выходами обнаружителя движущихся целей 11, а выходы соединены с другими входами дисплея и курсового процессора 14. Устройство содержит также синхронизатор 2, первый выход которого соединен с первым входом первого буферного запоминающего устройства 5, второй выход синхронизатора 2 соединен с первым входом второго буферного запоминающего устройства 6, третий выход синхронизатора 2 соединен с первым входом третьего буферного запоминающего устройства 7, а вторые входы буферных запоминающих устройств 5, 6, 7 соединены с выходом приемника 3, а выходы буферных запоминающих устройств 5, 6, 7 соединены с соответствующими первыми входами процессоров 8, 9, 10.
РЛС работает следующим образом. Отраженные от целей и фона местности сигналы принимаются антенной 1 и поступают на приемник 3. Сигналы с выхода приемника поступают на первые входы буферных запоминающих устройств 5, 6 и 7, где происходит накопление сигналов, которые обрабатываются соответствующими процессорами 8, 9 и 10 методом гармонического анализа для формирования трех синтезированных антенн в пространстве. Формированием апертур управляет синхронизатор 2 таким образом, что в первом канале (БЗУ 5 и процессор 8) накапливаются и обрабатываются отсчеты с первого до N-го, во втором (БЗУ 6 и процессор 9) со второго до N+l-гo, а в третьем (БЗУ 7 и процессор 10) с третьего до N+2-го, поступающие с приемника 3. Выходные сигналы процессоров 8, 9 и 10 поступают на обнаружитель движущихся наземных целей 11 и на процессор обработки сигналов стационарных целей 12. В обнаружителе движущихся целей 11 происходит компенсация сигналов от фона местности для каждого элемента разрешения и выделение сигнала движущейся цели. Для этого вектор выходного комплексного сигнала первого канала необходимо довернуть на угол Δϕ, определяемый выражением (1), для каждого элемента разрешения и найти разность второго и первого каналов. Аналогично можно получить разность между третьим каналом и вторым. В случае движущейся цели разностные сигналы не равны нулю, а определяются только фазовым сдвигом и амплитудой сигнала от движущейся цели. Разностные сигналы подаются с обнаружителя движущихся целей 11 на процессор обработки сигналов движущихся целей 13, где определяется радиальная скорость, положение цели и амплитуда сигнала от цели. В процессоре обработки сигналов стационарных целей 12 сигналы разных каналов складываются для того, чтобы они усиливали друг друга, что позволяет получить высококачественное изображение. Выходной сигнал будет иметь приблизительно в три раза большую амплитуду относительно сигналов в каждом из каналов без необходимости увеличения мощности передатчика. Выходные сигналы процессоров 12 и 13 индицируются на дисплее 14 и могут выдаваться в процессор указания курса цели. Амплитуда сигнала от движущейся цели и номер доплеровского фильтра согласуются с разверткой дисплея и процессором указания курса цели 14, который формирует сигналы соответствия дальности и частоты доплера дисплея.
Вьчислительные устройства, входящие в такую РЛС, могут быть выполнены в виде интегральных частей процессора, или они могут быть самостоятельными, т. е. они не отличаются от тех устройств, которые используются в прототипе (коммерчески доступными являются такие системы, как АР120В или Model PDP 11-34M (см. описание прототипа [United States Patent 4825213, G 01 S 13/52, 25.04.89]).
Процессоры, реализующие синтезирование апертуры, описаны в доступных источниках. Так, процессор, обеспечивающий синтезирование апертуры, описан в [Радиолокационные станции с цифровым синтезированием апертуры антенны. /Под ред. Горяинова В.Т. - М.: Радио и связь, 1988] на стр.210-219. Реализовать синтезирование апертур можно с помощью процессоров, использующихся в прототипе или с помощью отечественной БЦВМ из семейства ЭВМ "Багет", разработанной конструкторским бюро Корунд-М, 109117, Москва, а/я 10.
Процессоры осуществляют накопление сигналов и обработку их методом гармонического анализа для формирования синтезированных апертур, а этот алгоритм опубликован в общедоступных источниках (например, в [Радиолокационные станции с цифровым синтезированием апертуры антенны. /Под ред. Горяинова В. Т. - М.: Радио и связь, 1988] на стр.64-75). Весь алгоритм процесса обработки включает перемножение накопленного сигнала на интервале синтезирования с опорной функцией и вычисление преобразования Фурье результата перемножения.
При реализации синхронизатора 2 и процессоров 8, 9 и 10 в виде общих частей одной процессорной системы линии связи между синхронизатором 2 и БЗУ 5, 6 и 7 означает управление на программном уровне процессом записи соответствующих отсчетов в три параллельные системы обработки для реализации алгоритма синтезирования апертуры.
В качестве синхронизатора может использоваться генератор импульсов, встраиваемый в микропроцессорную систему [Горшков А.Н. Генератор прямоугольных импульсов. - Авт.св. 1270880 (СССР), БИ, 1986, 42], позволяющий формировать последовательности импульсов с программируемым периодом следования и длительностью импульсов, или другие генераторы импульсов, построенные на таком принципе.
Таким образом, данная РЛС позволяет более точно измерять радиальную скорость движущихся наземных целей, так как в ней нет ошибок измерения скорости из-за амплитудного и фазового разбаланса приемных трактов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЕЛЕКЦИИ И ИЗМЕРЕНИЯ РАДИАЛЬНЫХ СКОРОСТЕЙ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ | 2006 |
|
RU2322682C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАЗЕМНОЙ ЦЕЛИ С ПОМОЩЬЮ РЛС С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2468384C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ | 1994 |
|
RU2084920C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2347238C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347239C1 |
| СПОСОБ ВЫБОРА ОПТИМАЛЬНОЙ ПРОДОЛЖИТЕЛЬНОСТИ ИНТЕРВАЛА СИНТЕЗИРОВАНИЯ В РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2008 |
|
RU2378662C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАБЛЮДЕНИЯ (РАКУРСА) ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2316789C1 |
| УСТРОЙСТВО САМОКОНТРОЛИРУЮЩЕГОСЯ МУЛЬТИПЛЕКСОРА | 1998 |
|
RU2144694C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1990 |
|
RU2037844C1 |
Изобретение относится к радиолокации. Технический результат - повышение точности измерения радиальной скорости движущихся наземных целей. В изобретении вместо нескольких приемных трактов и процессора обработки амплитудного и фазового разбаланса РЛС используется только один приемный тракт, а при обработке принятого сигнала используют, в том числе, синхронизатор и три буферных запоминающих устройства, в которых осуществляется накопление отсчетов, соответствующих трем интервалам синтезирования, сдвинутым друг относительно друга на один или несколько периодов повторения зондирующих импульсов. 2 с.п.ф-лы, 2 ил.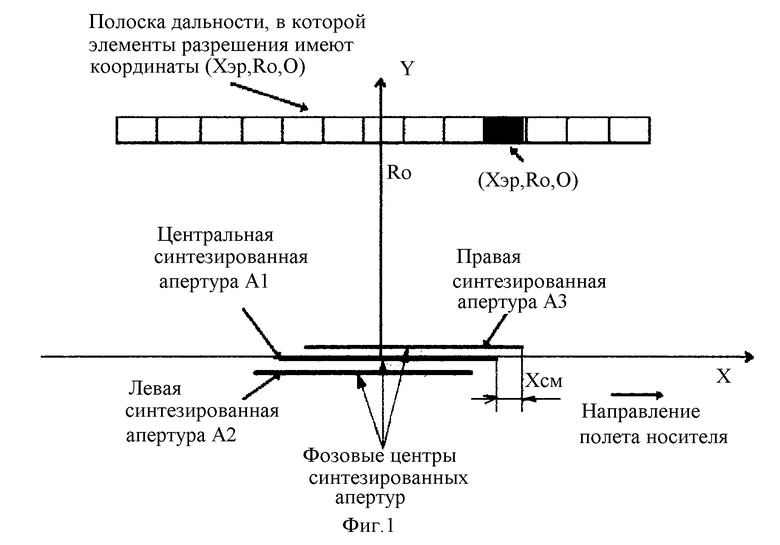
| US 4825213, 25.04.1989 | |||
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ | 1994 |
|
RU2084920C1 |
| Устройство для наблюдения за уровнем воды в паровых котлах | 1932 |
|
SU31443A1 |
| US 4549184, 08.10.1985 | |||
| US 4546354, 11.07.1985. | |||

