to
CD
00
ел
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Схват | 1983 |
|
SU1093546A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Схват | 1983 |
|
SU1098790A1 |
Изобретение относится к машиностроению, а именно к схватам промьт - ленных манипуляторов с автоматическим управлением. Целью изобретения является расширение функциональных возможностей за счет определения конфигурации захватьшаемых объектов из заданной номенклатуры. При захвате объекта, находящегося между парами : губок 2, тягу 7 перемещают вверх относительно корпуса 1, что приводит к перемещению рычагов 6 и зубчатых реек 5, образующих параллелограмный механизм. Рейки 5, находясь в зацеп лении с зубчатыми секторами, закрепленными на губках 2, перемещают их до касания с захватываемым объектом. В зависимости от диаметра объекта под каждой из губок будет происходить смещение рычагов 6 от исходного положения, которое регистрируется датчиком 8 положения пар губок относительно друг друга. 3 ил. 
фиг. 1
11/
Изобретение относится к машиностроению, а именно к схватам мани пулятора с автоматическим управлением.
Цель изобретения - расширение функциональных возможностей за счет определения конфигурации захватываемых объектов из заданной номенклатуры.
На фиг,1 изображен схват манипуля- Q закренлен} ым на шарнире 14, поворачи-
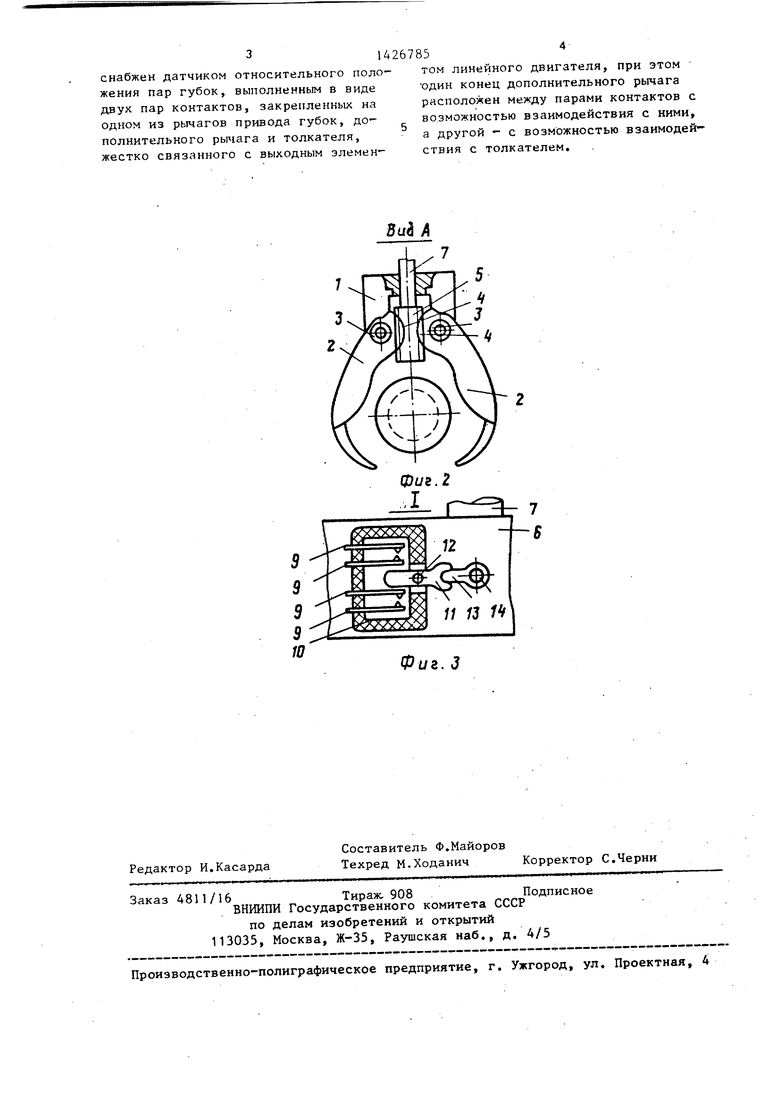
тора, общий вид; на фиг.2 вид А на фиг.; на фиг.З - узел I на фиг.1.
Схват манипулятора содержит корпус 1, на котором установлены две пары поворотных губок 2, свободно сидящих на осях 3, жестко закрепленных в корпусе 1. Губки 2 соединены с приводом перемещения, включающим жестко закрепленные на губках 2 зубчатые
секторы 4, входящие попарно в зацеп- 20 Н1фов и замкнуты верхние контакты 9
ление с зубчатыми рейками 5, связанными между собой рычагами 6 и образующими с ними параллелограммный механизм.
Рычаги 6 шарнирно связаны с тягой
7двигателя линейного перемещения (не показан). Привод устройства соединен с датчиком 8 положения пар губок относительно друг друга. Датчик
8состоит из двух пар, например, юр- мально разомкнутых контактов 9, установленных в диэлектрическом корпусе
10, который закреплен на одном из рычагов 6.
Между парами контактов 9 расположен дополнительный рычаг 11, свободно сидящий на оси 12, Рычаг 11 находится .в зацеплении с толкателем 13, жестко связанным с шарниром 14, со
Формула изобретени
45
единяющим рычаг 6, на котором закреп- Q валов, а также брусков (тетраидов) лен диэлектрический корпус 10, и тягу и пирамид. 7 привода схвата,
Схват работает следующим образом.
При захвате объекта, шходящегося между губками 2, тягу 7 перемещают вверх относительно корпуса 1. Вместе с тягой 7 перемещают вверх рычаги 6 и рейки 5. Поскольку рейки 5 находятся в зацеплении с секторами 4, то последние совместно с губками 2 поворачиваются на осях 3, обеспечивая захват изделия.
Профиль губок 2 выбран так, что обеспечивает не только захват круглых тел вращения, типа конус или ступен- , губках, о чатый вал, но и центрирование их в определенном диапазоне диаметров. В случае захвата, например ступенчатого вала (фиг.1), левые губки 2 сводятся
50
Схват манипулятора, содержащий две пары расположенных в параллельных плоскостях губок с приводом их перемещения, выполненным к виде линейного двигателя, подвижный элемент которого связан через пару рычагов, образующих параллелограммный механизм, с двумя зубчатььми рейками, находящимися в зацеплении с зуб чатыми секторами, закрепленньми на
т л и ч а ю щ и и с я
тем, что, с целью расширения функци нальных возможностей за счет опреде ления конфигурации захватываемых об ектов из заданной номенклатуры, он
на больший угол, чем правь е, что обеспечивается перекосом шарнирного параллелограмма, образованного рейками 5 и рычагами 6 совместно с тягой 7. При этом рычаги 6 поворачиваются относительно шарниров, в том числе и относительно шарнира 14, против часовой стрелки. Толкателем 13, жестко
вается рычаг 11, который замыкает нижние контакты 9 датчика 8. При захвате изделия конусной или ступенчатой цилиндрической формы с меньшим диаметром, находящимся с противоположной стороны, происходят аналогичные процессы, отличающиеся от указанных лишь тем, что рычаги 6 повернуты по часовой стрелке относительно шар5
0
5
датчика 8.
В случае захвата гладкого цилиндрического изделия, типа вала, губки 2 сводят на один и тот же угол.. Рычаги 6 остаются в горизонтальном положении, т.е. отсутствует их поворот относительно шарниров. Толкатель 13 и рычаг 11 остаются в исходном положении, а пары контактов 9 - незамкнуты.
Таким образом, на выходе датчика 8 формируются сигналы, определяющие пространственное положение изделий с монотонным изменением линейных размеров вдоль фиксируемой захватом координаты изделия и позволяющие распознавать их форму, например гладких цилиндров и конусов или ступенчатых
Формула изобретения
губках, о
Схват манипулятора, содержащий две пары расположенных в параллельных плоскостях губок с приводом их перемещения, выполненным к виде линейного двигателя, подвижный элемент которого связан через пару рычагов, образующих параллелограммный механизм, с двумя зубчатььми рейками, находящимися в зацеплении с зубчатыми секторами, закрепленньми на
т л и ч а ю щ и и с я
тем, что, с целью расширения функциональных возможностей за счет определения конфигурации захватываемых объектов из заданной номенклатуры, он
снабжен датчиком относительного положения пар губок, выполненным в виде двух пар контактов, закрепленных на одном из рычагов привода губок, дополнительного рычага и толкателя, жестко связанного с выходным элементом линейного двигателя, при этом один конец дополнительного рычага расположен между парами контактов с возможностью взаимодействия с ними, а другой - с возможностью взаимодействия с толкателем.
Фи&. 3
| Захват манипулятора | 1977 |
|
SU795939A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
