Изобретение относится к гидроакустике, а именно к гидроакустическим навигационным средствам, и может быть использовано для обеспечения навигации подводных объектов.
Известна синхронная дальномерная навигационная система, содержащая донную навигационную базу из M гидроакустических маяков-приемоответчиков с различными рабочими частотами ответа, размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, M-канальный приемник, M измерителей времени распространения гидроакустических сигналов до приемоответчиков, работающих на частотах этих сигналов, и обратно и вычислитель координат объекта навигации [см., например, Милн П.Х. Гидроакустические системы позиционирования: Пер. с англ. - Л.: Судостроение. - 1989. - 272 с. - с.49-60].
Все перечисленные элементы этого аналога входят и в состав заявляемой системы.
Работа этого аналога основана на измерении времени распространения звукового сигнала от объекта навигации до маяков и обратно, вычислении дистанций между объектом навигации и маяками с учетом постоянства скорости звука в водной среде и последующего пересчета этих дистанций в координаты объекта навигации.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является низкая точность работы в среде, содержащей отражающие границы. Несоответствие дистанций, рассчитанных в этих условиях, реальным приводит к существенным ошибкам определения координат объекта навигации, делает функционирование этой системы в условиях рефракции и многолучевости траекторий прохождения сигналов неприемлемым.
Наиболее близкой по технической сущности к заявляемой системе (прототипом) является система, содержащая в каждом из M каналов определения дистанций помимо элементов, входящих в состав приведенного выше аналога, N - по числу видов возможных траекторий - блоков преобразования временных интервалов в дистанции и блок выбора максимального значения дистанции.
Гидроакустическая синхронная дальномерная навигационная система-прототип защищена патентом РФ №713278, кл. G01S 15/08, 1978. Признаками, общими с заявляемой системой, в системе-прототипе являются база из M гидроакустических маяков-ответчиков, размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, M-канальный приемник, M измерителей времени распространения гидроакустических сигналов, M блоков преобразования временных интервалов в дистанции, вычислитель координат объекта навигации и их связи.
Использование имеющихся в каждом из M каналов определения дистанций N блоков преобразования временных интегралов в дистанции и блока выбора максимального значения дистанции позволяет учесть условия рефракции сигналов и многолучевость траекторий и исключить ошибки определения координат объекта навигации, присущие первому аналогу.
Причиной, препятствующей достижению в системе-прототипе технического результата, достигаемого в изобретении, является сложность системы, обусловленная большим количеством блоков преобразования временных интервалов в дистанции и наличием блоков выбора максимального значения дистанции. Это обстоятельство в свою очередь не позволяет обеспечить достаточно высокий уровень надежности системы и приводит к существенному увеличению ее энергопотребления, что крайне нежелательно в условиях автономного нахождения объекта навигации в подводном положении.
Технической задачей, на решение которой направлено изобретение, является упрощение и повышение надежности системы.
Технический результат достигается тем, что в известной гидроакустической синхронной дальномерной навигационной системе блоки преобразования временных интервалов в дистанции выполнены управляемыми, их управляющие входы подключены к соответствующим входам управления системы, а выходы - к соответствующим входам вычислителя координат объекта навигации.
Для достижения технического результата в известной гидроакустической синхронной дальномерной навигационной системе, содержащей донную навигационную базу из M гидроакустических маяков-приемоответчиков с различными рабочими частотами ответа, размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, первый выход которого подключен ко входу передатчика, M-канальный приемник, M измерителей времени распространения гидроакустических сигналов до приемоответчика, работающего на частотах этого сигнала, и обратно, входы обнуления которых подключены ко второму выходу генератора синхроимпульсов, а входы запуска - к соответствующим выходам M-канального приемника, M блоков преобразования временных интервалов в дистанции, сигнальные входы которых подключены к выходам соответствующих измерителей времени распространения гидроакустических сигналов, и вычислитель координат объекта навигации, блоки преобразования временных интервалов в дистанции выполнены управляемыми, их управляющие входы подключены к соответствующим входам управления системы, а выходы - к соответствующим входам вычислителя координат объекта навигации.
Совокупность вновь введенных связей и особенностей выполнения блоков преобразования временных интервалов в дистанции неизвестна из имеющихся в распоряжении заявителя источников информации. Поэтому заявляемую систему навигации следует считать новой и соответствующей изобретательскому уровню.
Сущность изобретения поясняется чертежом, на котором на фиг.1 приведена структурная схема предлагаемой системы.
Гидроакустическая синхронная дальномерная навигационная система содержит донную базу из M гидроакустических приемоответчиков 1.1, 1.2, …, 1.M, передатчик 2 акустических импульсов, M-канальный приемник 3 гидроакустических сигналов, M измерителей 4.1, 4.2, … 4.M времени распространения гидроакустических сигналов от передатчика 2 до приемоответчика  и обратно, M блоков 5.1, 5.2, …5.M преобразования временного интервала в дистанцию i-го канала
и обратно, M блоков 5.1, 5.2, …5.M преобразования временного интервала в дистанцию i-го канала  , вычислитель 6 координат объекта навигации и генератор 7 синхроимпульсов. Все элементы системы, кроме приемоответчиков 1.1, 1.2, …, 1.M, входящих в состав донной базы, установлены на объекте навигации.
, вычислитель 6 координат объекта навигации и генератор 7 синхроимпульсов. Все элементы системы, кроме приемоответчиков 1.1, 1.2, …, 1.M, входящих в состав донной базы, установлены на объекте навигации.
Вход передатчика 2 соединен с первым выходом генератора 7, второй выход которого соединен со входами обнуления измерителей 4.1, 4.2, … 4.M, соединенных своими входами запуска с соответствующими выходами приемника 3, а выходами - с сигнальными входами блоков 5.1, 5.2, … 5.M соответственно. Управляющие входы блоков 5.1, 5.2, … 5.M соединены с соответствующими входами системы, а выходы - с соответствующими входами вычислителя 6.
Работа системы заключается в следующем.
Генератор 7 запускает передатчик 2 акустических импульсов и обнуляет интеграторы М измерителей 4.1, 4.2, … 4.M. В момент запуска передатчик 2 излучает акустический сигнал запроса, который, распространяясь в водной среде, принимается приемоответчиками 1.1, 1.2, …, 1.M. Каждый из приемоответчиков в момент прихода на него сигнала запроса излучает акустический сигнал со своей определенной частотой заполнения fi (i=1, 2, …, M). Сигналы, излученные премоответчиками 1.i (i=1, 2, …, M), распространяясь в водной среде, принимаются M-канальным приемником 3. Каждый из каналов приемника 3 настроен на одну из частот fi таким образом, что в каждом канале усиливается и детектируется сигнал ответа, излученный соответствующим ему приемоответчиком 1.i. Усиленные в приемнике 3 сигналы с выхода каждого из каналов поступают на запирающие входы соответствующих измерителей 4.i и запирают своими передними фронтами интеграторы меток времени.
В момент формирования генератором 7 очередного синхроимпульса происходит передача в цифровом коде в соответствующий блок 5.i (i=1, 2, …, M) информации о числе меток времени, накопленных измерителем 4.i за соответствующее время распространения сигнала от объекта навигации до соответствующего приемоответчика 1.i и обратно, от интегратора соответствующего измерителя 4.i.
Блоки 5.1, 5.2, … 5.M имеют различные начальные установки глубины погружения объекта навигации. На управляющие входы блоков 5.i с i-го входа системы поступают коды целочисленных коэффициентов, характеризующих эти трассы. Блоки 5.i выполняют операцию умножения поступившего на его вход числа меток времени на постоянный коэффициент, являющийся в общем случае функцией двух параметров: начальной установки глубины погружения и типа трассы. На выходах блоков 5.i формируются коды численных значений наклонных дальностей от объекта навигации до соответствующих приемоответчиков 1.i. Эти коды поступают на соответствующие входы вычислителя 6.
В вычислителе 6 по поступившим на его входы дистанциям между объектом навигации и приемоответчиками 1.i (i=1, 2, …, M), координаты которых заранее известны, рассчитываются координаты объекта навигации.
Таким образом, в заявляемой системе координаты объекта навигации определяются, как и в системе-прототипе, с учетом типа трассы. Однако, в заявляемой системе блоков преобразования интервалов времени в дистанцию в N раз меньше, чем в системе-прототипе. A блоки выбора максимума дистанции вообще отсутствуют. Большая простота системы обеспечивает ей более высокую надежность. Ориентировочный расчет показывает, что наработка на отказ заявляемой системы примерно на 20% больше, чем у системы-прототипа.
Гидроакустическая синхронная дальномерная навигационная система относится к гидроакустике, а именно к гидроакустическим навигационным средствам, и может быть использована для обеспечения навигации подводных объектов. Гидроакустическая синхронная дальномерная навигационная система содержит базу из М гидроакустических приемоответчиков 1.1, 1.2, …, 1.М, передатчик 2 акустических импульсов, М-канальный приемник 3 гидроакустических сигналов, М измерителей 4.1, 4.2, … 4.М времени распространения гидроакустических сигналов от передатчика 2 до приемоответчика  и обратно, М управляемых блоков 5.1, 5.2, … 5.М преобразования временного интервала в дистанцию i-го канала
и обратно, М управляемых блоков 5.1, 5.2, … 5.М преобразования временного интервала в дистанцию i-го канала  вычислитель 6 координат объекта навигации и генератор 7 синхроимпульсов. Все элементы системы, кроме приемоответчиков 1.1, 1.2, …, 1.М, входящих в состав донной базы, установлены на объекте навигации. Совокупность вновь введенных связей и особенностей выполнения блоков преобразования временных интервалов в дистанции обеспечивает системе простоту и надежность. 1 ил.
вычислитель 6 координат объекта навигации и генератор 7 синхроимпульсов. Все элементы системы, кроме приемоответчиков 1.1, 1.2, …, 1.М, входящих в состав донной базы, установлены на объекте навигации. Совокупность вновь введенных связей и особенностей выполнения блоков преобразования временных интервалов в дистанции обеспечивает системе простоту и надежность. 1 ил.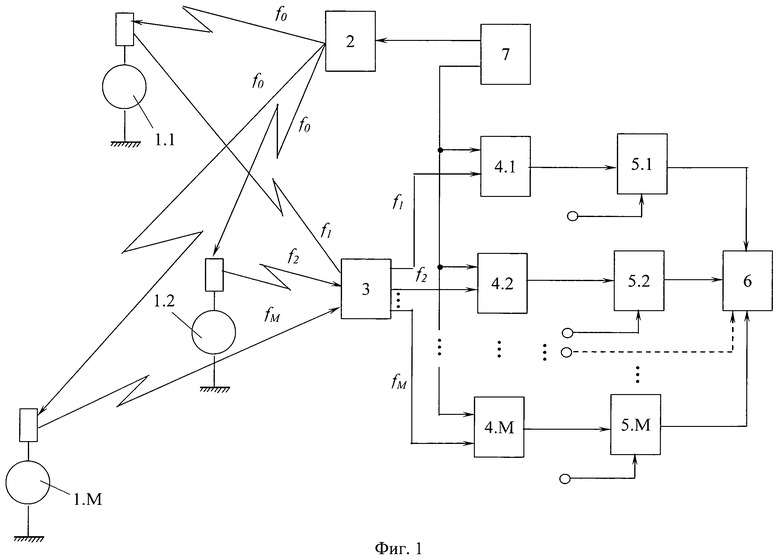
Гидроакустическая синхронная дальномерная навигационная система, содержащая донную навигационную базу из М гидроакустических маяков-приемоответчиков с различными рабочими частотами ответа, размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, первый выход которого подключен ко входу передатчика, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчика, работающего на частотах этого сигнала, и обратно, входы обнуления которых подключены ко второму выходу генератора синхроимпульсов, а входы запуска - к соответствующим выходам М-канального приемника, М блоков преобразования временных интервалов в дистанции, сигнальные входы которых подключены к выходам соответствующих измерителей времени распространения гидроакустических сигналов, и вычислитель координат объекта навигации, отличающаяся тем, что блоки преобразования временных интервалов в дистанции выполнены управляемыми, их управляющие входы подключены к соответствующим входам управления системы, а выходы - к соответствующим входам вычислителя координат объекта навигации.
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1972 |
|
SU1840781A1 |
| KR 20080085509 A, 24.09.2008 | |||
| JP 2008128968 A, 05.06.2008 | |||
| JP 10111352 A, 28.04.1998. | |||

