ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это изобретение относится к способам, устройству и коду компьютерной программы для обработки данных из съемок потенциального поля для внесения поправок на влияние лежащего в основе рельефа местности. Варианты осуществления технологий особенно полезны для обработки данных из аэросъемок, в частности, съемок гравитационного поля.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В этом описании изобретения мы обратимся к аэросъемкам, а более точно к съемкам градиента гравитации. Однако технологии, которые мы описываем, не ограничены этими типами съемки и могут применяться к другим съемкам потенциального поля, в том числе, но не в качестве ограничения, гравитационным съемкам, съемкам магнитного поля, таким как магнитотеллурические съемки, электромагнитным съемкам и тому подобному.
Съемка потенциального поля выполняется измерением данных потенциального поля, которые, для гравитационной съемки, могут содержать одни или более из данных гравиметра (измеряющих гравитационное поле) или данных гравитационного градиентометра (измеряющих градиент гравитационного поля), данных векторного магнетометра, данных истинного магнитного градиентометра и других типов данных, широко известных специалистам в данной области техники. Общая цель геофизической съемки потенциального поля состоит в том, чтобы разыскивать характерные особенности, которые потенциально указывают месторождения ценного минерального сырья.
Традиционно аэросъемки потенциального поля, такие как гравитационные съемки, облетаются по сетке делений. Сетка определена ортогональными множествами параллельных линий (траекторий полета) на двухмерной поверхности, которая наброшена поверх лежащего в основе рельефа местности. Однако наброшенная поверхность ограничена максимальной близостью к земле, на которой летательному аппарату разрешено летать, и максимальной скоростью подъема/снижения летательного аппарата. Некоторые усовершенствованные технологии для аэросъемки потенциального поля, которые облегчают сбор данных с близкого расстояния к земле, описаны в находящейся в процессе одновременного рассмотрения заявке на патент PCT заявителя «Gravity Survey Data Processing» («Обработка данных гравитационной съемки»), PCT/GB2006/050211, настоящим включенной в состав посредством ссылки во всей своей полноте.
После того как данные потенциального поля были собраны, но до интерпретации данных обычно применяется внесение поправок на рельеф местности, компенсирующее колебания высоты земной поверхности. Данные приземных наблюдений могут приобретаться в виде цифровых данных подъема земной поверхности или определяться из (D)GPS ((Дифференциальной) глобальной системы определения местоположения) и/или аэротехнологий, таких как LIDAR (устройство обнаружения и определения расстояния при помощи формирования лазерного изображения) и SAR (радиолокационная станция с синтезированной апертурой). Данные ускорения, высоты над уровнем моря, угловой скорости и углового ускорения летательного аппарата также могут использоваться для внесения поправок в выходные данные средства измерения потенциального поля. Мы описываем некоторые усовершенствованные технологии для внесения поправок на рельеф местности при геофизических съемках в нашей находящейся в процессе одновременного рассмотрения заявке на патент Соединенного Королевства «Terrain Correction Systems» («Системы внесения поправок на рельеф местности»), № 0601482.3, зарегистрированной 25 января 2006 года, настоящим также включенной в состав посредством ссылки во всей своей полноте.
Еще одна технология, описанная в WO 03/032015, вносит поправки в измерения из геофизических средств измерения в реальном времени в источнике из других навигационных и картографических средств измерения, несомых летательным аппаратом. Однако на практике этот тип «оперативной» коррекции страдает от некоторого количества недостатков.
Таким образом, остается необходимость в усовершенствованных технологиях обработки данных. Например, одна из проблем возникает там, где земная поверхность быстро изменяется, так что может возникать пространственное искажение, более точно, где земная поверхность имеет пики или другие отклонения в масштабе длин, который является меньшим, чем расстояние между линиями (облета) съемки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту изобретения поэтому предложен способ обработки данных измерения потенциального поля из съемки потенциального поля передвижной платформы для картографирования поля, способ содержит: ввод упомянутых измеренных данных потенциального поля, упомянутые измеренные данные потенциального поля содержат данные, определяющие временной ряд измерений потенциального поля, снятых средством измерения потенциального поля, установленным на передвижной платформе, каждое из упомянутых измерений имеет ассоциированные данные, определяющие положения упомянутых измерений в качестве функции времени; ввод данных рельефа местности, определяющих пространственное отклонение рельефа местности, снимаемого посредством упомянутой съемки потенциального поля; определение поправочных данных временной области, которые должны применяться к упомянутым измеренным данным потенциального поля во временной области, упомянутое определение использует упомянутые данные рельефа местности и упомянутые ассоциированные данные, определяющие положения упомянутых измерений в качестве функции времени; и корректировку упомянутых измеренных данных потенциального поля, определяющих упомянутый временной ряд измерений потенциального поля, с использованием упомянутых поправочных данных временной области для предоставления исправленных рельефом местности измеренных данных потенциального поля для упомянутого картографирования упомянутого поля.
В вариантах осуществления способ реализуется автономно, после сбора данных потенциального поля с использованием передвижной платформы. Внесение поправок, однако, выполняется во временной области посредством упреждающего расчета из данных в базе данных модели рельефа местности во временной ряд местоположений измерения.
Предпочтительно, определение поправочных данных временной области включает в себя компенсацию полосы пропускания средства измерений потенциального поля. В вариантах осуществления это содержит фильтрацию поправочных данных временной области с использованием фильтра, подобранного под характеристику, например импульсную характеристику, средства измерений. Например, это может содержать интегрирование измерений на временном интервале интегрирования, зависящем от характеристики средства измерений потенциального поля.
В некоторых предпочтительных вариантах осуществления поправочные данные временной области содержат набор расчетных значений измеренного потенциального поля, обусловленных рельефом местности в трехмерных положениях в пространстве вдоль линий съемки при съемке потенциального поля. Однако, вообще, эти положения не будут соответствовать реальным зарегистрированным положениям измерения. Взамен, предпочтительно, положениям передвижной платформы на расположенных с равными интервалами промежутках времени (и, таким образом, зависящим от скорости передвижной платформы). Таким образом, вообще говоря, поправочные данные временной области содержат действующую составляющую данных средства измерений поля, рассчитанных с упреждением из данных рельефа местности в трехмерных положениях в пространстве, x(t), y(t), z(t), на расположенных с равными интервалами промежутках времени. Этот вклад в потенциальное поле, обусловленный рельефом местности, в качестве функции положения в пространстве передвижной платформы на равных промежутках времени, затем может вычитаться из реальных измерений потенциального поля, чтобы оставлять интересующий сигнал для дальнейшей обработки данных, в частности, обусловленный лежащими в основе геологическими формациями. Любой или оба из реального измеренного сигнала и сигнала поправки на рельеф местности, по выбору, могут экстраполироваться и/или интерполироваться, так что соответствующие измерительные точки по существу выравниваются для выполнения внесения поправок.
Предпочтительно, способ дополнительно содержит определение набора параметров картографирования, картографируя поле с использованием скорректированных измеренных данных потенциального поля. Специалист будет понимать, что есть много путей достижения этого, в том числе упомянутые в наших (там же) ранее зарегистрированных заявках на патенты, а также в нашей заявке на патент Соединенного Королевства, под номером 07017254, зарегистрированной 30 января 2007 года, все настоящим включены в состав посредством ссылки во всей своей полноте.
Специалист будет понимать, что обычно при измерении данных потенциального поля тем, что реально измеряется, являются гравитация и/или градиент гравитации (хотя, дополнительно или в качестве альтернативы, могут измеряться другие величины, выводимые из пространственных производных потенциального поля).
В некоторых предпочтительных вариантах осуществления передвижная платформа содержит летательный аппарат, а съемка содержит аэросъемку потенциального поля, но технологии, которые мы описываем, также могут применяться к морским или наземным съемкам потенциального поля с судна или наземного аппарата.
Изобретение дополнительно предлагает код управления процессора для реализации описанных способов, в частности, на носителе данных, таком как диск, CD- или DVD-ROM (ПЗУ на компакт-диске или многофункциональном цифровом диске), программируемая память, такая как постоянное запоминающее устройство (аппаратно-реализованное программное обеспечение), или на носителе данных, таком как носитель оптического или электрического сигнала. Код (и/или данные) для реализации вариантов осуществления изобретения может содержать исходный, объектный или исполняемый код на традиционном языке программирования (интерпретируемом или компилируемом), таком как C, или ассемблерный код, код для настройки или управления ASIC (специализированной интегральной схемы) или FPGA (программируемой пользователем вентильной матрицы), или код для языка описания аппаратных средств, таких как Verilog (торговая марка) или VHDL (язык описания аппаратных средств сверхвысокоскоростных интегральных схем). Как будет принимать во внимание специалист, такой код и/или данные могут быть распределены между множеством соединенных компонентов на связи друг с другом, например, распределенных по сети.
Изобретение дополнительно предлагает систему обработки данных, сконфигурированную для реализации вариантов осуществления вышеописанных способов.
Таким образом, согласно дополнительному аспекту изобретения, предложена система обработки данных для обработки данных измерения потенциального поля из съемки потенциального поля передвижной платформы для картографирования поля, система содержит: память данных для хранения измеренных данных потенциального поля, упомянутые измеренные данные потенциального поля содержат данные, определяющие временной ряд измерений потенциального поля, снятых средством измерений потенциального поля, установленным на передвижной платформе, каждое из упомянутых измерений имеет ассоциированные данные, определяющие положения упомянутых измерений в качестве функции времени, и для хранения данных рельефа местности, определяющих пространственное отклонение рельефа местности, снимаемого посредством упомянутой съемки потенциального поля; и память программ, хранящую код управления процессора; и процессор, присоединенный к упомянутой памяти данных и упомянутой памяти программ, чтобы загружать и реализовывать упомянутый код управления, упомянутый код содержит код для: ввода упомянутых измеренных данных потенциального поля и упомянутых ассоциированных данных для упомянутых измерений; ввода упомянутых данных рельефа местности; определения поправочных данных временной области, которые должны применяться к упомянутым измеренным данным потенциального поля во временной области с использованием упомянутых данных рельефа местности и упомянутых ассоциированных данных, определяющих положения упомянутых измерений в качестве функции времени; и корректировки упомянутых измеренных данных потенциального поля, определяющих упомянутый временной ряд измерений потенциального поля, с использованием упомянутых поправочных данных временной области для предоставления исправленных рельефом местности измеренных данных потенциального поля для упомянутого картографирования упомянутого поля.
Предпочтительно, код также содержит код для корректировки поправочных данных посредством подбора фильтра для имитации характеристики средства измерений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения далее будут дополнительно описаны, только в качестве примера, со ссылкой на прилагаемые чертежи:
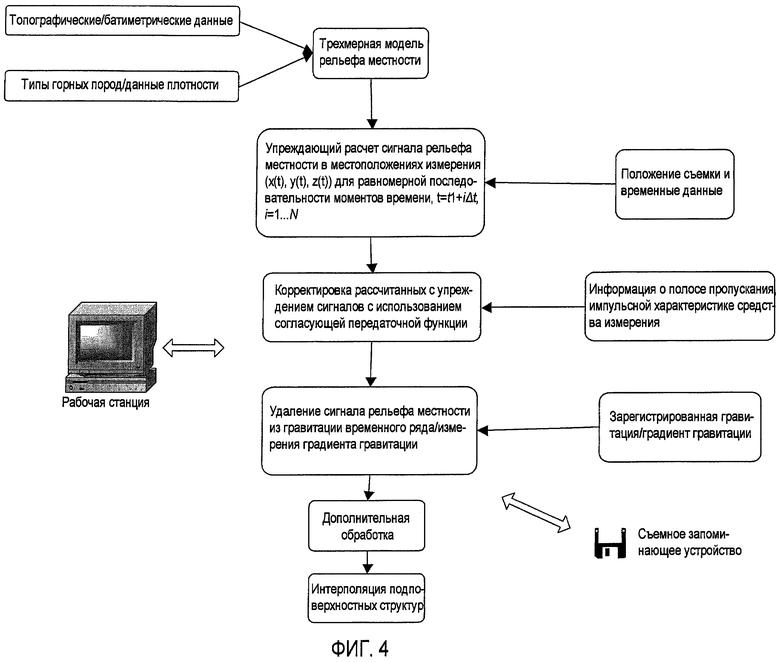
фиг.1 схематически показывает график высоты в зависимости от расстояния, иллюстрирующий сечение рельефа местности под линией облета аэросъемки потенциального поля;
фиг.2a схематически показывает отклонение составляющей Gzz градиента гравитации в зависимости от времени на основании упреждающего расчета по модели рельефа местности фиг.1 на расположенных с равными интервалами промежутках времени, а фиг.2b показывает скорректированные рассчитанные с упреждением данные после фильтрации во временной области с использованием фильтра для подбора характеристики измерительной системы;
фиг.3 иллюстрирует разность между поправочными данными рельефа местности временной области до и после этапа фильтрации; и
фиг.4 схематично показывает блок-схему последовательности операций процедуры для реализации варианта осуществления способа согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В тех случаях, когда мы указываем ссылкой на поле, в частности, гравитационное поле, это не ограничено векторным полем, а включает в себя скалярные и тензорные поля, потенциальное поле и любые производные, выводимые из потенциального поля.
Данные потенциального поля включают в себя, но не в качестве ограничения, данные гравиметра, данные гравитационного градиентометра, данные векторного магнетометра и данные истинного магнитного градиентометра. Элементы и представления потенциального поля могут быть выведены из скалярной величины.
Со ссылкой на фиг.1 это показывает примерную линию облета съемки над земной поверхностью, на которой стрелка показывает направление облета.
Фиг.2b показывает рассчитываемую с упреждением Gzz во временной области, и фиг.2b показывает рассчитанную с упреждением Gzz после фильтрации полосой пропускания средства измерений. Фиг.3 показывает разность между кривыми по фиг.2a и 2b, показывая изменение поправки на рельеф местности, обусловленное фильтрацией.
Технологии внесения поправок во временной области
Далее мы описываем технологии внесения поправок во временной области, в частности, со ссылкой на фиг.4.
Сигнал наибольшей амплитуды и ширины полосы пропускания при съемке гравитационного поля почти всегда проистекает из топографии. Зачастую, при интерпретации гравитационного поля, сигнал рельефа местности удаляется внесением поправок на рельеф местности, выполняемым на поздней стадии обработки данных. В этот момент весь смысл природы временной области сбора данных терялся, так как данные подвергались манипулированию с использованием пространственных технологий.
Посредством выполнения внесения поправок на рельеф местности рано в последовательности обработки, когда данные все еще представлены во временной области, в конечном счете, можно создавать лучшую карту лежащей в основе геологии, так как поправка на рельеф местности может приводиться в более близкое соответствие данным, которые реально регистрировались средством измерений. В частности, поправка во временной области будет правильно удалять высокочастотные сигналы рельефа местности, которые, в ином случае, подвергались бы искажению контуров при пространственном анализе. К тому же посредством выполнения внесения поправок в такой же области, как измерительная система, реальная передаточная функция средства измерения может привноситься в поправочные данные. Это означает, что поправка на рельеф местности скорее удаляет влияние, которое имеет рельеф местности на регистрируемые данные измерений, чем удаляет сам сигнал рельефа местности. Это особенно важно для аэросъемки, облетаемой на низкой абсолютной высоте над сильно изменчивой земной поверхностью, поскольку полоса пропускания измерительной системы может значительно изменять высокочастотные сигналы рельефа местности.
Предпочтительная реализация системы внесения поправок на рельеф местности во временной области действует согласно фиг.4, которая показывает блок-схему из этапов, включенных в предпочтительное динамическое внесение поправок на рельеф местности; эта процедура может быть реализована программным обеспечением на носителе, таком как диск, или в компьютерной системе, как схематически проиллюстрировано.
Геометрия трехмерной (3D) модели рельефа местности строится с использованием имеющихся в распоряжении топографических и батиметрических данных. Распределение значений плотности в пределах модели проводится согласно информации, возникающей из типов горных пород, скважинных данных или технологий формирования пронизывающих поверхность изображений. Разрешение модели должно быть соответствующим, чтобы точно воссоздавать снимаемые данные потенциального поля по рельефу местности. Таким образом, предпочтительно, модель имеет протяженность, которая выходит за пределы границ съемки на достаточное расстояние, чтобы делать вклад от рельефа местности за пределами модели незначительным.
Модель рельефа местности используется для предсказания (упреждающего расчета) вклада, который рельеф местности производит в суммарный сигнал в течение длительности съемки на последовательности постоянных временных интервалов,
t = t1+ iΔt (1)
где i - целое число, а Δt - время выборки для расчета. Δt выбирается так, чтобы разрешение расчетного сигнала рельефа местности превышало измерительную полосу пропускания средства измерений. Например, если полоса пропускания имеет значение 0,5 Гц, время выборки для расчета должно быть меньшим, чем 1 секунда.
На практике сигнал рельефа местности рассчитывается с использованием принципа суперпозиции, где модель дискретизирована на множество конечных значений, каждое из которых имеет известные математические функции для упреждающего расчета гравитационного поля в заданном наборе местоположений поля. Точки поля для этих расчетов являются местоположениями (x(t), y(t), z(t)) и, возможно, ориентациями (углом наклона, углом поворота, углом рыскания) средства измерений, интерполированными во временной ряд по уравнению (1).
Рассчитанные с упреждением данные рельефа местности временного ряда модифицируются посредством фильтра, который предназначен для имитации характеристики реального измерения. Конструкция этого фильтра достигается введением сведений о полосе пропускания средства измерения и его импульсной характеристике. Надлежащий фильтр для выполнения этого является фильтром с конечной импульсной характеристикой, математически представленным вектором коэффициентов фильтра. Фильтрованные рассчитанные с упреждением данные рельефа местности в таком случае дают результат простой сверткой с фильтром.
Подобранные к полосе пропускания поправочные данные рельефа местности затем подвергаются повторной выборке во временной ряд зарегистрированных измерений и вычитаются из них, давая новый набор необработанных данных измерений, готовый к последующей обработке.
Хотя мы описали технологию с использованием предпочтительного примера аэросъемки потенциального поля, варианты осуществления также могут применяться для морских съемок потенциального поля, проводимых с судна, а в более общем смысле, к съемкам потенциального поля, проводимым с других передвижных платформ или транспортных средств.
Технологии не ограничены обработкой гравитационных данных, но также могут применяться, например, при обработке данных магнитного поля. Измеренные данные потенциального поля, таким образом, могут быть получены посредством измерения магнитного поля и/или вектора плотности потока, и/или его модуля, например, с использованием измерения, произведенного магнитным градиентометром. Если используются эквивалентные исходные элементы, они, например, в таком случае, могут иметь поверхностную плотность тока или мощность полюса.
Будет понятно, что изобретение не ограничено описанными вариантами осуществления и охватывает модификации, очевидные специалистам в данной области техники, принадлежащие к сущности и объему формулы изобретения, приложенной к этому.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБРАБОТКА ДАННЫХ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2008 |
|
RU2486549C2 |
| СИСТЕМЫ ПОПРАВКИ НА РЕЛЬЕФ МЕСТНОСТИ | 2007 |
|
RU2442193C2 |
| СПОСОБ МНОГОКОМПОНЕНТНОГО ГРАВИМЕТРИЧЕСКОГО МОДЕЛИРОВАНИЯ ГЕОЛОГИЧЕСКОЙ СРЕДЫ | 2007 |
|
RU2364895C1 |
| ОБРАБОТКА ДАННЫХ ГРАВИМЕТРИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2431873C2 |
| ГРАВИМЕТРИЧЕСКИЙ ПОПРАВКОМЕР | 1967 |
|
SU190597A1 |
| СПОСОБ АЭРОГАММАСПЕКТРОМЕТРИЧЕСКОЙ СЪЕМКИ ГЕОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2673505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПАРЫ СНИМКОВ | 2001 |
|
RU2177603C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1988 |
|
SU1517582A1 |



Это изобретение относится к способам и устройствам для обработки данных из съемок потенциального поля, более точно аэросъемок гравитационного поля, для внесения поправок на влияния рельефа местности. Техническим результатом является создание способа и системы обработки данных измерения потенциального поля. Способ содержит: ввод измеренных данных потенциального поля, содержащих данные, определяющие временной ряд измерений потенциального поля, снятых средством измерений потенциального поля, установленным на передвижной платформе, каждое из упомянутых измерений имеет ассоциированные данные, определяющие положения упомянутых измерений в качестве функции времени; ввод данных рельефа местности, определяющих пространственное отклонение снимаемого рельефа местности; определение поправочных данных временной области, которые должны применяться к упомянутым измеренным данным потенциального поля во временной области, упомянутое определение использует упомянутые данные рельефа местности и упомянутые ассоциированные данные, определяющие положения упомянутых измерений в качестве функции времени; компенсацию полосы пропускания; и корректировку упомянутых измеренных данных потенциального поля, определяющих упомянутый временной ряд измерений потенциального поля, с использованием упомянутых поправочных данных временной области для предоставления исправленных рельефом местности измеренных данных потенциального поля для упомянутого картографирования упомянутого поля. 3 н. и 11 з.п., 4 ил.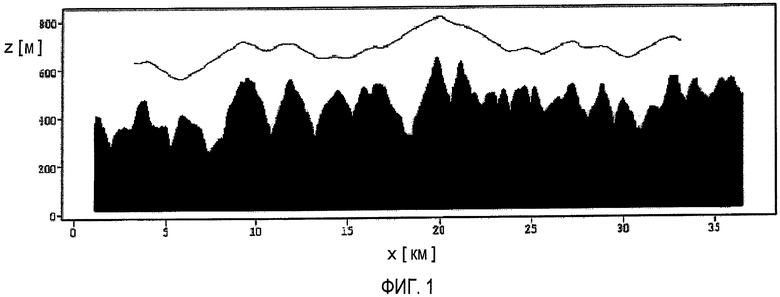
1. Способ обработки данных измерения потенциального поля из съемки потенциального поля передвижной платформы для картографирования поля, содержащий этапы, на которых:
вводят упомянутые измеренные данные потенциального поля, причем упомянутые измеренные данные потенциального поля содержат данные, определяющие временной ряд измерений потенциального поля, снятых средством измерений потенциального поля, установленным на передвижной платформе, при этом каждое из упомянутых измерений имеет ассоциированные данные, определяющие положения упомянутых измерений в зависимости от времени;
вводят данные рельефа местности, определяющие пространственное отклонение рельефа местности, снимаемого посредством упомянутой съемки потенциального поля;
определяют поправочные данные временной области, которые должны применяться к упомянутым измеренным данным потенциального поля во временной области, причем этап определения содержит этапы, на которых:
используют упомянутые данные рельефа местности и упомянутые ассоциированные данные, определяющие положения упомянутых измерений в зависимости от времени; и
выполняют компенсацию в отношении полосы пропускания упомянутого средства измерений потенциального поля; и
корректируют упомянутые измеренные данные потенциального поля, определяющие упомянутый временной ряд измерений потенциального поля, с использованием упомянутых поправочных данных временной области для предоставления измеренных данных потенциального поля с поправкой на рельеф местности для упомянутого картографирования упомянутого поля.
2. Способ по п.1, в котором при упомянутой компенсации в отношении упомянутой полосы пропускания фильтруют упомянутые поправочные данные временной области с использованием фильтра, подобранного к импульсной характеристике упомянутого средства измерений.
3. Способ по п.1 или 2, в котором при упомянутом определении упомянутых поправочных данных временной области выполняют упреждающий расчет из упомянутых данных рельефа местности в упомянутые измеренные данные потенциального поля временной области.
4. Способ по п.1, в котором упомянутые поправочные данные временной области содержат набор расчетных значений упомянутого измеренного потенциального поля, обусловленных упомянутым рельефом местности, в трехмерных положениях в пространстве вдоль линий съемки при упомянутой съемке потенциального поля.
5. Способ по п.4, в котором упомянутые трехмерные положения содержат положения упомянутой передвижной платформы на расположенных с равными интервалами промежутках времени.
6. Способ по п.1, который реализуется автономно, после сбора упомянутых данных потенциального поля с использованием упомянутой передвижной платформы.
7. Способ по п.1, дополнительно содержащий этап, на котором определяют набор параметров картографирования поля, составляя карту упомянутого поля с использованием упомянутых измеренных данных потенциального поля с поправкой на рельеф местности.
8. Способ по п.7, дополнительно содержащий этап, на котором определяют карту упомянутого поля с использованием упомянутых параметров картографирования поля.
9. Способ по п.1, в котором упомянутые измеренные данные потенциального поля содержат данные гравитации или гравитационного градиентометра.
10. Способ по п.9, в котором упомянутые измеренные данные потенциального поля содержат данные для данных градиента гравитации, Gzz.
11. Способ по п.1, при этом упомянутая передвижная платформа представляет собой летательный аппарат.
12. Носитель, несущий код управления процессором для реализации при его исполнении способа по любому из пп.1-11.
13. Система обработки данных для обработки данных измерения потенциального поля из съемки потенциального поля передвижной платформы для картографирования поля, содержащая:
память данных для хранения измеренных данных потенциального поля, причем упомянутые измеренные данные потенциального поля содержат данные, определяющие временной ряд измерений потенциального поля, снятых средством измерений потенциального поля, установленным на передвижной платформе, при этом каждое из упомянутых измерений имеет ассоциированные данные, определяющие положения упомянутых измерений в зависимости от времени, и для хранения данных рельефа местности, определяющих пространственное отклонение рельефа местности, снимаемого посредством упомянутой съемки потенциального поля; и
память программ, хранящую код управления процессором; и
процессор, присоединенный к упомянутой памяти данных и упомянутой памяти программ, чтобы загружать и реализовывать упомянутый код управления так, что когда код исполняется на процессоре, процессор выполнен с возможностью:
ввода упомянутых измеренных данных потенциального поля и упомянутых ассоциированных данных для упомянутых измерений;
ввода упомянутых данных рельефа местности;
определения поправочных данных временной области, которые должны применяться к упомянутым измеренным данным потенциального поля во временной области, причем определение содержит:
использование упомянутых данных рельефа местности и упомянутых ассоциированных данных, определяющих положения упомянутых измерений в зависимости от времени; и
выполнение компенсации в отношении полосы пропускания упомянутого средства измерений потенциального поля; и
корректировки упомянутых измеренных данных потенциального поля, определяющих упомянутый временной ряд измерений потенциального поля, с использованием упомянутых поправочных данных временной области для предоставления измеренных данных потенциального поля с поправкой на рельеф местности для упомянутого картографирования упомянутого поля.
14. Система обработки данных по п.13, в которой упомянутое определение упомянутых поправочных данных временной области включает в себя выполнение компенсации по отношению к полосе пропускания упомянутого средства измерения потенциального поля.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| RU 2009132490 А, 10.03.2011 | |||
| RU 2008134480 A, 27.02.2010 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОГО ПОЛЯ | 2002 |
|
RU2221263C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ ЗЕМЛЕТРЯСЕНИЯ | 2003 |
|
RU2254599C1 |

