Предлагаемое изобретение относится к электроприводам переменного тока с управлением посредством преобразователей частоты, а именно к режимам электрического торможения. Известен способ электрического торможения асинхронных двигателей с короткозамкнутым ротором, противовключением, которое осуществляется при команде «Стоп». При этом способе торможения происходит изменение чередования трех фаз переменного тока питания обмоток статора двигателя, что приводит к мгновенному изменению направления вращения магнитного поля статора, изменению направления электромагнитного момента и торможению двигателя и связанного с ним исполнительного механизма [1].
В описанном способе электрического торможения изменение чередования фаз питания обмоток статора происходит при номинальном напряжении, поэтому электромагнитный тормозной момент в начале торможения приблизительно равен по модулю моменту пусковому и возрастает в процессе торможения до максимального значения. Это обстоятельство приводит к ударным нагрузкам на двигатель и связанный с ним исполнительный механизм. По окончании процесса торможения электродвигатель по сигналу датчика скорости отключается от питающей сети. Недостатками описанного способа торможения является невозможность снижения ударной нагрузки на двигатель и связанный с ним исполнительный механизм, регулирование тормозного момента и задания интенсивности и времени торможения.
Предлагаемый способ позволяет оптимизировать торможение асинхронного двигателя с короткозамкнутым ротором и исключить ударные нагрузки в электроприводе в режиме торможения.
На фиг.1 представлена структурная схема реализации предлагаемого способа торможения, которая содержит следующие узлы и элементы: ПЛК - программируемый логический контроллер. ПЧ - преобразователь частоты; СУ - система управления ПЧ; М - асинхронный двигатель с короткозамкнутым ротором; ИДС - импульсный датчик скорости (энкодер); РМ - рабочая машина; Uз.n.- напряжение задания частоты вращения (двигательный режим); Uз.tT. - напряжения задания времени торможения; U3.U1,f1 - напряжение задания частоты и амплитуды выходного напряжения ПЧ; Uc - трехфазное переменное напряжение сети; fc - частота напряжения сети; U1,f1 - напряжение и частота на выходе ПЧ; Noc - кодовое значение выхода датчика скорости; n, M, Mc - частота вращения, вращающий момент и момент сопротивления на валу АД, соответственно; ИМ - исполнительный механизм; JM - момент инерции ИМ.
Способ оптимального торможения асинхронного двигателя с короткозамкнутым ротором осуществляется, согласно схеме, следующим образом: при команде «Стоп» с пульта управления электроприводом сигнал поступает на вход программируемого логического контролера ПЛК, который через систему управления СУ устанавливает напряжение U1 и частоту f1 на выходе преобразователя частоты ПЧ, равное нулю, и одновременно подается сигнал на изменение чередования фаз выходного напряжения U1. После этого регулятор скорости системы управления СУ обеспечивает плавное нарастание от нуля амплитуды и частоты выходного напряжения ПЧ, которое подается на обмотки статора двигателя М привода, что в свою очередь обеспечивает торможение электропривода без ударных нагрузок на двигатель и связанный с ним исполнительный механизм. Заданное время и интенсивность торможения устанавливается с помощью ПЛК. После окончания процесса торможения по сигналу датчика скорости ИДС происходит запирание ПЧ.
Структурная схема, обеспечивающая двигательный и предлагаемый режим электрического торможения электропривода реализуется на элементах общепромышленного применения, выполняющих стандартные функции. Алгоритм режима электрического торможения задается промышленным логическим контроллером.
Таким образом, предлагаемый способ торможения асинхронного двигателя с короткозамкнутым ротором обеспечивается в электроприводе переменного тока с частотным регулированием скорости без применения специализированных тормозных блоков или элементов, а за счет изменения алгоритма работы элементов электропривода.
Источники информации
1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-5 изд., доп. и перераб. - М.: Энергоиздат, 1981 г. - 576 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| РЕВЕРСИВНАЯ СХЕМА УПРАВЛЕНИЯ САМОТОРМОЗЯЩЕГОСЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ СО СМЕЩАЮЩИМСЯ КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2022 |
|
RU2793340C1 |
| РЕВЕРСИВНАЯ СХЕМА УПРАВЛЕНИЯ САМОТОРМОЗЯЩЕГОСЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ СО СМЕЩАЮЩИМСЯ КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2022 |
|
RU2796585C1 |
| Реверсивная схема управления самотормозящегося асинхронного электродвигателя со смещающимся короткозамкнутым ротором | 2024 |
|
RU2827651C1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА | 1992 |
|
RU2035121C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1989 |
|
SU1642576A2 |
Изобретение относится к области электротехники и может быть использовано в автоматизированном электроприводе переменного тока с преобразователями частоты. Техническим результатом является оптимизация торможения асинхронного двигателя с короткозамкнутым ротором и исключение ударных нагрузок. Способ оптимального торможения асинхронного двигателя с короткозамкнутым ротором противовключением осуществляется путем заданного алгоритма работы преобразователя частоты, что и обеспечивает заданное значение тормозного момента и времени торможения без динамических перегрузок двигателя и связанного с ним исполнительного механизма. 1 ил.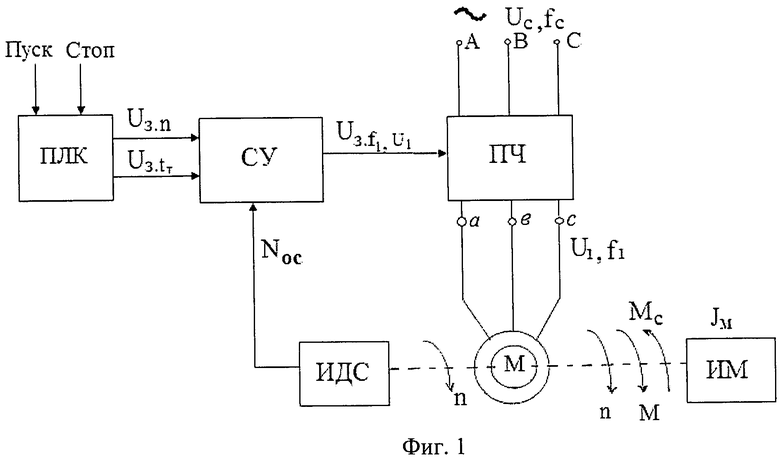
Способ оптимального торможения асинхронного двигателя с короткозамкнутым ротором, заключающийся в том, что торможение двигателя осуществляется по команде «Стоп» в режиме противовключения, отличающийся тем, что при команде «Стоп» посредством системы управления преобразователем частоты одновременно устанавливаются амплитуда и частота напряжения на обмотках статора двигателя равными нулю, после чего осуществляется изменение чередования фаз питающего напряжения и плавное нарастание амплитуды и частоты, что обеспечивает торможение двигателя и связанного с ним исполнительного механизма без динамических перегрузок за заданное время.
| СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА | 1992 |
|
RU2035121C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1934 |
|
SU38329A1 |
| Устройство для испытания ударных пневматических инструментов | 1933 |
|
SU49395A1 |
| Способ шлифования фасок | 1989 |
|
SU1685690A1 |
| US 20100207554 A1, 19.08.2010. | |||

