Изобретение относится к области железнодорожного транспорта, а именно к локомотивным устройствам управления движением и обеспечения безопасности движения поездов и может быть использовано для оптимизации движения всех поездов, находящихся одновременно на данном железнодорожном участке, повышения пропускной способности и снижения эксплуатационных расходов на движение поездов при сбоях в графике.
Известен способ регулирования скорости движения поезда, включающий определение максимально допустимой скорости движения поезда по участку, задаваемой при составлении режимной карты, в любой точке участка с учетом его плана и профиля пути, распределения масс вагонов по длине состава и тормозных характеристик поезда, определение скорости, при которой продольные динамические усилия, возникающие в поезде в случае его экстренного (интенсивного) торможения, не приводят к превышению продольными динамическими усилиями в поезде их допустимых значений и которую считают максимально допустимой, при этом при определении максимально допустимой скорости корректируют заданную кривую ограничения скорости движения поезда с помощью программно-аппаратного комплекса, снабженного программным модулем, который встраивается в существующие системы расчета и задания кривой ограничения скорости движения поезда по участку, определяющего продольные динамические усилия в поезде, которые возникают в случае экстренного торможения, сравнивают значение текущей скорости со значением, задаваемым скорректированной кривой ограничения скорости, и, в случае превышения этого значения, осуществляют принудительное снижение текущей скорости (RU 2265874, G05B 17/00, B60L 3/00, 10.12.05).
Недостатком известного способа является ограниченность области применения, обусловленная неполным учетом всех факторов, влияющих на выбор максимальной скорости движения поезда.
Наиболее близкими к заявляемому способу и устройству для его осуществления является выбранные в качестве прототипа способ регулирования скорости движения по участку железной дороги и использующая его система (RU 2355596, B61L 27/00, 20.05.09).
Известный способ включает контроль скорости движения функционально независимыми подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, синхронное сравнение измеряемой текущей скорости поезда с заданной для данной координаты местонахождения поезда, пороговым значением допускаемой скорости для каждой из подсистем и, при достижении скоростью поезда заданного значения, перевод управляющей системы в режим по поддержанию этого значения скорости, пороговые значения допускаемой скорости, для каждой подсистемы хранят в электронной базе данных и задают из условий:
V1<V2<V3<VB<=Vп,
где V1 - пороговое значение допускаемой скорости для подсистемы автоведения поезда;
V2 - пороговое значение допускаемой скорости для подсистемы автоматического управления служебным торможением;
V3 - пороговое значение допускаемой скорости для подсистемы контроля безопасности движения;
Vв, Vп - установленные для данной координаты местонахождения поезда предельные значения допускаемой скорости соответственно по временным и постоянным ограничениям, включая ограничения скорости по показаниям светофоров
V2>=V1+dV1+dV2;
V3>=V2+dV2+dV3, где dV1, dV2, dV3 - соответственно значения погрешности измерения текущей скорости движения поезда подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения.
Каждая подсистема снабжена электронной базой данных собственных пороговых значений допускаемой скорости по координате движения поезда и имеет возможность взаимодействия с другими подсистемами и их узлами через CAN интерфейс.
Реализующая этот способ система регулирования скорости движения по участку железной дороги содержит подсистемы автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, систему датчиков пути и скорости движения, приемные устройства автоматической локомотивной сигнализации и спутниковой навигационной системы, устройство выявления неисправностей оборудования локомотива, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива, устройство контроля бодрствования машиниста, устройство визуализации информации машинисту и устройство регистрации информации с энергонезависимой памятью, подсистемы и функциональные блоки соединены общесистемным CAN-интерфейсом, при этом каждая подсистема снабжена электронной базой данных собственных пороговых значений допускаемой скорости по координате движения поезда, а устройство контроля бодрствования машиниста выполнено интерактивным с узлами физиологического контроля и контроля управляющих действий машиниста по ведению поезда с возможностью воздействия через общесистемный CAN-интерфейс на подсистему автоматического управления служебным торможением.
Недостатком известного способа регулирования скорости движения по участку железной дороги, реализуемого соответствующим устройством, является выбор скорости движения поезда без учета возможностей оптимизации движения всех поездов находящихся одновременно на данном железнодорожном участке. Это приводит к снижению пропускной способности железнодорожного участка в целом и к росту эксплуатационных расходов на движение поездов при сбоях в графике, когда взаимная связь в движении некоторых поездов на участке усиливается из-за их чрезмерного сближения. Например, при приближении поезда к светофору с желтым сигнальным показанием, на участках с системой АЛСН числового кода, согласно известному способу, при отсутствии ограничений по V1, V2, Vв и Vп, поезд может двигаться с максимальной скоростью V3<=Vж. В условиях сбоя в графике статистически более выгодным является движение поезда с меньшей скоростью, но не менее некоторой минимальной. При движении с этой некоторой оптимальной скоростью исключается излишняя неравномерность в движении данного поезда и уменьшается неравномерность движения следующих за ним поездов. Аналогично, при движении поезда к светофору с красным сигнальным показанием под код КЖ системы АЛСН числового кода существует статистически оптимальная скорость.
Технический результат изобретения заключается в повышении пропускной способности участка железной дороги и снижении эксплуатационных расходов на движение поездов при сбоях в графике.
Технический результат достигается тем, что в способе регулирования скорости движения по участку железной дороги, включающем контроль скорости движения функционально независимыми подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, синхронное сравнение измеряемой текущей скорости поезда с заданным для данной координаты местонахождения поезда пороговым значением допускаемой скорости для каждой из подсистем при достижении заданного значения скорости поезда осуществляют перевод управляющей системы в режим по поддержанию этого значения скорости, при этом пороговые значения допускаемой скорости, для каждой подсистемы, хранят в электронной базе и задают из следующих условий:
V1<V2<V3<VB<=Vп,
где V1 - пороговое значение допускаемой скорости для подсистемы автоведения поезда;
V2 - пороговое значение допускаемой скорости для подсистемы автоматического управления служебным торможением;
V3 - пороговое значение допускаемой скорости для подсистемы контроля безопасности движения;
Vв, Vп - установленные для данной координаты местонахождения поезда предельные значения допускаемой скорости, соответственно, по временным и постоянным ограничениям, включая ограничения скорости по показаниям светофоров;
V2>=V1+dV1+dV2;
V3>=V2+dV2+dV3, где dV1, dV2, dV3 - соответственно значения погрешностей измерения текущей скорости движения поезда подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, согласно изобретению в условиях сбоев в графике движения данного поезда и/или впереди идущих поездов для каждого блок - участка данного участка железной дороги определяют физическим и математическим моделированием, с учетом длины, плана и профиля пути блок - участков, значения скоростей движения поезда на желтый и на красный сигнальные огни, движение с которыми статистически оптимизирует параметры движения данного поезда и движения остальных поездов, следующих за ним по данному участку железной дороги, для каждого поезда скорости движения на желтый и на красный сигнальные огни светофоров устанавливают индивидуально, с учетом его длины и тормозных характеристик.
Система регулирования скорости движения по участку железной дороги, реализующая предлагаемый способ, содержит связанные между собой радиоканалом стационарный и локомотивный приемопередатчики, автоматизированное рабочее место поездного диспетчера, сигнальный вход-выход стационарного приемопередатчика подключен к компьютеру автоматизированного рабочего места поездного диспетчера, сигнальный вход-выход локомотивного приемопередатчика подключен к общесистемному CAN-интерфейсу, к которому подключены также подсистемы автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения с электронными базами данных собственных пороговых значений допускаемой скорости по координате движения поезда, блоки датчиков пути и скорости движения, приемные элементы автоматической локомотивной сигнализации и спутниковой навигационной системы, блок выявления неисправностей оборудования локомотива, блок датчиков давления в основных агрегатах пневматической тормозной системы локомотива, блок визуализации информации машинисту и блок регистрации информации с энергонезависимой памятью, интерактивный блок контроля бодрствования машиниста с узлами физиологического контроля и контроля управляющих действий машиниста по ведению поезда.
На чертеже приведена схема системы для регулирования скорости движения по участку железной дороги, реализующей заявляемый способ.
Система регулирования скорости движения по участку железной дороги содержит на каждом из локомотивов 1 соединенные общесистемным CAN-интерфейсом 2 подсистемы автоведения поезда 3, автоматического управления служебным торможением 4 и контроля безопасности движения 5 с электронными базами данных собственных пороговых значений допускаемой скорости по координате движения поезда, блоки 6 датчиков пути и скорости движения, приемные элементы автоматической локомотивной сигнализации 7 и спутниковой навигационной системы 8, блок 9 выявления неисправностей оборудования локомотива, блок 10 датчиков давления в основных агрегатах пневматической тормозной системы локомотива 1, блок 11 визуализации информации машинисту и блок 12 регистрации информации с энергонезависимой памятью, интерактивный блок 13 контроля бодрствования машиниста с узлами физиологического контроля и контроля управляющих действий машиниста по ведению поезда и локомотивный приемопередатчик 14, связанный радиоканалом со стационарным приемопередатчиком 15, сигнальный вход-выход которого подключен к компьютеру 16 автоматизированного рабочего места поездного диспетчера на центральном посту 17 диспетчерского управления.
Способ регулирования скорости движения по участку железной дороги реализуется предлагаемой системой следующим образом.
В процессе движения поезда в общесистемный CAN-интерфейс 2 непрерывно поступают данные от блока 6 датчиков пути и скорости движения. При поступлении этих данных в подсистемах автоведения поезда 3, автоматического управления служебным торможением 4 и контроля безопасности движения 5 определяется фактическая скорость движения, а также путь, пройденный с момента начала движения, на основании чего производится координатная привязка к заложенной в подсистемы 3-5 электронной карте участка движения, и определяется текущая координата нахождения поезда. С помощью спутниковой навигационной системы 8 проводится дополнительное уточнение координаты нахождения поезда. В систему также поступают непрерывно данные от блока 10 датчиков давления в основных агрегатах пневматической тормозной системы локомотива 1 и приемных элементов автоматической локомотивной сигнализации 7, на основании которых системой выбираются режимы управления поездом. Каждая из подсистем 3-5 производит анализ входящей информации, обработку в соответствии с заложенными алгоритмами и выработку управляющих воздействий на тормозные устройства локомотива 1 и его тяговое оборудование. Согласование алгоритмов работы подсистем 3-5 исключает одновременную передачу управляющих команд от различных подсистем. Команды на управление тяговым током (набор и сброс позиций главного контроллера) выдает только подсистема 3 автоведения поезда. При необходимости снижения скорости торможением, например, при достижении предельно допустимого значения скорости, подсистема 3 автоведения поезда инициирует управляющее воздействие на локомотивную тормозную систему, осуществляющую служебное торможение. При отказе системы 3 автоведения управление служебным торможением перехватывается подсистемой 4 автоматического управления служебным торможением. При недостаточной эффективности служебного торможения процесс управления торможением перехватывается подсистемой 5 контроля безопасности движения, в результате управляющего воздействия которой инициируется экстренное торможение поезда. Информация, необходимая машинисту для ведения поезда, отображается машинисту посредством интерактивного блока 11 визуализации информации. В процессе работы системы автоматически осуществляется выявление опасных неисправностей тягового, тормозного и вспомогательного оборудования локомотива 1, железнодорожного пути и устройств интервального регулирования, которые могут привести к нарушениям безопасности движения. Блок 9 выявления неисправностей оборудования локомотива 1 информирует машиниста путем выдачи сообщений на блок 11 визуализации информации машинисту о наступлении неисправностей или режимов работы оборудования, угрожающих безопасности движения поезда, на основании чего машинист может своевременно принять меры по предотвращению негативных последствий. Интерактивный блок 13 контроля бодрствования машиниста с узлами физиологического контроля и контроля управляющих действий машиниста по ведению поезда, производит физиологический контроль бодрствования машиниста. Например, при снижении уровня кожно-гальванической реакции машиниста, но активных действиях по управлению поездом, а также при отсутствии действий, но высоком уровне кожно-гальванической реакции, блок 13 не выдает запросов на подтверждение бодрствования. В случае низкого уровня кожно-гальванической реакции и отсутствии управляющих действий блок 13 выдает запрос на подтверждение бодрствования, при отсутствии ответной реакции на этот запрос - инициирует служебное торможение поезда.
Взаимная координация работы подсистем автоведения 3, автоматического управления служебным торможением 4 и контроля безопасности движения 5 обеспечивается разнесением установочных пороговых значений допускаемой скорости движения поезда по постоянным Vп и временным Vв ограничениям. Построение баз данных предусматривает такое разнесение пороговых значений их допускаемых скоростей, чтобы для каждой координаты движения поезда выполнялось следующее соотношение:
V1<V2<V3<Vв≤Vп,
где:
V1 - пороговое значение допускаемой скорости в подсистеме 3 автоведения, формируемое по базе данных этой подсистемы с учетом постоянных, временных ограничений скорости, а также с учетом ограничений скорости по не зеленым показаниям автоматической локомотивной сигнализации и ограничений скорости, соответствующим текущим координатам траекторий разгона или торможения, которые выстраиваются подсистемой 3 автоведения при переходе с одной допускаемой скорости на другую или при осуществлении прицельной остановки;
V2 - пороговое значение допускаемой скорости в подсистеме 4 автоматического управления служебным торможением, формируемое по базе данных этой подсистемы с учетом постоянных ограничений скорости, а также с учетом ограничений скорости по не зеленым показаниям автоматической локомотивной сигнализации и ограничений скорости, соответствующим текущим координатам траекторий торможения, которые выстраиваются подсистемой при переходе с одной допускаемой скорости на другую или при осуществлении прицельной остановки;
V3 - пороговое значение допускаемой скорости в подсистеме 5 контроля безопасности движения, формируемое по базе данных этой подсистемы с учетом постоянных ограничений скорости, а также с учетом ограничений скорости по не зеленым показаниям автоматической локомотивной сигнализации и ограничений скорости, соответствующим текущим координатам траектории торможения, которая выстраивается подсистемой при переходе с одной допускаемой скорости на другую или при осуществлении остановки.
Vв, Vп - установленные для данной координаты местонахождения поезда предельные значения допускаемой скорости движения поезда, соответственно, по временным и постоянным ограничениям, включая ограничения скорости по показаниям светофоров.
При этом
V2≥V1+dV1+dV2;
V3≥V2+dV2+dV3,
где dV1, dV2, dV3 - соответственно, значения погрешности измерения текущей скорости движения поезда подсистемами автоведения 3 поезда, автоматического управления 4 служебным торможением и контроля безопасности 5 движения поезда.
При практической реализации установлены следующие зависимости пороговых значений допускаемых скоростей:
V2=V1+2 км/ч;
V3=V1+5 км/ч.
Соотношения справедливы как при движении с поддержанием постоянной скорости, так и при переходе с одной скорости на другую, включая скорость торможения. Таким образом, при исправной работе подсистем 3-5 система обеспечивает независимое построение траекторий допускаемых скоростей во всех режимах движения поезда. При исправной работе подсистем 3-5 востребованным является то значение допускаемой скорости, которое является наименьшим, то есть V1. Пока исправная подсистема 3 автоведения обеспечивает не превышение допускаемой скорости движения, система регулирования скорости движения по участку железной дороги не воспринимает посредством других подсистем повышение скорости, следовательно, состояния опасного отказа не возникает.
Поскольку подсистемы с позиций не превышения допускаемой скорости работают независимо, то данное рассуждение остается в силе и по отношению к другим подсистемам. Например, если при исправной работе подсистемы 4 автоматического управления служебным торможением откажут подсистемы 3 и 5, непревышение допускаемой скорости будет обеспечиваться именно этой подсистемой.
Возможность возникновения опасного отказа в системе регулирования скорости движения по участку железной дороги по превышению допускаемой скорости движения возможна только в том случае, когда в течение рассматриваемого интервала времени в любой последовательности произошел отказ всех трех подсистем. Поскольку вероятность такого события равна вероятности одновременного наступления трех событий, то есть произведению вероятностей наступления каждого из них, то она существенно меньше наименьшего из этих значений, каковым является значение вероятности отказа подсистемы контроля безопасности.
Перед выходом поезда на маршрут в электронные базы данных подсистем автоведения поезда 3, автоматического управления служебным торможением 4 и контроля безопасности движения 5 вводят или активизируют уже имеющиеся в ней пороговые значения допускаемых скоростей для каждой из подсистем управления и также вводят значения оптимальных скоростей приближения к светофору с желтым сигнальным показанием и приближения к светофору с красным сигнальным показанием скоростей, определенные компьютером 16 автоматизированного рабочего места поездного диспетчера посредством физического и математического моделирования, для каждого блок- участка данного участка железной дороги с уточнением их на основе длины и тормозных характеристик конкретного поезда. Моделирование в простейшем случае сводится к подбору оптимальных скоростей приближения к светофору с желтым сигнальным показанием и приближения к светофору с красным сигнальным показанием методом последовательных приближений с некоторым шагом приближения.
Например, моделирование для поезда с малой длиной и весом показывает, что он должен двигаться быстрее, чем средний поезд, так как его эксплуатационные расходы на торможение и разгон меньше, чем у идущих вслед за ним в среднем более длинных и тяжеловесных поездов. При движении упомянутого поезда быстрее для последующих поездов имеется больше свободного пространства, позволяющего достичь большей равномерности и скорости их движения. Соответственно, индивидуальные значения оптимальных скоростей приближения к светофору с желтым сигнальным показанием и приближения к светофору с красным сигнальным показанием на каждом блок-участке для поезда с малой длиной и весом устанавливаются больше их средней статистической величины.
Во время движения при получении от диспетчера или машиниста команды о переходе в режим движения, предусмотренный при сбоях в графике, локомотивные устройства начинают, при движении поезда на желтый и красный сигнальные огни светофоров и отсутствии других ограничений, накладываемых подсистемами автоведения поезда 3, автоматического управления служебным торможением 4 и контроля безопасности движения 5, автоматически использовать для регулирования движения значения оптимальных скоростей приближения к светофору с желтым сигнальным показанием и приближения к светофору с красным сигнальным показанием
В дальнейшем, когда в компьютер 16 автоматизированного рабочего места поездного диспетчера поступает откорректированный оптимальный график для сложившейся поездной ситуации и диспетчер начинает активные действия по восстановлению графика, он имеет возможность через приемопередатчик 15 центрального поста 17 диспетчерского управления, радиоканал и локомотивный приемопередатчик 14 каждого из локомотивов 1 передать команды, корректирующие используемые по умолчанию значения оптимальных скоростей приближения к светофору с желтым сигнальным показанием и приближения к светофору с красным сигнальным показанием или команды, отменяющие эти режимы ведения для отдельных, или для всех поездов на участке.
Этим достигаются увеличение степени использования пропускной способности загруженных участков сети железных дорог с обеспечением точного выполнения графика движения, при необходимости энергооптимального нагона в рамках допускаемых значений скорости, при одновременном безопасном выполнении системой самодиагностики и интеллектуального контроля бодрствования машиниста и статистически гарантированные в среднем повышение пропускной способности и снижение эксплуатационных расходов для данного поезда и остальных поездов, следующих по данному участку железной дороги в условиях сбоев в графике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2429152C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446070C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446071C1 |
| СПОСОБ ОРГАНИЗАЦИИ ВИЗУАЛЬНОЙ СПРАВОЧНО-ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ МАШИНИСТА ПОЕЗДА | 2010 |
|
RU2494905C2 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДОВ НА ОДНОПУТНОЙ ЖЕЛЕЗНОЙ ДОРОГЕ | 2008 |
|
RU2395423C1 |
| Система управления распределенная автоматизированная для организации интервального регулирования движения поездов | 2021 |
|
RU2806570C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
Изобретение относится к локомотивным устройствам управления движением поездов. Способ регулирования скорости движения по участку железной дороги включает контроль скорости движения поезда и автоматического управления служебным торможением, а также сравнение текущей скорости поезда с заданным пороговым значением. При достижении заданного значения скорости переводят управляющую систему в режим по поддержанию этого значения скорости. В условиях сбоев в графике движения поездов определяют физическим и математическим моделированием, с учетом длины, плана и профиля пути блок-участков, значения скоростей движения поезда на желтый и на красный сигнальные огни. Система для реализации способа содержит соединенные с CAN-интерфейсом подсистемы автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, блоки датчиков пути и скорости движения, приемные элементы автоматической локомотивной сигнализации и спутниковой навигационной системы. Также в систему введено автоматизированное рабочее место поездного диспетчера. Стационарный и локомотивный приемопередатчики связанны между собой радиоканалом. Сигнальный вход-выход локомотивного приемопередатчика подключен к общесистемному CAN-интерфейсу. Достигается повышение пропускной способности. 2 н.п. ф-лы, 1 ил.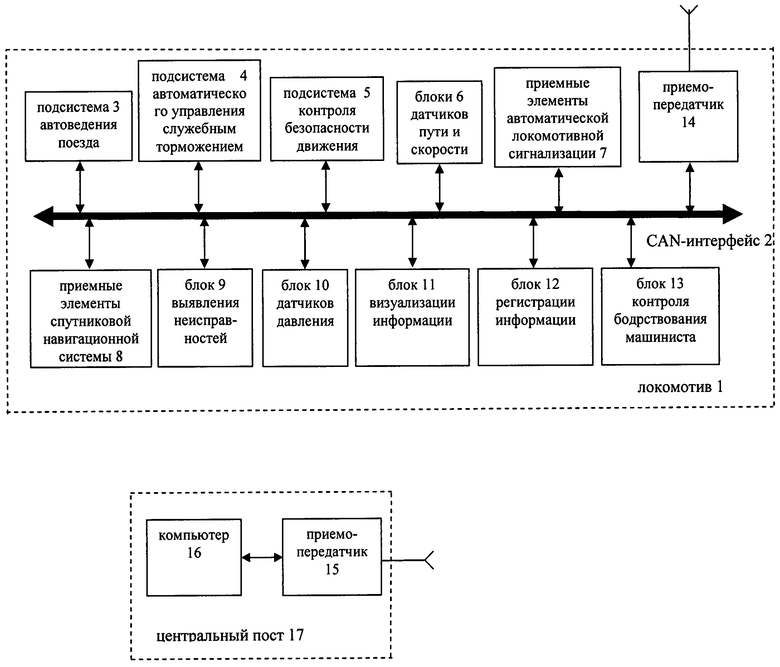
1. Способ регулирования скорости движения по участку железной дороги, включающий контроль скорости движения функционально независимыми подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, синхронное сравнение измеряемой текущей скорости поезда с заданным для данной координаты местонахождения поезда пороговым значением допускаемой скорости для каждой из подсистем, при достижении заданного значения скоростью поезда осуществляют перевод управляющей системы в режим по поддержанию этого значения скорости, при этом пороговые значения допускаемой скорости, для каждой подсистемы, хранят в электронной базе и задают из следующих условий:
V1<V2<V3<Vв<=Vп,
где V1 - пороговое значение допускаемой скорости для подсистемы автоведения поезда;
V2 - пороговое значение допускаемой скорости для подсистемы автоматического управления служебным торможением;
V3 - пороговое значение допускаемой скорости для подсистемы контроля безопасности движения;
Vв, Vп - установленные для данной координаты местонахождения поезда предельные значения допускаемой скорости, соответственно, по временным и постоянным ограничениям, включая ограничения скорости по показаниям светофоров;
V2>=V1+dV1+dV2;
V3>=V2+dV2+dV3, где dV1, dV2, dV3 - соответственно значения погрешностей измерения текущей скорости движения поезда подсистемами автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, отличающийся тем, что в условиях сбоев в графике движения данного поезда и/или впереди идущих поездов для каждого блок-участка данного участка железной дороги определяют физическим и математическим моделированием, с учетом длины, плана и профиля пути блок-участков, значения скоростей движения поезда на желтый и на красный сигнальные огни, движение с которыми статистически оптимизирует параметры движения данного поезда и движения остальных поездов, следующих за ним по данному участку железной дороги, для каждого поезда скорости движения на желтый и на красный сигнальные огни светофоров устанавливают индивидуально, с учетом его длины и тормозных характеристик.
2. Система регулирования скорости движения по участку железной дороги, содержащая соединенные общесистемным CAN-интерфейсом подсистемы автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения с электронными базами данных собственных пороговых значений допускаемой скорости по координате движения поезда, блоки датчиков пути и скорости движения, приемные элементы автоматической локомотивной сигнализации и спутниковой навигационной системы, блок выявления неисправностей оборудования локомотива, блок датчиков давления в основных агрегатах пневматической тормозной системы локомотива, блок визуализации информации машинисту, блок регистрации информации с энергонезависимой памятью, интерактивный блок контроля бодрствования машиниста с узлами физиологического контроля и контроля управляющих действий машиниста по ведению поезда, отличающаяся тем, что в нее введены автоматизированное рабочее место поездного диспетчера, стационарный и локомотивный приемопередатчики, связанные между собой радиоканалом, сигнальный вход-выход стационарного приемопередатчика подключен к компьютеру автоматизированного рабочего места поездного диспетчера, сигнальный вход-выход локомотивного приемопередатчика подключен к общесистемному CAN-интерфейсу.
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СПОСОБ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ ПОЕЗДОПОТОКА ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ | 2002 |
|
RU2207279C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ СКОРОСТИ И СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА ПО УЧАСТКУ ПУТИ | 2003 |
|
RU2265874C2 |
| Устройство для определения скорости поезда на участке торможения | 1989 |
|
SU1791246A1 |
| JP 2010095217 A, 30.04.2010. | |||

