Изобретение относится к области создания нетрадиционных аппаратов для перемещения в газовых и (или) жидких средах, в том числе дистанционно управляемых разведывательного назначения.
Известен микросистемный летательный аппарат, содержащий корпус с функциональными агрегатами и машущими движителями в виде тонких крыльев [1].
Ввиду сложности аэродинамических расчетов и приводных механизмов реализация аппарата данного типа представляет значительную трудность.
Известен также микросистемный летательный аппарат, содержащий плоский корпус, электрический привод, электрический источник энергии и винтовой движитель [2].
Однако указанный движитель для данного аппарата имеет низкие эффективность и надежность.
Наиболее близким к заявляемой конструкции по технической сущности и достигаемому результату является микросистемный летательный аппарат [3] (прототип), содержащий корпус с функциональными агрегатами и машущими движителями, электрический источник энергии, электронный блок для функционального управления аппаратом, отсек с датчиками информации, отсек для полезного груза, захват для микроинструмента, вертикальное и горизонтальное оперения, микроантенну и микроприемник для радиосвязи.
Однако этот летательный аппарат имеет низкие летные характеристики: маневренность, управляемость и надежность работы.
Задачей, на решение которой направлено изобретение, является расширение функциональных возможностей и летных характеристик микросистемного летательного аппарата.
Технический результат - повышение маневренности и надежности. Этот технический результат достигается тем, что в микростстемный летательный аппарат, содержащий корпус с функциональными агрегатами и раздельно управляемыми лопастными машущими движителями, электрический источник энергии, электронный блок для функционального управления аппаратом, отсек с датчиками информации, отсек для полезного груза, захват для микроинструмента, вертикальное и горизонтальное оперения, микроантенну и микроприемник для радиосвязи, введен электростатический привод машущих движителей, первый и второй машущие движители выполнены антисимметричными и установлены справа и слева относительно продольной оси корпуса аппарата, каждый машущий движитель установлен шарнирно с помощью гофрированной диафрагмы в специальном герметичном кармане, заполненном жидкостью с высокой диэлектрической проницаемостью, машущий движитель состоит из двух частей, одна часть машущего движителя расположена с внешней стороны герметичного кармана и является рабочей, вторая часть размещена внутри герметичного кармана, выполнена в виде плоского проводящего электрода и является подвижной частью электростатического привода, неподвижный электрод электростатического привода размещен относительно подвижного с зазором и параллельно подвижному, для первого и второго машущих движителей неподвижный электрод является общим, введен преобразователь низкочастотных электрических колебаний, первый и второй выходы которого соединены электрически с подвижными и неподвижными электродами привода первого и второго машущих движителей, введен магнитоэлектрический привод машущими движителями, в котором часть машущего движителя, размещенная внутри герметичного кармана, служит рычагом, на конце которого закреплен постоянный магнит, магнитопровод с внутренней обмоткой закреплен в герметичной камере неподвижно, постоянный магнит входит свободно внутрь обмотки, выводы обмотки соединены электрически с соответствующими выводами преобразователя низкочастотных электрических колебаний первого и второго машущих движителей.
Предлагаемое устройство позволит повысить маневренность, т.к. придание движителям двух режимов - машущего и вибрирующего - обеспечивает энергичное изменение положения аппарата в пространстве и движение его в любом направлении, в том числе зависание; герметичность отсеков и отсутствие вращающихся узлов способствует повышению надежности аппарата; масштабирование летательного аппарата расширит зону применения и может быть эффективно использовано для создания беспилотных летательных аппаратов вертикального взлета и посадки, а также высокоманевренных подводных аппаратов (батискафов).
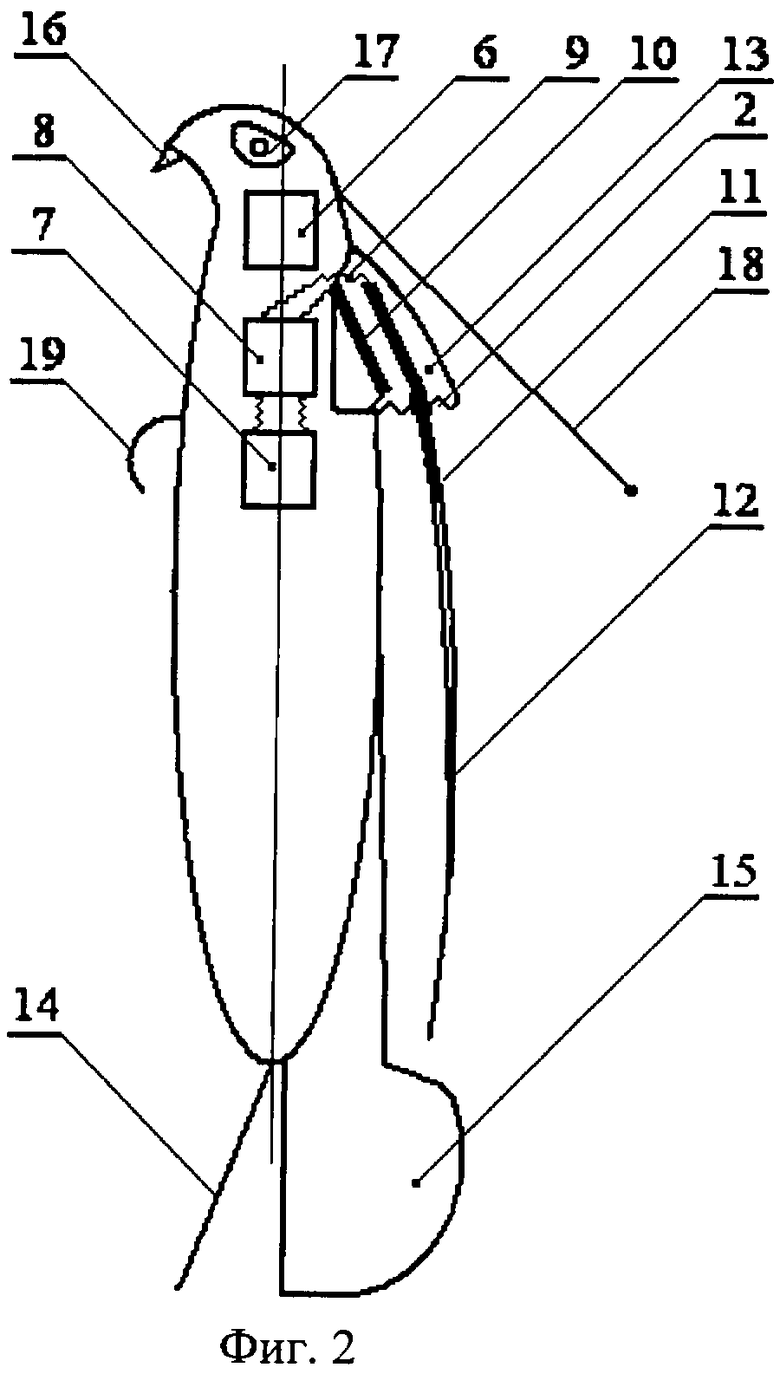
Изобретение пояснено чертежами, где на фиг.1 приведен его вид в плане, а на фиг.2 - боковой вид предлагаемого летательного аппарата. Микросистемный летательный аппарат содержит первый и второй машущие движители 1, закрепленные с помощью гофрированной диафрагмы 2 в герметичном кармане 3, жестко связанном с корпусом 4. В головной части корпуса 4 расположен отсек с датчиками информации 5 и отсек для полезного груза 6. Внутри корпуса 4 размещен отсек 7 с электрическим источником энергии и отсек с электронным блоком 8 для функционального управления аппаратом. Электронный блок 8 соединен электрическими проводниками 9 с подвижным и неподвижным электродами 10 электростатического привода, причем подвижный электрод электростатического привода связан с жесткой частью 11 рабочей лопасти 12 машущего движителя, и расположены по разные стороны гофрированной диафрагмы 2. Внутренняя полость 13 герметичного кармана 3 заполнена жидкостью с высокой диэлектрической проницаемостью, например дистиллированной водой. Микросистемный летательный аппарат снабжен горизонтальным 14 и вертикальным 15 оперениями для стабилизации полетов в пространстве. С целью выполнения элементарных операций -
подрезка, сверление, магнитное прилипание, поджиг и др. - аппарат снабжен механическим захватом 16 для крепления микроинструмента. Аппарат снабжен датчиком движения 17, а также антенной 18 для телерадиосвязи и пружинным шасси 19. Введен магнитоэлектрический привод машущих движителей 1, в котором часть машущего движителя, размещенная внутри герметичного кармана 3, служит рычагом, на конце которого закреплен постоянный магнит, магнитопровод с внутренней обмоткой закреплен в герметичной камере неподвижно, постоянный магнит входит свободно внутрь обмотки, выводы обмотки соединены электрически с соответствующими выводами преобразователя низкочастотных электрических колебаний первого и второго машущих движителей.
Рассмотрим принцип действия микросистемного летательного аппарата для следующих режимов.
1. Взлет в штатном режиме, в этом случае в предстартовом состоянии аппарат опирается на пружинные шасси 19 и горизонтальное оперение 14.
2. Управляемый полет в пространстве в воздушной или в водной среде.
3. Взлет в нештатном режиме, в этом случае в предстартовом состоянии аппарат находится в произвольном положении, например брошен в придорожной луже.
4. Выполнение полезного задания и возвращение на базу.
Под действием суммарной тяги машущих движителей 1 аппарат может стартовать под наклоном или вертикально. Управление аппаратом и его стабилизация осуществляются программно путем изменения величины или направления тяги отдельных машущих движителей 1. Стабилизации аппарата в пространстве способствует оперение 14 и 15. Раздельное управление первым и вторым движителями и их тягой придает аппарату маневренность в любом направлении, не исключая вертикальных подъема и опускания, а также «зависания». Для осуществления «зависания» движитель переводится электронным блоком 8 функционального управления аппаратом в режим вибрации. Вибрация движителя отличается от взмахов значительно меньшей амплитудой и повышенной частотой.
В нештатном режиме аппарат поочередно включает первый и второй движители до тех пор, пока не сравняется потребление тока в первом и втором движителях. Этот момент в системе управления свидетельствует о том, что ни тот и ни другой движители не касаются посторонних твердых помех. После этого аппарат переходит в штатный режим.
Выполнение полезного задания осуществляется по команде в программе или по сигналу радиоуправления. Заявляемое устройство является многофункциональным, поэтому специализация задания определяется конкретным назначением и соответствующей конкретной программой, которая вводится в память электронного блока функционального управления перед запуском аппарата. Одним из простых заданий является, например, сброс содержимого камеры 6. Более сложным заданием является посылка аппарата вдогон какого-либо транспортного средства по датчику движения 17, размещенному в отсеке с датчиками информации.
5. После выполнения задания в электронном блоке 8 функционального управления включается магнитный пеленгатор, ориентирующий аппарат головной частью всегда в сторону базы.
Отмеченное выше в описании позволяет заключить, что технический результат изобретения достигнут.
Источники информации
1. Махолет. Журнал «Техника молодежи», - №9, 1978 г., стр.58).
2. Серохвостов С.В. Пути и технологии миниатюризации микролетательных аппаратов. - М.: Журнал «Нано- и микросистемная техника» №8, 2009, стр.43-48.
3. Бауэрс П. Летательные аппараты нетрадиционных схем. - М.: Изд-во «Мир», 1991, стр.262.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2469913C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА | 2018 |
|
RU2680678C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2011 |
|
RU2462392C1 |
| Барражирующий боеприпас | 2023 |
|
RU2818171C1 |
| МИКРОАКСЕЛЕРОМЕТР | 2012 |
|
RU2490650C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| "Аэростатический летательный аппарат "Вакула" | 1990 |
|
SU1816708A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
Изобретение относится к области создания нетрадиционных аппаратов для перемещения в газовых или жидких средах, в том числе дистанционно управляемых разведывательного назначения. Микросистемный летательный аппарат содержит корпус с функциональными агрегатами и раздельно управляемыми лопастными машущими движителями, электрический источник энергии, электронный блок для функционального управления аппаратом, отсек для полезного груза, захват для микроинструмента, вертикальное и горизонтальное оперения, микроантенну и микроприемник для радиосвязи, электростатический привод машущих движителей, устройство управления летательным аппаратом, преобразователь низкочастотных электрических колебаний, магнитоэлектрический привод машущих движителей. Машущий движитель состоит из двух частей. Одна часть машущего движителя расположена с внешней стороны герметичного кармана и является рабочей. Вторая часть размещена внутри герметичного кармана и является подвижной частью электростатического привода. Технический результат заключается в повышении маневренности и надежности. 2 ил.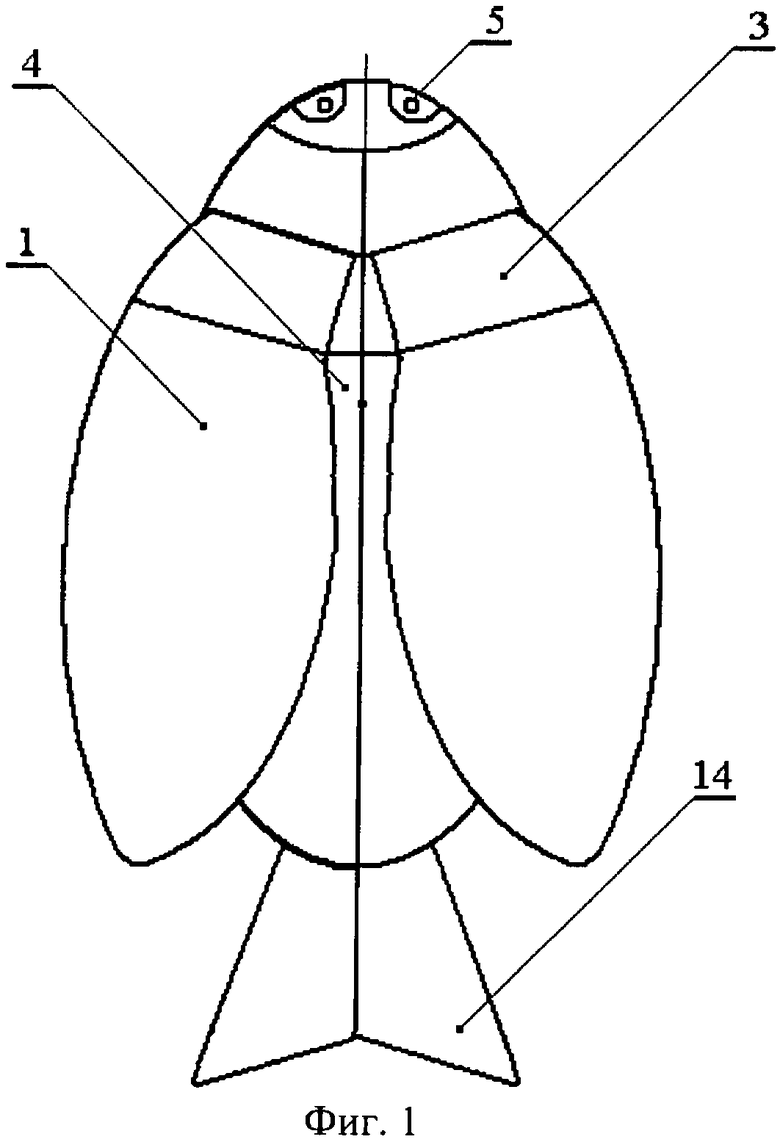
Микросистемный летательный аппарат, содержащий корпус с функциональными агрегатами и раздельно управляемыми лопастными машущими движителями, электрический источник энергии, электронный блок для функционального управления аппаратом, отсек с датчиками информации, отсек для полезного груза, захват для микроинструмента, вертикальное и горизонтальное оперения, микроантенну и микроприемник для радиосвязи, отличающийся тем, что введен электростатический привод машущих движителей, первый и второй машущие движители выполнены антисимметричными и установлены справа и слева относительно продольной оси корпуса аппарата, каждый машущий движитель установлен шарнирно с помощью гофрированной диафрагмы в герметичном кармане, заполненном жидкостью с высокой диэлектрической проницаемостью, машущий движитель состоит из двух частей, одна часть машущего движителя расположена с внешней стороны герметичного кармана и является рабочей, вторая часть размещена внутри герметичного кармана, выполнена в виде плоского проводящего электрода и является подвижной частью электростатического привода, неподвижный электрод электростатического привода размещен относительно подвижного с зазором и параллельно подвижному, для первого и второго машущих движителей неподвижный электрод является общим, введен преобразователь низкочастотных электрических колебаний, первый и второй выходы которого соединены электрически с подвижными и неподвижными электродами привода первого и второго машущих движителей, введен магнитоэлектрический привод машущих движителей, в котором часть машущего движителя, размещенная внутри герметичного кармана, служит рычагом, на конце которого закреплен постоянный магнит, магнитопровод с внутренней обмоткой закреплен в герметичной камере неподвижно, постоянный магнит входит свободно внутрь обмотки, выводы обмотки соединены электрически с соответствующими выводами преобразователя низкочастотных электрических колебаний первого и второго машущих движителей.
| КРЫЛО МАХОЛЕТА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КРЫЛА | 1998 |
|
RU2162428C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПОДЪЕМНОЙ СИЛЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415052C1 |
| АВТОНОМНЫЙ ЛЕТАТЕЛЬНЫЙ МИНИ-АППАРАТ | 2004 |
|
RU2271311C1 |
| US 7341222 B1, 11.03.2008. | |||

