Изобретение относится к малогабаритным авиационным системам с дистанционно пилотируемыми летательными аппаратами, в частности к летательным мини- и микроаппаратам с машущими крыльями общим весом до 0,03 кг, предназначенными для различного рода мониторингов земной поверхности на небольшой высоте и на ограниченные расстояния.
Известен автономно пилотируемый летательный микроаппарат для портативного комплекса авианаблюдений, содержащий фюзеляж с размещенными на нем винтовым движителем и рулевым управлением по курсу и тангажу; в фюзеляже выполнен приборный отсек, в корпусе которого установлены видеокамера с передатчиком видеоизображения, радиоуправляемая бортовая система обеспечения полета и бортовая приемопередающая аппаратура. При этом подъемная сила ЛА обеспечивается с помощью винтового движителя, выполненного в виде, по меньшей мере, одного винтового блока, воздушные винты которого приводятся в движение через редуктор электродвигателя, подключенного к общей аккумуляторной батарее (см. патент РФ №2232104, МПК В 64 С 29/02, G 01 V 9/00, 2003 г.).
Это устройство выполнено довольно компактным, в то же время позволяя автоматизировать управление и корректировку полета летательного аппарата благодаря использованию в радиоуправляемой бортовой системе обеспечения полета микромеханической бесплатформенной инерциальной навигационной системы и других микроэлектронных комплектующих. Однако наличие винтового блока с редуктором и электродвигателем не позволяет существенно снизить габариты и вес летательного аппарата, а также ухудшает его шумовые характеристики.
Известно бионическое устройство с электромагнитным приводом машущих крыльев, являющееся миниатюрным летательным аппаратом, содержащее фюзеляж, одну пару плоских крыльев, электромагнитный привод и систему управления (см. патент КНР № CN 1453185, МПК В 64 С 33/02, 2003 г.). Каждое крыло в этом устройстве сформировано плоским рамочным каркасом с пленкой, прикрепленной к нему. При этом плоский рамочный каркас снабжен тремя параллельными приводными стержнями, перпендикулярными центральной осевой линии летательного аппарата. Каждое плоское крыло имеет отдельный вибрационный блок, прикрепленный к переднему углу и передающий движение к каждому приводному стержню. В устройстве имеется по меньшей мере два (а для обеспечения достаточной подъемной силы в преимущественном варианте выполнения - двенадцать) независимых параллельных электромагнитных привода, установленных симметрично фюзеляжу. Оси катушки, пружины и постоянного магнита привода совпадают друг с другом и перпендикулярны поверхности крыла и приводным стержням. Такая конструкция позволяет осуществлять движение летательного аппарата по управляемой траектории за счет раздельной работы каждого из 12 электромагнитов, согласование действия и размещения которых является сложной технической задачей. Кроме того, наличие сложных кинематических цепей ухудшает надежность устройства, а электромагнитные приводы имеют достаточно большой вес, что увеличивает общую массу и, тем самым, приводит к снижению грузоподъемности летательного аппарата.
Известны результаты научных исследований в области создания микроминиатюрных летательных аппаратов, опубликованные в трудах конференции ICRA (Международной конференции по робототехнике и автоматизации). В частности, известен миниатюрный летательный аппарат с машущими крыльями общей массой 1,05·10-2 кг, содержащий фюзеляж, электрические двигатели, механические передачи и крылья, выполненные в виде рамочного каркаса с пленкой (см. статью Т.Nick Pornsin-Sirirak, Y.-C. Tai, H.Nassef, C.-M. Но, "Titanium - Alloy MEMS Wing Technology for A Micro Aerial Vehicle Application, " Sensors and Actuators, A: Physical, vol.89, Issue 1-2, Mar 20, 2001, pp.95-103). В нем вращение от электродвигателя постоянного тока передается через редуктор и четырехзвенные кривошипно-шатунные механизмы на крылья, установленные на фюзеляже при помощи цилиндрических шарниров. Такое техническое решение позволяет осуществлять полет по прямой линии или по окружности, однако оно не позволяет управлять горизонтальной скоростью аппарата. Кроме того, редуктор и кривошипные механизмы имеют относительно большой вес, что также увеличивает общую массу устройства и снижает полезную грузоподъемность летательного аппарата.
Наиболее близким по технической сущности к заявляемому является устройство "Микромеханическое летающее насекомое", содержащее фюзеляж, установленные на нем машущие крылья, выполненные в виде упругих рамочных каркасов с пленкой, и пьезоэлектрические двигатели, соединенные с крыльями с помощью механических передач (см. статью J.Yan, R.J.Wood, S.Avadhanula, M.Sitti, and R.S.Fearing: Towards flapping Wing Control for a Micromechanical Flying Insect. Proceedings of the 2001 IEEE International Conference on Robotics and Automation, ICRA 2001, pp.3901-3908, Seoul, Korea, May 21-26, 2001). В качестве пьезоэлектрических двигателей в нем используются мономорфные пьезоэлектрические преобразователи, состоящие из одного слоя пьезокерамики и одного слоя металла, которые позволяют получить частоту колебаний крыльев до 120 Гц, необходимую для обеспечения полета аппарата. Для передачи колебаний от пьезоэлектрических преобразователей к крыльям в устройстве использованы четырехзвенные механизмы с упругими шарнирами и дифференциальными механизмами, благодаря которым размах крыльев может достигать 90°, что в принципе обеспечивает полет при массе устройства не более 10-4 кг. Однако такая конструкция летательного аппарата, основанная на применении мономорфных пьезоэлектрических преобразователей и четырехзвенных механизмов, не может обеспечить полет аппарата с большей массой, например с полезной нагрузкой (микровидеокамерой, микросхемами устройства управления и т.п.), а именно с массой 1,0·10-2 - 2,0·10-2 кг. Это связано с тем, что амплитуды мономорфных пьезоэлектрических преобразователей малы, а для повышения грузоподъемности при сохранении требуемых частот колебаний крыльев масса звеньев механических передач должна быть увеличена более чем на порядок, что приведет к возникновению паразитных колебаний в самих механических передачах и не позволит обеспечить необходимого для создания подъемной силы размаха крыльев порядка 90°. Кроме того, в указанном устройстве кинематическая схема механических передач содержит большое количество элементов и сложна в изготовлении, что влечет за собой снижение надежности работы устройства, а дополнительные силы сопротивления в упругих шарнирах, пропорциональные амплитудам колебаний крыльев, требуют увеличения мощности приводов.
Заявленное изобретение решает задачу упрощения конструкции летательного миниаппарата и тем самым повышения надежности его работы, а также увеличения его грузоподъемности за счет повышения мощности двигателей, уменьшения сопротивления в упругих шарнирах.
Для достижения этих целей в летательном миниалпарате, содержащем фюзеляж с установленной подвижно относительно него по меньшей мере одной парой машущих крыльев и жестко закрепленными на нем по меньшей мере двумя пьезоэлектрическими двигателями, машущие крылья соединены с фюзеляжем с помощью сферических шарниров, а пьезоэлектрические двигатели выполнены в виде биморфных пьезоэлектрических преобразователей, связанных с машущими крыльями посредством упругих элементов. При этом каждое машущее крыло соединено с фюзеляжем по меньшей мере одним сферическим шарниром, либо по меньшей мере двумя шарнирами, хотя бы один из которых является сферическим, а другой может быть, например, цилиндрическим. Сферические шарниры каждой пары машущих крыльев соединены попарно таким образом, что общие оси каждой пары шарниров параллельны друг другу и расположены в плоскости, перпендикулярной плоскости симметрии фюзеляжа.
Фюзеляж аппарата выполнен в виде продольного несущего элемента, на котором жестко установлены указанные выше шарниры, а также жестко укреплен по меньшей мере один держатель пьезоэлектрических преобразователей. При этом несущий элемент выполнен в виде удлиненного полого элемента произвольного сечения, симметричного относительно вертикальной оси, например круглого, треугольного или многоугольного. В частном случае несущий элемент выполнен в виде трубки круглого сечения.
Биморфные пьезоэлектрические преобразователи летательного аппарата консольно закреплены в держателе и расположены в плоскости, перпендикулярной плоскости симметрии фюзеляжа, а держатель пьезоэлектрических преобразователей расположен в средней части фюзеляжа.
Каждое машущее крыло в заявленном устройстве выполнено в виде упругого рамочного каркаса с прикрепленной к нему тонкой пленкой из полимерного материала, в качестве которой может быть использована полимерная пленка с перфорированной структурой, пропускающая воздух только в одном направлении.
Каждое машущее крыло соединено по меньшей мере с одним биморфным пьезоэлектрическим преобразователем с помощью по меньшей мере двух упругих элементов, закрепленных симметрично относительно плоскости машущего крыла, по одному с каждой из сторон его каркаса, связанных с шарниром. В одном из вариантов выполнения каждое машущее крыло соединено с двумя биморфными пьезоэлектрическими преобразователями с помощью упругих элементов, закрепленных симметрично относительно плоскости машущего крыла по одному с каждой из противоположных боковых сторон его каркаса, соединенных со сферическим шарниром.
Упругие элементы, соединяющие машущие крылья с пьезоэлектрическими преобразователями, выполнены в виде пружин или двухзвенных механических элементов. При этом в качестве упругих элементов могут быть использованы, например, цилиндрические пружины или плоские фигурные пружины.
Для обеспечения симметричности нагрузки на машущие крылья между ними установлены дополнительные упругие элементы, соединяющие попарно соответствующие стороны каждой пары машущих крыльев, связанные с пьезоэлектрическими преобразователями. Эти дополнительные упругие элементы также могут быть выполнены в виде пружин или двухзвенных механических элементов. При этом в качестве дополнительных упругих элементов могут быть использованы, например, цилиндрические пружины или плоские фигурные пружины.
Основная сущность изобретения состоит в том, что в предлагаемом устройстве, в отличие от прототипа, в качестве пьезоэлектрических двигателей использованы биморфные пьезоэлектрические преобразователи, удельная мощность которых более чем вдвое выше, чем мономорфных (см., например, Джагупов Р.Г., Ерофеев А.А. Пьезоэлектрические устройства вычислительной техники, систем контроля и управления: Справочник. - СПб.: Политехника, 1994. - 608 с; см. с.22). При этом в кинематическую схему привода машущих крыльев включены жестко установленные на фюзеляже сферические шарниры, позволяющие крыльям совершать качательные движения крыльев в разных плоскостях за счет наличия трех степеней свободы, а в прототипе для этого последовательно соединены три упругих шарнира с одной степенью свободы, что сложнее, чем в предлагаемом устройстве. Кинематическая схема привода также включает упругие элементы, которые передают колебания биморфных преобразователей к каркасам машущих крыльев на резонансных частотах и, в то же время, равномерно распределяют нагрузку на крылья. Эти упругие элементы выполнены, преимущественно, в виде пружин различного вида (цилиндрических, плоских фигурных и т.п.), т.е. однозвенных элементов привода, что существенно упрощает конструкцию и одновременно повышает надежность устройства.
Кроме того, моменты трения в сферических шарнирах меньше, чем моменты сопротивления в упругих шарнирах механических передач у прототипа, что позволяет повысить полезную мощность предлагаемого устройства и тем самым повысить его грузоподъемность.
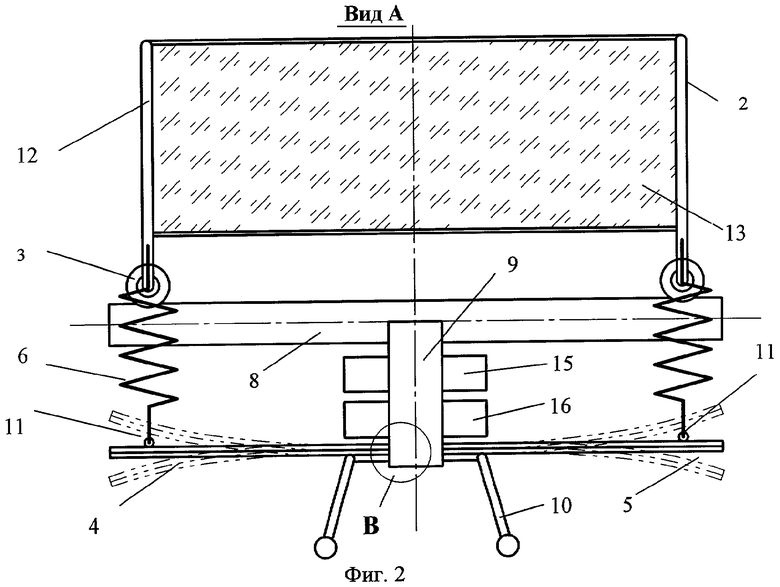
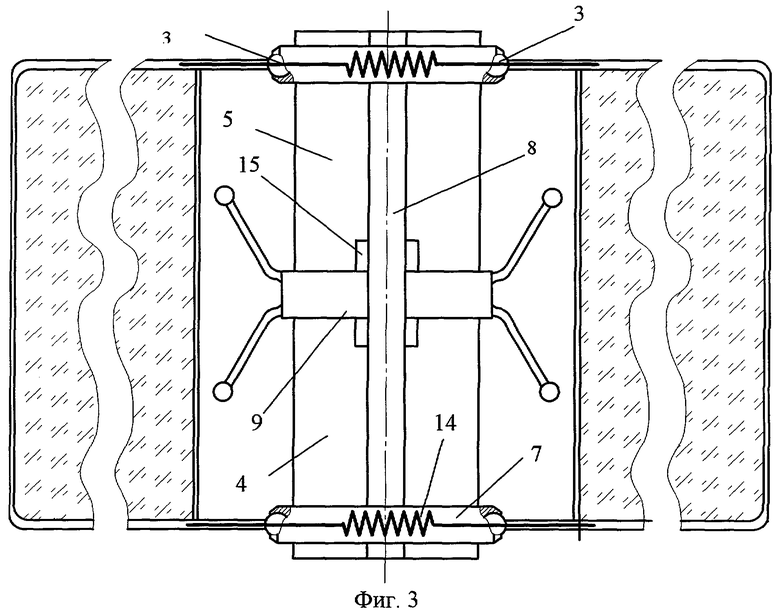
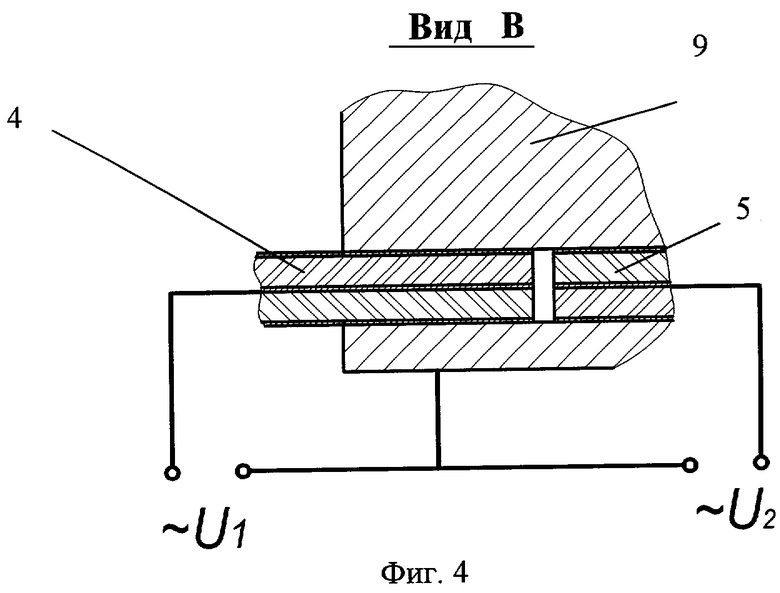
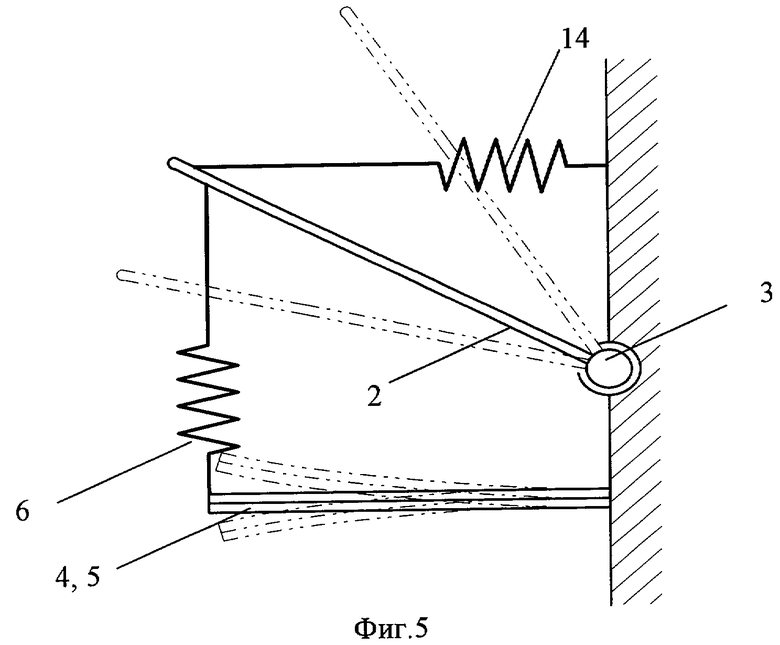
Изобретение поясняется чертежами, на которых на фиг.1 показан предлагаемый летательный миниаппарат; на фиг.2 - то же, вид сбоку; на фиг.3 - то же, вид сверху; на фиг.4 - узел крепления биморфных пьезоэлектрических преобразователей; на фиг.5 - кинематическая схема одного из крыльев.
Летательный миниаппарат с машущими крыльями содержит фюзеляж 1, на котором установлены подвижно относительно него по меньшей мере одна пара машущих крыльев 2, соединенных с фюзеляжем 1 с помощью сферических шарниров 3, и жестко закрепленные на нем по меньшей мере два пьезоэлектрических двигателя, выполненных в виде биморфных пьезоэлектрических преобразователей 4 и 5, связанных с машущими крыльями 2 посредством упругих элементов 6. При этом каждое машущее крыло 2 соединено с фюзеляжем 1 по меньшей мере одним сферическим шарниром либо по меньшей мере двумя шарнирами, хотя бы один из которых является сферическим, а другой может быть, например, цилиндрическим. Для обеспечения симметричности расположения машущих крыльев корпуса 7 сферических шарниров 3 каждой пары крыльев 2 соединены попарно таким образом, что общие оси каждой пары шарниров параллельны друг другу и расположены в плоскости, перпендикулярной плоскости симметрии фюзеляжа 1.
В вариантах выполнения на фюзеляже 1 может быть установлено две, три или более пары машущих крыльев (на чертежах не показано), каждая из которых должна быть соединена с двумя пьезоэлектрическими преобразователями, что обеспечивает не только вертикальный взлет, но и горизонтальное перемещение устройства. Каждое машущее крыло 2, в зависимости от геометрической формы крыльев, соединено с фюзеляжем 1 по меньшей мере одним сферическим шарниром 3 либо по меньшей мере двумя шарнирами, хотя бы один из которых является сферическим, а другой может быть, например, цилиндрическим. В преимущественном варианте выполнения устройства, показанном на чертежах, крылья 2 имеют прямоугольную форму и соединены с фюзеляжем 1 с помощью двух сферических шарниров 3.
Фюзеляж 1 летательного аппарата выполнен в виде продольного несущего элемента 8, в средней части которого прикреплен держатель 9 пьезоэлектрических преобразователей 4 и 5, снабженный опорными ножками 10. При этом несущий элемент 8 может быть выполнен в виде удлиненного полого элемента произвольного сечения, симметричного относительно вертикальной оси, например, в виде полой трубы, полой трехгранной или многогранной призмы. Однако выполнение несущего элемента 8 в виде полой трубки круглого сечения является предпочтительным, поскольку ее удельная жесткость выше, чем с любым другим сечением. Полость внутри несущего элемента 8 может быть использована для размещения полезной нагрузки, например, каких-либо датчиков, микрочипа управления полетом аппарата, элементов питания и т.п.
В вариантах исполнения к несущему элементу 8 может быть прикреплен один держатель для всех пьезоэлектрических преобразователей, как это показано на чертежах, либо несколько держателей по одному или по два на каждый указанный преобразователь. Опорные ножки 10 предназначены для приземления летательного аппарата и для его установки на взлетной поверхности или на руке оператора.
Биморфные пьезоэлектрические преобразователи 4 и 5 консольно закреплены одними концами в пазу нижней части держателя 9 и расположены в плоскости, перпендикулярной плоскости симметрии фюзеляжа 1. Биморфные пьезоэлектрические преобразователи 4 и 5 выполнены в виде прямоугольных пластинок, состоящих из двух слоев пьезокерамики, например, марки ЦТС или ЦТБС, на внешних поверхностях которых и между ними размещены тонкослойные металлические электроды.
На свободных концах биморфных пьезоэлектрических преобразователей 4 и 5 закреплены стержни 11, соединенные с концами упругих элементов 6, которые могут быть выполнены, например, в виде различного типа пружин, в том числе цилиндрических или плоских фигурных пружин, или в виде двухзвенных механических элементов.
Другие концы упругих элементов (пружин) 6 закреплены на машущих крыльях 2, выполненных в виде упругих рамочных каркасов 12 с прикрепленной к ним тонкой пленкой 13 из полимерного материала. При этом каждое машущее крыло 2 соединено с биморфными пьезоэлектрическими преобразователями 4 и 5 с помощью упругих элементов 6, закрепленных симметрично относительно плоскости машущего крыла по одному с каждой из противоположных боковых сторон его каркаса 12, соединенных со сферическим шарниром.
Упругие рамочные каркасы 12 имеют возможность поворачиваться в двух плоскостях относительно несущего элемента 8 с помощью двух сферических шарниров 3 на каждом машущем крыле. Корпуса 7 сферических шарниров закреплены на несущем элементе 8.
Пленка 13 может быть выполнена, например, из полимера перилена (parylene) с перфорированной структурой, пропускающей воздух в одном направлении и препятствующей прохождению воздуха в обратную сторону. Это свойство перилена с перфорированной структурой описано в статье (Nick Pornsin-Sirirak, Matthieu Liger, Yu-Chong Tai Caltech Micromachining Laboratory Electrical. Flexible parylene-valved skin for adaptive flow control).
Для установки машущих крыльев в среднем положении относительно крайних положений и обеспечения симметричности нагрузки на машущие крылья 2 между ними установлены дополнительные упругие элементы 14, соединяющие попарно соответствующие стороны каркасов 12 каждой пары машущих крыльев, связанные с пьезоэлектрическими преобразователями. Эти дополнительные упругие элементы 14 также могут быть выполнены в виде пружин или двухзвенных механических элементов. При этом в качестве дополнительных упругих элементов могут быть использованы, например, цилиндрические пружины или плоские фигурные пружины.
Жесткость упругих элементов (пружин) 6 и 14 подбирается таким образом, чтобы резонанс машущих движений крыльев был в диапазоне 90-120 Гц. Эти частоты соответствуют оптимальным значениям, при которых к.п.д. работы крыльев (и грузоподъемность аппарата) максимален.
Для обеспечения управления полетом летательного миниаппарата в фюзеляже 1 установлены микроэлектронное программируемое устройство управления 15. Устройство также снабжено блоком питания 16 (например, блоком аккумуляторных батарей), с помощью которого переменное напряжение прикладывается к пьезоэлектрическим преобразователям.
Полет летательного миниаппарата с машущими крыльями осуществляется следующим образом. В начальный момент летательный миниаппарат покоится на опорных ножках 10 на поверхности земли или на руке оператора. Затем по команде от устройства управления 15 на электроды биморфных пьезоэлектрических преобразователей 4 и 5 от блока питания 16 подаются гармонические напряжения U1 и U2 с одинаковой амплитудой и без сдвига фаз, что вызывает колебания незакрепленных концов биморфных пьезоэлектрических преобразователей 4 и 5. Эти колебания передаются с помощью упругих элементов (пружин) 6 на упругие рамочные каркасы 12 машущих крыльев 2. Упругие элементы (пружины) 14 распределяют нагрузку на машущих крыльях симметрично, что улучшает устойчивость всего летательного миниаппарата. При частоте гармонических напряжений, близкой к резонансной частоте машущих движений крыльев, амплитуды машущих движений будут максимальны.
На фиг.5 показана кинематическая схема одного из крыльев. При подаче гармонического напряжения U1 и U2 на электроды биморфных пьезоэлектрических преобразователей 4 и 5 их концы перемещаются в вертикальном направлении, растягивая или сжимая упругие элементы 6 и 14. В свою очередь эти элементы воздействуют на рамочные каркасы 12, заставляя их качаться вокруг сферических шарниров 3. В резонансном режиме амплитуды колебаний крыльев будут многократно превышать амплитуды колебаний концов биморфных пьезоэлектрических преобразователей 4, 5. Параметры пружин 6 и 14 можно рассчитать таким образом, чтобы они обеспечивали собственную частоту рассматриваемой колебательной системы в требуемом диапазоне частот f=90-120 Гц, а далее регулировкой частоты подаваемого напряжения можно добиться более точного попадания колебательной системы в резонанс.
Подъемная сила, создаваемая машущими крыльями, увеличивается за счет пленки перилена с перфорированной структурой. При движении крыльев вниз перфорированные отверстия в пленке закрываются под действием напора воздуха, и возникает подъемная сила, отрывающая летательный аппарат от поверхности земли. При движении машущих крыльев вверх перфорированные отверстия в пленке открываются и пропускают поток воздуха через них, не вызывая сопротивления движению воздуха. Усредненная за период махания крыльев подъемная сила позволяет летательному аппарату подниматься в воздух.
Для осуществления горизонтального полета на биморфные пьезоэлектрические преобразователи подаются гармонические напряжения U1 и U2, имеющие разные амплитуды и сдвинутые по фазе на регулируемый угол ϕ. В этом случае упругие рамочные каркасы деформируются, и плоскости крыльев наклоняются по отношению к горизонту, вызывая этим появление тяговой горизонтальной силы за счет разности сопротивлений движению воздуха, взаимодействующего с перфорированной структурой пленки перилена. Таким образом, за счет изменения комбинаций амплитуд гармонических напряжений и сдвига фаз ϕ можно раздельно управлять высотой полета и горизонтальной скоростью полета.
Технический результат предлагаемого устройства состоит в том, что применение сферических шарниров, позволяющих крыльям совершать колебательные движения в разных плоскостях за счет наличия трех степеней свободы, в отличие от последовательно соединенных трех упругих шарниров с одной степенью свободы в известных устройствах, позволяет упростить конструкцию летательного миниаппарата и сократить количество элементов в его приводе, а тем самым повысить надежность его работы. Кроме того, упрощение конструкции влечет за собой уменьшение веса механических передач и всего устройства в целом, а следовательно, повышение грузоподъемности. Вместе с тем, использование биморфных пьезоэлектрических преобразователей, вместо мономорфных, а также их связь с машущими крыльями с помощью однозвенных упругих элементов дает возможность увеличить грузоподъемность устройства за счет повышения мощности двигателей, уменьшения сопротивления в упругих шарнирах и оптимизации массогабаритных показателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| ДВУХКООРДИНАТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДЕФЛЕКТОР | 2009 |
|
RU2402795C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ВИБРОКОНВЕЙЕР ДЛЯ МИНИАТЮРНЫХ ДЕТАЛЕЙ | 1993 |
|
RU2069162C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
Изобретение относится к летательным мини- и микроаппаратам с машущими крыльями. Аппарат содержит фюзеляж с установленной подвижно относительно него по меньшей мере одной парой машущих крыльев и жестко закрепленными на нем по меньшей мере двумя пьезоэлектрическими двигателями. Машущие крылья соединены с фюзеляжем с помощью сферических шарниров, а пьезоэлектрические двигатели выполнены в виде биморфных пьезоэлектрических преобразователей, связанных с машущими крыльями посредством упругих элементов. Каждое машущее крыло выполнено в виде упругого рамочного каркаса с прикрепленной к нему тонкой пленкой из полимерного материала и соединено с преобразователями с помощью упругих элементов, выполненных в виде пружин или двухзвенных механических элементов. Между машущими крыльями установлены упругие дополнительные элементы, соединяющие попарно соответствующие стороны каждой пары машущих крыльев. Технический результат - повышение надежности и увеличение грузоподъемности. 19 з.п. ф-лы, 5 ил.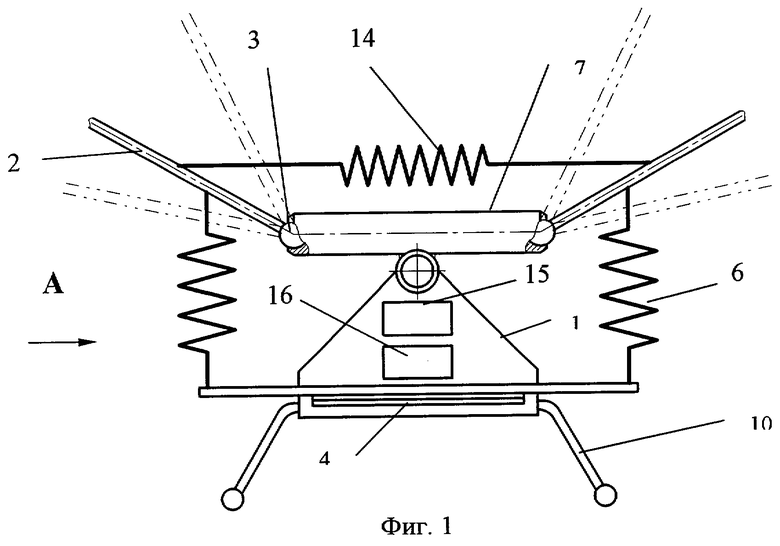
| ICRA, SEOUL | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПЕСОЧНИЦ У ВЕДУЩИХ ПОДВИЖНОЙ СОСТАВ ПОВОЗОК | 1926 |
|
SU3901A1 |

