Изобретение относится к винтовым землеройным машинам и может быть использовано в строительстве, геологоразведке и личном хозяйстве.
Известна винтовая землеройная машина, содержащая привод и винтовой землеройный орган - сменную буровую насадку. Однако винтовой землеройный орган как сменное оборудование может работать только для рыхления поверхностей грунта на малой глубине (прототип а.с. №293964).
Цель данного изобретения - бурение скважин в автономном режиме на большой глубине и в любой плоскости без удаления грунта. Поставленная цель достигается тем, что она включает сменную буровую насадку, а в качестве привода используется безреактивный, маховичный, реверсивный, ударно-импульсный привод, патент №2341699.
Сменная буровая насадка выполнена в форме правильной трехгранной пирамиды, состоящей из режущей части при вершине пирамиды и движителя, имеющего лопасти на закругленных радиусом R=R1-H/2 ребрах пирамиды по трехзаходной винтовой линии, причем режущая часть начинается в точках R=R1-H/2=0, а диаметр отверстия скважин калибруется конической частью корпуса привода.
Сменная буровая насадка - винтовой землеройный орган требует меньше затрат энергии, так как режущая часть его готовит для работы движителя рабочую зону, то есть условия для вхождения движителя в грунт, а сам винтовой землеройный орган входит в грунт и расклинивает скважину не всей поверхностью, а только закругленными ребрами пирамиды, а также погружение снаряда обеспечивается при меньшем сопротивлении вследствие постепенного развития винтовых лопастей.
На фиг.1 показан общий вид бурового подземного снаряда, подвижная полумуфта показана в рабочем и исходном положениях, слева - рабочее положение.
- R - радиус на закругленных ребрах правильной трехгранной пирамиды.
- R1 - радиус вписанной окружности правильной трехгранной пирамиды.
- H - расстояние между осью правильной трехгранной пирамиды и центрами радиусов на закругленных ребрах этой пирамиды.
- α/2 - угол между осью и боковой гранью правильной трехгранной пирамиды.
Буровой подземный снаряд содержит безреактивный, маховичный, реверсивный, ударно-импульсный привод, передающий энергию раскрученных маховиков 3, 4, 5 через приводной вал 1 на сменную буровую насадку. На маховике 3 выполнены два шарнирно закрепленных на нем трехплечих рычага 6, соединенных одним плечом через стакан 7, опору 8 с подвижной полумуфтой 9, нагруженной возвратными пружинами 10 и расположенной на приводном валу 1, с возможностью фиксации шариковым фиксатором 11. Подвижная полумуфта 9 несет на себе механизм включения муфты, содержащий втулку 12, два ловителя 13 и 14 с подпружиненными стержнями 15, пружину кручения 16, на концах которой закреплены ловители и механизм управления подвижной шпонкой 17, содержащей кольцо 18 с закрепленным на нем кулачком 19, воздействующим с выступом подвижной шпонки 17. Упоры 20, закрепленные на ведущей полумуфте 21, жестко смонтированной на маховике 3, выполнены с предохранителями. Второе плечо рычагов 6 контактирует с тягой 22. Грузы 23 между собой связаны, стянутыми возвратными пружинами, шарнирной кинематической связью. Приводная шестерня 24, свободно сидящая на маховике 3, передает вращение этому маховику от приводного двигателя через предохранительную муфту (трещотку) 25.
Снаряд работает следующим образом. Приводной двигатель передает вращение на приводную шестерню 24, далее через предохранительную муфту (трещотку) 25 на маховики 3, 4, 5, связанные между собой кулачками. Под действием центробежных сил грузы 23, расположенные на маховике 3, перемещаются вместе с тягами 22, а так как подвижная полумуфта 9 фиксирована шариковым фиксатором 11 и, следовательно, рычаги 6 неподвижны, грузы 23 заходят в зацепление с ними и запирают их. При дальнейшем перемещении грузов 23 за счет отжима возвратных пружин, пока рычаги находятся в зацеплении, происходит накопление энергии для включения муфты. Так как грузы 23 между собой связаны шарнирной кинематической связью, происходит одновременное освобождение рычагов 6 и выход их из зацепления. Под действием центробежных сил рычаг 6 начинает поворачиваться и через стакан 7 и опору 8, отжимая шариковый фиксатор 11, выводит подвижную полумуфту 9 в рабочее положение - до соприкосновения поверхности В, механизма включения с ведущей полумуфтой 21, показано на фиг.1 слева. Под действием сил трения кольцо 18 поворачивается, а закрепленный на нем кулачок взаимодействует с выступом подвижной шпонки 17 и перемещает ее в крайнее рабочее положение, при этом включается один из ловителей. Включенный ловитель 13 или 14 (реверсивное вращение) под действием скрученной пружины 16 начинает вращаться, а кулачки, выполненные на втулке 12, выводят подпружиненные стержни 15 в рабочее положение. Предохранитель, выполненный на упоре 20, выхватывает только тот подпружиненный стержень 15, который успел выйти в рабочее положение. Дальнейшее вращение фиксированных полумуфт, при предельном скручивании, приводит к вращению втулки 12, которая взаимодействуя скосами с ведомой полумуфтой 9, отжимает пружину 10 и вводит эту полумуфту в зацепление с ведущей полумуфтой 21. Таким образом происходит жесткое соединение маховиков с приводным валом 1, на котором сидит сменная буровая насадка, а маховики вступают в работу последовательно. Одновременно при повороте втулки 12, относительно ведомой полумуфты, на подвижную шпонку 17 взаимодействуют кулачки полумуфты 9 и перемещают ее в среднее нерабочее положение, при котором оба ловителя сидят на шпонке 17. При приближении скорости маховиков к нулю грузы 23 под действием пружины возвращаются в исходное положение и, отжимая шариковый фиксатор 11, через рычаги 6, стакан 7, опору 8, выводят полумуфту 9 из зацепления, а исходное положение опоры 8 фиксируется шариковым фиксатором 11, в свою очередь подвижная полумуфта 9 и втулка 12 также занимают исходное положение под действием возвратных пружин 10, причем грузы 23, относительно третьего плеча рычагов 6, перемещаются быстрее и занимают взаимно исходное положение, как показано на фиг.1 справа.
Просмотренные аналоги
1. Авторское свидетельство №293964.
2. Авторское свидетельство №238425.
3. Журнал ИР, 3, 76, стр.16.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОВИЧНЫЙ УДАРНО-ИМПУЛЬСНЫЙ ПРИВОД | 2004 |
|
RU2341699C2 |
| КУЛАЧКОВАЯ СЦЕПНАЯ МУФТА | 1997 |
|
RU2195588C2 |
| Кулачковая сцепная муфта | 1974 |
|
SU618586A1 |
| ГИДРАВЛИЧЕСКИЙ ОТКЛОНИТЕЛЬ | 2008 |
|
RU2361056C1 |
| Мелиоративный глубокорыхлитель-удобритель | 2016 |
|
RU2629783C1 |
| Рабочий орган глубокорыхлителя-удобрителя | 2015 |
|
RU2611182C1 |
| ВИНТОВОЙ СТОМАТОЛОГИЧЕСКИЙ ИМПЛАНТАТ | 2006 |
|
RU2314059C1 |
| СПЕЦИАЛИЗИРОВАННЫЙ ИССЛЕДОВАТЕЛЬСКИЙ КОМПЛЕКС ДЛЯ ДИСТАНЦИОННОГО ДИАГНОСТИРОВАНИЯ ПРОЦЕССА СМЕШИВАНИЯ ДИСПЕРСНЫХ МАТЕРИАЛОВ В КОНСТРУКЦИИ СМЕСИТЕЛЕЙ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ | 2006 |
|
RU2342983C2 |
| УСТРОЙСТВО ДЛЯ СБОРКИ СЕКЦИЙ БУРОВОГО ШАРОШЕЧНОГО ДОЛОТА | 2006 |
|
RU2334074C2 |
| КОМПЛЕКС ВОЗДЕЙСТВИЯ НА ОБЛАКА | 2003 |
|
RU2267914C2 |
Изобретение относится к винтовым землеройным машинам и может быть использовано в строительстве, геологоразведке и в личном хозяйстве. Буровой подземный снаряд содержит привод и винтовой землеройный орган - сменную буровую насадку. Винтовой землеройный орган выполнен в форме правильной трехгранной пирамиды, состоящей из режущей части при вершине пирамиды и движителя, имеющего лопасти на закругленных радиусом R=R1-H/2 ребрах пирамиды по трехзаходной винтовой линии, причем режущая часть начинается в точках R=0, где R - радиус на ребрах правильной трехгранной пирамиды; R1 - радиус вписанной окружности правильной трехгранной пирамиды; Н - расстояние между осью правильной трехгранной пирамиды и центрами радиусов на закругленных ребрах пирамиды. Обеспечивает бурение скважины в автономном режиме на большой глубине и в любой плоскости без удаления грунта. 1 ил.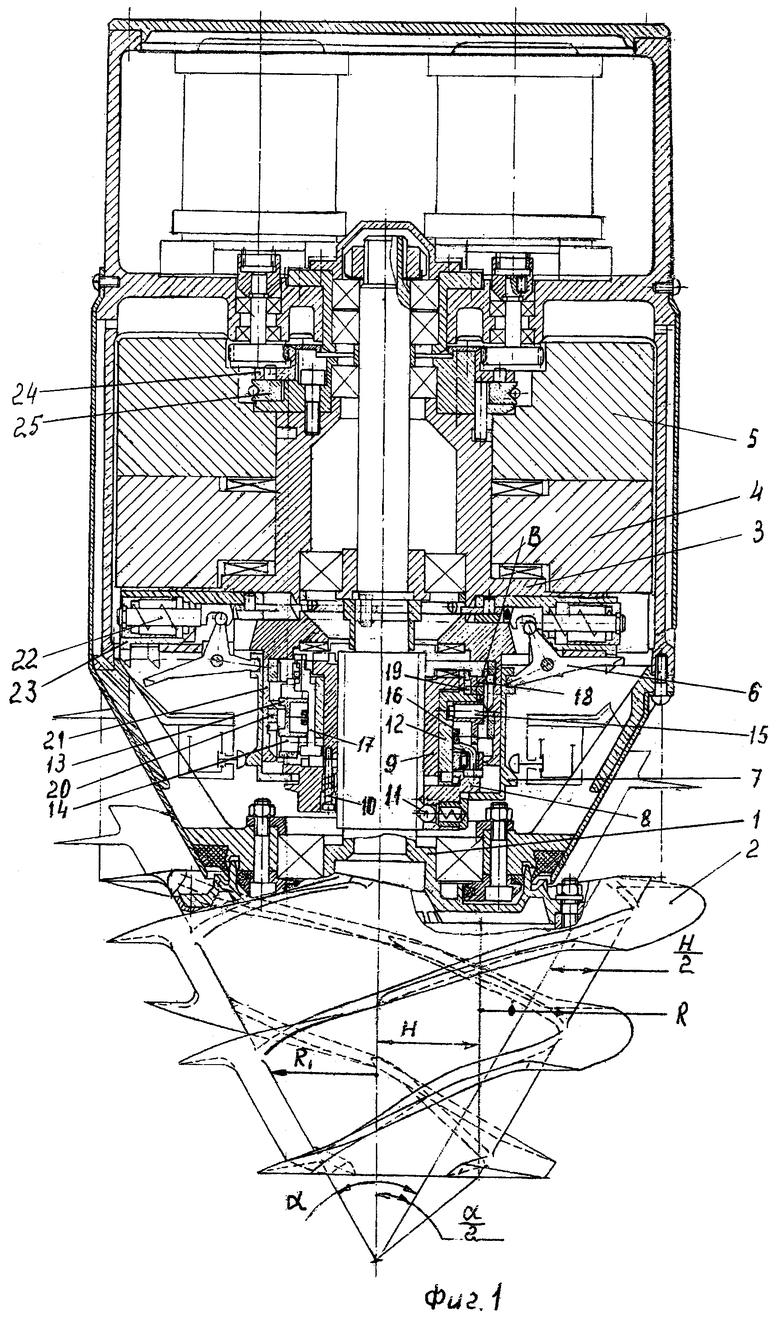
Буровой подземный снаряд, содержащий привод и винтовой землеройный орган - сменную буровую насадку, отличающийся тем, что винтовой землеройный орган выполнен в форме правильной трехгранной пирамиды, состоящей из режущей части при вершине пирамиды и движителя, имеющего лопасти на закругленных радиусом R=R1-H/2 ребрах пирамиды по трехзаходной винтовой линии, причем режущая часть начинается в точках R=0,
где R - радиус на ребрах правильной трехгранной пирамиды;
R1 - радиус вписанной окружности правильной трехгранной пирамиды;
H - расстояние между осью правильной трехгранной пирамиды и центрами радиусов на закругленных ребрах пирамиды.
| УСТРОЙСТВО для РАЗРАБОТКИ МЕРЗЛОГО ГРУНТА | 0 |
|
SU293964A1 |
| Буровой снаряд | 1987 |
|
SU1528888A1 |
| УСТРОЙСТВО ГРУНТОПРОХОДНОЕ ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН | 1995 |
|
RU2098566C1 |
| МАХОВИЧНЫЙ УДАРНО-ИМПУЛЬСНЫЙ ПРИВОД | 2004 |
|
RU2341699C2 |
| ДОЛОТО ДЛЯ БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2007 |
|
RU2360096C1 |
| Многошнековый пресс | 1956 |
|
SU108791A1 |
| JP 5086791 A, 06.04.1993. | |||

