Изобретение относится к машиностроению и может быть использовано в любой области техники при необходимости больших усилий, высокой удельной энергоемкости, реверсивного режима работы и отсутствия реактивного крутящего момента.
Известен привод, содержащий вал, маховик с приводным двигателем, муфту, размещенную между маховиком и приводным валом и механизмом управления муфтой.
Однако этот привод не может иметь большую удельную энергоемкость, т.к. обороты маховика низкие, и кроме того, для управления муфтой требуется дополнительный источник энергии.
Цель данного изобретения - повысить удельную энергоемкость и за счет центробежных сил обеспечить автоматическое управление муфтой при заданных больших оборотах маховика, например, при частоте вращения 1200 об/мин, и обеспечить реверсивный режим работы.
Поставленная цель достигается тем, что она включает центробежный механизм автоматического управления муфтой, а в качестве муфты использована реверсивная кулачковая сцепная муфта, патент №2195588.
Центробежный механизм автоматического управления муфтой состоит из двух шарнирно закрепленных на маховике трехплечих рычагов, соединенных одним плечом через стакан и опору с подвижной полумуфтой, расположенной на приводном валу с возможностью фиксации в рабочем и исходном положениях, вторые плечи контактируют с подпружиненными тягами, находящимися внутри диаметрально расположенных в маховике грузов с возможностью свободного перемещения вместе с грузами, при этом грузы между собой связаны стянутыми возвратными пружинами и шарнирной кинематической связью, содержащей коромысло, свободно расположенное на приводном валу, на концах которого шарнирно закреплены серьги, связанные каждая общей осью с грузом и ползуном, которые взаимодействуют с упомянутыми возвратными пружинами, также расположенными в маховике.
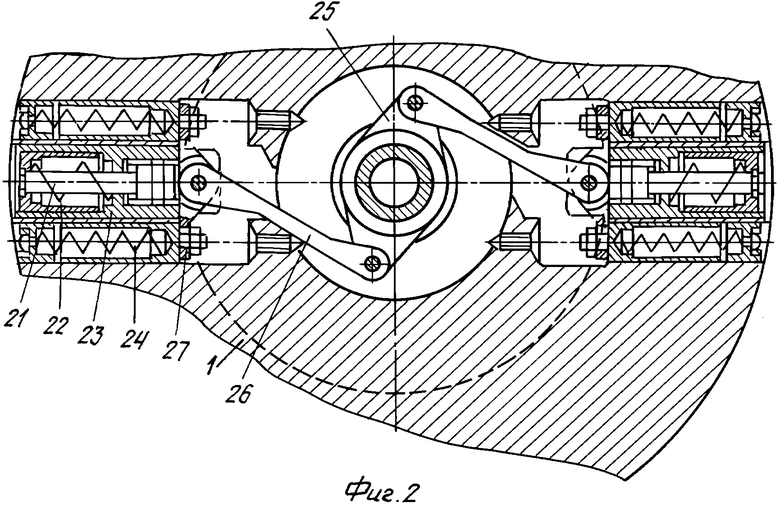
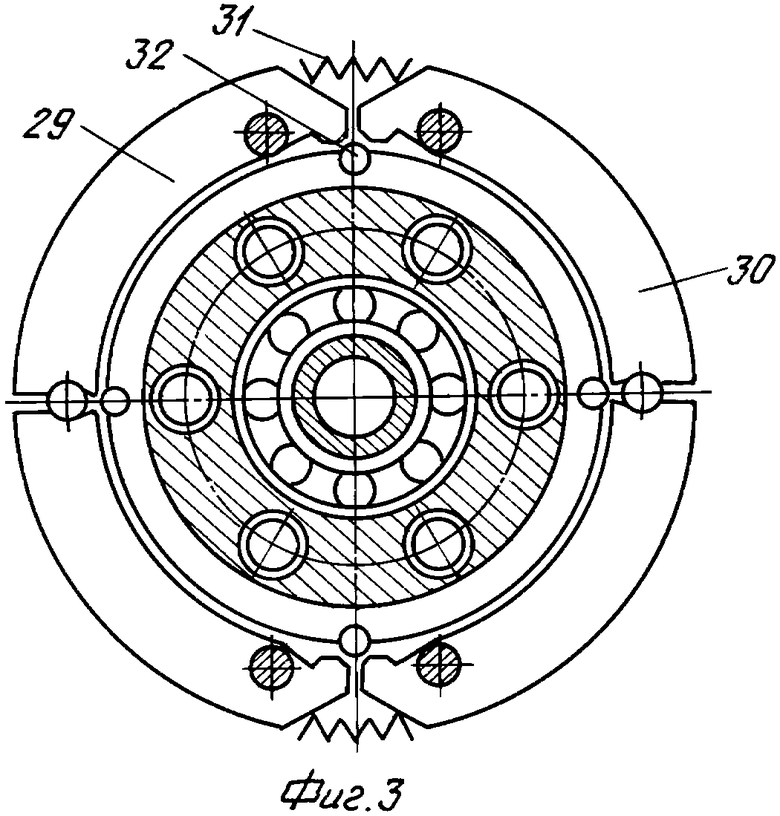
На фиг.1 показан общий вид привода, подвижная полумуфта показана в рабочем и исходном положениях, слева - рабочее положение. На фиг.2 - разрез А-А фиг.1, шарнирная кинематическая связь грузов. На фиг.3 - разрез Б-Б фиг.1, предохранительная муфта (трещотка).
Привод содержит один или несколько маховиков, связанных между собой кулачками. На фиг.1 показаны три маховика 1, 2, 3, в том числе и маховик 1, содержащий два шарнирно закрепленных на нем трехплечих рычага 4, соединенных одним плечом через стакан 5, опору 6 с подвижной полумуфтой 7, нагруженной возвратными пружинами 8 и расположенной на приводном валу 9 с возможностью фиксации шариковым фиксатором 10. Подвижная полумуфта 7 несет на себе механизм включения муфты, содержащий втулку 11, два ловителя 12 и 13 с подпружиненными стержнями 14, пружину кручения 15, на концах которой закреплены ловители, и механизм управления подвижной шпонкой 16, содержащий кольцо 17 с закрепленным на нем кулачком 18, воздействующим с выступом подвижной шпонки 16. Упоры 19, закрепленные на ведущей полумуфте 20, жестко смонтированной на маховике 1, выполнены с предохранителями. Второе плечо рычагов 4 контактирует с тягой 21, нагруженной пружиной 22. Грузы 23 между собой связаны стянутой возвратными пружинами 24 шарнирной кинематической связью, содержащей коромысло 25, свободно расположенное на приводном валу 9, на концах которого шарнирно закреплены серьги 26, связанные каждая общей осью с грузом 23 и ползуном 27.Приводная шестерня 28, свободно сидящая на маховике 1, передает вращение от приводного двигателя через предохранительную муфту (трещотку), содержащую разноплечие рычаги-грузы 29 и 30, стянутые бесконечной пружиной растяжения 31, попарно зеркально расположенные и свободно сидящие на осях по периметру шестерни 28, взаимодействующие с маховиком 1 короткими плечами через цилиндрическую поверхность штифтов 32 с возможностью проскальзывания.
Привод работает следующим образом. Приводной двигатель передает вращение на приводную шестерню 28. При достижении определенной угловой скорости в рычагах-грузах 29 и 30 возникает центробежная сила, достаточная для преодоления усилия бесконечной цилиндрической пружины 31, в результате чего рычаги-грузы поворачиваются и начинают взаимодействовать короткими плечами с маховиком 1 через цилиндрическую поверхность штифтов 32. В силу зеркальности расположения рычагов-грузов 29 и 30, фиг.3, при любом направлении вращения шестерни 28 возникает пара сил, раскручивающая маховик 1. Если привод содержит несколько маховиков, то они, по мере раскручивания, отстают друг от друга на угол свободной зоны ˜ 160°-170°. Количество маховиков принимается в зависимости от нагрузки, которую воспринимает слабое звено - это может быть шлицевое соединение, где расположена подвижная полумуфта 7.Под действием центробежных сил грузы 23 также начинают перемещаться вместе с тягой 21, ползуном 27, причем ползуны отжимают возвратные пружины 24, а грузы 23, т.к. подвижная полумуфта 7 сфиксирована шариковым фиксатором 10 и, следовательно, рычаги 4 неподвижны, заходят в зацепление с ними и запирают их. Дальнейшее перемещение грузов 23 и ползунов 27 происходит с отжимом пружин 22 и 24, а за счет отжима пружины 22, пока рычаг 4 находится в зацеплении, происходит накопление энергии для включения муфты. Кроме того, грузы 23 между собой связаны шарнирной кинематической связью через серьгу 26 и коромысло 25, что обеспечивает одновременное освобождение рычагов 4 и выход их из зацепления. Для обеспечения выхода из зацепления рычагов 4, при определенной частоте вращения маховика, например 1200 об/мин, необходимо подобрать жесткость пружин 22 с учетом жесткости возвратных пружин 24 и центробежных сил подвижных деталей. При выходе рычагов 4 из зацепления резко возрастает нагрузка на возвратные пружины 24 от действия центробежных сил всех подвижных деталей, в том числе грузов 23 и ползунов 27, и потому ползуны вместе с грузами расходятся и занимают предельное положение, показано на фиг.2, разрез А-А. Самый лучший вариант в этом положении, когда действие возвратных пружин 24, пружин 22 и центробежных сил равно нулю. В этом случае нагрузка на стенку корпуса маховика 1 равна нулю. Следовательно, если суммарная нагрузка центробежных сил 60 кг, возвратных пружин 30 кг, то нагрузка на подвижную полумуфту 7 при равном соотношении плеч рычагов - 30 кг. В момент выхода рычага 4 из зацепления эта сила еще больше, т.е. вполне достаточная, чтобы отжать шариковый фиксатор 10 и вывести подвижную полумуфту в рабочее положение - до соприкосновения поверхности В механизма включения с ведущей полумуфтой, показано на фиг.1 - слева. Под действием сил трения кольцо 17 поворачивается, а закрепленный на нем кулачок 18 взаимодействует с выступом подвижной шпонки 16 и перемещает ее в крайнее рабочее положение, при этом включается один из ловителей. Включенный ловитель 12 или 13 (реверсивное вращение) под действием скрученной пружины 15 начинает вращаться, а кулачки, выполненные на втулке 11, выводят подпружиненные стержни в рабочее положение. Предохранитель, выполненный на упоре 19, выхватывает только тот подпружиненный стержень 14, который успел выйти в рабочее положение. Далее подпружиненный стержень 14 под действием скрученной пружины 15, отжимая предохранитель, упирается в упор 19 - происходит фиксация. Дальнейшее вращение сфиксированных полумуфт при предельном скручивании приводит к вращению втулки 11, которая, взаимодействуя скосами с ведомой полумуфтой 7, отжимает пружины 8 и вводит эту полумуфту в зацепление с ведущей полумуфтой 20. Таким образом происходит жесткое соединение маховика (маховиков) с приводным валом, а маховики вступают в работу последовательно. Одновременно при повороте втулки 11 относительно ведомой полумуфты на подвижную шпонку 16 воздействуют кулачки полумуфты 7 и перемещают ее в среднее нерабочее положение, при котором оба ловителя сидят на шпонке 16.
При приближении скорости вращения маховика (маховиков) к нулю грузы 23 вместе с ползунами 27 под действием пружин 22 и 24 возвращаются в исходное положение, причем возвратные пружины 24 отжимают шариковый фиксатор 10 и через рычаги 4, стакан 5, опору 6, выводят полумуфту 7 из зацепления, а исходное положение опоры 6 фиксируется шариковым фиксатором 10, в свою очередь подвижная полумуфта 7 и втулка 11 также занимают исходное положение под действием возвратных пружин 8, причем грузы 23 относительно третьего плеча рычагов 4 перемещаются быстрее и занимают взаимное исходное положение, как показано на фиг.1 - справа.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВОЙ ПОДЗЕМНЫЙ СНАРЯД | 2011 |
|
RU2470132C1 |
| КУЛАЧКОВАЯ СЦЕПНАЯ МУФТА | 1997 |
|
RU2195588C2 |
| Кулачковая сцепная муфта | 1974 |
|
SU618586A1 |
| ФУНДАМЕНТ ПОДШИПНИКОВОЙ ОПОРЫ КАРУСЕЛИ | 2013 |
|
RU2535721C2 |
| Патрон с центробежно-инерционным приводом | 1972 |
|
SU499056A1 |
| Высечные ножницы | 1980 |
|
SU867535A1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| Электромеханический привод | 1989 |
|
SU1764850A1 |
| АВТОМАТИЧЕСКИЙ КРУГЛО-ТКАЦКИЙ СТАНОК | 1946 |
|
SU71477A1 |
| ПРИБОР ДЛЯ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ ПЛАСТИЧНЫХ/МАТЕРИАЛОВ | 1970 |
|
SU271856A1 |
Изобретение относится к машиностроению и может быть использовано в любой области техники. Привод содержит приводной вал, маховик с приводным двигателем, муфту, размещенную между маховиком и приводным валом, и механизм управления муфтой. Также привод содержит центробежный механизм автоматического управления муфтой, состоящий из двух шарнирно закрепленных на маховике трехплечих рычагов. Одни плечи соединены через стакан и опору с подвижной полумуфтой, расположенной на приводном валу с возможностью фиксации в рабочем и исходном положениях. Вторые плечи рычагов контактируют с подпружиненными тягами, находящимися внутри диаметрально расположенных в маховике грузов с возможностью свободного перемещения вместе с грузами. Грузы между собой связаны стянутой возвратными пружинами шарнирной кинематической связью, содержащей коромысло, свободно расположенное на приводном валу. На концах коромысла шарнирно закреплены серьги, связанные каждая общей осью с грузом и ползуном, которые взаимодействуют с упомянутыми возвратными пружинами, также расположенными в маховике. Технический результат заключается в повышении удельной энергоемкости, обеспечении автоматического управления муфтой при больших оборотах маховика и обеспечении реверсивного режима работы. 2 з.п. ф-лы, 3 ил.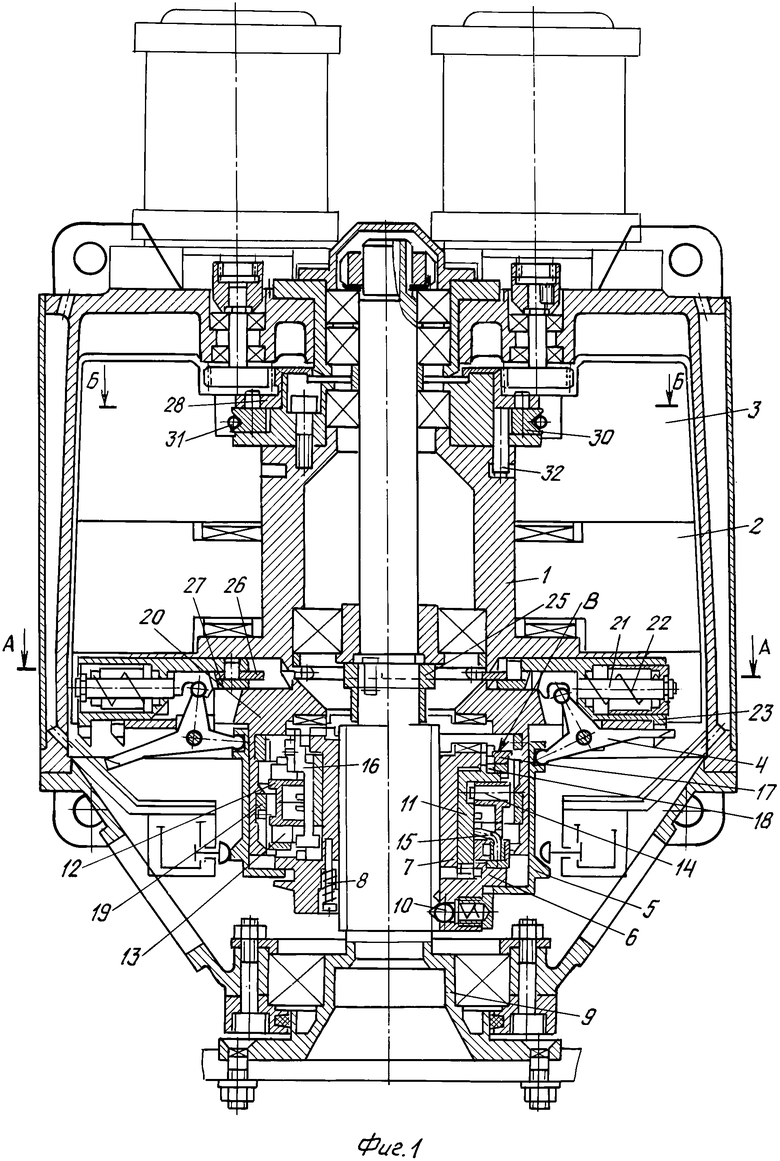
| КУЛАЧКОВАЯ СЦЕПНАЯ МУФТА | 1997 |
|
RU2195588C2 |
| ФРИКЦИОННАЯ МУФТА | 0 |
|
SU220695A1 |
| DE 19734467 A1, 18.02.1999. | |||

