Техническое решение относится к измерительной технике и может быть использовано для измерения угловых перемещений (поворотов), с помощью преобразователя перемещения индукционного типа.
Известен «Индукционный датчик углового положения» по патенту РФ 2502046 от 20.12.2013 года, МПК G01B 7/00 - [1], содержащий установленные с общей осью вращения относительно друг друга с одной степенью свободы плоские неподвижную и подвижные части из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими катушками индуктивности, при этом печатные плоские катушки выполнены зигзагоподобными, соответственно расположенными по дугам окружности активными длинными проводниками и расположенными по радиусам пассивными короткими проводниками. Подвижная и неподвижная части могут содержать по одной идентичной катушке, которые расположены в секторе с углом, меньшим или равным 180°, причем в первоначальном положении датчика катушки смещены относительно друг друга на угол, равный половине угла сектора расположения катушек. Неподвижная часть датчика может содержать две идентичные катушки, расположенные в секторах с углом, меньшим или равным 180°, а подвижная часть датчика содержит одну аналогичную катушку, которая в первоначальном положении датчика смещена относительно двух катушек неподвижной части датчика на угол, равный половине угла секторов их расположения. Неподвижная часть датчика может содержать четное число N идентичных катушек, расположенных равномерно в равных секторах, а подвижная часть датчика содержит в два раза меньше - N/2 идентичных катушек, расположенных в аналогичных секторах через один, при этом сектора расположения катушек неподвижной и подвижной частей датчика в его первоначальном положении смещены относительно друг друга на угол, равный половине угла секторов, при этом в неподвижной части датчика катушки, расположенные в секторах через один, соединены между собой последовательно с образованием двух катушек индуктивности, а в подвижной части датчика катушки соединены между собой последовательно с образованием одной катушки индуктивности. Изобретение решает задачи расширения диапазона измерений, упрощения конструкции датчика и повышения точности измерений.
Недостатком аналога [1] является то, что он не позволяет отслеживать углы поворота равные или больше 180°. Это существенно усложняет приборы для считывания информации об угле поворота.
Прототипом предложенного технического решения является «Индукционный датчик углового положения» по патенту РФ 2570232 С1 от 10.12.2015 года, МПК G01B 7/30 - [2], содержащий вращающийся трансформатор и установленные с общей осью вращения относительно друг друга с одной степенью свободы неподвижные и подвижные плоские пластины из диэлектрического материала (далее пластины), обращенные друг к другу сторонами с нанесенными на них печатными плоскими зигзагоподобными катушками индуктивности, соответственно расположенными по дугам окружности активными длинными проводниками и расположенными по радиусам пассивными короткими проводниками, подвижные пластины жестко установлены на одном валу вращения, пластины с печатными катушками имеют идентичные реперные сквозные отверстия, расположенные по периферии за окружностью печатных катушек, при этом пассивные короткие проводники печатных катушек расположены на обратной стороне пластин и соединены с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий. При этом датчик содержит две пары неподвижных и подвижных пластин, содержащих по две идентичные катушки, которые расположены равномерно в равных секторах с углом раскрытия, равным 180°, подвижные пластины жестко установлены на одном валу вращения, в одной паре пластин неподвижная и подвижные катушки расположены симметрично, а в другой паре пластин неподвижная и подвижные катушки смещены на угол, равный 90°, при этом на каждой пластине соответственно расположенные на них две катушки соединены между собой последовательно и встречно. Индукционный датчик углового положения может быть снабжен вращающимся трансформатором, подвижная обмотка которого закреплена на валу вращения и подсоединена к зигзагоподобным катушкам индуктивности подвижных пластин датчика. Прототип [2] решает задачу расширения диапазона измерения углов поворота прототипа больше 180° (от 0° до 360°).
Индукционный датчик углового положения может быть снабжен вращающимся трансформатором, например, по книге: Сафонов Л.Н., Волнянский В.Н., Окулов А.И., Прохоров В.Н. Презеционные датчики угла с печатными обмотками. Библиотека приборостроителя. М., «Машиностроение», 1977,. 152 с. - рис. 77, стр. 114 - [3]. Вращающийся трансформатор также может быть выполнен воздушным индукционным, например, с пластинами, на которые нанесены печатные спиралеобразные катушки индуктивности, например по книге [3]: рис. 9, стр. 15.
Также известен аналог: «Индукционный вращающийся трансформатор» по патенту РФ 2584010 от 20.05.2016 года, МПК H01F 38/14 - [4], содержащий установленные с общей осью вращения относительно друг друга с одной степенью свободы неподвижную и подвижную плоские пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них плоскими печатными катушками индуктивности в виде коаксиально расположенных, разорванных витков концентрических окружностей. При этом печатные катушки индуктивности неподвижной и подвижной пластин идентичны, выполнены из N числа витков разорванных по радиусу с одинаковым интервалом концентрических окружностей, соседние по радиусу витки концентрических окружностей соединены между собой прямыми наклонными перемычками, расположенными в разорванном интервале под углом наклона 45° или 315° к радиусу.
Аналог [4] патентообладателя ОАО «Авангард» - заявителя настоящей заявки на изобретение может быть использован для питания катушек излучателей (индукторов) подвижных пластин индукционного датчика углового положения как прототипа [2], так и заявляемого технического решения.
Недостатком прототипа [2] является сложность его конструкции, состоящей из двух пар из неподвижных и подвижных пластин с катушками и еще как минимум одной пары из неподвижных и подвижных пластин с катушками вращающегося трансформатора. Кроме того, сборка пластин датчика требует тщательной подгонки и юстировки его катушек, что повышает временные затраты на его изготовление. При работе датчика в жестких условиях эксплуатации снижается его надежность ввиду возможных взаимных смещений катушек двух пар неподвижных и подвижных пластин, а также зазоров между ними.
Недостатки аналога и прототипа ставят задачи повышения надежности датчика путем упрощения его конструкции и, как следствие, снижения его стоимости производства и эксплуатации.
Сущность заявленного изобретения заключается в том, что индукционный датчик углового положения, содержащий вращающийся трансформатор и установленные с общей осью вращения относительно друг друга с одной степенью свободы неподвижные и подвижные плоские пластины из диэлектрического материала (далее пластины), обращенные друг к другу сторонами с нанесенными на них печатными плоскими зигзагоподобными катушками индуктивности, соответственно расположенными по дугам окружности активными длинными проводниками и расположенными по радиусам пассивными короткими проводниками. Подвижные пластины жестко установлены на одном валу вращения. Пластины с печатными катушками имеют идентичные реперные сквозные отверстия, расположенные по периферии за окружностью печатных катушек. Пассивные короткие проводники печатных катушек расположены на обратной стороне пластин и соединены с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий. Датчик содержит одну пару из подвижной и неподвижной пластин. На подвижной пластине содержатся две идентичные катушки (катушки-излучателя (индуктора)), которые расположены равномерно в равных секторах с углом раскрытия, равным 180°. На неподвижной пластине содержатся две пары катушек (катушки-приемника) с углом раскрытия, равным 180°, и сдвинутыми относительно друга на угол 90°, при этом активные длинные проводники двух пар катушек вложены друг в друга через виток по радиусу.
Индукционный датчик углового положения может быть снабжен вращающимся трансформатором, выполненным из двух пластин - пары из неподвижной и подвижной пластин с катушками. Подвижная пластина закреплена на валу вращения, а ее катушка подсоединена к зигзагоподобным подвижным катушкам индуктора (излучателя) на подвижной пластине датчика.
Техническим результатом заявляемого изобретения является упрощение конструкции датчика, уменьшение его габаритов и повышение его надежности, и, следовательно, снижения стоимости датчика.
Отличительный признак: «Датчик содержит одну пару из подвижной и неподвижной пластин» необходим для упрощения конструкции датчика, уменьшения его габаритов и повышения его надежности.
Отличительные признаки: «На подвижной пластине содержатся две идентичные катушки (катушки-излучателя (индуктора)), которые расположены равномерно в равных секторах с углом раскрытия, равным 180°» и «На неподвижной пластине (катушки-приемника) содержатся две пары катушек с углом раскрытия, равным 180°, и сдвинутыми относительно друга на угол 90°, при этом активные длинные проводники двух пар катушек вложены друг в друга через виток по радиусу» необходимы для совмещения соответственно катушек излучателя (индуктора) на одной подвижной пластине и катушек приемника на одной неподвижной пластине. Это позволит реализовать заявленный технический результат.
Отличительный признак: «Индукционный датчик углового положения снабжен вращающимся трансформатором, выполненным из двух пластин - пары из неподвижной и подвижной пластин с катушками» необходим для оснащения индукционного датчика углового положения вращающимся трансформатором, конструктивно по своим деталям похожим на детали самого датчика, что также приводит к упрощению конструкции, а также к уменьшению его габаритов и к повышению надежности датчика в целом.
Отличительный признак: «Подвижная пластина (вращающегося трансформатора) закреплена на валу вращения, а ее катушка подсоединена к зигзагоподобным подвижным катушкам индуктора (излучателя) на подвижной пластине датчика» необходим для обеспечения функционирования индукционного трансформатора с заявленным датчиком как при периодических угловых отклонениях, так и при вращении подвижных пластин.
На фиг. 1 представлены чертежи единственной пары пластин датчика из: а) - подвижной пластины датчика (с катушками индуктора (излучателя)); б) - неподвижной пластины датчика (с катушками приемника).
На фиг. 2 представлены чертежи: а) подвижной пластины с двумя катушками излучателя (индуктора) - вид спереди; б) вид сзади этой же пластины, на котором представлен вид соединений пассивными короткими проводниками печатных катушек, расположенных на лицевой стороне пластин катушек с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий.
На фиг. 3 представлены чертежи: а) - неподвижной пластины (датчика) с четырьмя катушками приемника - вид спереди; б) - вид сзади этой же пластины, на котором представлен вид соединений пассивными короткими проводниками печатных катушек, расположенных на лицевой стороне пластин катушек с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий.
На фиг. 4 представлены совмещенные чертежи пары с лицевой (вид спереди) и обратной (вид сзади) подвижной и неподвижной пластин с видом катушек: а) - подвижной пластины (датчика с двумя катушками индуктора); б) - неподвижной пластины (с четырьмя катушками приемника).
На фиг. 5 представлены чертежи пары из: а) - подвижной; б) - неподвижной пластины индукционного вращающегося трансформатора (вид спереди) с одинаковыми катушками индуктора (излучателя) и приемника.
На фиг. 6 представлены фотографии пары (вид спереди) из: а) - подвижной пластины; б) - неподвижной пластины индукционного вращающегося трансформатора по фиг. 5.
На фиг. 7 представлены чертежи: а) - вид спереди подвижной (и неподвижной) пластины индукционного вращающегося трансформатора; б) - вид сзади подвижной (и неподвижной) пластины индукционного вращающегося трансформатора.
На фиг. 8 представлены совмещенные чертежи пары: а) - подвижной; б) - неподвижной пластин индукционного вращающегося трансформатора с видом катушек с лицевой (вид спереди) и обратной (вид сзади) поверхностях пластин.
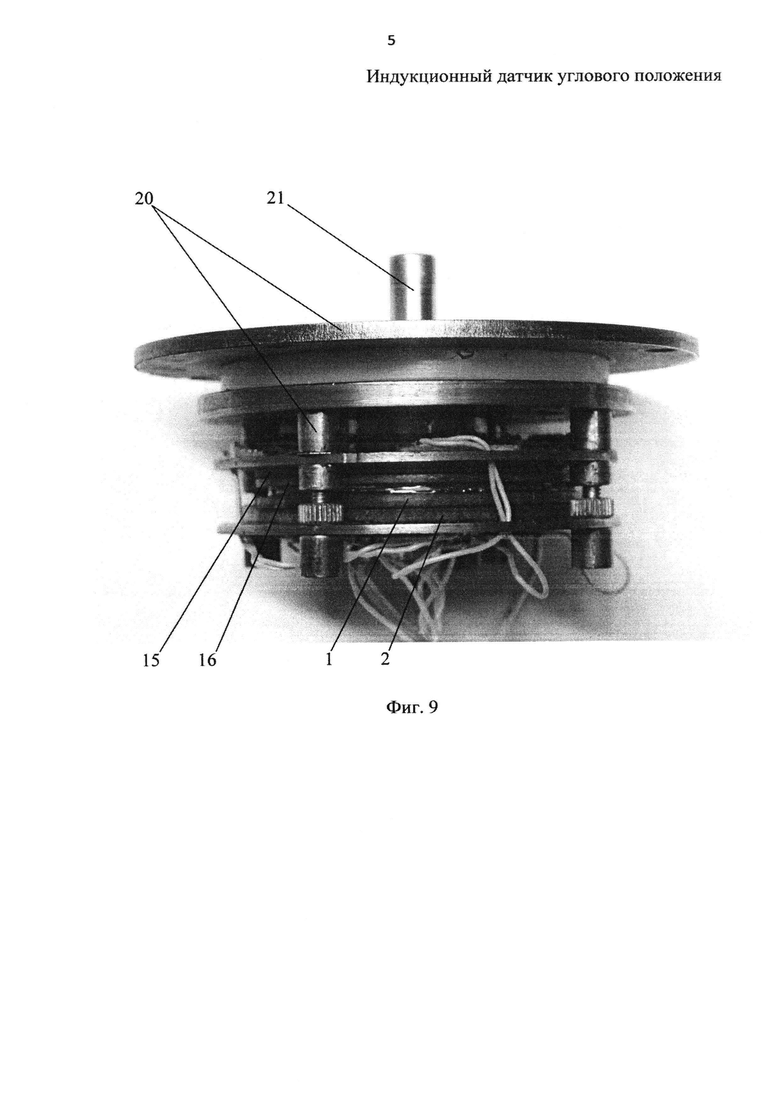
На фиг. 9 - фотография макета датчика (опытного образца датчика).
На фиг. 10 - эквивалентная схема индукционного датчика углового положения из единственной парый из подвижной и неподвижной пластин с катушками и с электропитанием от подвижной катушки вращающегося трансформатора.
На фиг. 11 - форма огибающих выходных сигналов датчика с частотой fо.
На фиг. 12 - схема обработки сигналов датчика.
На фиг. 13 представлен характер (зависимости) изменения сигналов UA и UB в зависимости от угла поворота вала α°.
Индукционный датчик углового положения содержит одну пару из подвижной (1) и неподвижной (2) пластин. Подвижная пластина (1) на фиг. 1 а) содержит две идентичные катушки индуктора (излучателя): соответственно (3) и (4), которые расположены равномерно в равных секторах с углам раскрытия, равным 180°. Неподвижная пластина (2) на фиг. 1 б) содержит две пары катушек с углом раскрытия, равным 180°, и сдвинутыми относительно друга на угол 90°, при этом активные длинные проводники двух пар катушек вложены друг в друга через виток по радиусу, соответственно (5), (6), (7) и (8). На обратной стороне подвижная пластина (1) на фиг. 2 б) содержит короткие проводники (9), соединяющие длинные проводники катушки (3), а также короткие проводники (10), соединяющие длинные проводники катушки (4). На обратной стороне неподвижная пластина (2) на фиг. 3 б) содержит: короткие проводники (11), соединяющие длинные проводники катушки (5); короткие проводники (12), соединяющие длинные проводники катушки (6); короткие проводники (13), соединяющие длинные проводники катушки (7); короткие проводники (14), соединяющие длинные проводники катушки (8). На фиг. 4 а) показаны выводы (печатные контакты) катушек (3) и (4) кондуктора (излучателя) подвижной пластины (1) датчика. На фиг. 4 б) показаны выводы (печатные контакты) катушек (5), (6), (7) и (8) приемника неподвижной пластины (2) датчика. Неподвижная пластина (15) и подвижная пластина (16) соответственно с катушками (17) и (18) индукционного вращающегося трансформатора одинаковы и представлены на фиг. 5 а) и б), фиг. 6 а) и б), фиг. 7 а) и б) и на фиг. 8 а) и б). Все пластины (1), (2), (15) и (16) с печатными катушками датчика имеют идентичные реперные сквозные отверстия (19), расположенные по периферии за окружностью печатных катушек (3), (4), (5), (6), (7) и (8).
Опытный образец датчика представлен на фиг. 9, где неподвижные пластины (15) и (2) неподвижно закреплены на деталях корпуса (20), а подвижные пластины (16) и (1) жестко установлены на одном валу (21) вращения. Вал вращения (21) установлен в деталях корпуса датчика (20) с одной степенью свободы, то есть вал (21) может только вращаться. На подвижной пластине (1) датчика расположены две катушки (3) и (4) индуктора (излучателя), которые соединены между собой последовательно и встречно. На неподвижной пластине (2) датчика расположены четыре катушки (5), (6), (7) и (8) приемника, которые соответственно попарно соединены между собой также последовательно и встречно.
Питание датчика осуществляется через вращающийся трансформатор, первичная катушка (обмотка) которого (17) подсоединена к генератору сигнала Ufо, а вторичная катушка (18) (обмотка) подсоединена к последовательно и встречно соединенным катушкам (3) и (4) подвижной пластины (1) датчика.
Дополнительно на фиг. 12 (схеме обработки сигналов датчика) обозначены:
22 - предварительный усилитель канала А (ПУА);
23 - предварительный усилитель канала В (ПУВ);
24 - генератор опорной частоты fо (Г);
25 - синхронный пиковый детектор канала А (СПДА);
26 - синхронный пиковый детектор канала В (СПДВ);
27 - выходной усилитель канала А (ВУА);
28 - выходной усилитель канала В (ВУВ).
Работа индукционного датчика углового положения поясняется следующим. Представленная на фиг. 10 эквивалентная схема индукционного датчика углового положения из одной (единственной) пары подвижной и неподвижной пластин с катушками с электропитанием от подвижной катушки вращающегося трансформатора по сути представляет собой вращающийся дифференциальный трансформатор с двумя выходными сигналами, с несущей частотой fо модулированной амплитуды в зависимости от угла поворота вала датчика. Амплитуда выходных сигналов UA и UB меняется прямо пропорционально изменению углового положения вала. При увеличении UA уменьшается UB, и наоборот, а при переходе сигналов UA и UB через «ноль» фаза несущего сигнала fо меняется на 180° (см. фиг. 11 и фиг. 13). По своей работе предлагаемый датчик аналогичен функционированию синус-косинусного вращающегося трансформатора (СКВТ), и для обработки выходных сигналов датчика могут быть использованы такие же методы, как и для СКВТ, например, метод прямого преобразования по журналу «Современная электроника», №5, 2014 г., с. 30…33, Ануфриев В., Лужбинин А., Шумилин С. Методы обработки сигналов индуктивных датчиков линейных и угловых перемещений - [5]. Для работы индукционного датчика, как и для СКВТ требуется генератор опорного напряжения частотой fо для питания через вращающийся трансформатор обмоток возбуждения (подвижных печатных катушек датчика). Отличие работы СКВТ от работы предлагаемого датчика заключается в форме огибающей амплитуды выходных сигналов частотой fо СКВТ и индукционного датчика углового положения. Для СКВТ форма огибающих пары выходных сигналов (в зависимости от угла порота вала) имеет синусоидальный и косинусоидальный характер, а для предлагаемого датчика (см. фиг. 11 и фиг. 13) оба выходных сигнала (UA и UB) в зависимости от угла поворота вала имеют линейный характер, и также имеют угловой сдвиг в 90°. На фиг. 12 представлена схема обработки сигналов датчика, где ПУ - предварительный усилитель сигналов датчика по каналам А и В, СПД - синхронные пиковые детекторы сигналов, обеспечивающие одновременную фиксацию текущего значения амплитуд сигналов по каналам А и В синхронно с частотой генератора fо, ВУ - входные усилители сигналов по каналам А и В. График изменения напряжения выходных сигналов UA и UB в зависимости от угла поворота представлен на фиг. 13. Линейный характер изменения UA и UB в зависимости от угла поворота по фиг. 13 позволяет использовать для дальнейшей обработки простые решения (например, аналогово-цифровые преобразователи АЦП).
Реально при рабочих частотах порядка 2-х МГц, диаметрах катушек подвижной пластины (1) и катушек неподвижной пластины (2), равных 40 мм, и шаге проводников катушек, шаг проводников катушек (3), (4), (5), (6), (7) и (8) равный 0,6 мм, при ширине проводников 0,3 мм и воздушном зазоре между подвижной и неподвижной частями порядка 0,10 мм. Диапазон изменения выходного сигнала составляет не менее ±0,5 В с погрешностью преобразования не хуже ±1%.
Современная технология печатных плат позволяет изготавливать печатные катушки с высокой степенью точности, в связи с этим, при необходимости получения более высокой точности преобразования, требования к шагу и ширине проводников, а также к воздушному зазору между катушками могут быть и более жесткими.
Как видно из вышеизложенного, наиболее целесообразно использовать такой индукционный датчик углового положения в разнообразных технических системах контроля различных объектов.
Установка подвижных и неподвижных пластин с печатными катушками по заявленному техническому решению обеспечивается технологическим процессом их изготовления, что существенно повышает надежность работы устройства, при упрощении его конструкции и уменьшении себестоимости изготовления.
Полагаем, что предложенный индукционный датчик углового положения обладает всеми критериями изобретения, так как совокупность ограничительных и отличительных признаков формулы изобретения является новым для конструкций индукционных датчиков углового положения и, следовательно, соответствует критерию "новизна".
Совокупность признаков формулы изобретения предложенного устройства неизвестна на данном уровне развития техники и не следует общеизвестным правилам разработки и конструирования индукционных датчиков углового положения, что доказывает соответствие критерию "изобретательский уровень".
Разработка, конструирование и внедрение предложенного индукционного датчика углового положения не представляет никаких конструктивно-технических и технологических трудностей, откуда следует соответствие критерию "промышленная применимость".
Литература
1. Патент РФ 2502046 С1 от 20.12.2013 года, МПК G01B 7/00 - «Индукционный датчик углового положения».
2. Патент РФ2570232 С1 от 10.12.2015 года, МПК G01B 7/30 - «Индукционный датчик углового положения» - прототип.
3. Сафонов Л.Н., Волнянский В.Н., Окулов А.И., Прохоров В.Н. Презеционные датчики угла с печатными обмотками. Библиотека приборостроителя. М., «Машиностроение», 1977, 152 с. - рис. 77 (стр. 114) и рис. 9 (стр. 15).
4. Патент РФ 2584010 от 20.05.2016 года, МПК H01F 38/14 - «Индукционный вращающийся трансформатор».
5. Ануфриев В., Лужбинин А., Шумилин С. Методы обработки сигналов индуктивных датчиков линейных и угловых перемещений / журнал «Современная электроника», №5, 2014 г., с. 30…33.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| Индукционный датчик положения | 2023 |
|
RU2817313C1 |
| ИНДУКЦИОННЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 2014 |
|
RU2584010C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2012 |
|
RU2507474C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК СИЛЫ | 2011 |
|
RU2472122C1 |
| Бескорпусная синхронная вращающаяся электрическая машина с индукционным датчиком углового положения | 2022 |
|
RU2779627C1 |
| Способ производства формованного кокса и шахтная печь для его осуществления | 1987 |
|
SU1825369A3 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ КОМПАРАТОР НАПРЯЖЕНИЯ, ТОКА И МОЩНОСТИ | 2006 |
|
RU2302010C1 |






Изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений с помощью преобразователя перемещения индукционного типа. Сущность изобретения заключается в том, что индукционный датчик углового положения содержит вращающийся трансформатор и установленные с общей осью вращения относительно друг друга с одной степенью свободы неподвижные и подвижные плоские пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими зигзагоподобными катушками индуктивности, при этом датчик содержит одну пару из подвижной и неподвижной пластин, на подвижной пластине содержатся две идентичные катушки, которые расположены равномерно в равных секторах с углом раскрытия, равным 180°, на неподвижной пластине содержатся две пары катушек с углом раскрытия, равным 180°, и сдвинутыми относительно друга на угол 90°, при этом активные длинные проводники двух пар катушек вложены друг в друга через виток по радиусу. Технический результат – упрощение конструкции датчика, уменьшение его габаритов и повышение его надежности и снижение стоимости датчика. 1 з.п. ф-лы, 13 ил.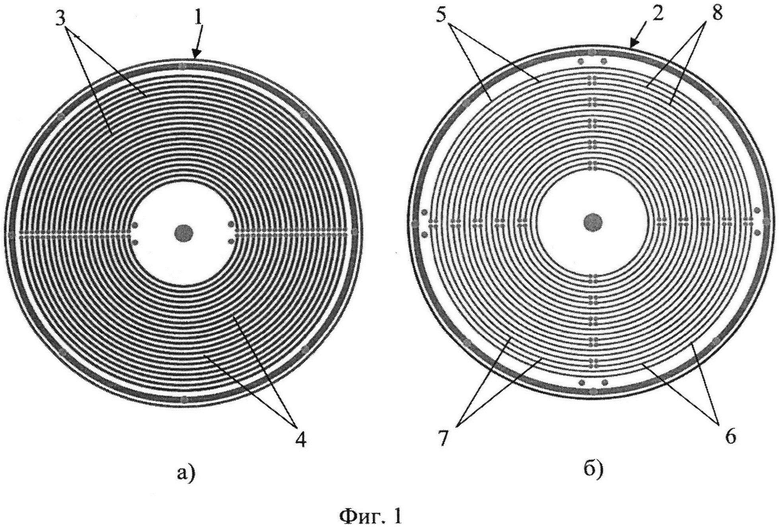
1. Индукционный датчик углового положения, содержащий вращающийся трансформатор и установленные с общей осью вращения относительно друг друга с одной степенью свободы неподвижные и подвижные плоские пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими зигзагоподобными катушками индуктивности, соответственно расположенными по дугам окружности активными длинными проводниками и расположенными по радиусам пассивными короткими проводниками, подвижные пластины жестко установлены на одном валу вращения, пластины с печатными катушками имеют идентичные реперные сквозные отверстия, расположенные по периферии за окружностью печатных катушек, при этом пассивные короткие проводники печатных катушек расположены на обратной стороне пластин и соединены с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий, отличающийся тем, что датчик содержит одну пару из подвижной и неподвижной пластин, на подвижной пластине содержатся две идентичные катушки, которые расположены равномерно в равных секторах с углом раскрытия, равным 180°, на неподвижной пластине содержатся две пары катушек с углом раскрытия, равным 180°, и сдвинутыми относительно друга на угол 90°, при этом активные длинные проводники двух пар катушек вложены друг в друга через виток по радиусу.
2. Индукционный датчик углового положения по п. 1, отличающийся тем, что он снабжен вращающимся трансформатором, выполненным из двух пластин - пары из неподвижной и подвижной пластин с катушками, подвижная пластина закреплена на валу вращения, а ее катушка подсоединена к зигзагоподобным подвижным катушкам индуктора на подвижной пластине датчика.
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| US 6651999 B1, 25.11.2003 | |||
| Индукционный датчик угла | 1974 |
|
SU521636A1 |
| Индукционный датчик | 1986 |
|
SU1315792A2 |
| JP 2014002112 A, 09.01.2014. | |||

