Группа изобретений относится к области радиотехники, а именно к системе и способу для отслеживания объектов в радарных системах, к определению траекторий объектов на основе сигналов, получаемых от бортовой радиолокационной системы. Заявляемые способ и устройство могут быть использованы в радарных системах для уменьшения алгоритмической сложности алгоритма ретроспективного трекинга объектов, в частности, в автомобильном FMCW радаре в ситуации наличия множественных объектов с взаимно пересекающимися траекториями.
Типовой задачей, решаемой в автомобильных радарах, является сбор и обработка информации о параметрах большого количества окружающих объектов. Первичная радиолокационная информация одного цикла зондирования подвергается первичной обработке, в результате которой обнаруживаются сигналы о точечных объектах, которые затем объединяются в кластеры и производится измерение их параметров дальности, скорости и углового положения с соответствующими качеством или погрешностями. Вторичная обработка информации предусматривает определение параметров траектории каждого объекта по сигналам одного или ряда кластеров, включая операции отождествления данных о разных кластерах соответствующим им объектам.
На первичный радиолокационный сигнал, который несет данные, необходимые для последующей обработки, обязательно накладываются помехи, искажающие эту информацию. В связи с этим, в процессе обработки возникают задачи выделения полезных сигналов и получения необходимых сведений в условиях помех. Первичная обработка информации основывается на существовании различий между полезным сигналом и помехой и начинается с обнаружения полезного сигнала на фоне шума. Единичная отметка от кластера лишь приближенно отражает истинное положение объекта или его части в момент локации. По ней еще нельзя принять достоверного решения об обнаружении объекта, тем более судить о параметрах его движения. Для того чтобы принять правильное решение о наличии объекта и определить параметры его движения, необходимо проанализировать информацию, полученную за несколько периодов зондирования (кадров). Основными данными, определяющими траекторию движения объекта, являются пространственные координаты кластеров, изменение которых соответствует закону движения объекта в пространстве. Траектория движения объекта зависит от многих факторов и условий, таких, как тип объектов (пешеход, велосипед, автомобиль, стационарный объект), накладывающих ограничения на скорость, маневренные возможности и т. п. Кроме того, на траекторию движения оказывает влияние ряд случайных факторов, под которыми подразумеваются все причины, искажающие траекторию или затрудняющие ее обнаружение и воспроизведение. Перечисленные и некоторые другие факторы вынуждают отнести движение объекта к категории процессов со случайно изменяющимися во времени параметрами и для статистического описания таких процессов необходимо знать законы распределения вероятности параметров, их определяющих и исходить из более или менее правдоподобной статистической модели движения объектов.
Основными сведениями, определяющими траекторию движения объекта, являются пространственные координаты отметок объекта, изменение которых соответствует закону движения объекта в пространстве. В общем случае движение объекта может быть описано координатами ее центра масс, являющимися случайными функциями времени. На траекторию объекта оказывает влияние целый ряд случайных факторов (помех), под которыми подразумеваются все причины, искажающие траекторию или затрудняющие обнаружение и воспроизведение. Сюда относятся в т.ч. инструментальные ошибки измерения и влияние шумовой составляющей сигнала. В ошибках измерения координат учитывают только случайную составляющую, и они подчинены нормальному закону распределения. Ложные отметки возникают случайно и независимо в пределах всей зоны обзора радара. Обычно предполагается, что ложные отметки распределены по времени равномерно, со средней плотностью, следовательно, можно подсчитать плотность ложных отметок на единицу площади. Таким образом, статистически ложные отметки можно охарактеризовать либо средней плотностью во времени р, либо плотностью v на единицу площади зоны обзора. Отраженные от объектов импульсы в некоторых случаях из-за флуктуации пропадают, что может быть описано законом Пуассона. Перечисленные и некоторые другие факторы вынуждают отнести движение объектов к категории процессов со случайно изменяющимися во времени параметрами. Очевидно, для статистического описания таких процессов необходимо знать законы распределения вероятности параметров, определяющих эти процессы. Однако практически таких законов получить не удается, поэтому приходится задаваться некоторыми гипотезами о статистических характеристиках обрабатываемых сигналов, т.е. исходить из более или менее правдоподобной статистической модели движения объекта, и для автомобильных радаров модели движения объектов представляют собой совокупность участков с прямолинейным и равномерным движением и участков маневра, за основу может быть взята полиномиальная модель движения. Она базируется на представлении процесса изменения координат объекта на ограниченном участке наблюдения в виде полинома в степени n относительно времени.
Таким образом, траектория движения объекта представляется в виде последовательности полиномиальных участков с различными коэффициентами и степенями полиномов. И в любой момент времени ti мы можем вычислить координаты и вектор скорости подвижного объекта и построить траекторию его движения. При передаче информации через канал связи появляются случайные ошибки, они будут фигурировать и в окончательных результатах. Поэтому знания о природе ошибок позволяют учитывать это знание в вычислениях и получать сглаженные (с учетом ошибок) результаты.
Для автомобильных радаров траектория подвижного объекта в общем случае лежит в горизонтальной плоскости. Входные данные (результаты) наблюдения поступают в сферической системе координат. Сам подвижный объект слабо маневренный, т.е. существует промежуток времени, в течение которого он движется прямолинейно и равномерно Т.е. существует базовый промежутком времени t, в течение которого вероятность того, что подвижный объект маневрирует, очень мала. Например, если такт t0 = 0,01 сек, а подвижный объект - автомобиль средняя скорость сближения, с которым составляет 55 м/с (200 км/ч), тогда за один такт автомобиль будет проезжать менее 0,6 метра, что, очевидно, согласуется с нашими предположениями о перемещениях объекта о том, что траектория объекта - ломаная.
Таким образом, задача вторичной обработки информации об объектах ставится в следующем общем виде. По дискретным отметкам - координатам и скорости, полученным с ошибками, необходимо построить сглаженную ломаную - траекторию движения объекта. В общем случае траекторию представляют в виде суммы некоторых функций времени с параметрами, которые содержат случайные величины или сами являются ими, в частности в виде временного полинома, включающего параметры, содержащие случайные величины (ошибки). Предполагается, что суммарный сигнал на входе устройства вторичной обработки информации можно представить в виде аддитивной смеси полезного сигнала (истинной информации о характере изменения координат) и помехи, которая рассматривается как нормально распределенный случайный процесс с известной корреляционной функцией и равным нулю средним значением. Тогда при принятых предположениях поставленная задача сглаживания сводится к оценке математического ожидания полиномиальной функции Y t (H) со случайными коэффициентами по результатам наблюдения одной ее реализации в дискретном ряде точек.
Также задача может быть решена оценкой с помощью функции максимального правдоподобия. Из свойств многомерного нормального распределения имеем, что все одномерные плотности вероятности - это плотности вероятности одномерной нормальной случайной величины с параметрами, определяемыми координатами вектора Y и главной диагональю ковариационной матрицы B (y1 , y2 , …, yn также распределены нормально). Если все коэффициенты корреляционной или ковариационной матрицы B (все ее недиагональные элементы) равны нулю, это означает, что компоненты случайной величины являются независимыми.
Для оценки качества можно руководствоваться методом максимального правдоподобия, на основании которого из всех возможных решений уравнений выбирают такое, которое обращает в максимум плотность вероятности совместного появления именно данной системы измерений. Так как измерения независимы, то по теореме умножения законов распределения плотность вероятности L их совместного появления равна произведению плотности вероятности отдельных результатов измерений.
Метод максимального правдоподобия не всегда приводит к приемлемым результатам, однако в достаточно широком круге практически важных случаев он является в известном смысле наилучшим.
Основным недостатком традиционных методов решения является большая вычислительная сложность при большом количестве точек в первичной радиолокационной информации, что как следствие, приводит к большому количеству кластеров, объектов и возможных траекторий объектов, особенно в ситуации наличия множественных объектов с взаимно пересекающимися траекториями.
Известен способ слежения за объектом [US10281573B1, приор. от 19.05.2014, опубл. 07.05.2019, МПК G01S 13/66 (2006.01), G01S 7/28 (2006.01)], который описывает ретроспективный алгоритм трекинга целей для радиолокационных приложений, в частности, для HFSW радаров. Способ включает следующие этапы: сбор радиолокационных данных с помощью радиолокационного приемника радиолокационной системы; в начальный момент времени t=t0 формирование стандартного радиолокационного трека объекта на основе собранных радиолокационных данных; обновление стандартного радиолокационного трека в течение определенного периода времени; нахождение «качественных» треков с использованием трекера отложенного принятия решений, содержащего три логических уровня продвижения - потенциальные, предварительные, подтвержденные треки. Для «подтвержденных» треков осуществляется повторная обработка предыдущих данных с применением к ним процесса ретродикции (постобработки), с тем чтобы улучшить оценку будущего положения цели, причем процесс ретродикции использует информацию, собранную с первого момента времени t=t0 до текущего момента времени t=tc с целью обновления как минимум одной из предыдущих точек стандартного трека.
Известный способ не учитывает специфики сферы применения автомобильных FMCW радаров, которые в отличие от радиолокационных станций, работающих на больших длинах волн, работает в условиях наличия большого количества одновременно наблюдаемых действительных объектов, траектории которых часто взаимно пересекаются, что приводит к значительному росту вычислительной сложности прямого комбинаторного метода ретроспективного анализа на достаточную историческую глубину трекинга объекта.
Предлагаемый способ, в отличие от известного решения, предполагает использование для обработки информации треков, содержащих последовательность из наблюдаемых и скрытых событий, являющихся упорядоченными по времени, известного решения - алгоритма Витерби. Алгоритм позволяет, по сути, реализовать декодирование, основанное на принципе максимального правдоподобия; однако в нем уменьшается вычислительная нагрузка за счет использования особенностей структуры конкретной решетки кода. Преимущество «мягкого» декодирования Витерби, по сравнению с «жестким» декодированием, заключается в том, что сложность декодера Витерби не является функцией количества символов в последовательности кодовых слов. Алгоритм включает в себя вычисление меры подобия (или расстояния), между сигналом, полученным в момент времени ti, и всеми путями решетки, входящими в каждое состояние в момент времени ti. В алгоритме Витерби не рассматриваются те пути решетки, которые, согласно принципу максимального правдоподобия, заведомо не могут быть оптимальными. Если в одно и то же состояние входят два пути, выбирается тот, который имеет лучшую метрику; такой путь называется выживающим. Отбор выживающих путей выполняется для каждого состояния. Таким образом, декодер углубляется в решетку, принимая решения путем исключения менее вероятных путей. Предварительный отказ от маловероятных путей упрощает процесс декодирования.
Алгоритм Витерби широко используется в распознавании речи, синтезе речи, компьютерной лингвистике и биоинформатике, получил широкое применение в декодировании сверточных кодов мобильных телефонов стандартов GSM и CDMA, dial-up модемах и беспроводных сетях Wi-Fi (стандарта 802.11). Например, известна система и способ для уменьшения неоднозначностей в принимаемых GPS-сигналах [Патент RU 2490666, МПК G01S 19/44], в которой используется декодирование Витерби для обработки информации канала передачи данных Galileo-сигнала. При этом заявителю не известно использование этого метода для использования в радарах для анализа треков отслеживаемых объектов.
Техническим результатом, достигаемым при реализации заявляемого способа, является сокращение времени обработки треков от различных подвижных объектов за счет уменьшения алгоритмической сложности способа анализа трека отслеживаемого объекта с возможностью коррекции оценочного пути объекта апостериорно по мере накопления информации о пути объекта посредством последовательного измерения его параметров. Это позволяет увеличить быстродействие радара, сократить время обновления информации для фиксированного количества объектов или увеличить количество одновременно обрабатываемых объектов при фиксированном времени обновления информации. При этом сохраняется преимущество ретроспективного анализа пути отслеживаемого объекта, заключающееся в возможности коррекции оценочного пути объекта апостериорно по мере накопления информации о пути объекта посредством последовательного измерения ее параметров. Данный эффект достигается путем применения алгоритма Витерби, сокращающего количество рассматриваемых в ретроспективе возможных треков наблюдаемого объекта с исключением наименее вероятных путей согласно выбранной метрике оценки качества трека и, тем самым, снять имеющееся у прототипа ограничение.
Заявляемый способ ретроспективного определения траектории движения объекта характеризуется тем, что:
- с помощью радиолокационного приемника радиолокационной системы собирают и хранят радиолокационные данные о детектированных объектах в предыдущих циклах зондирования за некоторый промежуток времени;
- в начальный момент времени t=t0 формируют стандартный радиолокационный трек объекта на основе собранных радиолокационных данных;
- обновляют стандартный радиолокационный трек в течение определенного периода времени.
Способ отличается тем, что:
- каждому выстраиваемому ретроспективно треку объекта ставят в соответствие решетчатую диаграмму, вершины которой соответствуют детектированным в процессе зондирования объектам, а дугам между ними присвоена оценка правдоподобия данного пути согласно выбранному критерию оценки;
- для получения текущей оценки пути используют только набор наиболее правдоподобных путей объекта, полученных на предыдущем шаге, и объекты, детектированные на текущем шаге;
- наиболее вероятным путем, возвращаемым заявляемым способом, является полученный на текущем шаге путь, имеющий наименьшую суммарную оценку, соответствующую его дугам, полученную согласно выбранному критерию оценки.
Для реализации заявленного способа разработано устройство для ретроспективного анализа пути отслеживаемых объектов.
Заявляемое устройство для ретроспективного определения траектории движения объекта содержит антенную систему из n-передающих и m-приемных антенн, связанную с управляемой микросхемой СВЧ-приемопередатчика, содержащей генератор, обеспечивающий формирование зондирующего радиоволнового излучения с пилообразной частотной модуляцией, подключаемый к любой из n-передающих антенн, усилитель, сигнальный вход которого подключается к любой из m-приемных антенн, а сигнальный выход подключен к первому входу смесителя, второй сигнальный вход смесителя подключен к генератору сигнала, сигнальный выход смесителя подключен ко входу аналого-цифрового преобразователя, выход которого является выходом управляемой микросхемы СВЧ-приемопередатчика и поступает на вход программируемой логической интегральной микросхемы, содержащей аппаратные блоки центрального процессора, цифровой обработки сигналов и встроенную память данных для хранения первичных и промежуточных результатов обработки.
Упростить реализацию блоков устройства за счет снижения требований к ним позволяет использование дополнительных фазовращателя, второго смесителя и второго аналого-цифрового преобразователя. В таком случае генератор подключен к сигнальному входу фазовращателя, сигнальный выход усилителя подключен к первому входу второго смесителя, второй сигнальный вход которого подключен к сигнальному выходу фазовращателя. Сигнальный выход второго смесителя подключен ко входу второго аналого-цифрового преобразователя, выход которого является выходом управляемой микросхемы СВЧ-приемопередатчика.
Сущность группы изобретений поясняется чертежами, где:
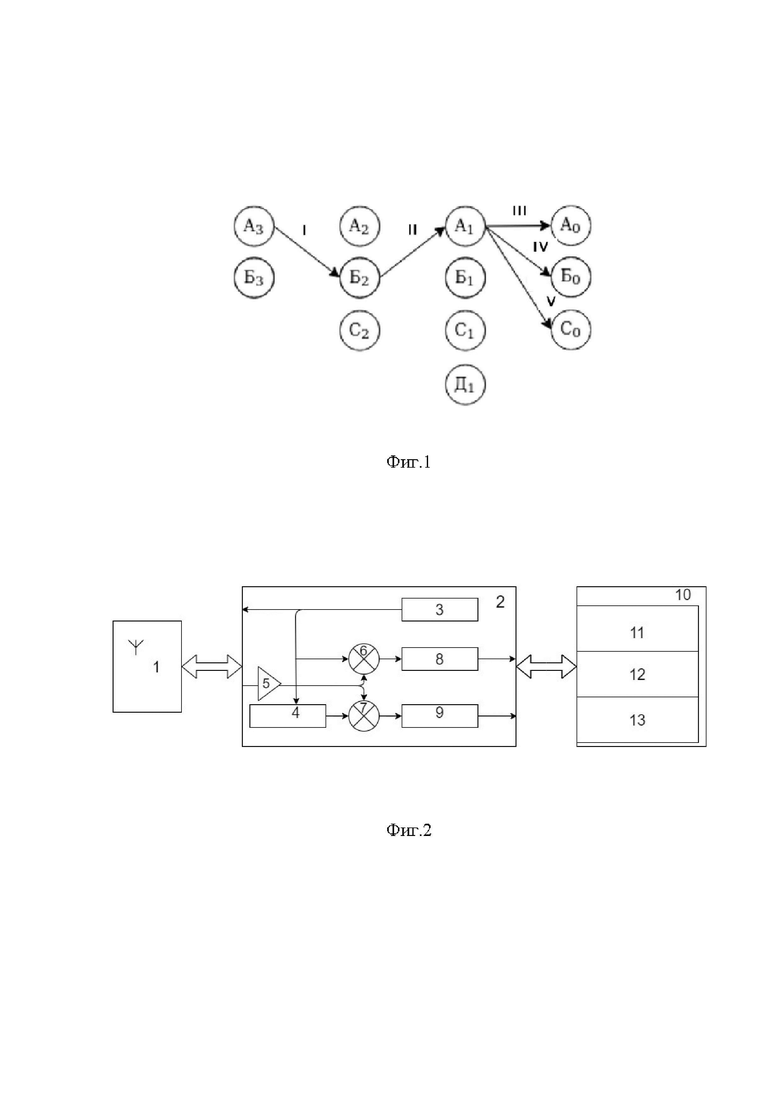
- на Фиг. 1 представлен частный случай решетчатой диаграммы, на которой Аi, Бi, Сi, Дi - вершины решетчатой диаграммы, которым соответствуют детектированные на i-ом интервале зондирования объекты (i = 0 соответствует текущему зондированию, а остальные - предыдущими измерениями); I, II, III, IV ,V - дуги, каждой среди которых сопоставлено соответствующее расстояние Махаланобиса;
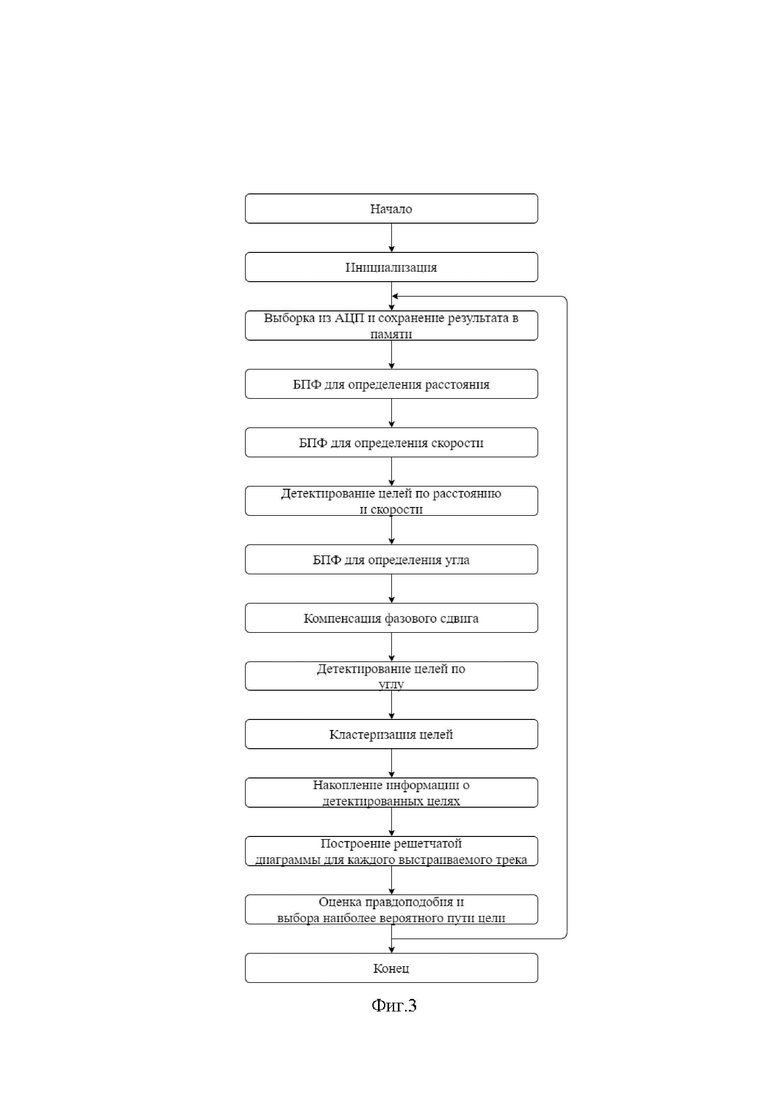
- на Фиг. 2 представлена структурная схема устройства, реализующего предложенный способ;
- на Фиг. 3 представлена блок-схема последовательности операций, иллюстрирующая процесс получения путей отслеживаемых объектов.
Заявляемое устройство (Фиг. 2) содержит антенную систему 1, содержащую n-передающих и m-приемных антенн. Антенная система 1 связана с управляемой микросхемой 2 СВЧ-приемопередатчика, содержащей генератор 3, обеспечивающий формирование зондирующего радиоволнового излучения с пилообразной частотной модуляцией, фазовращатель 4 и усилитель 5. Генератор 3 может быть подключен к любой из n-передающих антенн и к сигнальному входу фазовращателя 4. Сигнальный вход усилителя 5 подключается к любой из m-приемных антенн 1, а сигнальный выход подключен к первому входу смесителей 6, 7. Второй сигнальный вход смесителя 6 подключен к генератору 3 сигнала, второй сигнальный вход смесителя 7 подключен к фазовращателю 4, а сигнальные выходы смесителей 6 и 7 подключены ко входу аналого-цифровых преобразователей 8, 9 (АЦП). В свою очередь выход преобразователей 8 и 9 является выходом управляемой микросхемы СВЧ-приемопередатчика 2 (ИМС) и поступает на вход программируемой логической интегральной микросхемы 10 (ИМС ПЛИС). ИМС ПЛИС 10 содержит аппаратные блоки центрального процессора 11 (CPU), цифровой обработки сигналов 12 (FMCW обработчик) и встроенную память 13 данных для хранения первичных и промежуточных результатов обработки.
Для заявляемого устройства возможна аппаратная реализация, при которой в состав устройства может не входить фазовращатель 4, смеситель 7 и АЦП 9. При данной реализации на вход ИМС ПЛИС 10 будет поступать сигнал с выхода АЦП 8, работающего при данном способе реализации в сравнении с вариантом реализации с двумя АЦП 8 и 9, на вдвое большей частоте преобразования для обеспечения одинакового объема цифрового сигнала, поступающего на вход ИМС ПЛИС 10. Так использование дополнительных фазовращателя 4, смесителя 7 и АЦП 9 позволяет упростить реализацию блоков устройства за счет снижения требований к полосе пропускания усилителя, смесителя и АЦП.
Заявляемый способ может быть реализован различными средствами в зависимости от вариантов применения согласно конкретным признакам и/или примерам. Например, он может быть реализован в аппаратных средствах, микропрограммном обеспечении, программном обеспечении и/или комбинациях вышеозначенного. При реализации в аппаратных средствах блоки обработки могут быть реализованы в одной или нескольких специализированных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, предназначенных для того, чтобы выполнять заявленные функции.
Процесс получения путей отслеживаемых объектов, изображенный на Фиг. 3 включает следующие этапы:
- Инициализация. На данном этапе производится начальное включение и инициализация оборудования;
- Сбор и хранение радиолокационных данных о детектированных объектах в предыдущих циклах зондирования за некоторый промежуток времени. На данном этапе осуществляется выборка данных из АЦП и сохранение результата в памяти. Этап сбора первичной информации обеспечивает подготовку массива сырых предварительных данных, над которыми будет производиться дальнейшая обработка;
- Формирование стандартного радиолокационного трека объекта в начальный момент времени t=t0 на основе собранных радиолокационных данных. На данном этапе выполняются такие операции с данными, как «Быстрое преобразование Фурье (БПФ) для определения расстояния», «БПФ для определения скорости», «Детектирование целей по расстоянию и скорости», «БПФ для определения угла», «Компенсация фазового сдвига», «Детектирование целей по углу», «Кластеризация целей». Этап производит первичную обработку первичных данных, позволяя сформировать данные о точечных объектах присутствующих в поле видимости радиолокатора. А также произвести первичную группировку одиночных точечных данных в кластеры. Сформированный на выходе массив информации содержит данные о положении кластеров в кадре и позволяет сформировать из них стандартный радиолокационный трек;
- Обновление стандартного радиолокационного трека в течение определенного периода времени. На данном этапе выполняется «Накопление информации о детектированных целях». Этап позволяет использовать в работе информацию из нескольких последовательных кадров;
- Оценка правдоподобия и выбор наиболее вероятного пути цели. На данном этапе производится построение решетчатой диаграммы для каждого выстраиваемого трека. Каждому выстраиваемому ретроспективно треку объекта ставится в соответствие решетчатая диаграмма, вершины которой соответствуют детектированным в процессе зондирования объектам, а дугам между ними присваивается оценка правдоподобия данного пути согласно выбранному критерию оценки.
- Формирование текущей оценки пути, для чего используется только набор наиболее правдоподобных путей объекта, полученных на предыдущем шаге, и объекты, детектированные на текущем шаге.
- Определение наиболее вероятного пути, имеющего наименьшую суммарную оценку, соответствующую его дугам, полученную согласно выбранному критерию оценки. В результате выполнения данного этапа формируется наиболее вероятный трек отслеживаемого объекта при этом неправдоподобные треки отбрасываются и не используются в дальнейших вычислениях. Что позволяет увеличить быстродействие радара, сократить время обновления информации для фиксированного количества объектов или увеличить количество одновременно обрабатываемых объектов при фиксированном времени обновления информации.
Заявляемое устройство при реализации способа работает следующим образом.
После подачи на устройство напряжения от источника питания выполняется команда «Инициализация». В соответствии с этой командой осуществляется настройка внешних интерфейсов управляемой микросхемы СВЧ-приемопередатчика 2 и ПЛИС 10, распределение внутренней памяти, установка значений внутренних переменных. При этом со стороны ПЛИС 10 в управляемую микросхему СВЧ-приемопередатчика 2 загружается инициализирующий массив. После этого на этапе «Выборка из АЦП и сохранение результата в памяти» в встроенной памяти 13 в ПЛИС 10 производится сохранение данных, получаемых с АЦП 8 и 9 в результате одного цикла зондирования. Далее полученные данные упорядочиваются в набор двумерных массивов, каждый из которых соответствует уникальной паре приемной и передающей антенн антенной подсистемы 1, и над каждым из них блоком цифровой обработки сигналов 12 производится быстрое преобразование Фурье в двух направлениях (этапы «БПФ для определения расстояния», «БПФ для определения скорости»). После этого блоком 11 выполняется детектирование целей в пространстве расстояние-скорость, для чего может быть использован алгоритм CFAR. Далее, для всех детектированных объектов в пространстве дальность-скорость выделяется набор отсчетов, выбранных из двумерных массивов, полученных от уникальных пар приемных и передающих антенн. Над всеми полученными наборами отсчетов производятся процедуры «БПФ для определения угла», «Компенсация фазового сдвига», «детектирование целей по углу». Результатом выполнения данных операций является набор координат целей в пространстве дальность-скорость-угол, сохраняемый в памяти 13. На этапе «Накопление информации о детектированных целях» блоком 11 производится сохранение в память 13 всех координат детектированных целей, полученных в пределах одного цикла зондирования. Заявляемый способ ретроспективного трекинга объекта использует информацию о детектированных объектах в предыдущих циклах зондирования за некоторый промежуток времени, что обеспечивает возможность использования необходимой для проведения ретроспективной оценки истории измерений. После очередного зондирования наступает этап «Построение решетчатой диаграммы для каждого выстраиваемого трека» на основе накопленной истории таким образом, что каждой вершине в i-м ряду решетки соответствует детектированный объект в i-м интервале зондирования. На этапе «Оценка правдоподобия и выбора наиболее вероятного пути цели» дугам между вершинами i-1-го и i-го шага ставится оценка правдоподобия детектированного объекта выстраиваемому ретроспективно треку, согласно выбранному критерию, например, расстоянию Махаланобиса, что позволяет оценить правдоподобность соответствующего перехода при оценке рассматриваемого пути объекта.
Таким образом, уменьшение алгоритмической сложности ретроспективного трекинга объекта происходит за счет того, что на i-м шаге устройство хранит в памяти N наиболее оптимальных ретроспективных оценок выстраиваемого пути на момент i-1-го шага, и только эти N путей участвуют в построении новых оценочных путей на i-м шаге. Формируемый на устройстве совокупный путь, обладающий наименьшей суммарной оценкой - путь Витерби - принимается устройством как оптимальная ретроспективная оценка выстраиваемого пути на текущем интервале измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| УСТРОЙСТВО ПЕЛЕНГОВАНИЯ С ПЛОСКОЙ АНТЕННОЙ РЕШЕТКОЙ И НЕОДНОЗНАЧНЫМИ ФАЗОВЫМИ ИЗМЕРЕНИЯМИ | 1990 |
|
RU2006873C1 |
| СПОСОБ СЕЛЕКЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С ИЗВЕСТНЫМИ ПОЛЯРИЗАЦИОННЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2256194C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2022 |
|
RU2793338C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
Изобретение относится к радарным системам. Способ ретроспективного определения траектории движения объекта характеризуется тем, что с помощью радиолокационного приемника радиолокационной системы собирают и хранят радиолокационные данные о детектированных объектах в предыдущих циклах зондирования за некоторый промежуток времени, в начальный момент времени t=t0 формируют стандартный радиолокационный трек объекта на основе собранных радиолокационных данных, обновляют стандартный радиолокационный трек в течение определенного периода времени. Каждому выстраиваемому ретроспективно треку объекта ставят в соответствие решетчатую диаграмму, для получения текущей оценки пути используют только набор наиболее правдоподобных путей объекта, наиболее вероятным путём является полученный на текущем шаге путь, имеющий наименьшую суммарную оценку. Устройство для ретроспективного определения траектории движения объекта содержит антенную систему, связанную с управляемой микросхемой СВЧ-приёмопередатчика, содержащей генератор, подключаемый к любой из n-передающих антенн, усилитель, сигнальный вход которого подключается к любой из m-приемных антенн, а сигнальный выход подключен к первому входу смесителя, второй сигнальный вход смесителя подключен к генератору сигнала. Достигается сокращение времени обработки треков от различных подвижных объектов. 2 н. и 1 з.п. ф-лы, 3 ил.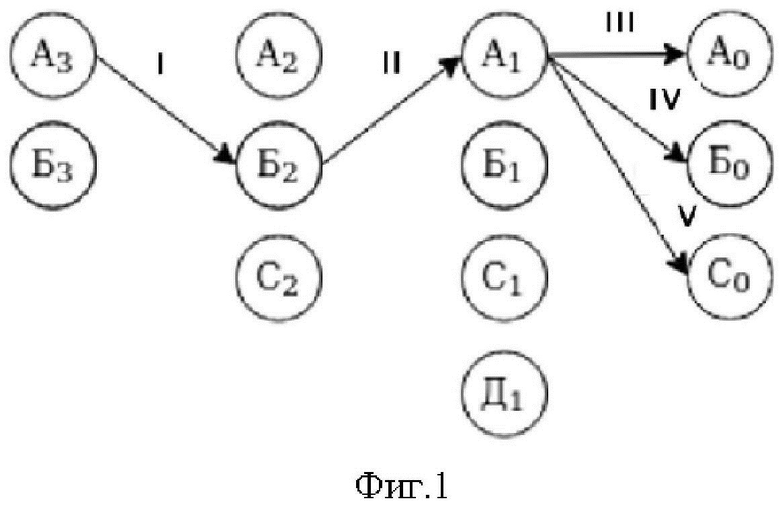
1. Способ ретроспективного определения траектории движения объекта, характеризующийся тем, что:
- с помощью радиолокационного приемника радиолокационной системы собирают и хранят радиолокационные данные о детектированных объектах в предыдущих циклах зондирования за некоторый промежуток времени;
- в начальный момент времени t=t0 формируют стандартный радиолокационный трек объекта на основе собранных радиолокационных данных;
- обновляют стандартный радиолокационный трек в течение определенного периода времени,
отличающийся тем, что
- каждому выстраиваемому ретроспективно треку объекта ставят в соответствие решетчатую диаграмму, вершины которой соответствуют детектированным в процессе зондирования объектам, а дугам между ними присвоена оценка правдоподобия данного пути согласно выбранному критерию оценки;
- для получения текущей оценки пути используют только набор наиболее правдоподобных путей объекта, полученных на предыдущем шаге, и объекты, детектированные на текущем шаге;
- наиболее вероятным путём является полученный на текущем шаге путь, имеющий наименьшую суммарную оценку, соответствующую его дугам, полученную согласно выбранному критерию оценки.
2. Устройство для ретроспективного определения траектории движения объекта, содержащее антенную систему из n-передающих и m-приемных антенн, связанную с управляемой микросхемой СВЧ-приёмопередатчика, содержащей генератор, обеспечивающий формирование зондирующего радиоволнового излучения с пилообразной частотной модуляцией, подключаемый к любой из n-передающих антенн, усилитель, сигнальный вход которого подключается к любой из m-приемных антенн, а сигнальный выход подключен к первому входу смесителя, второй сигнальный вход смесителя подключен к генератору сигнала, сигнальный выход смесителя подключен ко входу аналого-цифрового преобразователя, выход которого является выходом управляемой микросхемы СВЧ-приёмопередатчика и поступает на вход программируемой логической интегральной микросхемы, содержащей аппаратные блоки центрального процессора, цифровой обработки сигналов и встроенную память данных для хранения первичных и промежуточных результатов обработки.
3. Устройство по п.2, отличающееся тем, что генератор подключен к сигнальному входу фазовращателя, сигнальный выход усилителя подключен к первому входу второго смесителя, второй сигнальный вход которого подключен к сигнальному выходу фазовращателя, при этом сигнальный выход второго смесителя подключен ко входу второго аналого-цифрового преобразователя, выход которого является выходом управляемой микросхемы СВЧ-приемопередатчика.
| US 10281573 B1, 07.05.2019 | |||
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| Устройство для распыливания жидкого топлива под давлением сжимаемого в рабочих цилиндрах двигателя внутреннего горения воздуха | 1928 |
|
SU11541A1 |

