Изобретение относится к радиолокации, в частности к способам обнаружения отраженных от объектов сигналов с помощью бортовой аппаратуры летательного аппарата.
Известен способ поиска и обнаружения подводных объектов при помощи бортовых магнитометрических средств, установленных на авиационном носителе (Яроцкий В.А. Методы обнаружения и определения местоположения объектов по их постоянному магнитному полю // Зарубежная радиоэлектроника, №3, стр. 48, 1984). Этот способ включает обследование назначенного района поиска подводного объекта прямолинейными параллельными галсами при помощи скалярного магнитометра, установленного на подвижном носителе. Недостатком указанного способа является небольшая вероятность правильного обнаружения, если курсы движения носителя не согласованы с физическими параметрами, которыми характеризуется район поиска.
Известен способ определения местоположения объекта на местности (Кондратенков Г.С., Фролов А.Ю. Радиовидение // - М: Радиотехника, 2005), при котором с летательного аппарата с помощью радиолокатора с синтезированной апертурой лоцируют местность и формируют ее радиолокационное изображение, затем обнаруживают объекты (см. там же раздел 7.3), проводят их распознавание (см. там же раздел 7.4) и осуществляют привязку объектов к радиолокационному изображению, например, за счет привязки к ориентирам на местности (см. там же раздел 7.5). Такой способ выявления объекта и определения его положения на местности для летательного аппарата трудно реализуем, так как радиолокатор с синтезированной апертурой с необходимыми для этого характеристиками достаточно сложен и, как правило, требует для своей работы специального оператора.
Наиболее близким аналогом является двухчастотный когерентно-корреляционный радиолокатор (патент RU 2332681 C2 от 27.04.2008). Он предназначен для обнаружения отраженных от целей сигналов. В известном радиолокаторе применяют формы зондирующего сигнала-посылки на основе двухчастотных широкополосных шумоподобных дискретных частотно-манипулированных сигналов с непрерывной фазой (ШП ДЧМНФ), формируемых передатчиком, применяют сквозную когерентно-корреляционную обработку отраженного ШП ДЧМНФ сигнала, с использованием нелинейного инвариантного сжатия широкополосного спектра сигнала в узкополосный, близкий к S-функции, и специфической свертки во времени отраженного сигнала. Зондирующий сигнал-посылка передатчика состоит из двух частей, каждая из которых включает набор дискретов. Первая часть посылки состоит из хаотически меняющихся комбинаций дискретов (модулируется шумом); вторая часть посылки представляет собой псевдослучайную последовательную структуру. Отраженный сигнал обрабатывается в приемнике двояким образом. В регенераторе производится сжатие спектра всей длительности отраженного сигнала, т.е. он становится чисто синусоидальным. В схеме свертки во времени обрабатывается только вторая часть отраженного сигнала. Недостатком известного устройства является ограниченная область применения в обнаружении и измерении магнитометрических параметров отраженных от целей сигналов при компенсации вариаций магнитного поля Земли. К недостаткам можно также отнести то, что в системах обнаружения и измерения отслеживание входного возмущения сигналом, созданным типовой следящей системой, сопровождается динамическими ошибками. В этих динамических ошибках есть некоторое принципиальное ограничение применения следящих систем (в том числе с фазовой автоподстройкой частоты и с частотной автоподстройкой). В компенсации входного возмущения следящей петли системы используется сигнал, искусственно инструментально созданный аппаратурой, а не зондирующий сигнал. Приемопередающая антенна не позволяет получить постоянную без провалов диаграмму направленности и равномерный, постоянный коэффициент усиления антенны в широком рабочем диапазоне частот, независимо от принимаемых сигналов на рабочих частотах, что снижает точность измерения параметров сигналов аппаратурой, предназначенной для инструментального контроля при измерении мощностных магнитометрических параметров отраженных от целей сигналов и, кроме того, при приеме отраженных сигналов не учитывают магнитные поля носителей вариаций магнитного поля Земли.
Задачей изобретения является обнаружение объектов техники, регистрация и магнитометрические измерения электромагнитных параметров отраженных от объектов техники сигналов носителей вариации магнитных полей, компенсация вариаций магнитного поля Земли и влияния атмосферных помех.
Техническим результатом изобретения является увеличение точности измерения текущих координат и параметров при увеличении дальности действий обнаружителя с компенсацией вариаций магнитных полей за счет повышения потенциала с уменьшением влияния активных помех за счет сужения результирующей полосы пропускания приемника, структурной чувствительности только к «своим» сигналам.
Для этого в способе обнаружения объектов бортовым обнаружителем заключающемся в том, что с бортового обнаружителя посредством приемопередатчика в сторону объекта излучается линейный частотно-модулированный (ЛЧМ) зондирующий сигнал, а затем принимается отраженный от объекта зондирующий сигнал, по динамическому изменению характеристик параметров отраженного сигнала определяется скорость движения объекта относительно бортового обнаружителя за счет эффекта Доплера fд, после чего отключается ЛЧМ зондирующий сигнал и вносится поправка в характеристики параметров излучаемого f0+fд зондирующего сигнала, осуществляя компенсацию эффекта Доплера, одновременно с приемом отраженного зондирующего сигнала с компенсацией эффекта Доплера приемопередатчик с компенсацией вариаций магнитных полей принимает отраженные сигналы и сравнивает их с базой данных вариаций магнитных полей, накопленных предварительно в соответствующем местоположении, и, с учетом высоты нахождения объекта, по отклонению параметров отраженных сигналов и вариаций магнитных полей делают вывод о наличии объекта, вносящего изменения в вариации магнитных полей и формируют сигнал с откорректированными параметрами вариаций магнитных полей, которые накладывают на излучаемый зондирующий сигнал для осуществления компенсации вариаций магнитных полей.
Носители вариаций магнитного поля Земли, промышленные и военные объекты, надводные и подводные объекты, размещенные на земле, с большой вероятностью можно отнести к стационарным объектам.
В этом случае при обнаружении на земле объекта с вариациями магнитного поля или электромагнитным излучателем необходимо при получении параметров объекта учитывать вариации магнитного поля Земли, а также влияние атмосферы, а затем вносить необходимые поправки в расчеты.
Для исключения помех на пути распространения радиоволн от передатчика до объекта излучения и обратно необходимо построение системы обнаружителя с перестраиваемой частотой излучаемого сигнала передатчиком таким образом, чтобы отраженный от объекта сигнал был бы с постоянной частотой, а доплеровский сдвиг обнаружителя аномалий электромагнитных полей инструментально компенсировался, как объекта перемещения, размещенного на летательном аппарате.
Заявленное изобретение решает задачу обнаружения и измерения магнитометрических и электромагнитных параметров магнитных полей объектов, носителей вариаций магнитного поля Земли, с учетом компенсации вариаций магнитного поля Земли при компенсации доплеровского смещения во время приема зондирующего сигнала, для распознавания объектов, скрытых на поверхности земли, под землей, на поверхности воды. Заявленное изобретение осуществляет работу в магнитном пространстве, окружающем Землю, в атмосфере распространения радиоволн, например, в тропосфере, стратосфере и ионосфере, в рабочем диапазоне волн. Измерение и проверка магнитометрических и электромагнитных параметров каждого источника излучения осуществляется индивидуально и последовательно.
Поиск источников излучения во время мониторинга земной поверхности может проводиться бортовой специальной аппаратурой (БСА), размещенной на летательных аппаратах. При обнаружении неизвестного источника излучения в пределах диаграммы направленности антенны летательного аппарата, представляющего интерес с целью получения параметров объекта - источника излучения с учетом коррекции вариации магнитометрических и электромагнитных параметров помех, БСА может формировать управляющий сигнал для инициализации бортового обнаружителя с компенсацией вариаций магнитных полей, высотометра и измерителя магнитного поля Земли. Управляющий сигнал поступает на вход передатчика и обнаружителя с компенсацией вариаций магнитных полей Земли и, одновременно, включает высотомер. Полученные данные поступают в систему обработки информации, где обрабатываются, запоминаются и поступают в бортовую вычислительную машину (БВМ) бортовой специальной аппаратуры летательного аппарата для использования по назначению.
Сущность изобретения поясняется чертежами.
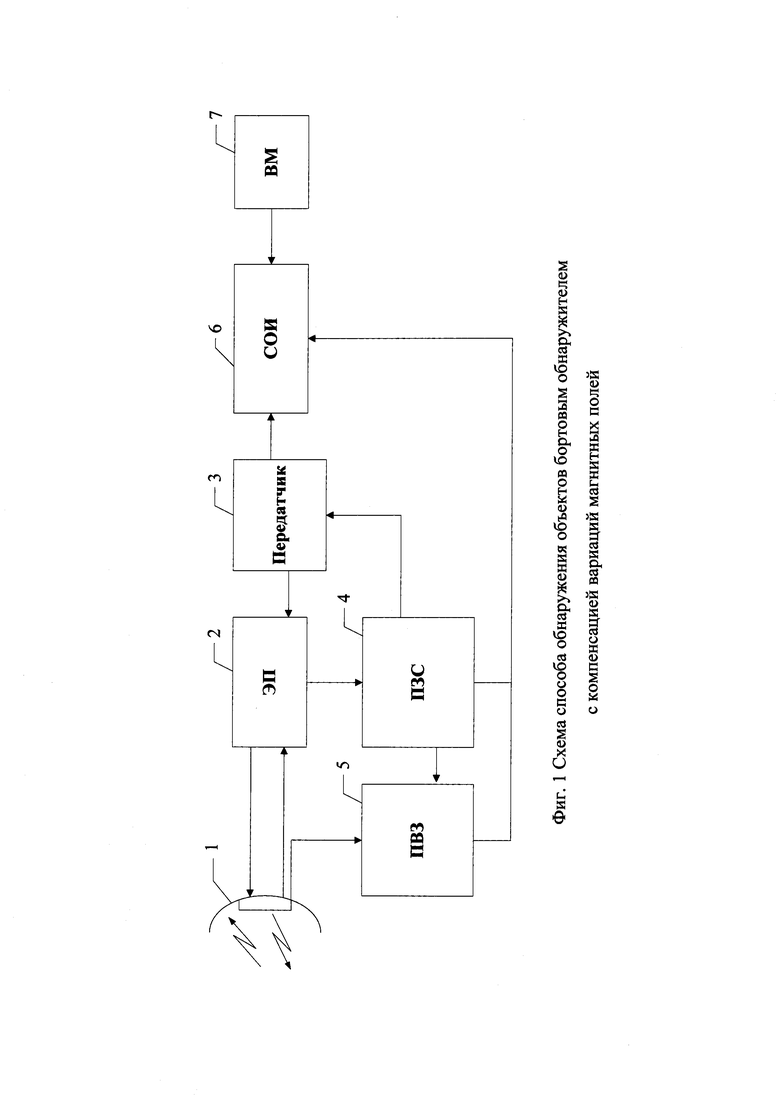
На фиг. 1 изображена схема способа обнаружения объектов бортовым обнаружителем с компенсацией вариаций магнитных полей:
1 - антенное устройство;
2 - электронный переключатель;
3 - передатчик зондирующих импульсов с компенсацией допплеровского смещения частоты излучаемого сигнала;
4 - приемник отраженного зондирующего сигнала;
5 - приемник вариаций магнитного поля земли;
6 - система обработки информации;
7 - высотомер.
Передатчик 3 с компенсацией доплеровского смещения частоты предназначен для формирования короткого, относительно длительности зондирующей посылки, сигнала передатчика с линейным изменением частоты и компенсации доплеровского смещения частоты отраженного от объекта сигнала путем изменения частоты зондирующих сигналов -двухчастотных частотно-манипулированных шумоподобных сигналов PN MSK (Pseudo Noise Minimum Shift Keying) передатчика с индексом частотной модуляции D=2 fдТд=0,5, т.е. реализуется работа на частотах f0 и f1, органически объединенных в единую когерентно работающую структуру обработки частотно-манипулированных шумоподобных сигналов.
Приемник 4 отраженного зондирующего сигнала электромагнитного излучения от объекта - узкополосный, предназначен для приема отраженного от цели сигнала, создания управляющего сигнала передатчиком для его приостановки, линейного изменения частоты, фиксации (запоминания) в момент t1 и при перемещении приемника, в составе бортового обнаружителя с компенсацией вариаций магнитных полей, к цели или от нее, отслеживания доплеровского смещения частот, которое меняется на относительно малую величину fД и отражается на выходной частоте сигнала приемника f0+fД, полученная поправка fД после преобразования и суммирования с запомненной частотой поступает на вход передатчика для обеспечения автоматического управления за доплеровским смещением частоты бортового обнаружителя с компенсацией вариаций магнитных поле.
Приемник 5 вариаций магнитного поля Земли предназначен для обеспечения в реальном масштабе времени регистрации с измерением относительного уровня напряженности магнитного поля вариации магнитного поля Земли и влияния атмосферных помех, магнитных аномалий в окружающей Землю атмосфере в областях, оказывающих влияние на распространение радиоволн: тропосферу, стратосферу и ионосферу. Указанные явления определяют условия передачи и приема зондирующих сигналов и распространения радиоволн и в одних случаях они использованы, а в других учтены при работе радиолиний.
Антенное устройство 1 предназначено для излучения зондирующего сигнала с линейно растущей частой, осуществлении поиска объекта цели в пределах диаграммы направленности антенны, а при появлении объекта в момент t1 антенное устройство переключается управляющим сигналом приемников 4, 5 в режим передачи или приема.
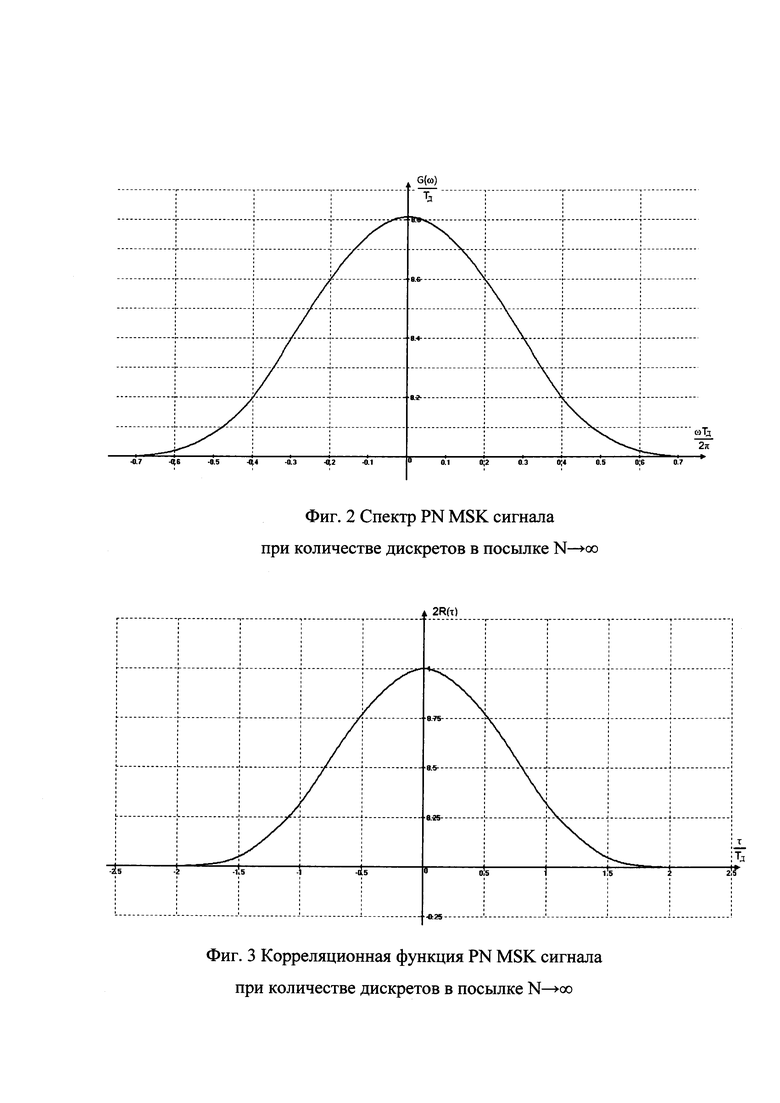
Сущность заявленного способа заключается в поиске, при котором решается задача обнаружения и измерения магнитометрических и электромагнитных параметров магнитных полей объектов, носителей вариаций магнитного поля Земли, отраженных от объектов с учетом компенсации вариаций магнитного поля Земли при компенсации доплеровского смещения во время приема зондирующего сигнала, измерении дальности, измерении эффективной площади рассеяния (ЭПР) для распознавания объектов - источников излучения во время мониторинга земной поверхности бортовой специальной аппаратурой (БСА), размещенной на летательном аппарате. При обнаружении материального объекта или источника излучения в пределах диаграммы направленности антенны летательного аппарата, представляющего интерес с целью получения информации о стационарном или перемещающемся объекте на Земле или в воздушном пространстве, а также параметров объекта излучения с учетом коррекции магнитометрических и электромагнитных параметров помех, БСА летательного аппарата формирует управляющий сигнал для инициализации бортового обнаружителя с компенсацией вариаций магнитных полей в рабочий режим излучения зондирующего сигнала и рабочий режим высотометра. Управляющий сигнал поступает на вход передатчика 4 и запускается РЛС с компенсацией вариаций магнитных полей и одновременно включается высотомер 7. Определение вариаций магнитного поля Земли осуществляется после переключения электронного переключателя 2 в режим приема отраженного от объекта зондирующего сигнала одновременно с приемником 4 сигнала электромагнитного излучения магнитной или электромагнитной аномалии. Обнаружитель с компенсацией вариаций магнитных полей реализован в виде двухчастотного когерентно-корреляционного устройства, использующего дискретные шумоподобные частотно-манипулированные сигналы PN MSK (Pseudo Noise Minimum Shift Keying) с непрерывной фазой и индексом частотной манипуляции D=0,5. (фиг. 2 и фиг. 3). Эти сигналы имеют определенную структуру во временной и спектральной областях и она заключается в том, что огибающие временной функции, огибающие спектра и корреляционной функции являются гладкими кривыми, не имеющими боковых лепестков, при условии большого количества дискретов N, следовательно, и функция неопределенности обладает единственным максимумом в центре спектрально-временной плоскости
Простейшее аналитическое выражение PN MSK сигнала:

при  ,
,
где Δω=2πΔƒ - отклонение частоты текущего дискрета от средней;
Тд - период модулирующей последовательности;
D=2Δf ТД=0,5 - индекс частотной манипуляции MSK сигналов;
 - средняя частота дискретов;
- средняя частота дискретов;
а=(-1,+1);
k=1, 2, 3, … N - количество дискретов в посылке.
Спектр и корреляционная функция PN MSK сигнала вычисляются по известным формулам:


Спектр PN MSK сигнала при N→∞ изображен на фиг. 2.
Корреляционная функция PN MSK сигнала при N→∞ изображена на фиг. 3.
Использование в обнаружителе с компенсацией вариаций магнитных полей сигналов PN MSK обеспечивает необходимые требования для улучшения технических характеристик устройства. Применение PN MSK сигналов позволяет реализовать:
- меньшую ширину спектра, а, следовательно, меньшую требуемую полосу частот;
- почти полное отсутствие боковых лепестков в спектре и корреляционной функции при большом числе дискретов;
- бóльшую помехоустойчивость вследствие меньшего влияния нелинейностей радиоприемного тракта;
- отсутствие зависимости измеряемой дальности от доплеровского смещения частоты;
- увеличение эффективной отражающей поверхности за счет двухчастотного облучения;
- уменьшаются боковые лепестки диаграммы направленности антенного устройства, что позволяет получить постоянную, без провалов диаграмму направленности и равномерный, постоянный коэффициент усиления антенны в широком рабочем диапазоне частот.
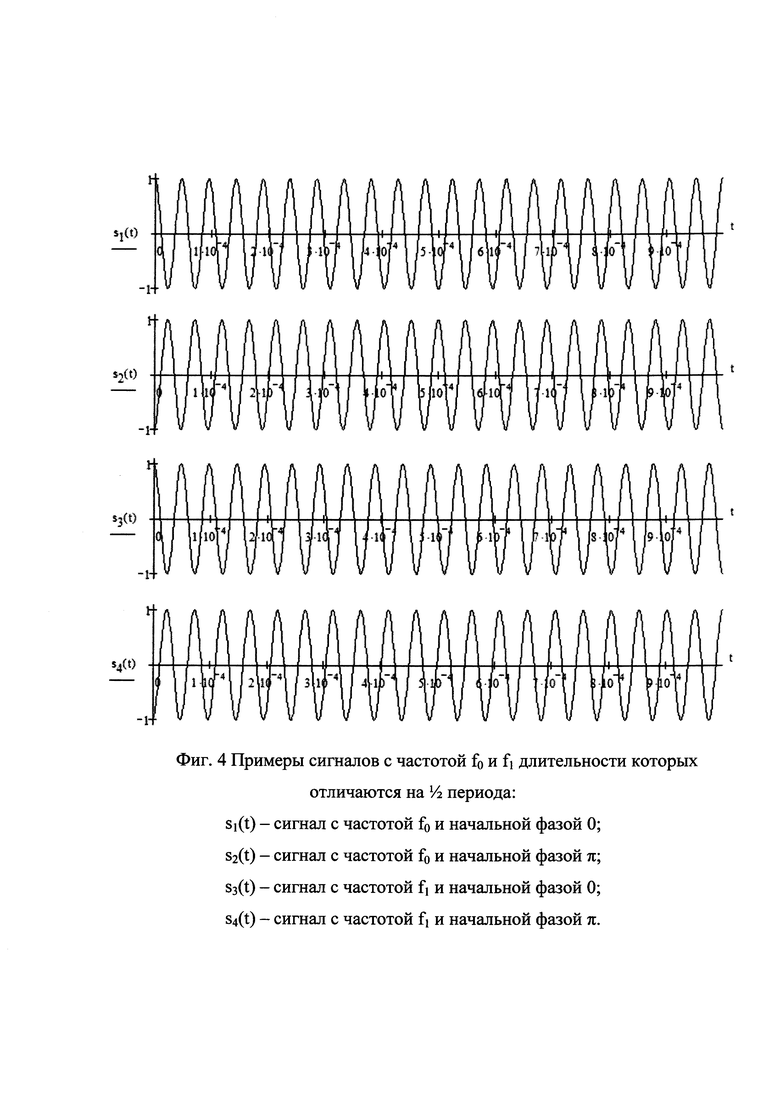
Управляющий сигнал для инициализации обнаружителя с компенсацией вариаций магнитных полей поступает на вход передатчика и переводит в рабочий режим его составные части. В это время формирователь двухчастотный при выполнении необходимого условия PN MSK сигнала, что индекс частотной манипуляции D=2Δf Тд=0,5, формирует значение частот, соответствующих логическим «0» и «1» которые отличаются на величину, равную половине частоты модулирующей последовательности. Таким образом, за один период псевдослучайной последовательности (ПСП) длительности сигналов f0 и f1 должны отличатся на 1/2 периода. Для «сшивки» фаз без скачков требуется два сигнала с частотой f0 и f1 с начальной фазой 0 и два сигнала с такими же частотами, сдвинутые по фазе на π. Примеры сигналов приведены на фиг. 4.
Здесь: s1(t) - сигнал с частотой f0 и начальной фазой 0; s2(t) - сигнал с частотой f0 и начальной фазой π; s3(t) - сигнал с частотой f1 и начальной фазой 0; s4(t) - сигнал с частотой f1 и начальной фазой π.
Для передачи значения «1» используется сигнал с частотой f0, значения «-1» - с частотой f1. Последовательность начинается с сигнала с начальной фазой 0: s1(t) для значения «1» и s3(t) для значения «-1». В последующих дискретах используются сигналы в соответствии с таблицей 1.
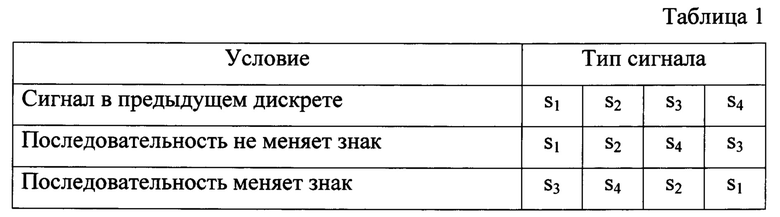
В результате получается частотно-манипулированный сигнал без скачков фаз.
Сигналы, поступающие с генератора пилообразного образного напряжения, обеспечивают параметры зондирующих сигналов с линейно нарастающей частотой, которые поступают затем в цифро-аналоговый преобразователь для последующего формирования посылок в соответствии с дискретом, приведенным в таблице 1. Сформированная структура зондирующего сигнала в электронном коммутаторе поступает на вход узкополосного усилителя мощности. Затем усиленный в узкополосном усилителе мощности зондирующий сигнал, через электронный переключатель и приемопередающий тракт поступает в антенное устройство и излучается в пространство для обнаружения объекта. При появлении на входе электронного переключателя отраженного от объекта цели сигнала в пределах приема диаграммой направленности антенного устройства, например, в момент времени t1, электронный переключатель переводит РЛС с компенсацией вариаций магнитных полей в режим приема. Излучение зондирующего сигнала передатчиком в момент времени t1 прекращается. В режиме приема в момент времени t1 одновременно через направленный разветвитель подключаются приемник 5 зондирующего сигнала электромагнитного излучения от объекта и приемник 6 вариаций магнитного поля Земли. Для извлечения информации из посылки осуществляется синхронизация методом квадрирования (удвоением частоты) PN MSK сигнала и обработка принятого сигнала путем расширения спектра и переноса в другую область частот с изменением коэффициента частотной манипуляции с D=0,5 до D=1, при котором возникают две спектральные составляющие на частотах 2f0 и 2f1 которые и используются для синхронизации. За счет сохранения когерентности разность этих спектральных составляющих равна удвоенной частоте следования дискретов 2FT. Для восстановления частот дискретов и удвоенной средней частоты используется регенерация несущих частот дискретов, работающая по принципу взаимно перекрестного гетеродинирования.
По принятому входному сигналу осуществляют обработку - обнаружение отраженного сигнала, измерение текущих координат и параметров сопровождаемой цели. Вырабатывают управляющий сигнал для переключения антенного устройства 1 в режим излучения приемопередающего устройства. В этот момент времени одновременно с переключением антенного устройства отключается зондирующий сигнал передатчика 4. Отраженный от объекта - электромагнитной аномалии сигнал в этой посылке будет иметь частоту эталона, а зондирующий сигнал с передатчика 4 с пилообразной частотой отключается, осуществляется принудительная компенсация доплеровского смещения. Объект, от которого принят отраженный сигнал, «не перемещается» в пространстве, в его сигнале отсутствует доплеровское смещение частоты и, как следствие, возникает условие работы приемника на постоянной частоте f0. После этого все отраженные от объекта - электромагнитной аномалии сигналы будут иметь частоту эталона f0 в течение всего оставшегося сеанса связи. Таким образом, осуществляется инструментальная компенсация доплеровского смещения.
Постоянство рабочей частоты радиолокационного канала позволяет неограниченно увеличивать длительность зондирующего сигнала до непрерывного, повышая потенциал передатчика во много раз, и превращает систему обнаружителя аномалий электромагнитных полей из нестационарной с переменными параметрами в стационарную с постоянными параметрами. Схема свертки в приемнике 5 отраженного зондирующего сигнала во времени осуществляет уточнение дальности R путем укорочения второй части посылки с N ТД до длительности одного дискрета.
Корректировка параметров радиолокационной системы с компенсацией вариаций магнитных полей с учетом измерения высоты высотомером 7 проводится в режиме приема отраженного зондирующего сигнала приемником зондирующего сигнала электромагнитного излучения с одновременно работающим приемником - определителем вариаций магнитного поля Земли.
Приемник 5 вариаций магнитного поля Земли в реальном масштабе времени начинает регистрировать относительный уровень напряженности магнитного поля вариации магнитного поля Земли и уровень напряженности магнитного поля Земли при поступлении управляющего сигнала на вход передатчика и блока управления запуском обнаружителя с компенсацией вариаций магнитных полей и одновременно на направленный разветвитель для включения высотомера. Определение параметров значения магнитного поля Земли осуществляется после переключения электронного переключателя 2 в режим приема отраженного от объекта зондирующего сигнала одновременно с приемником 5 зондирующего сигнала электромагнитного излучения.
В момент времени t1 электронный переключатель 2 переводит систему с компенсацией вариаций магнитных полей в режим приема. В соответствии с заложенной программой формируются сигналы управления, по которым определяют вариаций магнитного поля Земли, которые осуществляются одновременно с определением уровня напряженности магнитного поля Земли. После поступления управляющего сигнала определяются и фиксируются вариации магнитного поля с помощью матрицы, представляющей собой нанокомпозитный мультиферроидный материал в виде упорядоченных 3D-нанорешеток с использованием кристаллитов размерами примерно от 15 до 50 нм. Практическая значимость подобных материалов определяется тем, что их самоорганизующимися свойствами можно управлять через вариации размера шаров SiO2, а также составом и строением синтезируемых в полостях материалов. Для формирования нанокомпозитов использовались образцы опаловых матриц с диаметром наношаров SiO2 от 260 до 280 нм. Метатитанаты (BaTiO3, SrTiO3, NiTiO3, PbTiO3, FeTiO3) синтезируются из введенных в полости опаловых матриц растворов нитратов соответствующих металлов. Матрица предназначена для изменения модификации магнитного состояния и характера ее доменной структуры после воздействия на нее внешними импульсными вариациями магнитного поля. Сигналограммы вариаций с амплитудным значением с матричного преобразователя магнитного поля, с размещенными на них магниточувствительными элементами матрицы, под действием вариаций внешнего импульсного магнитного поля Земли с напряженностью, равной напряженности поля, создаваемого импульсными вариациями, фиксируют измененный характер доменной структуры матрицы.
Магниточувствительные элементы матрицы в этот момент передают пространственную картину структуры и магнитные изменения вариации со стороны основного направления и эту информацию передают на магниточувствительную сторону преобразователя магнитного поля.
Все полученные значения в цифровом виде: уровень напряженности магнитного поля Земли; уровень напряженности вариаций магнитного поля Земли и амплитудные значения принятого отраженного зондирующего сигнала поступают в бортовую вычислительную аппаратуру, в которой вычисляют и обрабатывают параметры объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| СПОСОБ РАДИОЛОКАЦИИ И РАДИОЛОКАТОР С ДОПЛЕРОВСКИМ ПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2580507C2 |
| ДВУХЧАСТОТНЫЙ КОГЕРЕНТНО-КОРРЕЛЯЦИОННЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2332681C2 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2313477C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
Изобретение относится к радиолокации, в частности к способам обнаружения отраженных от объектов сигналов с помощью бортовой аппаратуры летательного аппарата. Техническим результатом изобретения является увеличение точности измерения текущих координат и параметров при увеличении дальности действий обнаружителя с компенсацией вариаций магнитных полей за счет повышения потенциала с уменьшением влияния активных помех за счет сужения результирующей полосы пропускания приемника, структурной чувствительности только к «своим» сигналам. Для этого в способе обнаружения объектов бортовым обнаружителем, заключающемся в том, что с бортового обнаружителя посредством приемопередатчика в сторону объекта излучается линейный частотно-модулированный (ЛЧМ) зондирующий сигнал, а затем принимается отраженный от объекта зондирующий сигнал, по динамическому изменению характеристик параметров отраженного сигнала определяется скорость движения объекта относительно бортового обнаружителя за счет эффекта Доплера fд, после чего отключается ЛЧМ зондирующий сигнал и вносится поправка в характеристики параметров излучаемого f0+fд зондирующего сигнала, осуществляя компенсацию эффекта Доплера, одновременно с приемом отраженного зондирующего сигнала с компенсацией эффекта Доплера приемопередатчик с компенсацией вариаций магнитных полей принимает отраженные сигналы и сравнивает их с базой данных вариаций магнитных полей, накопленных предварительно в соответствующем местоположении, и, с учетом высоты нахождения объекта, по отклонению параметров отраженных сигналов и вариаций магнитных полей делают вывод о наличии объекта, вносящего изменения в вариации магнитных полей и формируют сигнал с откорректированными параметрами вариаций магнитных полей, которые накладывают на излучаемый зондирующий сигнал для осуществления компенсации вариаций магнитных полей. 1 табл., 4 ил.
Способ обнаружения объектов бортовым обнаружителем, заключающийся в том, что с бортового обнаружителя посредством приемопередатчика в сторону объекта излучается линейный частотно-модулированный (ЛЧМ) зондирующий сигнал, а затем принимается отраженный от объекта зондирующий сигнал, по динамическому изменению характеристик параметров отраженного сигнала определяется скорость движения объекта относительно бортового обнаружителя за счет эффекта Доплера fд, после чего отключается ЛЧМ зондирующий сигнал и вносится поправка в характеристики параметров излучаемого f0+fд зондирующего сигнала, осуществляя компенсацию эффекта Доплера, одновременно с приемом отраженного зондирующего сигнала с компенсацией эффекта Доплера приемопередатчик с компенсацией вариаций магнитных полей принимает отраженные сигналы и сравнивает их с базой данных вариаций магнитных полей, накопленных предварительно в соответствующем местоположении, и, с учетом высоты нахождения объекта, по отклонению параметров отраженных сигналов и вариаций магнитных полей делают вывод о наличии объекта, вносящего изменения в вариации магнитных полей, и формируют сигнал с откорректированными параметрами вариаций магнитных полей, которые накладывают на излучаемый зондирующий сигнал для осуществления компенсации вариаций магнитных полей.
| СПОСОБ РАДИОЛОКАЦИИ И РАДИОЛОКАТОР С ДОПЛЕРОВСКИМ ПЕРЕДАТЧИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2580507C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И РАДИАЛЬНОЙ СКОРОСТИ В РЛС С ЗОНДИРУЮЩИМ СОСТАВНЫМ ПСЕВДОСЛУЧАЙНЫМ ЛЧМ ИМПУЛЬСОМ | 2014 |
|
RU2553272C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНОГО ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2008 |
|
RU2413957C2 |
| СПОСОБ КОНТРОЛЯ ВАРИАЦИЙ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2012 |
|
RU2525474C2 |
| US 6516272 B2, 04.02.2003 | |||
| DE 4243669 A1, 30.06.1994. | |||

