Настоящее изобретение относится в целом к системам для загрузки и/или выгрузки текучих сред для судов, обычно называемым морскими системами загрузки/налива. Данные системы используются для перекачки текучего продукта между судном и причалом или между двумя судами.
Текучий продукт означает жидкий или газообразный продукт.
Более точно, настоящее изобретение относится к устройству для предоставления информации о положении муфты и для выдачи аварийного сигнала при перемещении подобной системы загрузки и/или выгрузки.
Обычно морские загрузочные системы имеют конец трубопровода для перекачки текучих сред, который прикреплен к основанию и соединен с резервуаром для текучей среды, подлежащей перекачке, и противоположный конец трубопровода, который является подвижным и снабжен муфтой, выполненной с возможностью присоединения к целевой трубе, которая сама присоединена к резервуару для текучей среды.
Перемещение подвижной муфты регулируется приводными механизмами, управление которыми осуществляется посредством управляющего устройства, предназначенного для оператора.
При перемещении муфты слишком далеко от основания существует риск повреждения системы, в частности вследствие разрыва или столкновения. При перемещении муфты слишком далеко от основания во время выдвигания/удлинения существует риск разрыва системы. При повороте муфты относительно основания, в частности, когда несколько загрузочных систем расположены параллельно на причале, существует риск столкновения с соседними загрузочными системами: используется термин «повреждение из-за столкновения». Кроме того, также существует риск разрыва при повороте.
Для избежания повреждения или разрыва морской загрузочной системы на определенных типах загрузочных устройств были предусмотрены устройства аварийной сигнализации.
В общих чертах настоящее изобретение направлено на совершенствование данных устройств аварийной сигнализации для устройств для загрузки текучих сред, предназначенных для судов.
Известны две группы систем для загрузки текучих сред, которые различаются своей конструкцией: системы для перекачки посредством жестких труб и системы для перекачки посредством гибких труб.
В группе систем для перекачки посредством жестких труб можно различить системы с загрузочными рукавами и пантографные системы.
Загрузочный рукав представляет собой шарнирно-сочлененную конструкцию с системами труб, имеющую основание, соединенное с резервуаром для текучей среды, на котором первая труба, названная внутренней трубой, закреплена посредством части трубы с 90-градусным коленом, обеспечивающей возможность поворота одного из ее концов вокруг вертикальной оси и поворота другого конца вокруг горизонтальной оси. На противоположном конце внутренней трубы вторая труба, названная наружной трубой, закреплена с возможностью поворота вокруг горизонтальной оси. Муфта установлена на конце наружной трубы. Регулирование каждого из трех поворотов осуществляется посредством силового гидроцилиндра или гидравлического двигателя.
Известно, что в случае загрузочных рукавов для включения аварийных сигналов используются бесконтактные датчики приближения объекта. Данные бесконтактные датчики приближения объекта расположены у основания для аварийных сигналов, относящихся к повороту внутренней трубы относительно основания, и на внутренней и наружной трубе для включения аварийных сигналов во время удлинения загрузочного рукава. На практике работа подобных бесконтактных датчиков приближения объекта проста: кулачок, установленный на элементе загрузочного рукава, проходит перед соответствующим бесконтактным датчиком приближения объекта, который сам прикреплен к другому элементу загрузочного рукава и который обеспечивает включение одного или нескольких аварийных сигналов. В соответствии с позиционированием датчиков аварийный сигнал включается, например, тогда, когда система слишком удлинена или имеет слишком большой угол относительно основания.
Датчик данного типа дает только информацию типа включено/выключено, то есть аварийные сигналы включаются, когда действия оператора вызывают выход загрузочного рукава из заранее заданной зоны, названной рабочей зоной. Другими словами, оператор будет проинформирован посредством аварийного сигнала только тогда, когда он выйдет за пределы рабочей зоны, но он не имеет никакой информации, когда он находится в пределах указанной рабочей зоны или рядом с границей рабочей зоны.
Другая известная система, предназначенная для загрузочного рукава, содержит датчики угла, расположенные на различных подвижных элементах загрузочного рукава. Это позволяет в любой момент времени иметь представление об относительных углах каждого элемента загрузочного рукава относительно соседнего элемента или относительно вертикали посредством использования маятниковых датчиков и определять тем самым положение муфты относительно основания, и, исходя из этого, делать вывод о том, существует ли необходимость во включении аварийного сигнала или нет.
Данные устройства аварийной сигнализации обеспечивают возможность включения аварийного сигнала с большей или меньшей степенью тревожности и, кроме того, в определенных случаях обеспечивают возможность инициирования последовательностей действий в аварийных ситуациях. Кроме того, данные устройства обеспечивают возможность включения аварийных сигналов или последовательностей действий в аварийных ситуациях с упреждением, когда загрузочный рукав приближается к границе рабочей зоны со скоростью, превышающей заданную скорость.
Пантографные системы подобно загрузочным рукавам имеют основание, соединенное с резервуаром. Кран установлен на данном основании с возможностью поворота. Кран имеет стрелу, несущую трубу для текучей среды. На конце стрелы смонтирован пантограф, состоящий из шарнирно соединенных труб для текучей среды и обеспечивающий возможность перемещения муфты, которая установлена на свободном конце пантографа. Наклон пантографа регулируется посредством поворота на конце стрелы. Перемещение пантографа регулируется посредством гидравлических двигателей и посредством силового гидроцилиндра для поворота на основании.
Известно, что в случае пантографных систем бесконтактные датчики приближения объекта обеспечивают включение систем, применяемых для поворота относительно основания, и проволочный датчик или датчик относительного отсчета обеспечивает включение систем, применяемых для перемещения вдоль длины стрелы и длины пантографа в развернутом состоянии.
В большинстве случаев устройства аварийной сигнализации для загрузочных систем с жесткими трубами имеют другие недостатки.
Загрузочная система должна обязательно иметь конструкцию с точной кинематикой, известной заранее, для обеспечения возможности рационального размещения на ней датчиков угла, датчиков положения и/или датчиков перехода за заданное положение.
Необходимо разместить датчики между каждыми шарнирно соединенными элементами от основания до муфты для получения информации о положении муфты относительно основания. Таким образом, датчики зависят от конструкции загрузочной системы. Накопленная ошибка данной «цепи» датчиков оказывает отрицательное влияние на точность позиционирования муфты.
В заключение, системы с гибкими трубопроводами обычно имеют трубопровод, по которому перекачивается текучий продукт, и механическую систему, обеспечивающую возможность манипулирования трубопроводом. Существует несколько типов систем манипулирования, но во всех случаях они включают в себя манипулирующий кран или конструкцию, которая обеспечивает опору для муфты, предназначенной для соединения гибких трубопроводов.
До сих пор не существует никаких систем измерения расстояния, обеспечивающих возможность включения аварийных сигналов для систем с гибкими трубопроводами.
В общих чертах, настоящее изобретение относится к обеспечению усовершенствования устройства, предназначенного для предоставления информации о положении муфты морской загрузочной системы, которая выполнена с возможностью перемещения относительно ее основания, для повышения точности информации о положении и для упрощения известных устройств, и, кроме того, относится к разработке устройства для предоставления информации о положении подвижной муфты, выполненного с возможностью адаптации к любому типу морской загрузочной системы, не оснащенной им, независимо от того, выполнена ли она с конструкцией с жесткими трубами или с гибкими трубами.
Для этого разработано устройство для предоставлении информации о положении по меньшей мере одной подвижной муфты морской загрузочной системы, при этом система содержит по меньшей мере один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию, и подвижный конец трубопровода, снабженный муфтой, выполненной с возможностью присоединения к целевой трубе, причем муфта или элемент, расположенный непосредственно рядом с муфтой, содержит по меньшей мере одно средство для предоставления информации о положении муфты,
при этом устройство выполнено с возможностью взаимодействия непосредственно со средством, предназначенным для предоставления информации о положении основания и расположенным на основании или на элементе, расположенном непосредственно рядом с основанием, для предоставления информации об относительном положении муфты непосредственно относительно основания на основе информации о положении основания,
или выполнено с возможностью предоставления информации об абсолютном положении муфты в пространстве, и при основании, имеющем фиксированное положение в пространстве, устройство содержит вычислительное средство, обеспечивающее возможность вычисления информации об относительном положении муфты непосредственно относительно основания на основе информации об абсолютном положении муфты и данных о положении основания, зафиксированного в пространстве.
В настоящем изобретении предпочтительно используются средства, обеспечивающие возможность или предоставления информации о положении муфты непосредственно относительно основания, или вычисления относительного расстояния, на котором находится муфта непосредственно относительно основания, посредством сбора информации об абсолютном положении муфты.
Предпочтительно, что в обоих случаях измерения больше не базируются на положении элементов загрузочной системы относительно друг друга, а базируются на положении муфты непосредственно относительно основания. Это создает возможность обеспечения свободы в отношении типа механической конструкции, которая может быть предусмотрена между основанием и муфтой (например, рукав или пантограф), и, таким образом, позволяет легко адаптировать данную систему к любому типу морской загрузочной системы с равным успехом как при использовании систем перекачки посредством жестких трубопроводов, так и при использовании систем перекачки посредством гибких трубопроводов. При использовании устройства согласно изобретению точность информации о положении муфты будет выше, поскольку отсутствуют промежуточные датчики. Это делает устройство согласно изобретению более простым и более точным, чем известные устройства.
В соответствии с предпочтительным признаком изобретения устройство содержит вычислительные средства, выполненные с возможностью:
- вычисления в реальном времени информации о положении муфты относительно основания, и при этом вычислительные средства имеют данные, определяющие границы по меньшей мере одной разрешенной зоны позиционирования для муфты;
- проверки в реальном времени того, находится ли муфта в пределах разрешенной зоны,
- выдачи определенного аварийного сигнала, когда муфта выйдет из соответствующей разрешенной зоны.
Таким образом, границы разрешенных зон или рабочих зон определяются виртуально вычислительными средствами. Отсутствует необходимость в обеспечении наличия датчиков или переключателей, физически расположенных на загрузочной системе для определения границ подобных зон. Они могут быть легко параметризованы посредством вычислительных средств.
Это обеспечивает возможность повышения безопасности использования за счет аварийных сигналов, включаемых более точно. Кроме того, существует возможность обеспечения множества разрешенных зон, например, перекрывающих друг друга, имеющих разные степени риска в процессе работы и соответствующих разным аварийным сигналам в соответствии с тем, сопряжена ли работа в рассматриваемой зоне с большим или меньшим риском.
Под элементами, расположенными непосредственно рядом, понимаются элементы морской загрузочной системы, которые являются неподвижными или подвижными соответственно относительно муфты или основания, но находятся достаточно близко к ним, какой бы ни была геометрическая конфигурация загрузочной системы, для выдачи точной информации об относительном положении муфты относительно основания, в частности, для выдачи определенного аварийного сигнала, когда муфта выйдет из разрешенной зоны, которая была параметризована.
В соответствии с предпочтительным признаком изобретения вычислительные средства выполнены с возможностью вычисления в реальном времени скорости перемещения муфты и включения аварийного сигнала с упреждением, когда муфта приближается к границе соответствующей разрешенной зоны со скоростью, превышающей заданную скорость (то есть слишком быстро).
Это предпочтительно обеспечивает возможность повышения безопасности использования посредством аварийных сигналов, включаемых с упреждением, когда муфта слишком быстро перемещается по направлению к границе разрешенной зоны.
В соответствии с предпочтительными признаками, которые могут быть объединены:
- средство для предоставления информации о положении муфты включает в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи информации об абсолютном положении муфты в пространстве;
- средство для предоставления информации о положении основания включает в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи информации об абсолютном положении основания, при этом вычислительные средства выполнены с возможностью вычисления относительного положения муфты относительно основания на основе информации об абсолютном положении муфты и основания;
- устройства для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), представляют собой устройства, предназначенные для коммуникации друг с другом для непосредственного предоставления информации об относительном положении муфты относительно основания вычислительным средствам;
- одно из средств для предоставления информации о положении муфты или основания включает в себя оптическое устройство, выполненное с возможностью взаимодействия соответственно с основанием или муфтой или с мишенью, которая зафиксирована соответственно относительно основания или относительно муфты, посредством излучения светового луча, такого как лазерный луч, по направлению к основанию или к муфте, или к мишени, которая зафиксирована соответственно относительно основания или муфты, и обнаружения отраженного луча и измерения времени прохождения луча для получения, исходя из этого, информации об относительном положении муфты непосредственно относительно основания;
- одно из средств для предоставления информации о положении муфты или основания представляет собой оптическую камеру, выполненную с возможностью выдачи вычислительным средствам изображения соответственно основания или муфты, или мишени, которая зафиксирована соответственно относительно основания или муфты, при этом вычислительные средства выполнены с возможностью обработки изображения, выданного камерой, для вычисления относительного положения муфты относительно основания;
- указанное по меньшей мере одно средство для предоставления информации о положении муфты или основания включает в себя по меньшей мере один шнур, натянутый посредством использования бобины между муфтой и основанием, и по меньшей мере один датчик угла и/или по меньшей мере один датчик длины размотанного шнура на бобине, выбранные для предоставления вычислительным средствам информации, обеспечивающей возможность вычисления относительного положения муфты относительно основания.
Когда загрузочная система содержит несколько трубопроводов, их основания расположены параллельно на одном и том же причале, и соответствующие муфты соединены с целевыми трубами, расположенными параллельно на одном и том же судне. В данном случае расстояния между муфтами больше не варьируются, поскольку они соединены с целевыми трубами, присоединенными к одному и тому же судну. В этом случае целесообразно проверять возможные изменения расстояния между муфтами по отношению друг к другу для контроля непротиворечивости информации, предоставляемой разными средствами для предоставления информации о положении муфт, и для надлежащего управления данными средствами.
Для этого в соответствии с настоящим изобретением предпочтительно разработано устройство, содержащее вычислительные средства, которые в том случае, когда загрузочная система содержит несколько трубопроводов, и при этом их основания расположены на одном и том же причале, и соответствующие муфты присоединены к целевым трубам, расположенным на одном и том же судне, выполнены с возможностью
вычисления расстояний между муфтами непосредственно после присоединения комплекта муфт к соответствующим целевым трубам на основе информации о положении муфт,
сохранения указанных расстояний в качестве контрольных расстояний,
вычисления в реальном времени расстояний между муфтами на основе информации о положении муфт,
сравнения в реальном времени вычисленных расстояний с контрольными расстояниями,
выдачи аварийного сигнала, когда вычисленные расстояния изменяются по отношению к контрольным расстояниям с выходом за заданное пороговое значение.
Подобное сравнение обеспечивает возможность идентификации средства для предоставления информации о положении дефектной муфты.
В соответствии с другим аспектом изобретения разработан способ для вычислительных средств устройства, подобного описанному выше, включающий в себя следующие вычислительные операции:
- вычисление в реальном времени информации о положении муфты относительно основания, и при этом вычислительные средства имеют данные, определяющие границы по меньшей мере одной разрешенной зоны позиционирования для муфты,
- проверку в реальном времени того, находится ли муфта в пределах разрешенной зоны,
- выдачу определенного аварийного сигнала, когда муфта выходит из соответствующей разрешенной зоны.
В соответствии с еще одним аспектом изобретения разработано вычислительное устройство для устройства, подобного описанному выше, которое выполнено с возможностью:
- вычисления в реальном времени информации о положении муфты относительно основания, и при этом вычислительные средства имеют данные, определяющие границы по меньшей мере одной разрешенной зоны позиционирования для муфты,
- проверки в реальном времени того, находится ли муфта в пределах разрешенной зоны,
- выдачи определенного аварийного сигнала, когда муфта выходит из соответствующей разрешенной зоны.
Далее разъяснение изобретения будет продолжено в подробном описании одного варианта осуществления, приведенном ниже в качестве неограничивающего примера, со ссылкой на сопровождающие чертежи. На чертежах:
фиг.1 представляет собой схематический вид в перспективе загрузочного рукава, снабженного устройством согласно изобретению,
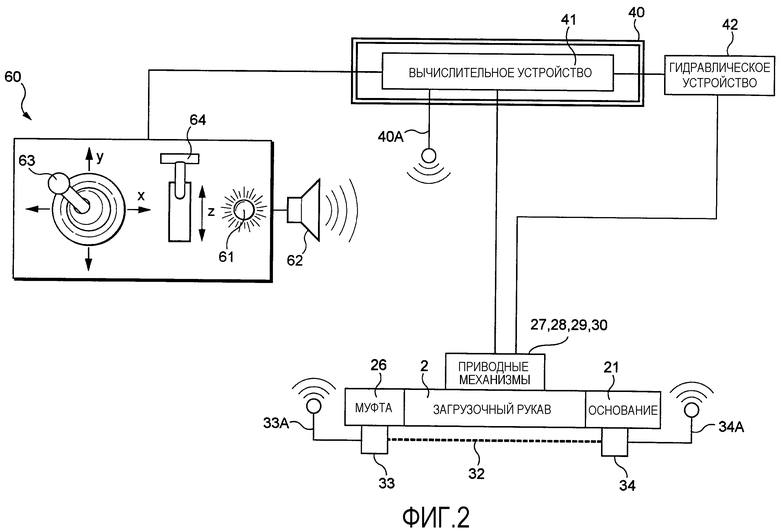
фиг.2 представляет собой обзорную схему работы рукава согласно фиг.1,
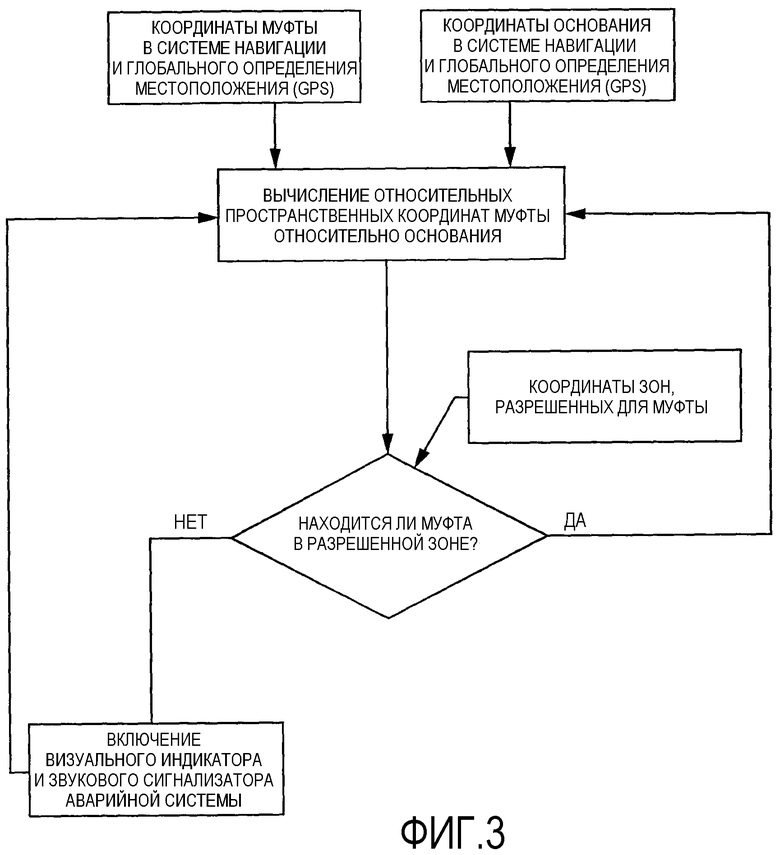
фиг.3 представляет собой функциональную схему для представления общего принципа работы управляющего устройства согласно фиг.1 и 2,
фиг.4 представляет собой схематический вид в перспективе другого варианта выполнения загрузочного рукава, снабженного устройством согласно изобретению.
Фиг.1 представляет собой очень схематичное изображение загрузочного рукава 2, снабженного управляющим устройством 1 согласно изобретению. Изображение загрузочного рукава здесь очень упрощено, и в этой связи следует отметить, что устройство для предоставления информации о положении согласно изобретению может адаптироваться к любому типу морской загрузочной системы, в частности к загрузочным системам, описанным выше.
Загрузочный рукав согласно фиг.1 имеет основание 21, соединенное с резервуаром для текучей среды, который расположен под поверхностью 22, на которой зафиксировано основание и которая может представлять собой, например, поверхность причала или палубы судна. На вершине основания шарнирно, с возможностью поворота, присоединена коленчатая труба 23, к которой в свою очередь шарнирно присоединена первая труба, называемая внутренней трубой 24, противоположный конец которой шарнирно соединен со второй трубой, называемой наружной трубой 25. Конец наружной трубы несет муфту 26, выполненную с возможностью присоединения к целевой трубе (не показана).
В изображенном варианте осуществления как таковым известным образом муфта имеет три степени свободы при повороте относительно конца наружной трубы. В данном варианте осуществления данные три поворота являются свободными, так что оператор может свободно регулировать угол муфты во время конечной фазы приближения для присоединения муфты к целевой трубе.
В альтернативном непоказанном варианте осуществления управление одним или несколькими из данных поворотов осуществляется посредством приводных механизмов, которые присоединены к командному интерфейсу для того, чтобы дать возможность оператору непосредственно управлять поворотами при конечном приближении муфты.
Как таковым известным образом муфта в данном варианте осуществления содержит фиксирующие захваты 31, которые закрываются посредством приводного механизма 30, изображенного очень схематично, для удерживания муфты 26 вокруг целевой трубы, как только они будут соединены.
В целом данный тип загрузочного рукава сам по себе известен и не будет описан здесь более подробно. Кроме того, следует отметить, что устройство согласно изобретению адаптируется ко всем морским загрузочным системам и что адаптация управляющего устройства согласно изобретению к любому другому типу загрузочной системы, в частности, к одной из систем, описанных выше, находится в пределах способностей специалиста в данной области техники.
В устройстве согласно изобретению, подобном схематически изображенному на фиг.1, приводные механизмы 27, 28, 29 предусмотрены у каждого из трех шарнирных соединений загрузочного рукава (символически изображенные двойными стрелками А, В, С). Более точно, первый приводной механизм 27 предусмотрен между вершиной основания 21 и коленчатой трубой 23 для поворота коленчатой трубы 23 в горизонтальной плоскости относительно основания, второй приводной механизм 28 предусмотрен между концом коленчатой трубы 23 и внутренней трубой 24 для поворота внутренней трубы в вертикальной плоскости, и третий приводной механизм 29 предусмотрен между внутренней трубой 24 и наружной трубой 25 для обеспечения поворота наружной трубы 25 в вертикальной плоскости.
Три приводных механизма 27, 28, 29 представляют собой гидравлические цилиндры, изображенные очень схематично на фиг.1. В варианте, который не проиллюстрирован, один или несколько из гидравлических цилиндров заменены гидравлическими двигателями. В соответствии с другим вариантом, который не проиллюстрирован, приводные механизмы представляют собой электрические или пневматические двигатели.
Основание 21 предусмотрено с блоком 34, заключающим средство для предоставления информации о положении основания, которое в данном варианте осуществления представляет собой устройство системы для глобального определения местоположения типа GPS, обеспечивающее возможность выдачи абсолютного положения и, более точно, пространственных координат основания.
То же самое применимо для муфты 26, которая содержит блок 33, заключающий устройство системы для глобального определения местоположения типа GPS, обеспечивающее возможность выдачи абсолютного положения и, более точно, пространственных координат присоединительного конца муфты. Альтернативно, блок 33 расположен на элементе, расположенном непосредственно рядом с муфтой, таком как одна из труб, шарнирно присоединенных к концу рукава. На практике вычислительные средства выполнены с возможностью экстраполяции информации о положении самой муфты, исходя из данных от средства для предоставления информации о положении, расположенного на элементе, расположенном непосредственно рядом.
Вычислительные средства управляющего устройства соединены с вычислительным устройством 41, расположенным в шкафу 40 электрического управления.
Гидравлическая станция 42 предусмотрена для снабжения приводных механизмов гидравлической энергией, необходимой для их работы. Управление гидравлической станцией 42 осуществляется посредством вычислительного устройства 41.
Кроме того, блоки 33 и 34 соответственно предусмотрены с отражающей мишенью и излучателем/приемником лазерного луча 32, выполненным с возможностью предоставления информации о расстоянии между основанием и муфтой. На практике, время прохождения лазерного луча измеряется для определения расстояния.
Кроме того, каждый из блоков 33 и 34 соответственно предусмотрен с радиопередающим устройством 33А и 34А для передачи сигнала, содержащего информацию о положении. Вычислительное устройство соединено с принимающим устройством 40А, выполненным с возможностью приема указанных сигналов от передатчиков 33А и 34А. Кроме того, управляющее устройство содержит командный интерфейс 60 для оператора, предназначенный для управления перемещением муфты по осям x, y, z, которые можно видеть на фиг.1.
Как можно видеть более детально на фиг.2, на обзорной схеме работы устройства согласно фиг.1 вычислительное устройство 41 соединено с принимающим устройством 40А, которое представляет собой радиоприемник, выполненный с возможностью сообщения с радиопередающими устройствами 33А и 34А, соответственно соединенными с блоками 33 и 34 муфты и основания. Таким образом, блоки обеспечивают предоставление вычислительному устройству информации о положении муфты и основания посредством использования устройств системы для глобального определения местоположения типа GPS и посредством использования лазерного луча 32 и соответствующего излучателя и приемника.
В альтернативном варианте осуществления, устройства для системы для глобального определения местоположения типа GPS представляют собой устройства, предназначенные для сообщения друг с другом для предоставления непосредственно вычислительному устройству информации об относительном положении муфты относительно основания.
В альтернативном варианте осуществления, когда основание прикреплено к причалу, имеется только одно устройство системы для глобального определения местоположения типа GPS. Оно расположено у муфты для выдачи координат ее абсолютного положения, и предусмотрено вычислительное средство для вычисления координат относительного положения муфты непосредственно относительно основания, исходя из координат положения основания, которое зафиксировано в пространстве, и исходя из координат абсолютного положения муфты. Действительно, поскольку основание зафиксировано в пространстве, его координаты известны и, следовательно, отсутствует необходимость в обеспечении наличия устройства глобальной системы навигации и определения местоположения (GPS) у основания.
Гидравлическая станция 42 снабжает приводные механизмы гидравлической энергией, необходимой для их работы. Вычислительное устройство управляет гидравлической станцией 42 посредством реле мощности для управления запуском и остановом гидравлической станции. Гидравлическая станция содержит насос (непоказанный), выполненный с возможностью перекачивания рабочей жидкости для гидравлических систем для снабжения приводных механизмов.
Как можно видеть более детально на фиг.2, командный интерфейс 60 соединен с вычислительным устройством 41, чтобы обеспечить для оператора возможность управления перемещением муфты по осям x и y посредством рычага 63 и по оси z посредством рычага 64, при этом оси схематически изображены на фиг.1. Вычислительное устройство передает соответствующие команды приводным механизмам 27, 28, 29, которые обеспечивают управление перемещениями загрузочного рукава 2. В показанном варианте осуществления приводные механизмы представляют собой пропорциональные приводные механизмы, и рычаги 63 и 64 представляют собой рычаги пропорционального управления. Вычислительное устройство выполнено с возможностью вычисления команд для каждого из приводных механизмов так, что пропорциональная команда по одной из осей, выданная посредством одного из рычагов, приводит к пропорциональному перемещению муфты вдоль соответствующей оси.
Кроме того, командный интерфейс содержит визуальный индикатор 61 аварийного состояния и звуковой сигнализатор 62. Визуальный индикатор 61 и звуковой сигнализатор 62 включаются, когда муфта выходит из разрешенной зоны, параметризованной в вычислительном устройстве 41.
Как можно видеть более детально на фиг.3, координаты зон, разрешенных для муфты, параметризованы в вычислительном устройстве 41. В соответствии с координатами, представленными посредством блоков 33 и 34, вычислительное устройство вычисляет относительные пространственные координаты муфты относительно основания, затем сравнивает данные координаты с координатами зон, разрешенных для муфты. Когда муфта расположена в разрешенной зоне, вычислительное устройство переходит к циклическому вычислению относительных пространственных координат муфты относительно основания в реальном времени в соответствии с координатами, предоставленными ему посредством блоков 33 и 34, которые обеспечивают возможность определения перемещения муфты за это время.
В том случае, когда вычислительное устройство определит, что муфта не находится в разрешенной зоне, оно обеспечивает включение визуального индикатора аварийного состояния и звукового сигнализатора.
Другими словами, вычислительное устройство вычисляет в реальном времени информацию о положении муфты относительно основания в соответствии с перемещениями муфты и информацией, предоставленной средствами для предоставления информации о положении муфты, и в вычислительном устройстве параметризованы данные, определяющие границы по меньшей мере одной зоны позиционирования, разрешенной для муфты, при этом вычислительное устройство выполнено с возможностью проверки в реальном времени того, находится ли муфта в разрешенной зоне, и с возможностью в случае необходимости включения аварийного сигнала. Предпочтительно то, что факт наличия подобных разрешенных зон или рабочих зон позволяет избежать риска повреждения системы, в частности, вследствие разрыва или столкновения, когда муфта переместится слишком далеко от основания во время удлинения или поворота.
Использование лазерного луча 32 обеспечивает возможность получения очень точной информации о расстоянии между основанием и муфтой. Данная информация учитывается вычислительным устройством во взаимосвязи с координатами муфты в глобальной системе навигации и определения местоположения (GPS) для вычисления относительных координат муфты относительно основания с большей точностью.
В этой связи следует отметить, что устройство согласно изобретению работает с одним типом средств для предоставления информации о положении, например, посредством глобальной системы навигации и определения местоположения (GPS). В варианте, представленном здесь, применение двух типов средств для предоставления информации о положении посредством объединения глобальной системы навигации и определения местоположения (GPS) и лазера позволяет воспользоваться преимуществами двух разных технологий для получения более точной и более надежной информации о положении.
Когда информация о расстоянии, полученная посредством использования лазерного луча, расходится с информацией о расстоянии, полученной посредством вычислений на основе координат в глобальной системе навигации и определения местоположения (GPS), на величину, превышающую определенную пороговую величину, которая задана заранее и параметризована в вычислительном устройстве, вычислительное устройство информирует оператора об этом посредством выдачи соответствующего аварийного сигнала, например, светового или звукового аварийного сигнала. Это обеспечивает повышение надежности устройства.
Предпочтительно, если лазер представляет собой лазер следящего типа, то есть лазер, который выполнен с возможностью сопровождения его мишени, например, муфты, и предоставления непосредственно вычислительному устройству информации о расстоянии между ним самим и его мишенью по трем осям x, y и z.
Лазерный луч и соответствующая операция, подобная описанной выше, были опущены на фиг.3 для ясности.
В соответствии с вариантом осуществления, который не показан, две разрешенные зоны, перекрывающие друг друга, параметризованы в вычислительном устройстве. Первая зона не представляет никакой особой опасности для муфты, и вторая разрешенная зона создает сравнительно малую степень опасности. Как только муфта оставляет данную вторую зону, степень опасности становится выше. Когда муфта входит во вторую зону, индикатор и звуковой сигнал включаются периодически для предупреждения пользователя о том, что он выходит из свободной от риска зоны в зону умеренного риска. Когда муфта выходит из данной второй зоны, индикатор и звуковой сигнализатор будут включены постоянно для индикации оператору того, что степень опасности высока.
Предпочтительно, если в соответствии с вариантом осуществления, который не проиллюстрирован, вычислительное устройство выполнено с конфигурацией, обеспечивающей возможность запрещения выдачи управляющих команд на перемещение приводных механизмов, результатом выполнения которых было бы обеспечение выхода муфты из разрешенной зоны. Таким образом, даже если оператор выдаст подобную управляющую команду, муфта не оставит разрешенную зону.
Предпочтительно, если в соответствии с вариантом осуществления, который не показан, вычислительное устройство является программируемым для задания границ рабочих зон и/или запрещенных зон, которые могут быть параметризованы оператором в соответствии с каждой операцией загрузки или выгрузки текучих продуктов. Это обеспечивает возможность, например, адаптации операции автоматического соединения с разными судами, которые могут иметь разные возможные зоны столкновения.
В соответствии с вариантом осуществления, который не показан, вычислительное устройство выполнено с возможностью вычисления в реальном времени скорости перемещения муфты и с возможностью включения аварийного сигнала с упреждением, когда муфта приближается к границе соответствующей разрешенной зоны слишком быстро. Скорости и расстояния относительно границы соответствующей разрешенной зоны параметризованы в вычислительном устройстве.
В варианте осуществления, который не показан, несколько морских загрузочных систем соединены с одним и тем же вычислительным устройством 40, и на командном интерфейсе предусмотрен переключатель для избирательного управления присоединением одной или другой из загрузочных систем, связанных с вычислительным устройством. Рабочие зоны, соответствующие соседним загрузочным системам, запрограммированы так, чтобы избежать столкновений между разными загрузочными системами.
Фиг.4 представляет собой схематический вид в перспективе другого варианта осуществления загрузочного рукава, снабженного устройством для предоставления информации о положении муфты согласно изобретению, в котором средство для предоставления информации о положении муфты представляет собой шнур, натянутый между основанием и муфтой.
На одном из своих концов шнур 75 содержит средства для крепления его к муфте. Другой конец шнура прикреплен к барабану бобины 72, которая смонтирована на основании. Бобина содержит датчик 73 относительного отсчета, обеспечивающий возможность определения длины размотанного шнура, при этом данная информация передается в вычислительное устройство, которое, исходя из нее, определяет расстояние между муфтой и основанием.
Кроме того, датчик 74 угла шнура предусмотрен для шнура 75 для определения наклона шнура относительно по меньшей мере двух опорных углов. Датчик угла предусмотрен с передающим устройством 74А для сообщения с принимающим устройством 40А, соединенным с вычислительным устройством 41. Датчик 73 относительного отсчета соединен с вычислительным устройством 41 посредством проводного соединения.
Таким образом, существует возможность определения относительного положения муфты относительно целевой трубы, исходя из двух опорных углов и расстояния, на которое размотаны шнуры. Датчик угла представляет собой, например, датчик, в котором инклинометр или лазер используется для определения наклона шнура относительно указанных по меньшей мере двух опорных углов.
Альтернативно, датчик угла расположен на выходе бобины 72.
В качестве варианта, устройство предусмотрено с множеством бобин, шнуры которых прикреплены в отдельных местах, так что только на основе информации о расстояниях, на которые размотаны шнуры, предоставленной датчиками на бобинах, вычислительное устройство вычисляет углы и расстояние для относительного положения муфты относительно целевой трубы.
В соответствии с вариантом, который не проиллюстрирован, бобина снабжена датчиком разрыва шнура. В этом случае соответствующее предупреждение передается оператору посредством командного интерфейса, например, посредством индикаторной лампы, указывающей на разрыв шнура.
За исключением различий, описанных выше, структурно и функционально данный вариант осуществления является таким же, как вариант осуществления по фиг.1-3, и, следовательно, он не будет описан здесь более подробно.
В целом, в варианте, который не проиллюстрирован и который применим для всех вариантов осуществления, описанных выше, одно и то же вычислительное устройство обеспечивает управление несколькими рукавами. Переключатель, предусмотренный на командном интерфейсе, обеспечивает возможность управления множеством загрузочных рукавов, соединенных с одним и тем же вычислительным устройством, посредством использования одного и того же принципа и с помощью одного и того же командного интерфейса. Разрешенные зоны, предусмотренные в вычислительном устройстве для каждого из рукавов, соответствуют перемещениям соседних рукавов и или параметризованы, или переопределяются в реальном времени в зависимости от перемещений соседних рукавов.
В другом общем варианте, который не проиллюстрирован, командный интерфейс представляет собой устройство дистанционного управления, предусмотренное с передатчиком, предназначенным для беспроводной связи с приемником, соединенным с вычислительным устройством в шкафу электрического управления. Связь между передатчиком и приемником осуществляется посредством радиоволн. В качестве варианта, связь между передатчиком и приемником осуществляется посредством световых волн, например инфракрасных волн.
В соответствии с другим вариантом осуществления изобретения, который не показан, загрузочный рукав снабжен устройством для предоставления информации о положении муфты согласно изобретению, в котором средство для предоставления информации о положении муфты представляет собой камеру, установленную на основании.
Мишень расположена на муфте. Камера предназначена для фокусировки на мишени и передачи вычислительному устройству изображения мишени. Вычислительное устройство выполнено с возможностью вычисления относительного положения муфты относительно основания, исходя из данного изображения.
Для этого в вычислительном устройстве предусмотрен алгоритм обработки изображения и распознавания формы для определения расстояния и угла, чтобы, исходя из них, определить относительное положение муфты относительно основания. Для вычисления расстояния алгоритм использует принцип, в соответствии с которым, чем больше расстояние между муфтой и основанием, тем меньше изображение мишени, и для вычисления угла - принцип, в соответствии с которым для круглой мишени изображение мишени является круглым, когда муфта располагается вдоль оси целевой трубы, и изображение мишени является эллиптическим, когда муфта смещена в аксиальном направлении относительно целевой трубы.
В другом варианте несколько камер расположены с возможностью фокусировки на одной и той же мишени и выдачи нескольких изображений вычислительному устройству, при этом вычислительное устройство выполнено с возможностью обработки всех этих изображений для вычисления относительного положения муфты относительно основания.
В еще одном варианте осуществления камера установлена на моторизованной опоре, управление которой осуществляется с помощью вычислительных средств для поворота ее так, чтобы она была постоянно ориентирована по направлению к мишени и обеспечивала возможность того, что угловая ориентация камеры относительно основания будет известна в любой момент времени, при этом вычислительные средства выполнены с возможностью обработки данной информации об угловой ориентации и обработки изображения, передаваемого камерой, для определения относительного положения муфты относительно основания.
Предпочтительно, по соображениям, связанным с эксплуатационными характеристиками, мишень представляет собой отражающий визир.
Когда загрузочная система содержит несколько трубопроводов, их основания расположены параллельно на одном и том же причале, и соответствующие муфты соединены с целевыми трубами, расположенными параллельно на одном и том же судне. В этом случае расстояния между муфтами больше не варьируются, поскольку муфты соединены с целевыми трубами, прикрепленными к одному и тому же судну. В этом случае полезно проверить возможные изменения расстояния между муфтами по отношению друг к другу для контроля непротиворечивости информации, предоставляемой разными средствами для предоставления информации о положении муфт, и для надлежащего управления данными средствами. Для этого в соответствии с настоящим изобретением предложено устройство, которое названо коррелятором.
Когда загрузочная система содержит несколько трубопроводов, их основания расположены на одном и том же причале, и соответствующие муфты соединены с целевыми трубами, расположенными на одном и том же судне, вычислительное устройство вычисляет расстояния между муфтами непосредственно после соединения и сохраняет результаты. После этого вычислительное устройство продолжает рассчитывать в реальном времени расстояния между муфтами и сравнивает их в реальном времени с сохраненными значениями.
Когда вычисленные значения будут отклоняться от сохраненных значений на величину, превышающую заданную пороговую величину, параметризованную в вычислительном устройстве, вычислительное устройство выдает аварийный сигнал, чтобы показать оператору, что средства для предоставления информации о положении муфты являются дефектными. Это может быть, например, индикаторная лампа.
Когда загрузочная система содержит три или более трубопроводов, вычислительное устройство выдает аварийный сигнал, указывающий на то, какая муфта, очевидно, имеет дефект в средстве для предоставления информации о положении муфты. Это может быть, например, индикаторная лампа с маркером для обозначения соответствующего рукава.
Подобный коррелятор обеспечивает возможность быстрой идентификации средства для предоставления информации о положении дефектной муфты.
В соответствии с обстоятельствами возможны многочисленные другие варианты, и в этой связи следует отметить, что изобретение не ограничено представленными и описанными примерами.

Изобретение относится к системам для загрузки и/или выгрузки текучих сред для судов. Устройство (1) для предоставления информации о положении по меньшей мере одной подвижной муфты (26) морской загрузочной системы (2), при этом система содержит по меньшей мере один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию (21), и подвижный конец трубопровода, снабженный муфтой (26), выполненной с возможностью присоединения к целевой трубе, при этом устройство содержит по меньшей мере одно средство (33) для предоставления информации о положении муфты, приспособленное для размещения на муфте или элементе, расположенном непосредственно рядом с муфтой, и включающее в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации, и определения местоположения (GPS), обеспечивающее возможность выдачи информации об абсолютном положении муфты в пространстве, при этом указанное средство либо выполнено с возможностью взаимодействия непосредственно со средством (34), предназначенным для предоставления информации о положении основания и расположенным на основании или на элементе, расположенном непосредственно рядом с основанием, для предоставления информации об относительном положении муфты непосредственно относительно основания на основе информации о положении основания, либо выполнено с возможностью предоставления информации об абсолютном положении муфты (26) в пространстве, и при основании, имеющем фиксированное положение в пространстве, устройство содержит вычислительное средство, обеспечивающее возможность вычисления информации об относительном положении муфты непосредственно относительно основания на основе информации об абсолютном положении муфты и данных о положении основания, зафиксированного в пространстве. Техническим результатом изобретения является обеспечение устройства для выдачи информации о положении муфты относительно основания более простым способом и способность легкого приспосабливания к любому типу рукава или морской загрузочной системы как жесткого, так и гибкого типа, уже существующему или, тем более, находящемуся на стадии его проектирования. 4 н. и 8 з.п. ф-лы, 4 ил.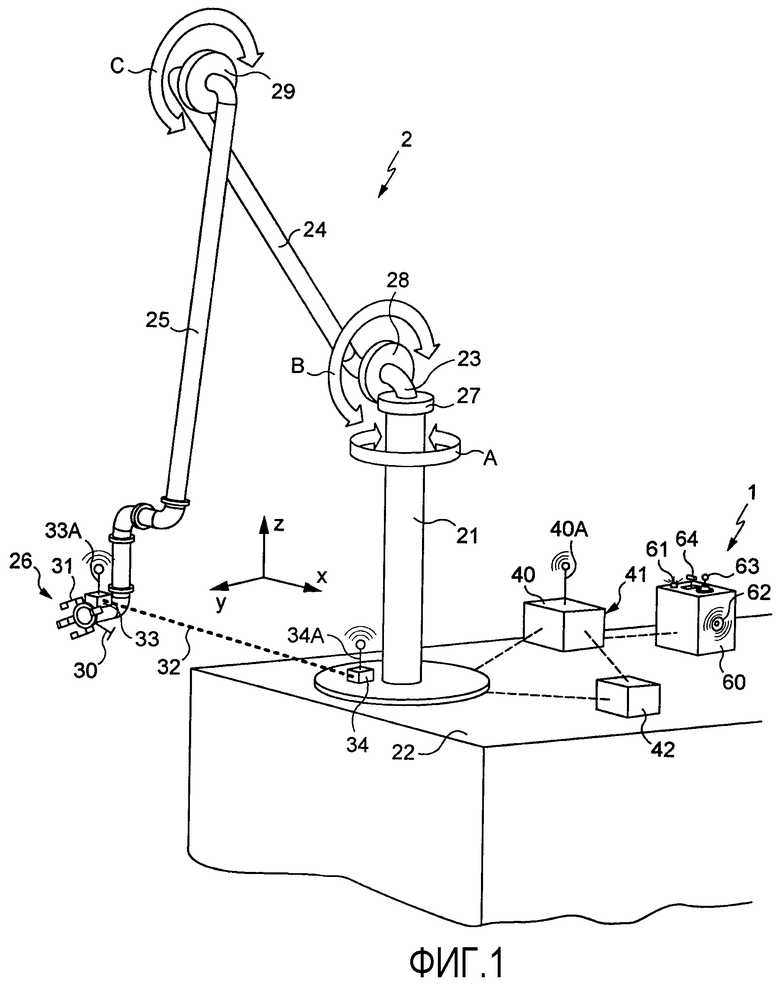
1. Устройство (1) для предоставления информации о положении по меньшей мере одной подвижной муфты (26) морской загрузочной системы (2), при этом система содержит по меньшей мере один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию (21), и подвижный конец трубопровода, снабженный муфтой (26), выполненной с возможностью присоединения к целевой трубе, при этом устройство содержит по меньшей мере одно средство (33) для предоставления информации о положении муфты, приспособленное для размещения на муфте или элементе, расположенном непосредственно рядом с муфтой, и включающее в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи информации об абсолютном положении муфты в пространстве, при этом указанное средство либо выполнено с возможностью взаимодействия непосредственно со средством (34), предназначенным для предоставления информации о положении основания и расположенным на основании или на элементе, расположенном непосредственно рядом с основанием, для предоставления информации об относительном положении муфты непосредственно относительно основания на основе информации о положении основания, либо выполнено с возможностью предоставления информации об абсолютном положении муфты (26) в пространстве, и при основании, имеющем фиксированное положение в пространстве, устройство содержит вычислительное средство, обеспечивающее возможность вычисления информации об относительном положении муфты непосредственно относительно основания на основе информации об абсолютном положении муфты и данных о положении основания, зафиксированного в пространстве.
2. Устройство по п.1, отличающееся тем, что содержит вычислительные средства (41), выполненные с возможностью вычисления в реальном времени информации о положении муфты относительно основания, при этом вычислительное средство имеет данные, определяющие по меньшей мере одну разрешенную зону позиционирования для муфты; проверки в реальном времени того, находится ли муфта в пределах разрешенной зоны; выдачи определенного аварийного сигнала, когда муфта выйдет из соответствующей разрешенной зоны.
3. Устройство по п.2, отличающееся тем, что вычислительное средство (41) выполнено с возможностью вычисления в реальном времени скорости перемещения муфты и включения аварийного сигнала с упреждением, когда муфта (26) приближается к границе соответствующей разрешенной зоны со скоростью, превышающей заданную скорость.
4. Устройство по п.3, отличающееся тем, что средство (34) для предоставления информации о положении основания включает в себя устройство системы для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), обеспечивающее возможность выдачи информации об абсолютном положении основания, при этом вычислительные средства выполнены с возможностью вычисления относительного положения муфты относительно основания на основе информации об абсолютном положении муфты и основания.
5. Устройство по п.4, отличающееся тем, что указанные устройства (33, 34) для глобального определения местоположения, в частности типа глобальной системы навигации и определения местоположения (GPS), представляют собой устройства, предназначенные для коммуникации друг с другом для непосредственного предоставления информации об относительном положении муфты относительно основания вычислительным средствам.
6. Устройство по любому из пп.1-5, отличающееся тем, что одно из средств для предоставления информации о положении муфты или основания включает в себя оптическое устройство, выполненное с возможностью взаимодействия соответственно с основанием или муфтой, или с мишенью, которая зафиксирована соответственно относительно основания или относительно муфты, посредством излучения светового луча (32), такого как лазерный луч, по направлению к основанию или к муфте, или к мишени, которая зафиксирована соответственно относительно основания или муфты, и обнаружения отраженного луча и измерения времени прохождения луча для получения, исходя из этого, информации об относительном положении муфты непосредственно относительно основания.
7. Устройство по любому из пп.1-5, отличающееся тем, что одно из средств для предоставления информации о положении муфты или основания представляет собой оптическую камеру, выполненную с возможностью выдачи вычислительным средствам изображения соответственно основания или муфты, или мишени, которая зафиксирована соответственно относительно основания или муфты, при этом вычислительные средства выполнены с возможностью обработки изображения, выданного камерой, для вычисления относительного положения муфты относительно основания.
8. Устройство по любому из пп.1-5, отличающееся тем, что указанное по меньшей мере одно средство для предоставления информации о положении муфты или основания включает в себя по меньшей мере один шнур (75), натянутый посредством использования бобины (72) между муфтой и основанием, и по меньшей мере один датчик (74) угла и/или по меньшей мере один датчик (74) длины размотанного шнура на бобине, выбранные для предоставления вычислительным средствам информации, обеспечивающей возможность вычисления относительного положения муфты относительно основания.
9. Устройство по п.1, отличающееся тем, что оно содержит вычислительные средства (41), которые в том случае, когда загрузочная система содержит несколько трубопроводов, и при этом их основания расположены на одном и том же причале, и соответствующие муфты присоединены к целевым трубам, расположенным на одном и том же судне, выполнены с возможностью вычисления расстояний между муфтами непосредственно после присоединения комплекта муфт к соответствующим целевым трубам на основе информации о положении муфт, сохранения указанных расстояний в качестве контрольных расстояний, вычисления в реальном времени расстояний между муфтами на основе информации о положении муфт, сравнения в реальном времени вычисленных расстояний с контрольными расстояниями, и выдачи аварийного сигнала, когда вычисленные расстояния изменяются по отношению к контрольным расстояниям с выходом за заданное пороговое значение.
10. Способ управления устройством по любому из пп.1-9 с использованием вычислительных средств, включающий в себя операции, состоящие из вычисления в реальном времени информации о положении муфты относительно основания, и при этом вычислительные средства имеют данные, определяющие границы по меньшей мере одной разрешенной зоны позиционирования для муфты; проверки в реальном времени того, находится ли муфта в пределах разрешенной зоны; выдачи определенного аварийного сигнала, когда муфта выходит из соответствующей разрешенной зоны.
11. Вычислительное устройство (41) для устройства по любому из пп.1-9, выполненное с возможностью вычисления в реальном времени информации о положении муфты относительно основания, при этом вычислительные средства имеют данные, определяющие границы по меньшей мере одной разрешенной зоны позиционирования для муфты; проверки в реальном времени того, находится ли муфта в пределах разрешенной зоны; выдачи определенного аварийного сигнала, когда муфта выходит из соответствующей разрешенной зоны.
12. Морская загрузочная система (2), содержащая по меньшей мере один трубопровод для перекачки текучих сред, имеющий конец трубопровода, прикрепленный к основанию (21), и подвижный конец трубопровода, снабженный муфтой (26), выполненной с возможностью присоединения к целевой трубе, и устройство (1) по любому из пп.1-9.
| СПОСОБ ИЗГОТОВЛЕНИЯ СТЕКЛА С ГРАДИЕНТОМ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ | 1991 |
|
RU2008287C1 |
| US 4758970 A, 19.07.1988 | |||
| US 4402350 A, 06.09.1983 | |||
| US 4408943 A, 11.10.1983. | |||

