Область техники, к которой относится изобретение
Настоящее изобретение относится к способу синхронизации узлов сети. В частности, но неисключительно, настоящее изобретение относится к способу синхронизации взаимно разнесенных узлов сети с опорной временной шкалой на базе Глобальной Спутниковой Навигационной Системы (GNSS). Настоящее изобретение, кроме того, относится к устройству синхронизации и к системе синхронизации для синхронизации взаимно разнесенных узлов сети с опорной временной шкалой на базе Глобальной Спутниковой Навигационной Системы (GNSS).
Уровень техники
Синхронизация узлов сети относительно системной опорной точки отсчета времени является важным требованием во многих сетевых приложениях. Основной задачей при проектировании сложных сетевых систем для особо важных прикладных областей является возможность сохранять каждый узел сети синхронизированным относительно заданной системной временной шкалы. Задача становится еще более важной, когда линии связи между узлами не могут напрямую использоваться для достижения синхронизации в масштабе всей системы.
Высокоэффективная синхронизация до наносекунд и пикосекунд является фундаментальным требованием во многих областях применения. Например, такая синхронизация может потребоваться в таких сферах, как приложения, служащие для позиционирования, определения местонахождения и дальности, сложные системы контроля и управления, охватывающие пространственные векторы между узлами на большом расстоянии, финансовые операции, распределенные производственные линии, системы контроля за состоянием окружающей среды для приложений Безопасности Жизнедеятельности (БЖД) и гражданской обороны и, в целом, для любой распределенной системы с переключением по времени, находящейся в условиях большой нагрузки.
Синхронизация сети должна учитывать системные требования на основании производительности и необходимой функциональности, например такие, как:
Степень Важности Сети: т.е. низкая (например, с нормальной устойчивостью и не жизненно важная), средняя (например, с высокой устойчивостью, но не жизненно важная) или высокая (например, Сети БЖД);
Степень Покрытия Сети (рассматривается большая ось зоны охвата сети): Малая (<300 км), Средняя (<5000 км) или Высокая (>5000 км);
Степень Безопасности Сети: Открытая (например, научные приложения), средняя (например, только безопасность исключительно на уровне связи) или безопасная (например, с различными степенями безопасности, к примеру, для данных, связи, …);
Степень Сложности Сети: Простая/Средняя (нет медленных и ненадежных линий связи) или Сложная (например, неоднородные сети).
Разнообразие и количество различных требований привели к проблемам, которые предоставляют однозначно определяемую систему синхронизации, способную отвечать любым потребностям. Такая синхронизация взамен должна обеспечиваться специализированными (типа ad-hoc) системами, нацеленными на искомое решение.
Были представлены различные разработки в области синхронизации. Многие системы синхронизации по времени основываются на навигационных сигналах от спутниковых систем GNSS, таких как GLONASS, GPS и перспективная спутниковая система Galileo. Следует учитывать, что термин GNSS также может относиться ко всем подобным системам спутниковой навигации, включающим в себя наземные передающие устройства, выполненные с возможностью распространять навигационные сигналы. Навигационные сигналы идеальны для приложений синхронизации, так как они формируются очень стабильными источниками, а местонахождение передающих устройств известно точно. Кроме того, сигналы, передаваемые спутниками GNSS, обладают глобальной зоной действия и относятся к универсальной глобальной системе отсчета времени. Навигационные сигналы, как правило, используются в форме псевдодальностей, которые являются результатом корреляционного процесса, внутри приемных устройств, между передаваемым спутниками GNSS псевдослучайным шумовым (PRN) кодом конечной длины, модулирующим несущую, и репликой, генерируемой внутри принимаемого сигнала. Спектральные свойства PRN-кода (т.е. расширенный спектр) сделали его идеальным сигналом для приложений определения дальности. Точность измерений псевдодальностей, однако, ограничивается по точности шириной полосы и отношением сигнал-шум до величины порядка метров. Даже для дифференциальной системы, в которой могут быть устранены задержки распространения, этого явно недостаточно для приложений с высокоточным переносом времени.
Международная заявка WO 01/61426 описывает способ и устройство с множеством приемных устройств GNSS, размещенных во взаимно удаленных местоположениях. Каждое приемное устройство GNSS соединено с центральной процессорной системой, которая рассчитывает сдвиги между различными временными сигналами на приемном устройстве GPS. Недостаток описываемой системы состоит в том, что каждое приемное устройство GPS должно быть соединено с центральной процессорной системой и что вычислительная нагрузка и нагрузка обработки данных центральной процессорной системы значительно увеличиваются по мере увеличения количества приемных устройств в сети. Кроме того, расчет временной синхронизации производится по времени, оцениваемому каждым приемным устройством, таким образом, включающему в себя любую погрешность, воздействующую на навигационное решение для определения положения (например, погрешности в положении переносятся на погрешности в определении времени).
Раскрытие Изобретения
Настоящее изобретение направлено на решение вышеупомянутых проблем.
В общих чертах задача настоящего изобретения заключается в том, чтобы предоставить способ и систему для синхронизации узлов сети с использованием GNSS-сигналов посредством предоставления распределенной сети с изменяемой конфигурацией, в которой нагрузка вычислений и обработки данных может распределяться от центрального обрабатывающего устройства на одно или более ведущих обрабатывающих устройств. Целью настоящего изобретения дополнительно является предоставление гибкой и масштабируемой производительности сети, а также зоны действия сети, чтобы отвечать различным потребностям и топологиям сети.
Согласно первому аспекту настоящего изобретения, предусмотрен способ синхронизации множества разнесенных узлов сети с системой отсчета времени центра управления. Способ содержит этапы, на которых принимают данные измерений от каждого из множества узлов; ранжируют множество узлов в зависимости от данных измерений; выбирают один или более ведущих узлов из множества узлов согласно результату ранжирования; назначают каждый из множества узлов на соответствующий ведущий узел или на центр управления; и определяют первый временной сдвиг между локальным временем, измеренным на каждом узле, и локальным временем, измеренным на соответствующем ему ведущем узле, и определяют второй временной сдвиг между каждым из ведущих узлов и опорной точкой отсчета времени таким образом, что может быть определен временной сдвиг между локальным временем, измеренным на каждом узле, и опорной точкой отсчета времени.
Соответственно, нагрузка вычислений и обработки данных, требуемая для точной синхронизации, может быть распределена от управляющего обслуживающего узла на некоторое количество ведущих узлов, что приводит к существенному снижению нагрузки вычислений и обработки данных в центре управления. Сверх того, может быть достигнута более точная синхронизация, так как расстояние между ведущим узлом и распределенным ему узлом сети будет короче, чем расстояние между таким узлом и центром управления, учитывая, что эффективность синхронизации уменьшается с расстоянием.
Данные измерений могут содержать: данные о положении, отображающие географическое положение каждого узла; данные об окружающей среде, отображающие локальные условия окружающей среды (такие, например, как локальные погодные и электромагнитные условия) около каждого узла; и/или данные о рабочих характеристиках, отображающие рабочие характеристики каждого узла (такие, например, как рабочие характеристики локального тактового генератора на каждом узле).
Данные о положении могут содержать данные, которые соответствуют измерениям, произведенным приемным устройством GNSS на соответствующем узле. Например, приемное устройство GNSS может вычислять псевдодальность, измеряя время приема GNSS-сигнала относительно времени передачи того же сигнала.
Соответственно, каждый узел может ранжироваться согласно географическому положению этого узла относительно соседних сетевых узлов. Например, сетевому узлу, расположенному ближе к центру относительно других сетевых узлов, может быть задан более высокий результат ранжирования, чем узлу, который расположен дальше от центра. Могут приниматься во внимание и другие показатели, влияющие на выбор ведущих узлов, такие как разброс узлов или подвижность узлов, влияющие на топологию сети.
Дополнительно, узлы могут ранжироваться в зависимости от рабочих характеристик каждого узла, например от рабочих характеристик тактового генератора на каждом узле. Таким образом, узлы, обладающие более стабильной опорной точкой отсчета времени по сравнению с соседними узлами, могут выбираться из числа этих узлов в качестве ведущего узла.
Другие показатели, которые могут учитываться при ранжировании узлов, могут иметь отношение: к локальным параметрам окружающей среды в окрестности узла, влияющим на рабочие характеристики спутникового сигнала и, следовательно, на данные измерений узла; к характеристикам сетевых соединений узла, влияющим на доступность данных измерений, собранных узлом, на ведущем узле.
Географическое распределение узлов может определяться согласно данным о положении, и каждый из множества узлов может назначаться соответствующему ведущему узлу в зависимости от положения узла относительно положения ведущего узла. Центр управления может играть роль ведущего узла, и один или более узлов могут быть назначены центру управления.
Настоящее изобретение, тем самым, обеспечивает гибкость, так как синхронизация не будет зависеть от топологии сети благодаря центру управления, характеризующему саму сеть. Таким образом, способ может быть приспособлен к любой сети и легко применяться к существующим сетям.
Данные наблюдений, такие как данные, отображающие псевдодальность и/или измерения фаз несущей, могут приниматься от множества узлов.
Первый временной сдвиг между узлом и соответствующим ему ведущим узлом или второй временной сдвиг между центром управления и каждым ведущим узлом может определяться посредством применения алгоритма, выбранного из группы алгоритмов переноса времени в зоне общей видимости, переноса времени в связанной зоне общей видимости и переноса времени в многовариантной связанной зоне общей видимости. Алгоритм синхронизации может автоматически выбираться центром управления или ведущим узлом в зависимости от положения узла относительно соответствующего ему ведущего узла. Таким образом, обеспечивается масштабируемость, так как способ может быть приспособлен к относительной удаленности узла посредством выбора соответствующего алгоритма синхронизации.
Первый временной сдвиг между узлом и соответствующим ему ведущим узлом или второй временной сдвиг между ведущим узлом и центром управления может определяться посредством применения алгоритма с использованием фазы несущей. Таким образом, синхронизация может достигать высокой точности порядка пикосекунды.
Рабочие характеристики тактового генератора каждого узла могут контролироваться, чтобы повторно ранжировать узлы согласно рабочим характеристикам тактового генератора и выбирать узел в качестве ведущего узла согласно результату ранжирования. Непрерывный контроль рабочих характеристик узла, таким образом, обеспечивает сохранение работоспособности и восстановление после неисправностей, а также отказоустойчивость. Ведущий опорный узел может автоматически заменяться другим узлом в случае неисправности без полного процесса синхронизации других затронутых узлов сети.
Обновленная информация о положении может приниматься от узлов сети, и ведущий узел может выбираться из множества узлов согласно обновленной информации о положении. Если, например, подвижный узел перемещается из одной области в другую область, способ может, когда это целесообразно, перераспределять этот узел более подходящему с точки зрения положения ведущему узлу, т.е. перемещать его из одной подсети в другую подсеть. Дополнительно, если ведущий узел перемещается далеко от распределенных ему узлов, для этих узлов может быть найден более подходящий ведущий узел.
Согласно второму аспекту настоящего изобретения, предусмотрено устройство синхронизации для синхронизации множества узлов сети с опорной временной шкалой, причем устройство содержит: приемное устройство GNSS, функционально связанное с GNSS-антенной; источник времени, задающий локальное время; средство передачи данных для приема данных от одного или более узлов и/или передачи на них данных; средство ранжирования, выполненное с возможностью ранжировать узлы относительно друг друга согласно данным измерений, передаваемым узлами; средство выбора, выполненное с возможностью выбирать один или более ведущих узлов из множества узлов согласно результату ранжирования узлов; средство назначения, выполненное с возможностью назначать каждый узел из множества узлов на соответствующий ведущий узел или на центр управления согласно данным измерений, принятым от каждого узла; и средство определения временного сдвига, выполненное с возможностью определять первый временной сдвиг между локальным временем, измеренным на каждом узле, и локальным временем, измеренным на соответствующем ему ведущем узле, и выполненное с возможностью определять второй временной сдвиг между каждым из ведущих узлов и опорной временной шкалой таким образом, что может быть определен временной сдвиг между локальным временем, измеренным на каждом узле, и опорной временной шкалой.
Согласно третьему аспекту настоящего изобретения, предусмотрена система синхронизации для синхронизации множества узлов сети с опорной временной шкалой, причем система содержит описанное выше устройство синхронизации и множество сетевых узлов, при этом каждый из сетевых узлов снабжается приемным устройством GNSS и локальным источником временных интервалов.
Краткое описание чертежей
Далее будут описаны исключительно в качестве примеров варианты осуществления настоящего изобретения со ссылкой на следующие чертежи, на которых:
Фиг.1A является структурной схемой системы синхронизации согласно первому варианту осуществления настоящего изобретения;
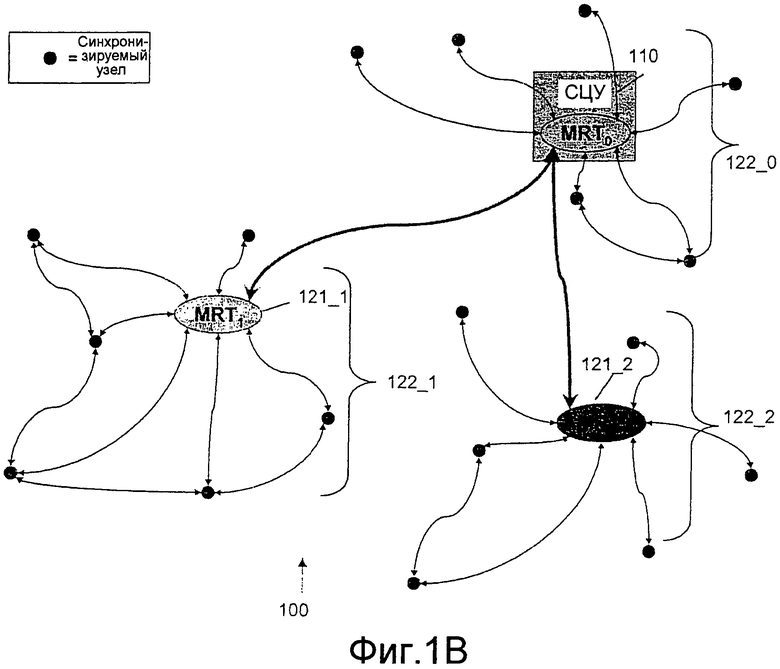
Фиг.1B представляет собой схему, иллюстрирующую расположение сетевых узлов, изображенных на Фиг.1;
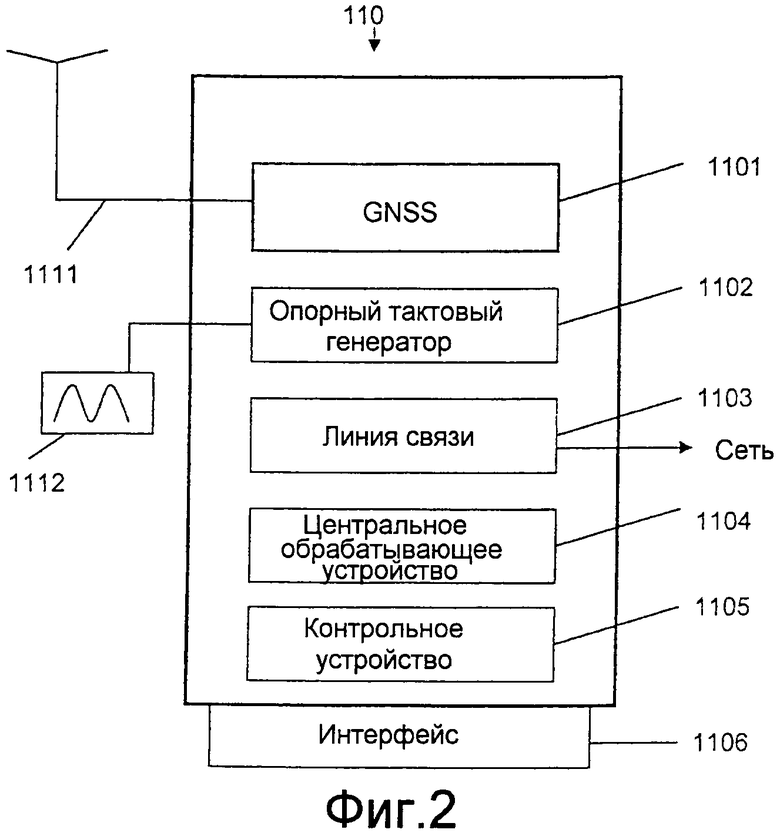
Фиг.2 является структурной схемой устройства центра управления согласно первому варианту осуществления настоящего изобретения;
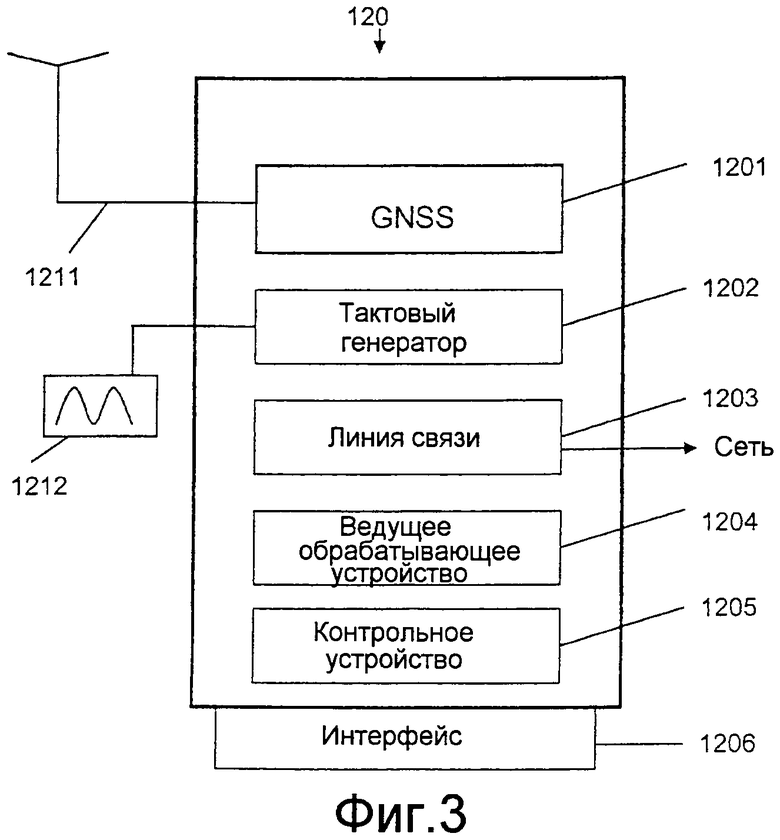
Фиг.3 является структурной схемой устройства ведущего узла согласно первому варианту осуществления настоящего изобретения;
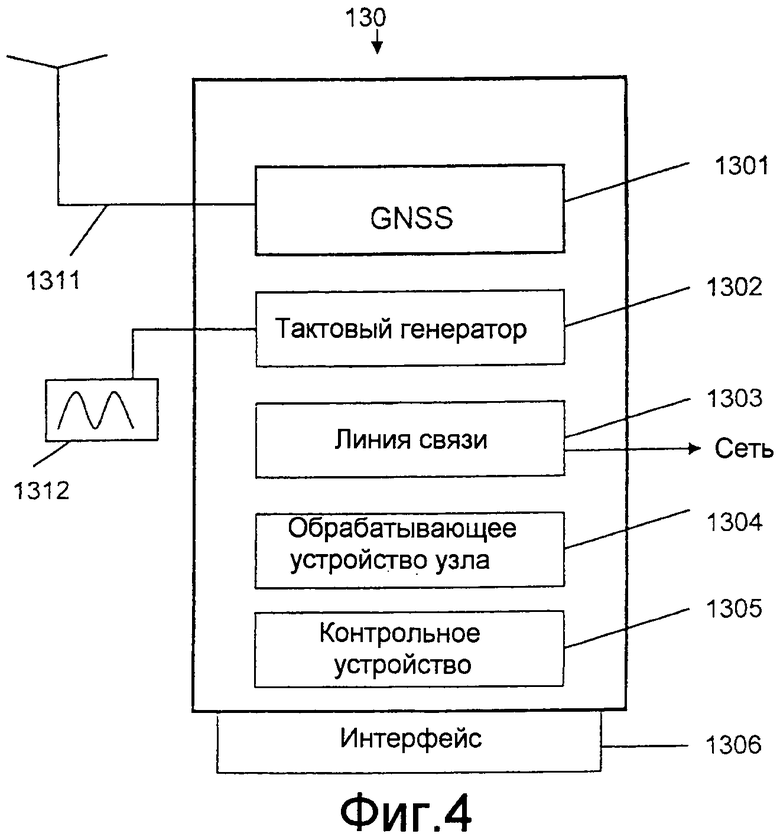
Фиг.4 является структурной схемой устройства сетевого узла согласно первому варианту осуществления настоящего изобретения;
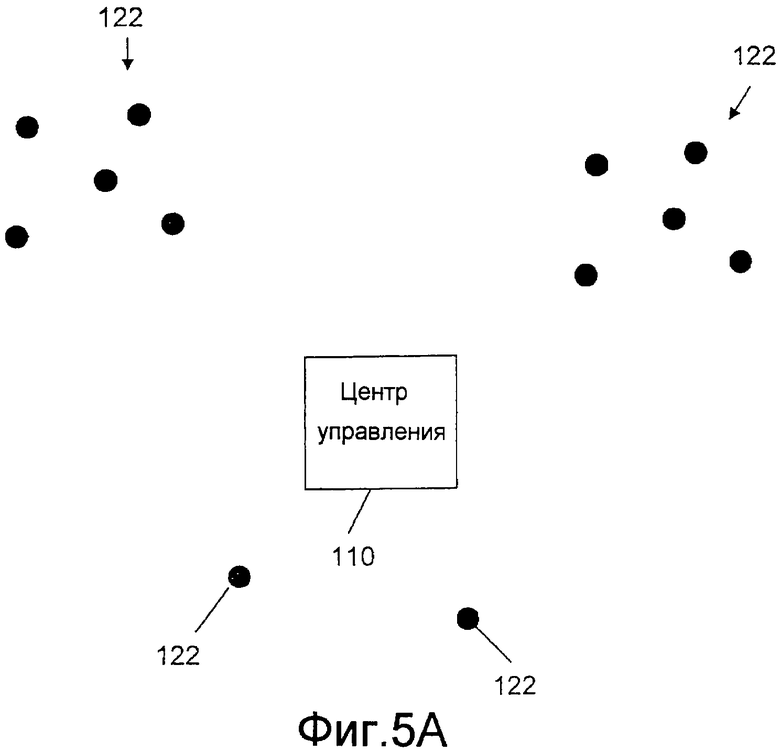
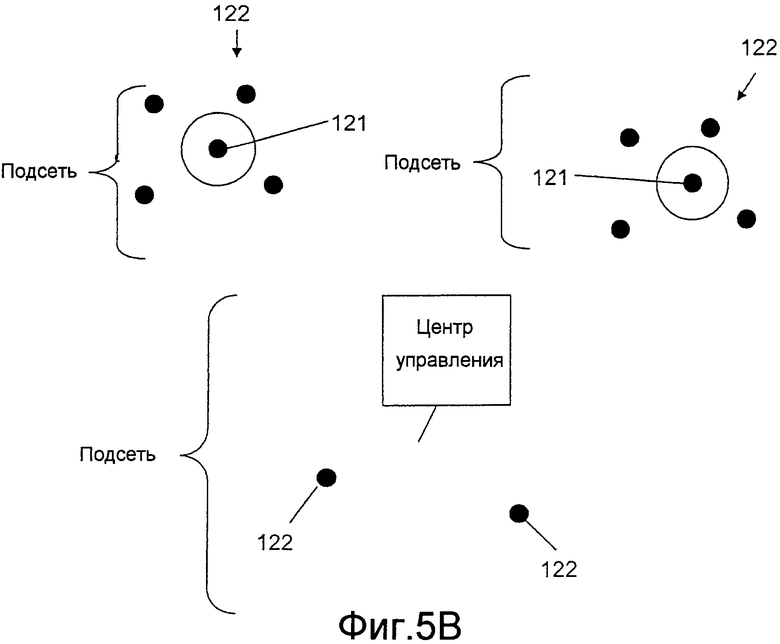
Фиг.5A и 5B являются схематическими представлениями способа синхронизации согласно первому варианту осуществления настоящего изобретения;
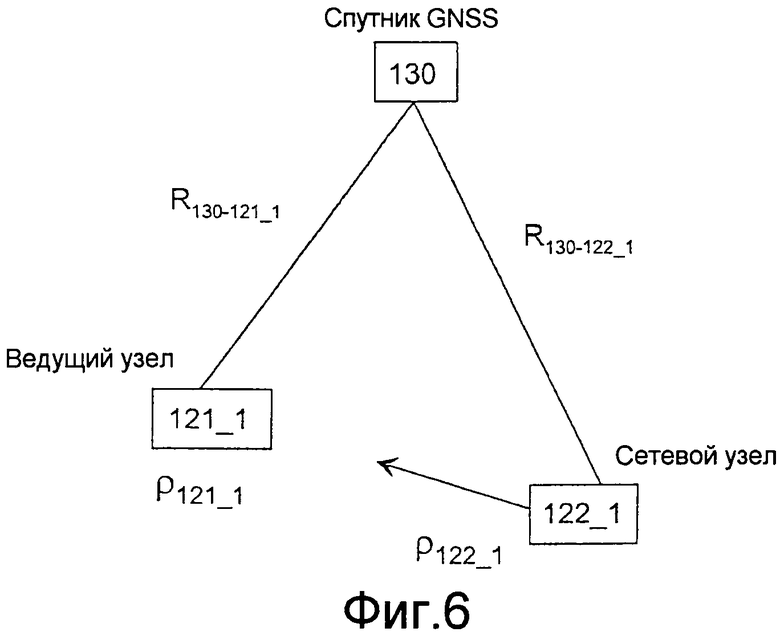
Фиг.6 иллюстрирует использование алгоритма ПВОВ в первом варианте осуществления настоящего изобретения; и
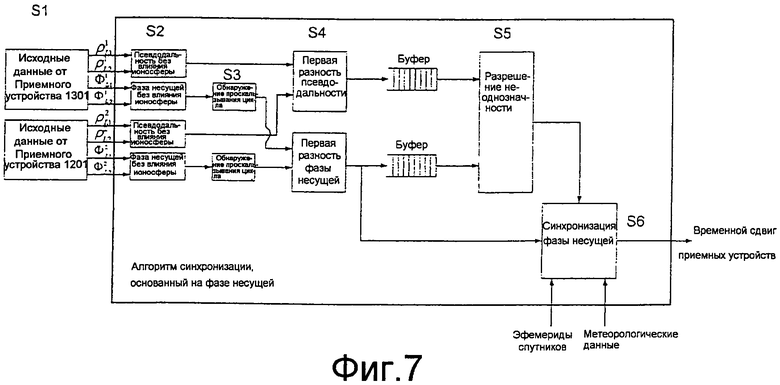
Фиг.7 является схематическим представлением способа синхронизации согласно дополнительному варианту осуществления настоящего изобретения.
Осуществление изобретения
Далее будет описан первый вариант осуществления настоящего изобретения со ссылкой на Фиг.1-4. Фиг.1A и 1B иллюстрируют систему 100 для синхронизации узлов сети с опорной временной шкалой согласно первому варианту осуществления настоящего изобретения. Система содержит центр 110 управления с опорной временной шкалой, n пространственно разделенных ведущих узлов 121-1-121-n, и m сетевых узлов в группах 122_0, 122_1, 122_2, …, 122_n, спутниковую систему 130 GNSS, такую как спутниковая система GPS, GLONASS, GALILEO или COMPASS, содержащую множество спутников для предоставления сигналов позиционирования центру 110 управления и узлам 121, 122 сети.
Далее будет более подробно описан центр 110 управления со ссылкой на Фиг.2. Центр 110 управления включает в себя многочастотное (по меньшей мере, двухчастотное) приемное устройство 1101 GNSS, функционально связанное с GNSS-антенной 1111 для приема навигационных сигналов от какого-либо из спутников спутниковой системы 130 GNSS в зоне видимости GNSS-антенны 1111, причем приемное устройство 1101 GNSS выполняется с возможностью производить измерения кода грубого определения местоположения (C/A) и фаз несущей; центральный опорный тактовый генератор 1102, задающий опорную точку отсчета времени и частоты; линию 1103 связи для передачи и/или приема данных на и от узлов сети, включающих в себя ведущие узлы 121_1-121_n и сетевые узлы 122_0-122_n; центральное обрабатывающее устройство 1104; и интерфейс 1106 приложения для сопряжения с уровнем приложений, требующим синхронизации. Такое приложение может включать в себя приложение, служащее для позиционирования, определения местонахождения и дальности. В качестве альтернативы, приложение может включать в себя любую систему с переключением по времени, например, сложные системы контроля и управления, которые могут охватывать пространственные векторы между узлами на большом расстоянии, финансовые операции, распределенные производственные линии и системы контроля за состоянием окружающей среды для приложений БЖД и гражданской обороны.
Опорный тактовый генератор 1102 включает в себя высокостабильный атомный осциллятор 1112, с которым он объединен в одном блоке. Необходима как долгосрочная, так и средне/краткосрочная высокая стабильность. Такая стабильность достигается посредством использования группы тактовых генераторов, составленной из тактового генератора на основе Активного Водородного Мазера для краткосрочной стабильности и цезиевых или рубидиевых тактовых генераторов для долгосрочной стабильности.
Центр 110 управления дополнительно включает в себя устройство 1105 контроля за состоянием окружающей среды, содержащее метеорологическую станцию для контролирования погодных условий, радиометр водяного пара для контролирования локальных условий окружающей среды, оказывающих воздействие на атмосферу, и электромагнитную систему контроля за состоянием окружающей среды для контролирования локального ЭМ-загрязнения, оказывающего воздействие на рабочие характеристики сигнала и, следовательно, на измерение сигнала от спутника 130 GNSS, выполняемое приемным устройством 1101 GNSS.
Центральное обрабатывающее устройство 1104 способно контролировать состояние узлов сети, включая такие параметры, как рабочие характеристики тактового генератора узла, чтобы конфигурировать сеть посредством выбора ведущих узлов 121_1-121_n из числа узлов сети, и чтобы распределять каждый узел 122_0-122_n соответствующему ведущему узлу 121_1-121_n или центру 110 управления согласно данным, принимаемым от каждого узла. Данные, принимаемые центром 110 управления от каждого узла, включают в себя данные, отображающие рабочие характеристики тактового генератора на каждом узле, условия окружающей среды каждого узла и данные о положении каждого узла. Центральное обрабатывающее устройство 110 также выполняется с возможностью хранить и/или реализовывать алгоритмы синхронизации, включающие в себя перенос времени в зоне общей видимости (ПВОВ), перенос времени в связанной зоне общей видимости (ПВСОВ) и перенос времени в многовариантной связанной зоне общей видимости (ПВМВСОВ), алгоритмы с использованием псевдодальностей и фаз несущей в зависимости от диапазона сети и требуемой степени синхронизации. Алгоритмы могут быть реализованы в центре управления и/или на MRT (узел ведущей опорной точки отсчета времени).
Как упоминалось выше, задачи центра 110 управления включают в себя конфигурирование сети на основе выбора некоторого количества ведущих узлов 121_1-121_n из всех сетевых узлов; распределение каждого сетевого узла 122_0-122_n ведущему узлу 121_1-121_n или центру 110 управления в зависимости от данных о положении; синхронизацию ведущих узлов и узлов, распределенных центру 110 управления, с опорной временной шкалой центра 110 управления. В некоторых случаях задачи центра управления могут включать в себя выбор алгоритма синхронизации для каждого ведущего узла в зависимости от конфигурации ведущего узла 121_x и соответствующих распределенных ему узлов 122_x.
Далее будет более подробно описан ведущий узел 121 со ссылкой на Фиг.3. Ведущий узел 121_x выполняет функцию узла ведущей опорной точки отсчета времени для распределенных ему сетевых узлов 122_x и включает в себя: многочастотное (по меньшей мере, двухчастотное) приемное устройство 1201 GNSS, функционально связанное с GNSS-антенной 1211 для приема навигационных сигналов от каких-либо спутников спутниковой системы 130 GNSS в зоне видимости GNSS-антенны 1211; причем приемное устройство GNSS выполняется с возможностью производить измерения кода грубого определения местоположения (C/A) и фаз несущей; ведущий опорный тактовый генератор 1202, задающий опорное локальное время; линию 1203 связи для передачи и/или приема данных на и от узлов сети, включающих в себя центр 110 управления и сетевые узлы 122, распределенные этому ведущему узлу 121, и для передачи данных между этими распределенными узлами 122 и центром 110 управления; обрабатывающее устройство 1204; контрольное устройство 1205 для контролирования условий окружающей среды ведущего узла 121_x, включающее в себя метеорологическую станцию для контролирования погодных условий, радиометр водяного пара для контролирования локальных условий, оказывающих воздействие на атмосферу и, следовательно, на связь между приемным устройством 1201 GNSS и GNSS-спутником 130; и интерфейс 1206 приложения для сопряжения с локальным приложением ведущего узла, требующим синхронизации.
Ведущий опорный тактовый генератор 1202 включает в себя высокостабильный атомный осциллятор 1212, такой как рубидиевый тактовый генератор, с которым он объединен в одном блоке. Ведущие опорные узлы могут снабжаться атомными тактовыми генераторами, например рубидиевыми, так как они синхронизируются по синхронной сети относительно опорного тактового генератора 1102 в центре управления и, следовательно, не имеют таких же требований к степени стабильности.
Ведущее обрабатывающее устройство 1204 выполняется с возможностью выбирать и реализовывать оптимальный алгоритм синхронизации для синхронизации соответствующих распределенных сетевых узлов 122_x с ведущим узлом 121_x. В некоторых вариантах осуществления настоящего изобретения центр 110 управления выбирает целесообразный алгоритм синхронизации для синхронизации распределенных сетевых узлов 122_x с ведущим узлом 121_x. Алгоритм синхронизации, выбираемый соответствующим ведущим узлом, может выбираться из алгоритмов переноса времени в зоне общей видимости (ПВОВ) и переноса времени в связанной зоне общей видимости (ПВСОВ) с использованием измерений фаз несущей или псевдодальностей. Ведущее обрабатывающее устройство может также использовать перенос времени в многовариантной связанной зоне общей видимости (ПВМВСОВ) с измерениями фаз несущей или псевдодальностей. Ведущий узел может контролировать состояние сетевых узлов и пересылать данные, отражающие состояние сетевого узла, на центр 110 управления.
Далее будет более подробно описан сетевой узел 122 со ссылкой на Фиг.4. Сетевой узел включает в себя многочастотное (по меньшей мере, двухчастотное) приемное устройство 1301 GNSS, функционально связанное с GNSS-антенной 1311 для приема навигационных сигналов от каких-либо спутников спутниковой системы 130 GNSS в зоне видимости GNSS-антенны 1311; причем приемное устройство GNSS выполняется с возможностью производить измерения кода грубого определения местоположения (C/A) и фаз несущей; локальный опорный тактовый генератор 1302, задающий локальное время узла; линию 1303 связи для передачи и/или приема данных на и от другого узла сети, включающей в себя ведущий узел 121, которому распределен этот узел, в некоторых случаях центр 110 управления, а в некоторых случаях другие сетевые узлы 122; обрабатывающее устройство 1304; устройство 1305 контроля для контролирования условий окружающей среды сетевого узла 122, включающее в себя метеорологическую станцию для контролирования погодных условий, радиометр водяного пара и т.п. для контролирования локальных условий, оказывающих воздействие на атмосферу и, следовательно, на связь между приемным устройством 1301 GNSS и GNSS-спутником 130; и интерфейс 1306 приложения для сопряжения узла с локальным приложением.
Опорный тактовый генератор 1302 узла включает в себя высокостабильный атомный осциллятор 1312, например рубидиевый тактовый генератор, с которым он объединен в одном блоке.
Сетевое обрабатывающее устройство 1304, если сетевой узел приемлем в качестве ведущего узла, выполняется с возможностью выбирать и реализовывать оптимальный алгоритм синхронизации в случае выхода из строя ведущего узла 121 и последующего избрания этого сетевого узла в качестве нового ведущего узла 121 для синхронизации сетевых узлов 122 с его опорной точкой отсчета времени. Алгоритм синхронизации, выбираемый соответствующим сетевым узлом 122-x (при избрании в качестве нового ведущего узла 121-x), может основываться на переносе времени в зоне общей видимости (ПВОВ) или переносе времени в связанной зоне общей видимости (ПВСОВ) с использованием измерений фаз несущей или псевдодальностей. Сетевое обрабатывающее устройство также может запросить перенос времени в многовариантной связанной зоне общей видимости (ПВМВСОВ) с измерениями фаз несущей или псевдодальностей.
В первом варианте осуществления настоящего изобретения приложение, которое нужно синхронизировать, является приложением локальной области, в котором один и тот же спутник спутниковой системы 130 может находиться в зоне видимости, по меньшей мере, двух узлов сети, а расстояние между узлами <20 км. В дополнительных вариантах осуществления настоящего изобретения алгоритмы также могут быть реализованы для региональных приложений (т.е. с пространственным вектором узлов до 5000 км), предоставляющих такие же результаты, но посредством применения алгоритма ПВСОВ вместо алгоритма ПВОВ.
Далее будет описан способ синхронизации узлов сети согласно первому варианту осуществления настоящего изобретения со ссылкой на Фиг.5A и 5B.
Фиг.5A и 5B иллюстрируют некоторое количество сетевых узлов 122, которые нужно синхронизировать с опорной временной шкалой, и центр 110 управления, связанный с этой опорной временной шкалой. Каждый из сетевых узлов 122 передает центру 110 управления данные о положении, отображающие его положение, связанные данные наблюдений, т.е. измерения псевдодальностей и/или фаз несущей, получаемые соответствующим приемным устройством 1301 GNSS, данные от его соответствующих устройств 1305 контроля за состоянием окружающей среды и данные узла о тактовом генераторе, отображающие состояние его локального тактового генератора 1302.
Центр 110 управления обрабатывает данные, принимаемые от каждого из узлов, и ранжирует каждый узел согласно рабочим характеристикам его тактового генератора 1302, учитывая данные о положении и/или любые данные от устройства 1305 контроля за состоянием окружающей среды, свидетельствующие об условиях приема соответствующего приемного устройства 1301 GNSS спутниковой системы 130 GNSS. Например, данные от узла, свидетельствующие о слабом приеме сигнала приемным устройством 1301 GNSS этого узла от спутника 130, привели бы к тому, что этот узел имел бы более низкий результат ранжирования, чем другой узел 122 с аналогичными рабочими характеристиками тактового генератора узла, но с лучшими условиями приема сигнала. Узел, имеющий хорошие рабочие характеристики тактового генератора узла, хорошие условия приема сигналов от спутника, дополнительные средства контроля за состоянием окружающей среды, помимо метеорологической станции, такие, например, как электромагнитное устройство контроля за состоянием окружающей среды и радиометр водяного пара, и центральное местоположение относительно других узлов сети, будет получать более высокий результат ранжирования относительно другого узла с более слабыми рабочими характеристиками тактового генератора и/или худшими условиями спутниковой связи.
Центр 110 управления выбирает некоторое количество сетевых узлов из множества сетевых узлов 122 в качестве ведущих узлов 121 в зависимости от ранжирования рабочих характеристик узла, т.е. выбираются узлы с более высоким результатом ранжирования. Затем остальные сетевые узлы назначаются ведущему узлу 122 или непосредственно центральному узлу в зависимости от положения сетевого узла 122 относительно ведущих узлов 121 и центра управления, т.е. сетевой узел 122-x распределяется ближайшему для него ведущему узлу 121-x, или, если он располагается ближе к центру 110 управления, чем к ведущему узлу 121-x, то сетевой узел 122-x распределяется центру 110 управления. Этот процесс приводит к формированию некоторого количества подсетей в пределах основной сети.
Разделение сети на подсети, таким образом, позволяет центру 110 управления распределить рабочую нагрузку синхронизации и нагрузку обработки данных на ведущие узлы 121.
Дополнительно может быть получена лучшая точность синхронизации, поскольку для узлов 122, распределенных ведущему узлу, расстояние между каждым узлом и ведущим узлом 121, с которым он синхронизируется, меньше расстояния между этим узлом 122 и центром 110 управления, что оставляет меньше возможностей для погрешности в алгоритме синхронизации.
Затем каждый ведущий узел 121 выбирает подходящий алгоритм синхронизации, чтобы синхронизировать каждый из распределенных ему узлов 122_1-122_n. В некоторых сетевых конфигурациях ведущему узлу может потребоваться реализовать алгоритм ПВОВ, чтобы синхронизировать один узел, и ПВСОВ, чтобы синхронизировать другой узел одной и той же подсети. В некоторых вариантах осуществления выбирается подсеть для более эффективной реализации ПВОВ. ПВСОВ и ПВМВСОВ могут выбираться центром управления для синхронизации ведущих узлов с опорной точкой отсчета времени центра управления.
Выбор подходящего алгоритма синхронизации придает системе гибкость, поскольку она может быть приспособлена к любой сети, будь то локальная, региональная или всемирная сеть, так как в каждом случае может выбираться наиболее подходящий алгоритм синхронизации в зависимости от расстояния между узлами.
Например, в настоящем варианте осуществления, в котором узлы должны синхронизироваться для приложения в локальной области, может использоваться способ переноса времени в зоне общей видимости (ПВОВ), чтобы синхронизировать узел 122_x с его ведущим узлом 121_x. В таких методах переноса времени, как ПВОВ, навигационные сигналы идеальны для переноса времени, поскольку они формируются очень стабильными источниками и местоположение передающих устройств известно с хорошей точностью.
Фиг.6 иллюстрирует метод ПВОВ, который основывается на данных измерений, полученных ведущим узлом (например, 121_1) и одним из распределенных ему сетевых узлов 122_1 благодаря сигналу от спутника GNSS спутниковой системы 130, передаваемого в момент времени T130. Каждое приемное устройство узла (ведущего 121_1 или сетевого 122_1) измеряет разницу во времени между приемом и передачей сигнала от спутника, причем Δt121 отображает приращение времени относительно собственного локального тактового генератора 1202 ведущего узла, а Δt122 отображает приращение времени относительно локального тактового генератора 1302 сетевого узла, соответственно. Сетевой узел 122_1 отправляет на ведущий узел 121_1 данные ρ122_1 измерений (ρ122_1 = Δt122· c, где c представляет собой скорость света) вместе с соответствующими данными об окружающей среде и о положении. После этого ведущий узел 121_1 корректирует все принятые данные измерений с учетом данных от устройства 1205 контроля за состоянием окружающей среды для своих собственных измерений и от устройства 1305 контроля за состоянием окружающей среды для измерений на сетевом узле, и данных о положении собственных R130-121_1 и сетевого узла R130-122_1 относительно положения спутника GNSS.
Измерение на тактовом генераторе 1202 ведущего узла сигнала от спутника 130 GNSS тогда может задаваться в виде:

где T121 является временем опорного тактового генератора 1202 ведущего узла, T130 является временем передачи сигнала от спутника 130 GNSS, и Δt121 отображает задержку распространения сигнала между спутником 130 и приемным устройством 1201.
Аналогично, измерение на тактовом генераторе 1302 сетевого узла сигнала от спутника 130 GNSS тогда может задаваться в виде:

где T122 является временем тактового генератора 1302 сетевого узла, T130 является временем передачи сигнала от спутника 130 GNSS, и Δt122 отображает задержку распространения сигнала между спутником 130 и приемным устройством 1301.
На измерения, полученные приемными устройствами GNSS каждого узла, воздействуют погрешности согласно формуле:
где R130-122_1 является геометрическим расстоянием между спутником 130 GNSS и приемным устройством сетевого узла 122_1, и оно известно как наклонная дальность.
Обрабатывающее устройство 1204 ведущего узла 121_1 использует данные от устройства контроля за состоянием окружающей среды для корректирования данных измерений, исключая вклад εионосфера + εтропосфера, который является наиболее весомым. Для расчета синхронизации между локальной ведущей опорной точкой отсчета времени атомного тактового генератора 1202 ведущего узла 122_x и временем атомного тактового генератора 1302 узла 122_1 разность между ведущим узлом 121_x и сетевым узлом 122_x может рассчитываться следующим образом:

с исключением времени T130 спутника. Это является принципом работы ПВОВ, но, в действительности, это оказывает влияние на измерения и, учитывая, что  , основное уравнение, согласно которому действует алгоритм, представляет собой:
, основное уравнение, согласно которому действует алгоритм, представляет собой:
 Итак, данные о положении используются для оценки R130-12x_1, данные об окружающей среде используются для исключения, насколько возможно, вклада εионосфера + εтропосфера, а алгоритм ПВОВ оптимизируется, чтобы снизить до минимума εостаточн.
Итак, данные о положении используются для оценки R130-12x_1, данные об окружающей среде используются для исключения, насколько возможно, вклада εионосфера + εтропосфера, а алгоритм ПВОВ оптимизируется, чтобы снизить до минимума εостаточн.
Алгоритм ПВОВ может дать точность в пределах 1-10 нс. Если расстояние между ведущим узлом 121_1 и системным узлом 122_1 мало по сравнению с расстоянием между тем или иным узлом и спутником, то можно пренебречь влиянием задержек распространения сигнала.
Этот процесс может повторяться для каждого спутника в зоне общей видимости этих двух узлов с конечным временным сдвигом, вычисляемым как средняя величина сдвигов, вычисленных для каждого спутника в зоне общей видимости. Также следует учесть, что процесс может повторяться для некоторого количества спутников в зоне общей видимости этих двух узлов, но необязательно для всех видимых спутников - могут предполагаться некоторые пределы или ограничения, например, для маловысотных спутников.
Затем применяется аналогичный способ для вычисления временного интервала между ведущей опорной точкой отсчета времени ведущего узла 121_1 и опорной точкой отсчета времени центра 110 управления. Таким образом, ведущий узел 121_1 и сетевой узел 122_1, синхронизированный с ведущим узлом 121_1, синхронизируется с опорной точкой отсчета времени центра 110 управления.
Аналогичный способ может применяться для вычисления временного интервала между каждым сетевым узлом 122 и соответствующим ему ведущим узлом 121, временного интервала между каждым ведущим узлом 121 и центром 110 управления и для вычисления временного интервала между сетевыми узлами 122_0, назначенными центру 110 управления, и центром 110 управления. Таким образом, каждый из сетевых узлов 121, 122 синхронизируется относительно опорной временной шкалы центра 110 управления.
Поскольку синхронизация узлов распределяется по подсетям, нагрузка обработки данных и вычислительная нагрузка в центре 110 управления снижаются и разделяются между выбранными ведущими узлами 121.
Центр управления будет продолжать контролировать состояние узлов через равные промежутки времени, например на уровне минут. Если, например, рабочие характеристики тактового генератора 1202 выбранного ведущего узла 121_y начинают ухудшаться, такой узел больше не будет назначаться в качестве ведущего узла, и другой узел подсети заменит этот узел в качестве ведущего узла. Новый узел, заменяющий прежний ведущий узел, будет выбираться в зависимости от результата ранжирования узла из числа узлов этой подсети.
Конфигурация или компоновка/топология сети может изменяться, например, если один или более сетевых узлов 122_x является подвижным и перемещается дальше от назначенного ему ведущего узла 121_x и ближе к другому ведущему узлу 121_y. В этом случае центр 110 управления так меняет конфигурацию сети, чтобы узел 122_x назначался на ближайший для него ведущий узел 121_y. Аналогично, может потребоваться замена ведущего узла 121_x другим сетевым узлом 122_x, если ведущий узел удаляется или удаляются назначенные ему узлы 122, и вследствие новых данных о положении, определяющих компоновку сети, другой узел 122 был бы более подходящим в качестве ведущего узла 121. Дополнительно, если ведущий узел выходит из строя, он может быть заменен другим узлом этой подсети или, в некоторых случаях, другой подсети.
Данные о положении пересылаются на центр 110 управления от каждого из сетевых узлов 122 и ведущих узлов 121 в различных временных интервалах, чтобы компоновка сети могла быть переконфигурирована центром 110 управления.
Таким образом, способ синхронизации демонстрирует ошибкоустойчивость и отказоустойчивость, поскольку неудовлетворительно работающие ведущие узлы могут динамически заменяться.
После стадии синхронизации синхронизируемое приложение может быть запущено. Связь между узлами может шифроваться для обеспечения безопасности. Системы электронно-цифровой подписи с двойным ключом также могут использоваться для защиты приложения.
Дополнительный вариант осуществления настоящего изобретения будет описан со ссылкой на Фиг.7. В дополнительном варианте осуществления задержка времени между сетевым узлом 122 и соответствующим ему ведущим узлом 121 может определяться посредством применения алгоритма, основанного на фазе несущей.
Измерения Φ фаз несущей (выраженные в циклах несущей) могут быть смоделированы в виде:

где ρнаклонная дальность представляет собой истинное расстояние между приемным устройством 1301 сетевого узла или приемным устройством 1201 ведущего узла и фазовым центром передающей антенны спутника 130, Δtприемн и Δtкосм. апп.являются смещением приемного устройства узла и тактового генератора спутника, соответственно, ΔtI и ΔtT являются ионосферными и тропосферными задержками,  является задержкой вследствие многолучевости,
является задержкой вследствие многолучевости,  является собственным шумом приемного устройства при измерениях фаз несущей, и N представляет собой неизвестную целочисленную неоднозначность длины волны. Знак минус у составляющей ионосферного распространения, которая в этом варианте осуществления составляет долю опережения по фазе, является следствием того, что в дисперсионной среде произведение фазовой и групповой скоростей для электромагнитной волны равно c2, и, следовательно, фаза перемещается со скоростью, большей скорости света.
является собственным шумом приемного устройства при измерениях фаз несущей, и N представляет собой неизвестную целочисленную неоднозначность длины волны. Знак минус у составляющей ионосферного распространения, которая в этом варианте осуществления составляет долю опережения по фазе, является следствием того, что в дисперсионной среде произведение фазовой и групповой скоростей для электромагнитной волны равно c2, и, следовательно, фаза перемещается со скоростью, большей скорости света.
Рассматривая предыдущее уравнение, следует отметить, что при выполнении вычитания между двумя результатами наблюдения одного и того же спутника 130, полученными двумя приемными узлами, т.е. приемным устройством 1301 сетевого узла и приемным устройством 1201 соответствующего ему ведущего узла 121, на концах произвольного пространственного вектора будут исключены составляющие, зависящие от отдельного спутника 130. Таким образом, мы можем сформировать первую разность фазы и записать:

где Δρi является разностью между расстоянием от спутника 130 до приемного устройства 1201 ведущего узла и расстоянием от спутника 130 до приемного устройства 1202 сетевого узла, Δτ является составляющей синхронизации между этими двумя приемными устройствами 1201 и 1202, δI, δT и δM являются остаточными задержками из-за ионосферы, тропосферы и многолучевости, не исключенные после дифференцирования, и Ni является разностью между целочисленными неоднозначностями, затрагивающими приемные устройства.
Для небольшой длины пространственного вектора составляющими δI и δT можно пренебречь, так как ионосферная и тропосферная задержка одинакова для обоих приемных устройств. Если положения приемного устройства точно известны и используется метод разрешения неоднозначности, синхронизирующий сдвиг между удаленными приемными устройствами может быть вычислен:
где составляющая err отображает непредусмотренные в модели погрешности.
Для большой длины пространственного вектора составляющими δI и δT нельзя пренебречь. Поэтому в алгоритме синхронизации должны быть предусмотрены модели для оценки ионосферной и тропосферной задержки.
Используя двухчастотный подход, можно исключить ионосферный вклад. В конкретном случае GPS несущие частоты находятся в диапазоне L (сверхвысоких частот), а именно на 1575 МГц (L1) и 1227,6 МГц (L2), что соответствует длине волны λ1, λ2 ≈ 19 и 24 см, соответственно. Комбинация (приращение) измерений фаз несущей на этих частотах создает дополнительный фиктивный сигнал, характеризующийся эквивалентной длиной волны ≈ 86 см и свободный от влияния ионосферы. Это может использоваться для разрешения неоднозначности, и это известно как "широкополосный" метод для разрешения неоднозначности.
Преимущество свободной от влияния ионосферы комбинации состоит в том, что может быть устранена большая систематическая погрешность. Однако одночастотный подход предпочтителен для приложений с короткими пространственными векторами (например, порядка 100-200 км), поскольку ионосферный вклад может считаться равным на приемных устройствах этих двух узлов и, кроме того, устраняться при первом разностном приближении.
Положим γ равным (L1/L2)2, тогда можно объединить двухчастотные измерения по коду и измерения фаз, чтобы вычислить свободные от влияния ионосферы измерения, т.е. измерения, независимые от условий ионосферы:

Как упоминалось ранее, алгоритм синхронизации, основанный на фазе несущей, требует обработки для разрешения неоднозначности. Неоднозначность может быть оценена и исключена из измерений фаз несущей, так как она порождает погрешность Nλ(m) во время синхронизации. Для приложения переноса времени неоднозначность, которая должна быть оценена, является разностью составляющих Ni (= N1--N2) между неоднозначностями этих двух приемных устройств.
Начальная оценка неоднозначности может быть найдена посредством выполнения вычитания измерений первой разности кода и фазы, полученных в один и тот же момент для одного и того же спутника спутниковой системы 130. Эта начальная оценка не всегда правильна из-за различных вкладов погрешности, но она предоставляет приемлемую отправную точку для локального поиска. Поскольку неоднозначность является целочисленным значением, погрешности в ее оценке порождают погрешности в синхронизации, кратные длине волны. В случае свободных от влияния ионосферы комбинаций, погрешность синхронизации может быть кратной 0,86 м.
Для уменьшения этой проблемы можно выбрать время интервала так, чтобы алгоритм разрешения неоднозначности мог обрабатывать все последовательные измерения, получаемые в течение рассматриваемого отрезка времени. Используя этот подход, алгоритм дает стабильное разрешение неоднозначности.
Для приложений синхронизации по времени ограничение, связанное с фиксированным пространственным вектором, при котором расстояние между системным узлом 122 и соответствующим ведущим узлом не изменяется, немного уменьшает проблему, так как неоднозначность может, по существу, разрешаться один раз. Однако проскальзывания циклов из-за приемного устройства, внезапные ионосферные возмущения (мерцания) или проскальзывания фазы в передающей аппаратуре спутника требуют непрерывного контролирования неоднозначности, чтобы избежать погрешностей, которые будут проявляться в решении. Чтобы избежать погрешностей из-за проскальзывания цикла, перед алгоритмом разрешения неоднозначности должен быть предусмотрен алгоритм Обнаружения Проскальзывания Цикла.
Этот процесс может повторяться для каждого спутника в Общем Поле Обзора этих двух приемных устройств. Окончательный временной сдвиг может вычисляться как среднее значение синхронизаций, вычисленных для каждого спутника в зоне общей видимости этих двух узлов.
Разрешение в измерениях фаз несущей связано с мощностью принимаемого сигнала, тепловым шумом, коэффициентом шума соответствующей антенны и приемного устройства, шириной полосы пропускания системы фазовой автоподстройки несущей в приемном устройстве и стабильностью частоты гетеродина. Учитывая все эти параметры, типичное современное приемное устройство способно восстанавливать фазу несущей с ≈ 5 мм (среднеквадратичное значение) добавленным шумом, главным образом, вследствие теплового шума.
Ввиду недостаточных измерений фаз несущей, развитие методов синхронизации, основанных на фазе несущей, обеспечивает способность предоставления возможностей переноса времени на уровне десятков пикосекунд для континентального пространственного вектора (1000-4000 км).
Алгоритм, основанный на фазе несущей и описываемый в этом варианте осуществления, может позволить точно синхронизироваться всей сети приемных устройств. Действительно, он может использоваться вместо алгоритма синхронизации в зоне общей видимости на основе кода в алгоритме ПВСОВ.
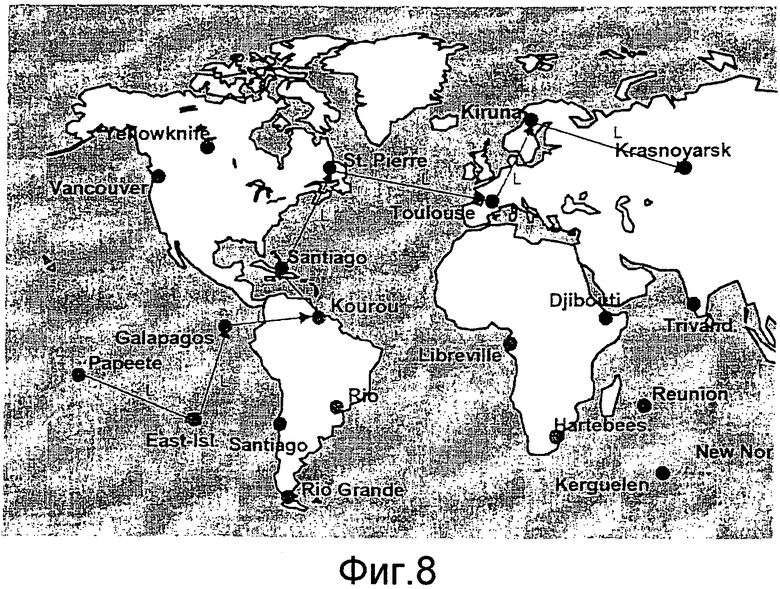
В альтернативных вариантах осуществления настоящего изобретения для региональных приложений, например, в которых сеть охватывает расстояния в диапазоне 300-5000 км, может использоваться метод переноса времени в связанной зоне общей видимости (ПВСОВ) для определения временного сдвига между узлами сети. В этом методе метод переноса времени в зоне общей видимости может быть оптимизирован при помощи соседней (связанной) синхронизации, в которой метод переноса времени в зоне общей видимости применяется между одним узлом и различными соседними узлами сети для определения временных сдвигов.
Используя Метод Общей Зоны Видимости, при условии достаточного количества спутников в поле обзора в зоне общей видимости пары сетевых узловых станций, некоторое количество измерительных узловых станций может быть взаимосвязано посредством реализации метода ПВСОВ (переноса времени в связанной зоне общей видимости) для предоставления временного сдвига между отдельными парами узловых тактовых генераторов станции, а также временного сдвига между узлами в удаленных областях, не находящихся в зоне общей видимости.
Эта ситуация изображена на Фиг.8, причем изображены только несколько связей, чтобы излишне не загромождать чертеж. ПВСОВ не только позволяет определять временной сдвиг между соседними станциями, но также и измерять, получая многократные приращения, временной сдвиг между несоседними станциями, например, между Папеэте (Papeete) и Красноярском для изображенных связей.
Сам по себе метод ПВСОВ, хотя и является простым и эффективным в вычислительном отношении, имеет некоторые недостатки. Одним из главных недостатков является то, что при использовании методов связанной зоны общей видимости единственная шумная область может снизить точность синхронизации.
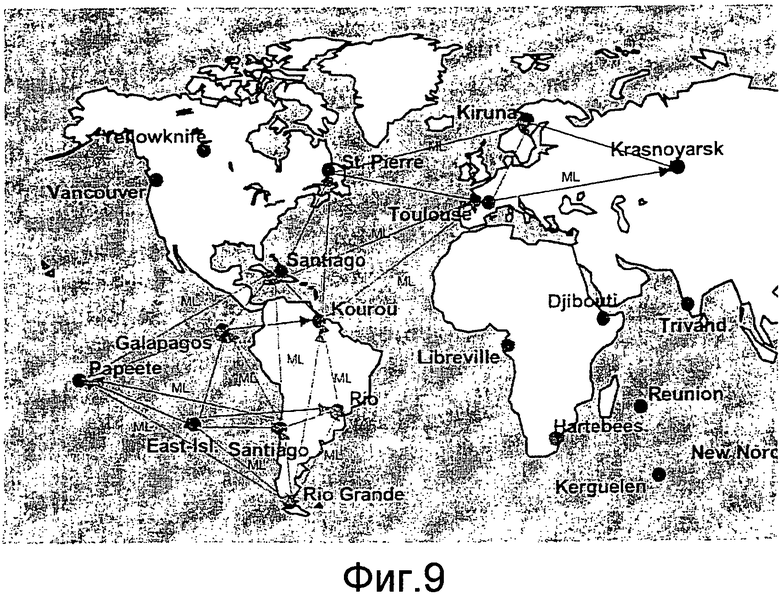
В других дополнительных вариантах осуществления настоящего изобретения усовершенствование этого метода может быть получено путем синхронизации двух удаленных узловых станций с использованием подхода переноса времени в многовариантной связанной зоне общей видимости (ПВМВСОВ). Действительно, существует много возможных маршрутных связей между двумя станциями, расположенными далеко друг от друга и не разделяющие общее поле обзора, как изображено на Фиг.9. Чтобы увеличить количество доступных данных, а следовательно, повысить точность синхронизации, можно использовать все возможные маршрутные связи. Обеспечивая множественные независимые измерения, которые могут быть усреднены, можно уменьшить измерение шумов. Такой подход является статистически более надежным, чем односвязная зона общей видимости.
Также следует учесть, что в некоторых вариантах осуществления настоящего изобретения может использоваться комбинация различных вышеописанных методов для определения смещений между системными/сетевыми узлами и ведущими узлами, ведущими узлами и центром управления, системными узлами и центром управления в зависимости от расстояния между задействованными узлами.
В альтернативных вариантах осуществления настоящего изобретения для одного или более системных узлов в качестве методов синхронизации могут использоваться следующие:
• Двусторонний перенос времени и частоты через спутник, улучшенные версии (частота: 1E-14 в пределах 100 с, стабильность по времени: 30 пс, точность времени: 300 пс … 1 нс),
• Передача сигналов точного времени через геостационарные спутники, в том числе EGNOS (выделенные службы),
• Передача сигналов точного времени через геостационарные спутники (Встроенная служба внутри потоков цифровых данных),
• Передача сигналов точного времени через LEO-системы спутниковой связи (LEO - низкая околоземная орбита),
• Передача сигналов точного времени через GEO-системы спутниковой связи (GEO - геостационарная околоземная орбита),
• GTS: Глобальная Система Времени, полностью финансируемая, работающая на борту МКС, запущена в 2001 году (выделенная служба), точность: 10 мкс … 1 мс,
• ACES (группа атомных тактовых генераторов в космосе),
• GPS в зоне общей видимости в реальном времени (0,1 … 3 нс),
• Усовершенствованные оптические линии связи.
Несмотря на то, что способ и система первого варианта осуществления настоящего изобретения были описаны в отношении спутниковых систем GPS, нужно понимать, что этот способ может также применяться спутниковыми системами Galileo, GLONASS или COMPASS при наличии узлов, снабженных приемными устройствами, приспособленными для приема сигналов от этих спутниковых систем. Для примера, приемные устройства могут быть трех/многочастотными приемными устройствами.
Несмотря на то, что настоящее изобретение было описано выше со ссылкой на конкретные варианты осуществления, настоящее изобретение не ограничивается этими конкретными вариантами осуществления, и специалисту в данной области техники будут очевидны модификации, которые находятся в пределах объема настоящего изобретения.
Изобретение относится к синхронизации множества разнесенных узлов сети с опорной точкой отсчета времени центра управления, что является фундаментальным требованием во многих областях применения, и предназначено для уменьшения расчета временной синхронизации узлов сети посредством того, что нагрузка вычислений и обработки данных распределяется от центрального обрабатывающего устройства на одно или более ведущих обрабатывающих устройств. Изобретение раскрывает, в частности, способ, который содержит этапы, на которых принимают данные измерений от каждого из множества узлов; ранжируют множество узлов относительно друг друга согласно данным измерений; выбирают один или более ведущих узлов из множества узлов согласно результату ранжирования; назначают каждый из множества узлов на соответствующий ведущий узел; определяют первый временной сдвиг между локальным временем, измеренным на каждом узле, и локальным временем, измеренным на соответствующем ему ведущем узле, и определяют второй временной сдвиг между каждым из ведущих узлов и опорной точкой отсчета времени таким образом, что может быть определен временной сдвиг между локальным временем, измеренным на каждом узле, и опорной точкой отсчета времени. 3 н. и 10 з.п. ф-лы, 11 ил.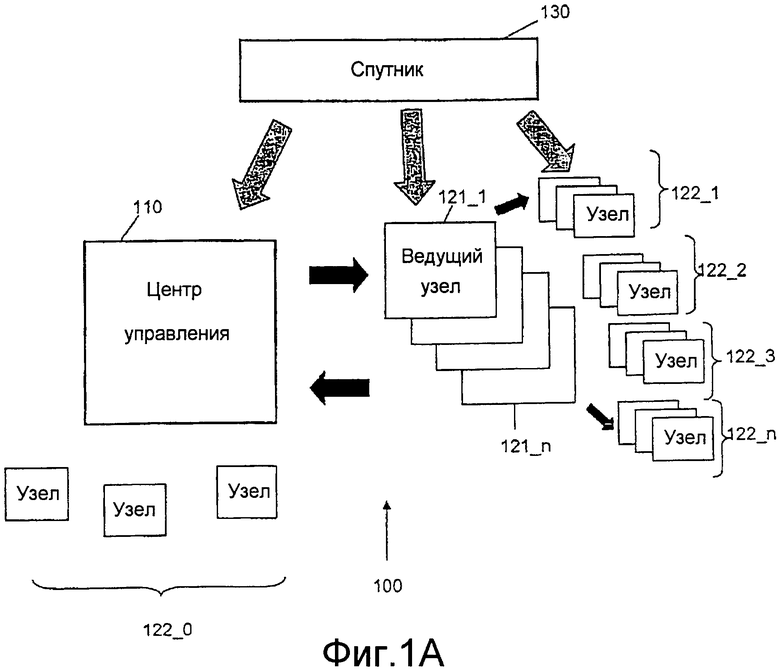
1. Способ синхронизации множества узлов сети с опорной точкой отсчета времени центра управления, причем способ содержит этапы, на которых:
- принимают данные измерений от каждого из множества узлов;
- ранжируют множество узлов относительно друг друга согласно данным измерений;
- выбирают один или более ведущих узлов из множества узлов согласно результату ранжирования;
- назначают каждый из множества узлов на соответствующий ведущий узел;
- определяют первый временной сдвиг между локальным временем, измеренным на каждом узле, и локальным временем, измеренным на соответствующем ему ведущем узле, и
- определяют второй временной сдвиг между каждым из ведущих узлов и опорной точкой отсчета времени таким образом, что может быть определен временной сдвиг между локальным временем, измеренным на каждом узле, и опорной точкой отсчета времени.
2. Способ по п.1, в котором данные измерений содержат данные о положении, отображающие географическое положение соответствующего узла.
3. Способ по п.2, дополнительно содержащий этап, на котором определяют географическое распределение узлов согласно данным о положении, при этом каждый из множества узлов назначается соответствующему ведущему узлу или центру управления в зависимости от положения узла относительно положения ведущего узла или центра управления.
4. Способ по любому из предыдущих пунктов, в котором данные измерений содержат данные о рабочих характеристиках, отображающие рабочие характеристики соответствующего узла.
5. Способ по п.1, в котором данные измерений содержат данные об окружающей среде, отображающие локальную окружающую среду соответствующего узла.
6. Способ по п.4, в котором данные о рабочих характеристиках содержат данные о рабочих характеристиках тактового генератора, отображающие рабочие характеристики тактового генератора соответствующего узла.
7. Способ по п.1, в котором первый временной сдвиг и/или второй временной сдвиг определяются посредством применения алгоритма, выбранного из группы алгоритмов переноса времени в зоне общей видимости, переноса времени в связанной зоне общей видимости и переноса времени в многовариантной связанной зоне общей видимости.
8. Способ по п.1, в котором первый временной сдвиг и/или второй временной сдвиг определяются посредством применения алгоритма, основанного на фазе несущей.
9. Способ по п.7 или 8, в котором алгоритм синхронизации выбирается каждым ведущим узлом или центром управления в зависимости от положения сетевого узла относительно соответствующего ведущего узла или центра управления.
10. Способ по п.4, в котором от каждого узла принимаются обновленные данные о рабочих характеристиках, чтобы повторно ранжировать узлы согласно рабочим характеристикам узла и выбирать узел в качестве ведущего узла согласно результату ранжирования.
11. Способ по п.2, в котором от узлов сети принимается обновленная информация о положении, и ведущий узел выбирается из множества узлов согласно обновленной информации о положении.
12. Устройство синхронизации для синхронизации множества узлов сети с опорной временной шкалой, причем устройство содержит:
- приемное устройство GNSS (Глобальная Спутниковая Навигационная Система), функционально связанное с GNSS-антенной;
- источник времени, задающий локальное время;
- средство передачи данных для приема данных от одного или более узлов и/или передачи на них данных;
- средство ранжирования, выполненное с возможностью ранжировать узлы относительно друг друга согласно данным измерений, передаваемым узлами;
- средство выбора, выполненное с возможностью выбирать один или более ведущих узлов из множества узлов согласно результату ранжирования узлов;
- средство назначения, выполненное с возможностью назначать каждый из множества узлов соответствующему ведущему узлу или центру управления;
- средство определения временного сдвига, выполненное с возможностью определять первый временной сдвиг между локальным временем, измеренным на каждом узле, и локальным временем, измеренным на соответствующем ему ведущем узле, и выполненное с возможностью определять второй временной сдвиг между каждым из ведущих узлов и опорной временной шкалой таким образом, что может быть определен временной сдвиг между локальным временем, измеренным на каждом узле, и опорной временной шкалой.
13. Система синхронизации для синхронизации множества узлов сети с опорной временной шкалой, причем система содержит устройство синхронизации по п.12 и множество сетевых узлов, при этом каждый из сетевых узлов снабжается приемным устройством GNSS и локальным источником временных интервалов.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 5363375 A, 08.11.1994 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 1997 |
|
RU2146833C1 |
| DE 3049010 A1, 15.07.1982 | |||
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2115946C1 |

