Изобретение относится к устройству контроля токами Фуко тангенциальных ячеек роторного диска турбомашины. В частности, оно относится к улучшению, позволяющему быстро и точно устанавливать средства контроля, иметь быстрый прием данных и более надежные и более точные измерения. Устройство в наибольшей степени адаптировано для контроля поверхностей давления, называемых тангенциальными ячейками.
Известен зонд с токами Фуко, называемый мультиэлементным, связанный с системой получения изображений, специально разработанный для перемещения вдоль тангенциальной ячейки диска ротора. Прямолинейный зонд имеет постоянное сечение; его поперечный контур соответствует сечению ячейки, подлежащей контролю. Зонд содержит в себе множество датчиков с токами Фуко, устанавливаемых для квази-одновременного сбора нескольких партий данных в течение одного прохода сканирования, производимого в продольном направлении ячейки. Каждая партия данных соответствует сканированию продольной ленты внутренней поверхности ячейки одним и тем же датчиком. Зонд перемещается вручную.
Надежность и точность измерений зависят от правильной установки зонда в ячейке. Поэтому датчики объединяются в центральное звено зонда между двух направляющих звеньев, которые этого лишены. Таким образом, зонд надежно установлен даже на крайних положениях ячейки, когда датчики начинают сканировать состояние площади ячейки.
Несмотря на то, что объединение такого мультиэлементного зонда с системой получения изображений имеет свои преимущества, технические характеристики системы ограничены наличием направляющих звеньев, то есть невозможностью располагать датчики на краях зонда. Из этого следует, что на самом деле контроль имеет высокую точность только в том случае, если имеется возможность перемещать центральное звено зонда по всей длине ячейки. Это возможно на полностью демонтируемом диске, когда зонд может быть введен через одно крайнее положение ячейки и извлечен через другое положение. Однако, при необходимости проверки ротора, образованного несколькими соединенными друг к другу дисками (спаянными), такое перемещение не всегда возможно.
Изобретение позволяет улучшить условия приведения в действие мультиэлементного зонда для контроля тангенциальных ячеек диска ротора, в частности, для контроля поверхностей давления этих ячеек.
Более точно, изобретение относится к устройству контроля токами Фуко тангенциальных ячеек диска ротора типа содержащего зонд, поперечный контур которого соответствует контуру сечения такой ячейки, причем вышеуказанный зонд объединяет множество датчиков, устанавливаемых для приема нескольких партий данных в течение одного прохода сканирования, производимого в продольном направлении ячейки, отличающийся тем, что оно содержит опору, включающую в себя два органа позиционирования, взаимодействующие соответственно с ячейками, соседними с контролируемой ячейкой, и подвижное перемещаемое оборудование, на котором закреплен зонд, организованное таким образом, чтобы его можно было направлять вдоль вышеуказанной ячейки в процессе контроля.
С определенной выше схемой позиционирование зонда становится точным с начала его перемещения внутри ячейки, и измерения, таким образом, становятся более точными и более надежными. Перемещение зонда вдоль ячейки может быть легко освоено, даже вручную. Кроме того, в соответствии с другой преимущественной характеристикой датчики могут быть распределены на большой длине зонда и даже по существу на всей его длине, в том числе краевые, наиболее удаленные области. Другими словами направляющие звенья, упомянутые выше, могут быть ликвидированы, что позволит лучше обследовать ячейки на всей их длине, даже если диск соединен с другим диском.
В соответствии с другой преимущественной характеристикой зонд образован двумя подвижными ползунами. Датчики распределены в ползунах. Ползуны соединены шарнирно с упругим напряжением, направленным во внешнюю часть (с удалением друг от друга), чтобы обеспечить контакт вышеуказанных ползунов с соответствующими областями ячеек, подлежащих контролю. Эти области включают, в частности, упомянутые выше поверхности давления.
Кроме того, для контроля положения и/или продвижения зонда в ячейке, подлежащей контролю, могут быть предусмотрены средства индексации.
В соответствии с возможным способом реализации два органа позиционирования содержат два расширяемых элемента, дистанцированных один от другого на расстоянии, соответствующем расстоянию, которое разделяет вышеуказанные соседние ячейки. Эти элементы согласованы и распределены таким образом, чтобы взаимодействовать и быть неподвижно размещенными в вышеуказанных соседних ячейках, что позволяет расположить опору так, чтобы вышеуказанный зонд мог быть введен в вышеуказанную ячейку, подлежащую контролю.
Преимущественно, устройство укомплектовано многоканальным генератором-приемником. Такой генератор-приемник позволяет активировать все датчики одновременно в различных позициях зонда в вышеуказанной ячейке, подлежащей контролю. В фазе приема он позволяет иметь синхронизацию сбора данных.
Изобретение будет лучше понято, а также другие его преимущества станут более очевидны в свете нижеследующего описания устройства контроля токами Фуко в соответствии с принципом, приводимом исключительно в качестве примера со ссылкой на прилагаемые чертежи, на которых:
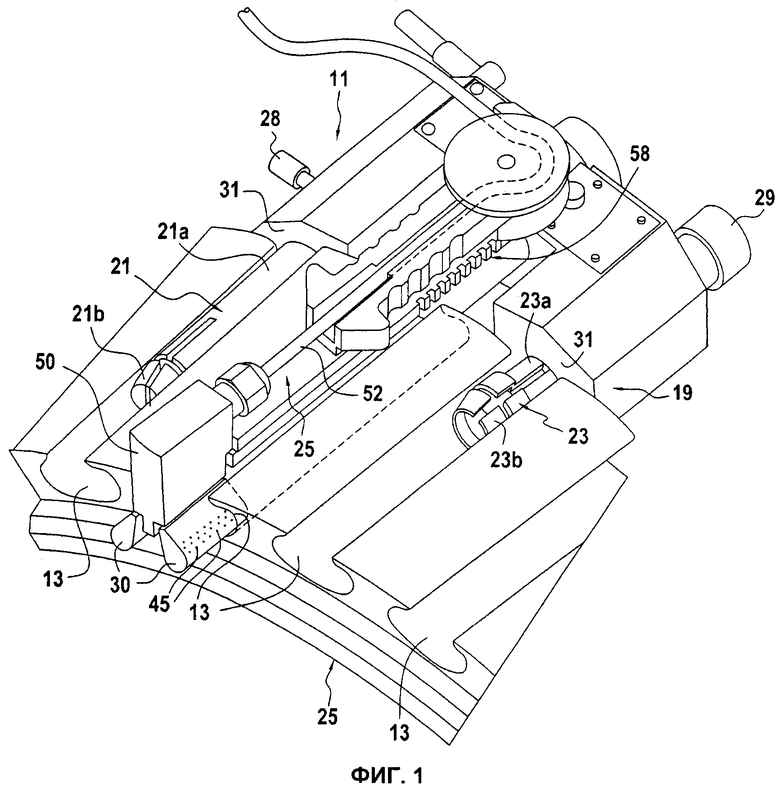
Фиг.1 представляет общий вид в перспективе устройства проверки в соответствии с изобретением, установленного на периферии диска ротора для контроля токами Фуко одной из ячеек;
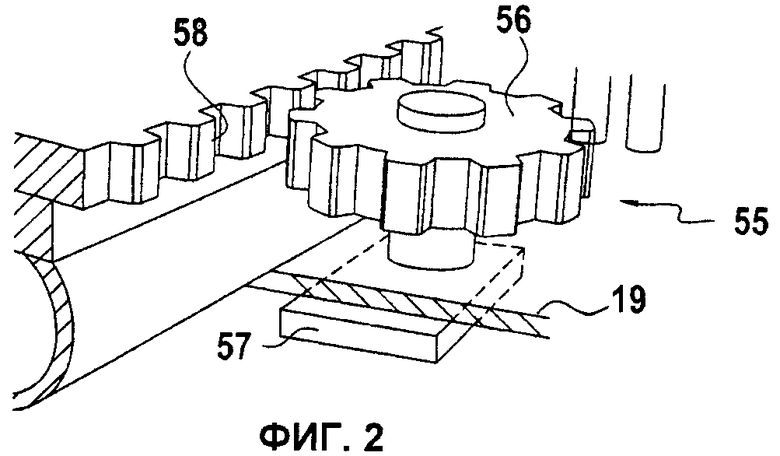
Фиг.2 представляет подробный вид, иллюстрирующий средства индексации; и
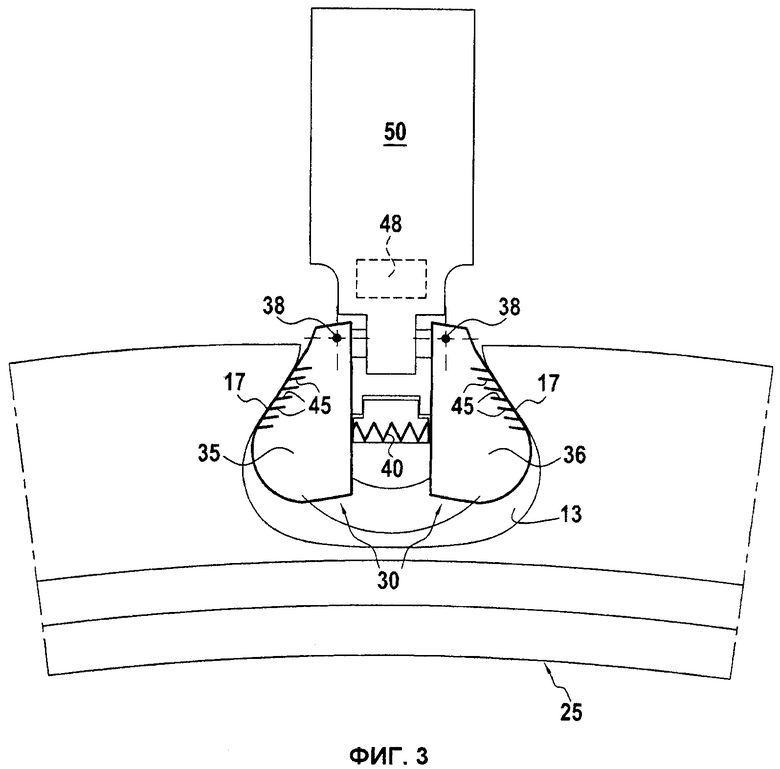
Фиг.3 представляет другой подробный вид, иллюстрирующий структуру зонда.
На чертежах представлено устройство управления токами Фуко 11, способное обнаруживать дефекты поверхности (или слегка скрытые) тангенциальных ячеек 13, определенных на периферии диска ротора 15. Известно, что эти ячейки удерживают основания лопаток. Такая ячейка 13 имеет, в частности, две поверхности, называемые «поверхность давления» 17, на которые опирается основание лопатки под действием центробежной силы. Особенно важен контроль состояния этих поверхностей давления, специально проводимый во время систематических проверок технического обслуживания. Таким образом, можно обнаружить образование усталостных трещин на этих поверхностях давления.
Устройство содержит опору 19, включающую два органа позиционирования 21, 23, способных соответственно взаимодействовать с ячейками, соседними с ячейкой, подлежащей контролю. Эти органы позиционирования образованы параллельными тягами 21а, 23а, каждая из которых включает в себя расширяемый кольцевой элемент 21b, 23b. Эти тяги, снабженные расширяемыми элементами, размещены на расстоянии друг от друга, соответствующем расстоянию, разделяющему соседние ячейки от ячейки, подлежащей контролю, в частности, две самые ближние ячейки, расположенные с одной и с другой стороны от контролируемой ячейки. На опоре 19, выполненной обычно в виде детали V-образной формы, крепится подвижное перемещающееся оборудование 25, на котором смонтирован зонд с токами Фуко 30 многоэлементного типа. Подвижное оборудование перемещается вдоль направляющей, определенной в опоре. Конструкция выполнена таким образом, чтобы зонд 30 мог быть введен в тангенциальную ячейку, подлежащую контролю, когда обе тяги 21а 23а вводятся в две соседние ячейки и неподвижно закрепляются в них, благодаря расширяемым элементам 21b, 23b. Различают фиксированную тягу, вводимую первой в соседнюю ячейку, и подвижную тягу 23b, перемещающуюся в опоре 19, которая вводится второй в соседнюю ячейку.
Расширяемый элемент 21b фиксированной тяги управляется боковым рычагом 28, в то время как расширяемый элемент 23b подвижной тяги управляется колесиком 29, расположенным на его заднем конце.
Опора 19 содержит две ограничительные поверхности 31. Тяги 21а, 23а образуют соответственно выступы этих поверхностей.
Когда две тяги находятся в неподвижном состоянии в двух ячейках, соседних с ячейкой, подлежащей контролю, опора устанавливается таким образом, чтобы ограничительные поверхности 31 упирались бы на диск 15, и чтобы подвижное оборудование и зонд были точно расположены напротив конца ячейки, подлежащей контролю, чтобы вышеуказанный зонд мог туда войти.
Зонд 30 можно выполнить в виде одного блока из пластикового материала, объединяющего датчики. Этот блок может иметь поперечный контур, воспроизводящий, по крайней мере частично, контур сечения ячейки 13. В описанном примере, однако, зонд 30 содержит два симметричных ползуна 35, 36, шарнирно соединенными друг с другом параллельными поворотными осями с эластичным напряжением, направленным во внешнюю часть, то есть с удалением друг от друга с помощью пружины 40. Такое расположение гарантирует контакт ползунов на соответствующих областях ячейки, подлежащей контролю, а более точно, вышеуказанных поверхностей давления 17. Такой вид установки предполагает сближение ползунов друг к другу в момент введения зонда в ячейку.
Датчики 45 с токами Фуко расположены на нескольких линиях внутри каждого ползуна 35, 36 для получения перекрытия при перемещении зонда вдоль тангенциальной ячейки. Датчики могут быть распределены по существу на всей длине зонда, включая его конечности. В частности, преимущественным является расположение нескольких датчиков 45 в передней части зонда 30 (рассматривая его направление перемещения). Кроме того, как можно большее количество датчиков можно расположить спереди каждого ползуна 35 для сканирования конечной части тангенциальной ячейки, даже если она не сквозная.
Провода датчиков подключаются к многоканальному, мультиплексному генератору-приемнику 48, который позволяет нагрузить одновременно все датчики при передаче и синхронизировать сбор данных при приеме. Этот генератор-приемник запускается при различных положениях зонда в вышеуказанной ячейке, подлежащей проверке. Такой генератор-приемник 48 может быть установлен в цоколь 50 (образующий часть подвижного оборудования), с которым сочленяются ползуны. Электрический кабель 52 для передачи сигналов связывает этот генератор-приемник с устройством получения изображений (не представленного), содержащего программное обеспечение перестройки и обработки изображения, позволяющее построить читаемый сбор данных, благодаря трансформированию в так называемый формат «C-SCAN».
Для улучшения трансформирования изображения устройство также оборудовано средствами индексации 55 для контроля и/или продвижения зонда 30 в ячейке, подлежащей контролю. Например, зубчатое колесо 56, установленное на опоре 19. Его ось связана с генератором импульсов 57 или аналогичным устройством. Зубчатое колесо находится в зацеплении с зубчатой рейкой 58, прямолинейной, установленной на перемещающемся подвижном оборудовании 25.
Таким образом, устройство сбора данных относительно не зависит от оператора, в частности от скорости, с которой оно перемещает подвижное устройство, на котором установлен зонд. Подвижное оборудование могло бы быть оснащено двигателем для обследования с постоянной, заранее определенной скоростью.
Изобретение относится к средствам контроля диска ротора. Устройство содержит зонд, объединяющий множество датчиков, организованных для сбора нескольких партий данных в течение одного прохода сканирования, причем зонд, установленный на подвижном оборудовании, перемещающимся в опоре, взаимодействует с ячейками, соседними с ячейкой, подлежащей контролю. Изобретение позволяет повысить надежность и точность измерений. 5 з.п. ф-лы, 3 ил.
1. Устройство контроля токами Фуко тангенциальных ячеек (13) диска ротора, типа содержащего зонд (30), поперечный контур которого соответствует контуру сечения такой ячейки, причем вышеуказанный зонд объединяет множество датчиков (45), устанавливаемых для сбора нескольких партий данных в течение одного прохода сканирования, выполняемого в продольном направлении ячейки, отличающееся тем, что оно содержит опору (19), включающую в себя два органа позиционирования (21, 23), взаимодействующих соответственно с ячейками, соседними с ячейкой, подлежащей контролю, и подвижное перемещаемое оборудование (25), на котором закреплен зонд, организованное таким образом, чтобы его можно было направлять вдоль вышеуказанной ячейки во время контроля.
2. Устройство контроля по п.1, отличающееся тем, что два органа позиционирования содержат два расширяемых элемента (21b, 23b), расположенных друг от друга на расстоянии, соответствующем расстоянию, которое разделяет вышеуказанные соседние ячейки, причем вышеуказанные элементы установлены для взаимодействия с этими ячейками и неподвижного закрепления в них для установки вышеуказанной опоры таким образом, чтобы вышеуказанный зонд мог быть введен в вышеуказанную тангенциальную ячейку, подлежащую контролированию.
3. Устройство по п.1 или 2, отличающееся тем, что оно содержит средства индексации (55) для контроля положения и/или продвижения зонда (30) в вышеуказанную ячейку, подлежащую контролю.
4. Устройство по п.1, отличающееся тем, что вышеуказанные датчики (45) распределены в ползунах (35) зонда (30), соединенных на шарнирах упруго во внешнем направлении для обеспечения контакта вышеуказанных ползунов с соответствующими областями вышеуказанной ячейки, подлежащей контролю.
5. Устройство по п.1, отличающееся тем, что оно содержит многоканальный генератор-приемник (48) для активации всех датчиков, по существу, одновременно в различных положениях зонда в вышеуказанной ячейке, подлежащей проверке.
6. Устройство по п.1, отличающееся тем, что датчики (45) расположены в передней части зонда (30).
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 7107695 B2, 19.09.2006 | |||
| US 6952094 В1, 04.10.2005 | |||
| Спосб окомкования шихты при производстве легкого заполнителя | 1975 |
|
SU577244A1 |
| СПОСОБ ДИАГНОСТИКИ КОЛЕБАНИЙ РАБОЧЕГО КОЛЕСА ТУРБОМАШИНЫ | 1997 |
|
RU2111469C1 |
| СПОСОБ НАСТРОЙКИ НА РЕЗОНАНСНУЮ ЧАСТОТУ КОЛЕБАНИЯ ИСПЫТЫВАЕМЫХ ЛОПАТОК РАБОЧЕГО КОЛЕСА | 1991 |
|
RU2029274C1 |

