Настоящее изобретение относится к устройству для неразрушающего контроля открытой прямолинейной полости посредством вихревых токов, т.е. полости, имеющей произвольное сечение, по существу постоянно перпендикулярное продольному направлению полости, при этом контроль осуществляют последовательными протягивающими движениями в продольном направлении этой полости. Изобретение относится, в частности, к контролю тангенциальных пазов в диске турбореактивного двигателя, при этом каждый паз предназначен для удержания хвостовика лопатки.
На новом диске или в контексте ремонтной операции процесс контроля тангенциальных пазов на диске турбореактивного двигателя относительно долог, труден и дорог. Обычно используют контроль вихревыми токами. Сложная форма пазов заставляет разрабатывать щуп, специфичный для пазов каждого типа. В настоящее время при разработке высокопроизводительной системы, которую можно автоматизировать, встречаются следующие трудности:
- щуп нужно подводить к зоне сканирования без каких-либо толчков, которые могут повредить датчик;
- зону сканирования следует проходить протягивающим движением рабочего хода со скоростью, постоянной на всей длине контролируемого участка;
следует уменьшить краевые эффекты;
система должна быть способна надежно определять все типы дефектов, независимо от их ориентации относительно протягивающего движения.
Настоящее изобретение направлено на создание нового устройства для неразрушающего контроля, в котором используются вихревые токи и которое позволяет достичь указанных целей.
Более конкретно, согласно изобретению предлагается устройство, в котором используются вихревые токи для неразрушающего контроля открытой прямолинейной полости, при этом устройство отличается тем, что содержит:
тело щупа, содержащее датчик вихревых токов и стержень, при этом датчик установлен латерально рядом со свободным концом стержня и на одной линии с рампой, проходящей от этого свободного конца;
упругое средство смещения, воздействующее на тело щупа перпендикулярно стержню для прижимания тела щупа к контролируемой поверхности, при этом стержень перемещается для описания прямолинейных ходов вдоль его оси последовательными протягивающими движениями, а также тем, что датчик установлен по существу на вершине латерального выступа, имеющего криволинейную и симметричную поверхность, которая создает почти точечный контакт выступа и поверхности полости, при этом рампа образована частью выступа, расположенной между свободным концом стержня и датчиком.
При такой конструкции датчик всегда расположен как можно ближе к образующей линии сканируемой полости во время протягивающего хода. Снятый сигнал представляет (характеризует) состояние поверхности узкой полосы рядом с этой образующей линией. Перемещением тела щупа после каждого протягивающего движения исследуется примыкающая параллельная зона. Таким образом, постепенно последовательными протягивающими движениями можно исследовать всю внутреннюю поверхность полости.
Конкретная форма тела щупа с рампой рядом с датчиком позволяет создавать контакт с контролируемой поверхностью без толчков во время протягивающего хода. Кроме того, когда датчик подходит к кромке отверстия полости, у него было время на стабилизацию скорости, когда рампа находилась в контакте с кромкой полости.
Такая выпуклая и симметричная криволинейность формы позволяет избежать вибраций (из-за почти точечного контакта), которая в ином случае привела бы к возмущениям, к которым вихревые токи особенно чувствительны. Таким образом, повышается надежность измерений.
Латеральный (боковой) выступ предпочтительно выполнен из полимера, а датчик (образованный одной или двумя катушками, на которые подается ток высокой частоты) внедрен в полимер.
Предпочтительно, датчик относится к дифференциальному типу. Поэтому он может содержать две соседние катушки, например катушки, обращенные друг к другу симметрично относительно плоскости.
Каждая катушка может иметь полуэллиптическое сечение.
Для того чтобы можно было обнаружить все дефекты, независимо от их ориентации, предпочтительно, чтобы плоскость образовывала угол с направлением прямолинейного хода стержня, т.е. с направлением протяжки. Например, такой угол может по существу быть равным 45° к направлению протяжки.
Согласно другому преимущественному признаку настоящего изобретения, вышеупомянутое упругое средство смещения содержит подвижное устройство, несущее тело щупа. Подвижное устройство установлено с возможностью скольжения по направляющей перпендикулярно стержню, и между точкой этой направляющей и подвижным устройством установлены пружины.
Преимущественно, подвижное устройство содержит шаровые катки, выполненные с возможностью движения вдоль направляющей.
Согласно еще одному преимущественному признаку, устройство включает робот, который запрограммирован на перемещение тела щупа по контуру отверстия этой полости. Робот позволяет менять положение и ориентацию протяжки так, чтобы постепенно исследовать всю поверхность последовательными протягивающими движениями. Робот можно также запрограммировать на надлежащее выполнение протягивающего хода, т.е. на перемещение тела щупа параллельными прямолинейными ходами.
Далее следует более подробное описание чисто иллюстративного примера устройства контроля с помощью вихревых токов, построенного на принципах настоящего изобретения со ссылками на приложенные чертежи, где:
Фиг.1 - схематический общий вид установки в перспективе;
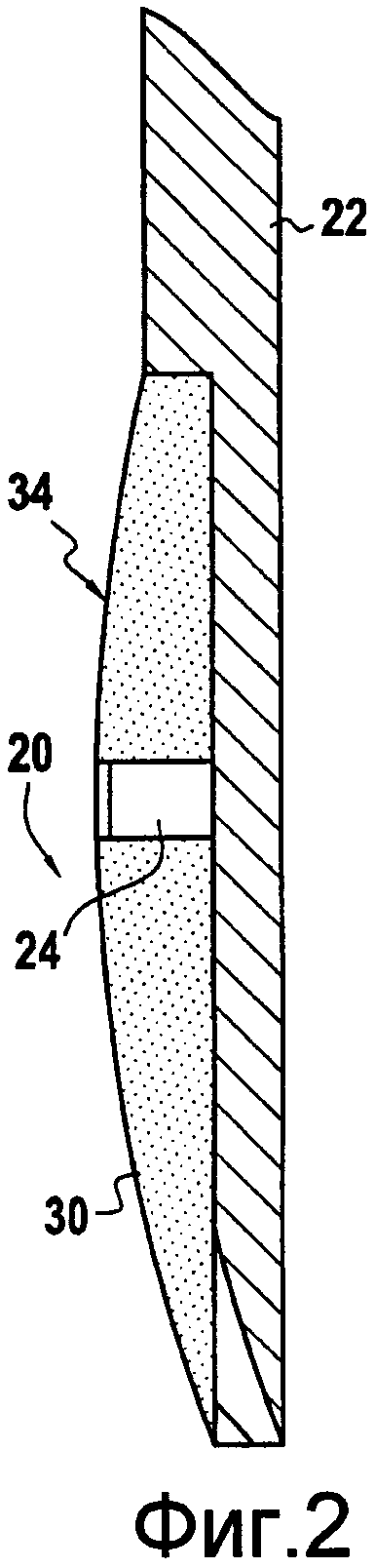
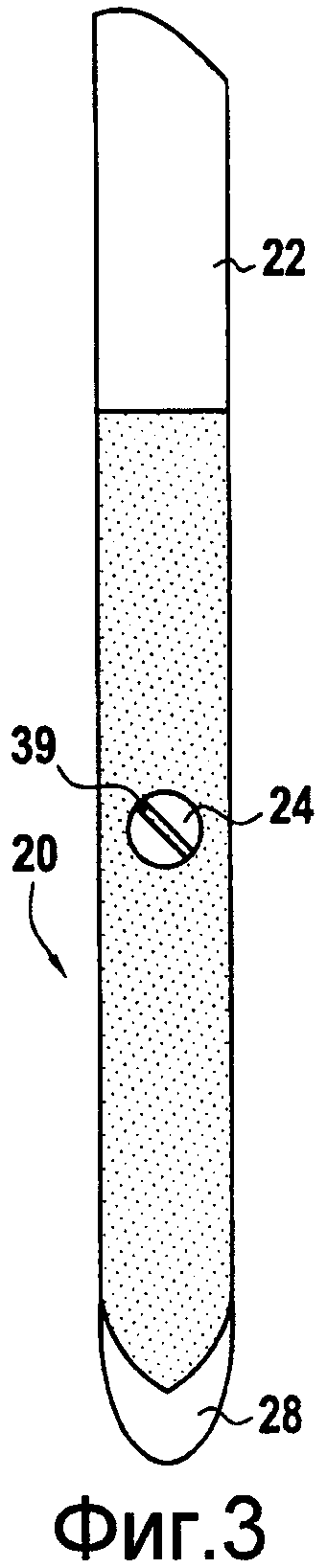
Фиг.2 и 3 - схематические виды тела щупа;
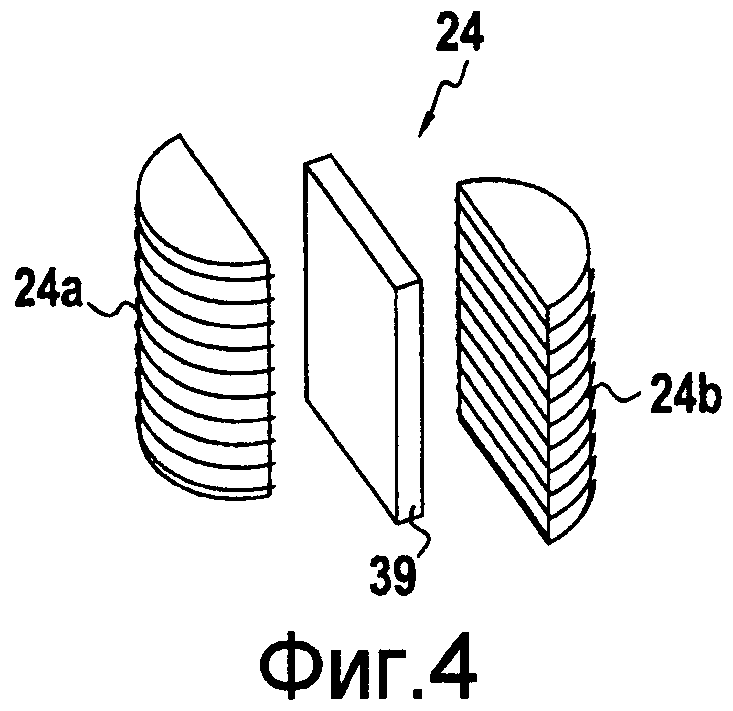
Фиг.4 - детальный вид датчика;
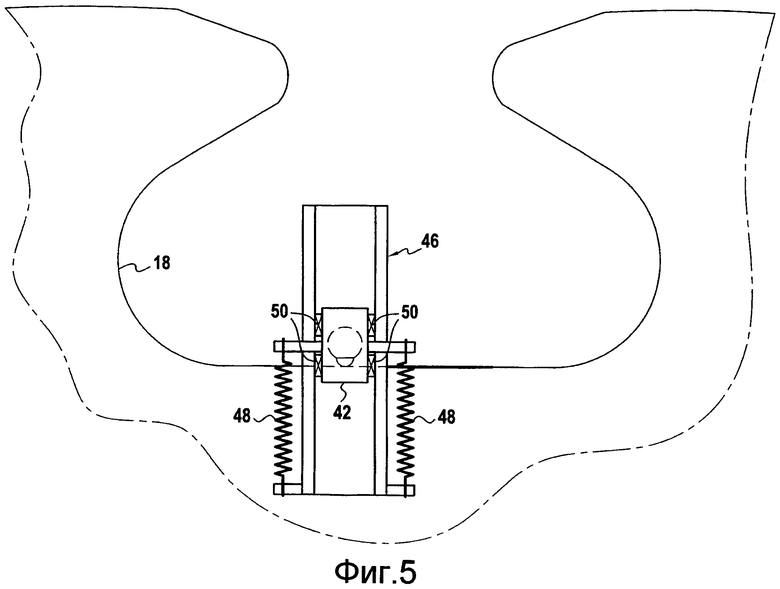
Фиг.5 - схематический вид упругого средства смещения, несущего тело щупа.
Со ссылками на указанные фигуры показано устройство 11 для неразрушающего контроля, в котором используются вихревые токи, и более конкретно, в данном примере, устройство предназначено для контроля тангенциальных пазов в диске 14. Каждый тангенциальный паз является прямоугольной полостью 15, открытой на каждом конце. Сечение полости перпендикулярно ее продольной оси по существу постоянно. Профиль отверстия 18 полости является относительно сложным и состоит из последовательности выпуклых и вогнутых кривых, имеющих разные радиусы кривизны, как показано на фиг.5.
Целью является контроль внутренней поверхности каждой полости последовательными протягивающими движениями, т.е. прямолинейным перемещением в продольном направлении, при осуществлении контакта между щупом и поверхностью полости вдоль образующей линии полости.
Для этой цели устройство контроля содержит тело 20 щупа, содержащее стержень 22 и датчик 24 вихревых токов, а также упругое средство 26 смещения, воздействующее на тело 20 щупа.
Стержень 22 выполнен жестким, а датчик 24 установлен латерально рядом со свободным концом 28 стержня. Она находится на одной линии с рампой 30, которая отходит от этого конца.
Упругое средство 26 смещения воздействует на тело 20 щупа перпендикулярно стержню так, чтобы прижать тело 20 щупа в латеральном направлении к контролируемой поверхности.
Стержень 22 движется протягивающими ходами так, чтобы описать последовательные прямолинейные движения вдоль его продольной оси.
Преимущественно, датчик 24 установлен по существу на вершине латерального выступа 34 с криволинейной поверхностью. Рампа 30 образована участком выступа, который расположен между свободным концом 28 стержня и датчиком 24. За вершиной выступа криволинейная поверхность продолжается, пока не сровняется с цилиндрической поверхностью стержня. Латеральный выступ 34 предпочтительно выполнен из полимера. Датчик 24 внедрен в полимер и подходит очень близко к точке наибольшей толщины (боковому концу) этого выступа 34.
Датчик 24 относится к дифференциальному. Он может быть включен электрическим способом в мост для измерения изменения в импедансе.
В этом примере датчик 24 образован двумя катушками 24а и 24b, расположенными симметрично относительно плоскости. Каждая катушка имеет полукруглое или полуэллиптическое сечение, и прямолинейные участки катушек обращены к противоположным сторонам сепаратора 39, который проходит в этой плоскости, и расположены близко к ним.
Для того, чтобы обнаружить все дефекты, включая те, которые ориентированы параллельно оси протягивания, плоскость сепаратора 39 преимущественно развернута относительно прямолинейного хода стержня. В этом примере этот угол по существу равен 45° (см. фиг.3).
Упругое средство 26 смещения установлено между концом руки 40 робота и телом 20 щупа. Это средство содержит подвижное устройство 42, несущее тело щупа, т.е., более конкретно, стержень 22. Это подвижное устройство 42 само установлено с возможностью скольжения по направляющей 46, перпендикулярной стержню. Между направляющей 46 и подвижным устройством 42 установлены пружины 48. Подвижное устройство также содержит шаровые катки 50, выполненные с возможностью движения по направляющей.
Затем тело 20 щупа ориентируется роботом в выбранном направлении так, что выступ 34 входит в контакт с образующей линией полости 15, упругое средство смещения вступает в действие для обеспечения почти точечного контакта между выступом 34 и внутренней поверхностью полости, вдоль образующей линии, проходящей параллельно направлению движения стержня.
Как указано выше, робот, перемещающий и подвижное устройство 42, и стержень 22, несущий датчик, сам запрограммирован на ориентирование и перемещение тела 20 щупа по контуру торцевого отверстия полости. Каждое положение, которое определяется роботом, соответствует протягивающему ходу. Протягивающий ход в этом примере осуществляется самим роботом, который выполнен с возможностью перемещать щуп прямолинейными ходами, параллельными оси стержня 22. В альтернативном варианте, подвижное устройство может быть оснащено приводом, который выполняет это протягивающее движение.
Поперечный профиль полости запрограммирован в форме последовательных траекторий (протягивающих ходов) с помощью соответствующего числового управления роботом. Исследуемая деталь установлена на поворотный стол.
После калибровки стержень 22 приводит в контакт с прямолинейной зоной для контроля. Во время протягивающего хода щуп приводится в контакт с контролируемой поверхностью и движется параллельно продольной оси стержня, сканируя поверхность вдоль ее образующей линии. С учетом формы выступа 34 датчик может входить в полость без рывков, и форма рампы 30 позволяет избежать этапов ускорения и торможения. Это обеспечивает то, что контакт между чувствительным элементом (датчиком 24) и поверхностью создается постепенно, тем самым уменьшая краевые эффекты.
Сигнал, выдаваемый датчиком, фильтруют и выводят на экран. Изображение представляет собой проведенную проверку.
Устройство, описанное выше, может быть использовано на измерительной машине с числовым программным управлением, работающей в прямоугольной системе координат, или на любом другом автоматическом или ручном приборе, оснащенном соответствующими шифраторами.
Изобретение относится к неразрушающему контролю. Сущность: устройство содержит тело (20) щупа, содержащее датчик (24), установленный латерально рядом с концом стержня (22) и на одной линии с рампой (30), а также упругое средство смещения, воздействующее на тело щупа. Датчик (24) установлен по существу на вершине латерального выступа (34), имеющего криволинейную и симметричную поверхность, которая обеспечивает почти точечный контакт выступа с поверхностью полости. Рампа (30) образована участком выступа, расположенным между свободным концом стержня и датчиком. Технический результат: повышение надежности измерений за счет снижения вибраций и толчков. 10 з.п. ф-лы, 5 ил.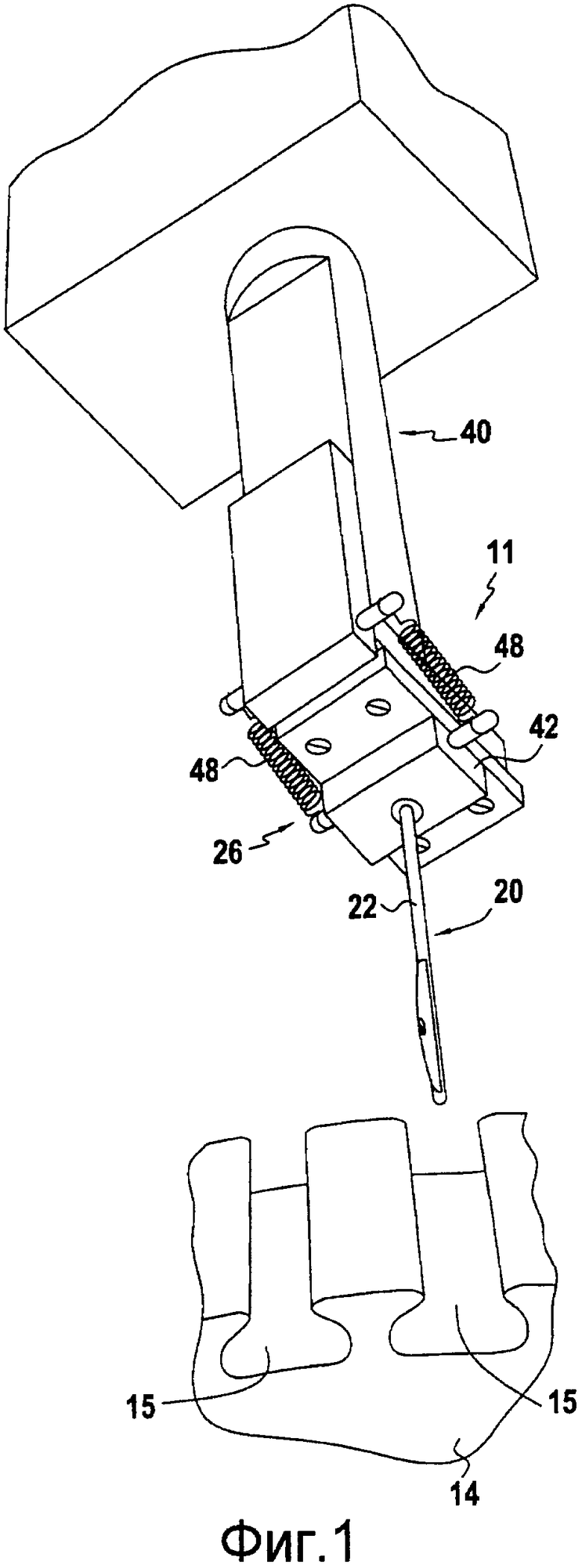
1. Устройство, использующее вихревые токи для неразрушающего контроля открытой прямоугольной полости, отличающееся тем, что содержит:
- тело (20) щупа, содержащее датчик (24) вихревых токов и стержень (22), при этом датчик установлен латерально рядом со свободным концом указанного стержня и на одной линии с рампой (30), отходящей от этого свободного конца, и
- упругое средство (26) смещения, воздействующее на тело щупа перпендикулярно относительно стержня, для прижимания тела щупа к контролируемой поверхности, при этом стержень перемещают для описания прямолинейных ходов вдоль его оси, последовательными протягивающими перемещениями, и тем, что датчик (24) установлен, по существу, на вершине латерального выступа (34), имеющего криволинейную и симметричную поверхность, которая обеспечивает почти точечный контакт выступа с поверхностью полости, при этом рампа (30) образована участком выступа, расположенным между свободным концом стержня и датчиком.
2. Устройство по п.1, отличающееся тем, что стержень выполнен жестким, и его движение перпендикулярно траектории протягивания создается упругим средством смещения.
3. Устройство по п.1 или 2, отличающееся тем, что латеральный выступ (34) выполнен из полимера.
4. Устройство по п.1, отличающееся тем, что датчик (24) относится к дифференциальному типу, имеющему две соседние катушки.
5. Устройство по п.4, отличающееся тем, что две катушки (24а, 24b) установлены симметрично относительно плоскости.
6. Устройство по п.5, отличающееся тем, что плоскость образует угол с прямолинейным рабочим ходом стержня (20).
7. Устройство по п.6, отличающееся тем, что угол, по существу, равен 45°.
8. Устройство по п.1, отличающееся тем, что упругое средство (26) смещения содержит подвижное устройство (42), несущее тело щупа, тем, что подвижное устройство установлено с возможностью скольжения по направляющей (46), перпендикулярной указанному стержню, и тем, что между направляющей и подвижным устройством установлены пружины (48).
9. Устройство по п.8, отличающееся тем, что подвижное устройство содержит шаровые катки (50), выполненные с возможностью движения по направляющей.
10. Устройство по п.1, отличающееся тем, что дополнительно содержит робот (40), запрограммированный на перемещение тела щупа по контуру отверстия (18) полости.
11. Устройство по п.10, отличающееся тем, что робот также запрограммирован на перемещение тела щупа (20) вышеуказанными прямолинейными ходами.
| ТОКОВИХРЕВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2216729C1 |
| ВИХРЕТОКОВЫЙ ДАТЧИК ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МЕТАЛЛИЗАЦИИ ОТВЕРСТИЙ И ТРУБОК И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 1993 |
|
RU2040788C1 |
| US 6972561 B2, 06.12.2005 | |||
| US 20060017434 A1, 26.01.2006. | |||

