Изобретение относится к беспилотным, в том числе бронированным, оснащенным вооружением, малогабаритным, преимущественно дистанционно управляемым (телеуправляемым), наземным транспортным средствам и предназначено для осуществления военных или полицейских задач.
Известен дистанционно управляемый мобильный робот по патенту RU2473863, содержащий бронированный корпус из керамических пластин с поворотной башенной установкой, ходовую систему с электромоторами-колесами, аккумуляторную систему, дизель-генератор или двигатель внутреннего сгорания, панорамно расположенные на корпусе и на башне видеокамеры, звукоприемную систему самонаведения, блоки управления. Ходовая система содержит телескопические стойки электромоторов-колес, содержащие электромоторы.
Известен робот по патенту RU 2274543, выбранный в качестве прототипа, содержащий размещенные в корпусе устройства для перемещения робота блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, соединенные посредством информационных каналов с блоком управления, и источник питания. Блок наблюдения за пространством перед роботом подключен к видеокамере наблюдения. Робот имеет перемещающееся средство с размещенными на нем станцией мобильной связи. Устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством. Блок обнаружения препятствия снабжен установленными на корпусе самодвижущейся тележки передатчиком и приемником ультразвукового сигнала.
Общим недостатком известных роботов является низкая проходимость и маневренность. Невозможна работа мобильных роботов в перевернутом состоянии и ограниченном пространстве.
Техническим результатом настоящего изобретения является повышение проходимости и маневренности мобильного робота. Кроме того, обеспечивается возможность движения и работы в перевернутом состоянии.
Технический результат достигается в мобильном роботе, содержащем корпус с блоком управления и источником питания, опорно-двигательные устройства, каждое из которых выполнено в виде поворотного рычага с полым валом, на плечах поворотного рычага на осях установлены колесные пары, поворотный рычаг и колесные пары оснащены приводами, выполненными с возможностью раздельного действия. Колесные пары могут быть оснащены гусеничной лентой, колеса выполнены с зацепами. Мобильный робот содержит четрые опорно-двигательных устройства, расположенных по углам прямоугольного корупуса, диаметр колесных пар превышает высоту корпуса. Привод поворотного рычага включает электродвигатель с редуктором, соединенный с полым валом; привод колесной пары включает электродвигатель, соединенный с валом, установленным в полом валу, вал соединен с осями колесных пар; указанные соединения выполнены в виде цепных или ременных или зубчатых передач. Используются асинхронные электродвигатели. В корпусе на выдвигающихся модулях установлены видеокамеры, обеспечивающие четырехсторонний обзор, микрофоны, вооружение. Мобильный робот выполнен с возможностью удаленного управления.
Изобретение поясняется чертежами:
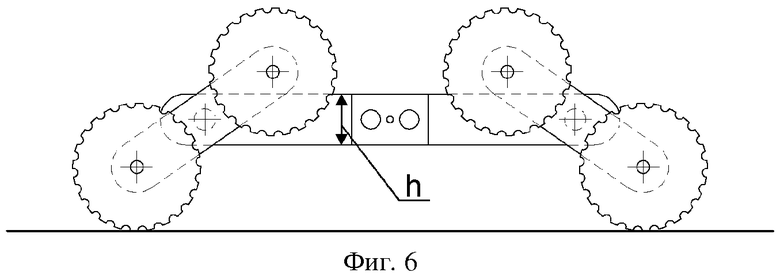
Фиг.1 - мобильный робот с гусеничными лентами;
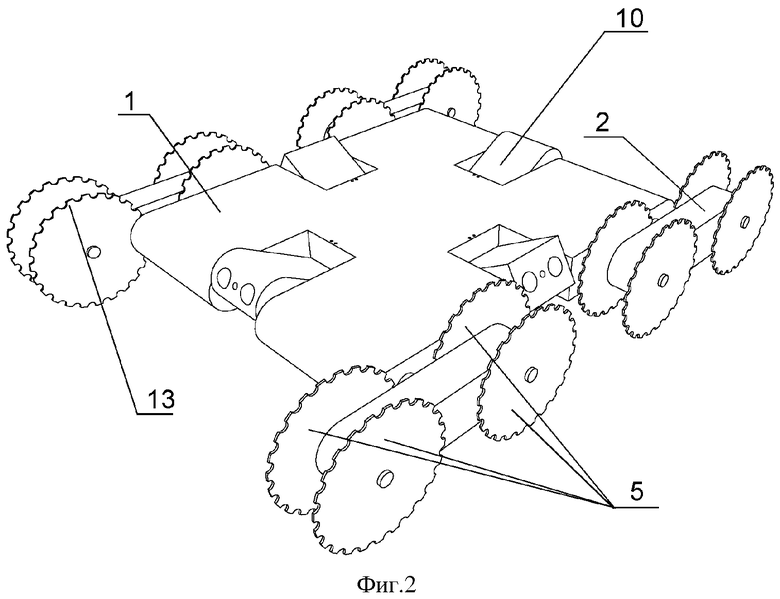
Фиг.2 - мобильный робот с поворотными выдвигающимися модулями;
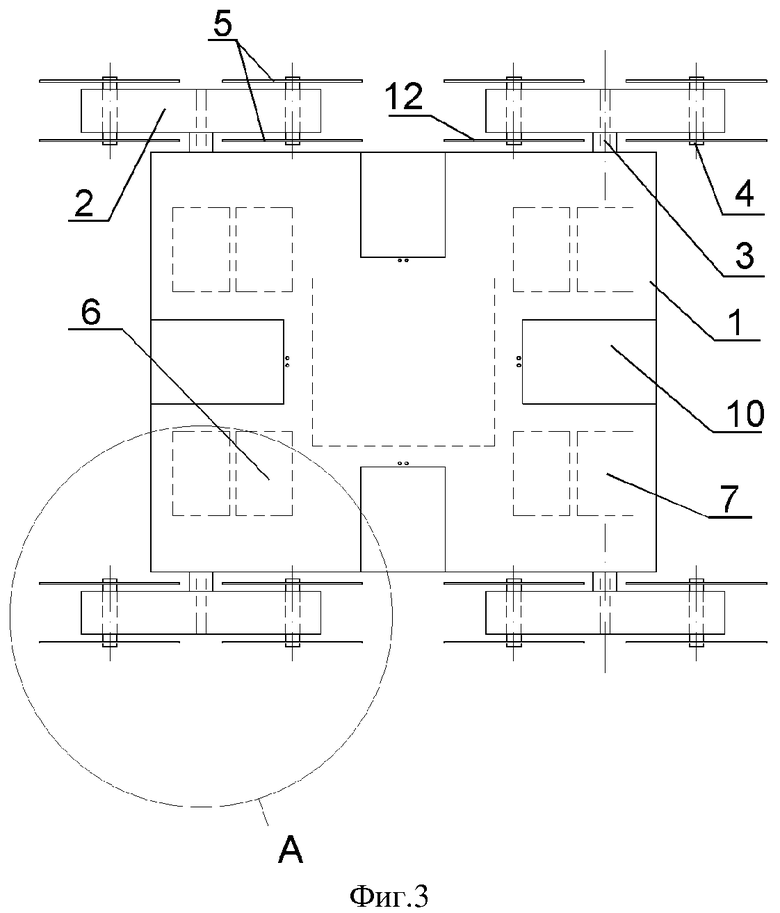
Фиг.3-мобильный робот, вид сверху;
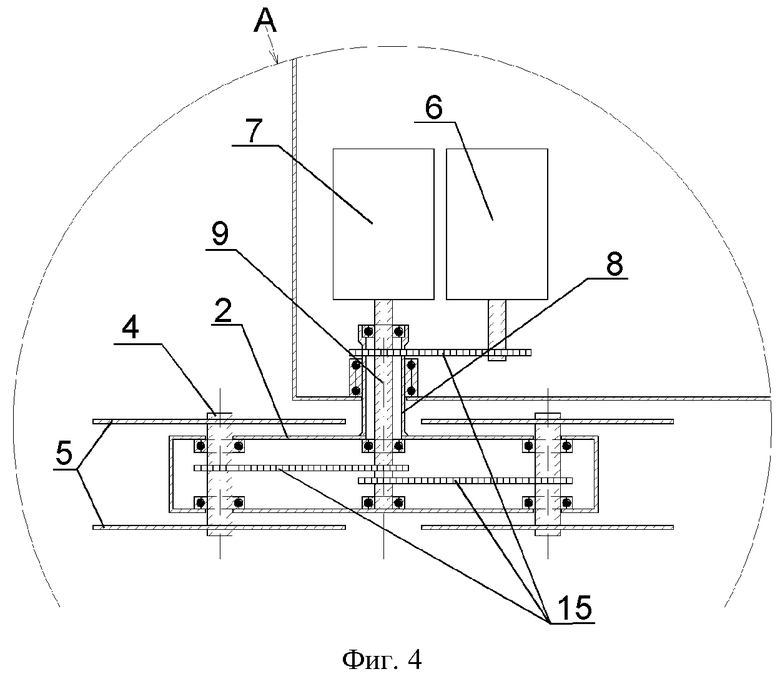
Фиг.4 - устройство приводов колесных пар и поворотного рычага;
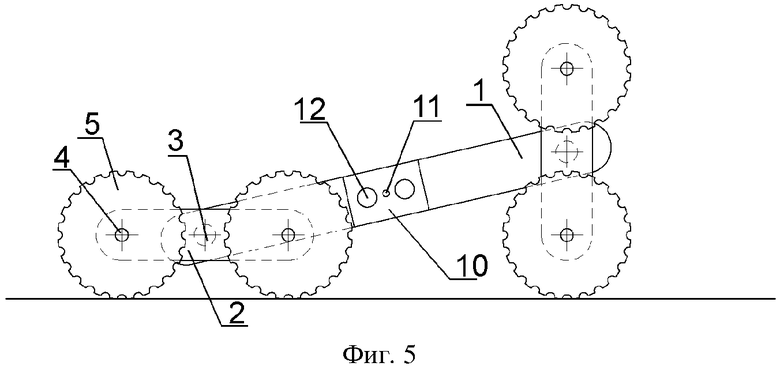
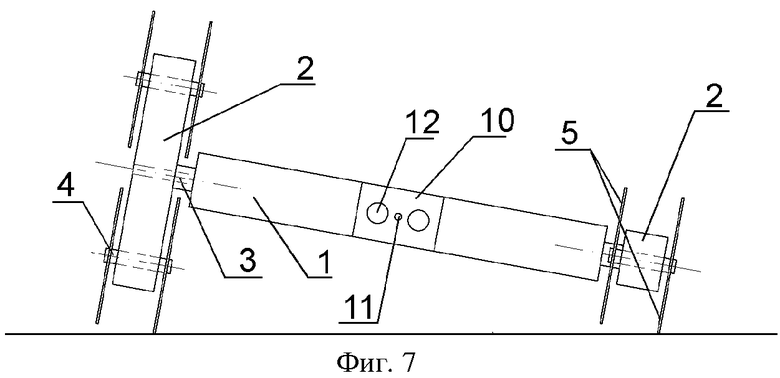
Фиг.5-7 - возможные положения опорно-двигательных устройств (фиг.7 - вид спереди).
Мобильный робот содержит плоский корпус 1 (металлический, пластиковый, углепластиковый) без выступающих частей, в котором установлены блок управления и источник питания (не показаны), электродвигатели 6, 7 с редукторами. Корпус 1 выполняется преимущественно в виде объемной фигуры, близкой к параллелепипеду, со скругленными ребрами и углами.
Шасси выполнено в виде опорно-двигательных устройств, каждое из которых выполнено в виде полого поворотного рычага 2 с полым валом 3. На плечах поворотного рычага 2 на осях 4 установлены колесные пары 5.
Колесные пары могут быть оснащены гусеничной лентой 14 (фиг.1), для этого колеса 12 выполнены с зацепами 13.
Мобильный робот, выполненный с прямоугольным корпусом (как показано на фиг.3), содержит четрые опорно-двигательных устройства, расположенных по углам корупуса 1.
В случае, если диаметр колесных пар 5 превышает высоту h корпуса (фиг.5, 6), мобильный робот имеет возможность двигаться и работать при двух положениях (состояниях) корпуса: прямом и перевернутом. Под высотой h корпуса 1 понимается максимальный размер корпуса по вертикали. Длина полого рычага 2 и диаметра колес 12 колесных пар 5 определяет клиренс и угол наклона корпуса 1 при поворотах полого рычага 2 (фиг.7).
Поворотный рычаг 2 и колесные пары 5 оснащены приводами (фиг.4), выполненными с возможностью раздельного действия. Так, привод поворотного рычага 2 включает электродвигатель 6, соединенный с полым валом 8. Привод колесной пары 5 включает электродвигатель 7, соединенный с валом 9, установленным в полом валу 8. Вал 9 соединен с осями 4 колесных пар 5. Соединения в приводах выполнены с использованием ременных или клино-ременных или цепных или зубчатых передач 15. В случае выполнения зубчатых передач 15, они могут выполнять функцию редукторов.
В качестве электродвигателей 6, 7 исползуются асинхронные электродвигатели, которые обеспечивают вращение приводов в обоих направлениях. Благодаря этому повышается маневренность и упрощается устройство привода.
В корпусе 1 на выдвигающихся модулях 10 установлены камеры 11, обеспечивающие четырехсторонний обзор, микрофоны (не показаны), вооружение 12. Для обеспечения четырехстороннего обзора выдвигающиеся модули могут быть установлены на каждой боковой грани корпуса 1.
Выдвигающиеся модули 10 обеспечивают работу и движение мобильного робота в прямом и перевернутом состоянии, для этого они могу быть выполнены поворотными (поворот вокруг горизонтальной оси, закрепленной в корпусе, на фиг.1, 2 показаны варианты установки горизонтальной оси в выдвигающемся модуле 10).
Мобильный робот, как правило, выполняется с возможностью удаленного управления. Для этого он оснащается блоком приема-передачи информации, который может быть выполнен в виде отдельного блока, соединенного с блоком управления, или входит в состав блока управления и выполняется с возможностью беспроводного приема управляющих сигналов и передачи информации, полученной от камер (видимого, инфракрасного или иных диапазонов) и микрофонов.
Мобильный робот работает следующим образом.
Изображение с 4 камер 11 выводится на монитор пульта управления оператора, с которого поступают команды на движение и производство выстрелов. При движении по ровной поверхности используется приводы с электродвигателями 7 колесных пар. При движении по поверхности с препятствиями или лестничным маршам используются в том числе приводы поворотных рычагов 2 с электродвигателями 6 (мобильный робот шагает, фиг.5-6). При переворачивании мобильный робот может продолжить движение и работу с использованием выдвигающихся модулей. В случае переворачивания передаваемое оператору изображение не переворачивается (за счет работы программного обеспечения).
Благодаря малым габаритам, плоскому корупусу без выступающих частей и конструкции опорно-двигательных устройств мобильный робот способен проникать в помещения через дверные проемы и разломы в стенах, передвигаться по различным препятствиям и ступеням межэтажных лестничных маршей. Перед отправкой для выполнения поставленной задачи оператор снаряжает робота боевыми элементами в виде 40 мм гранат: (осколочно-фугасной, термо-барической, свето-шумовой, с нервно-паралитическим или слезоточивым газом или т.п.боевым элементом) в зависимости от поставленной задачи или конкретных условий (снаряжение может быть комбинированным).
Использование опорно-двигательных устройств с поворотными рычагами и двумя приводами, действующими независимо, повышает проходимость за счет возможности реализовать шагающую схему движения. Алгоритмы движения могут быть различные: вращение колесных пар, вращение поворотных рычагов, одновременное вращение колесных пар и поворотных рычагов, каждая колесная пара может двигаться самостоятельно или синхронно с другой колесной парой.
Используется стандартный 40-мм боеприпас. Выстрелы могут производятся с четырех сторон, нет необходимости полностью разворачиваться, угол наклона для выстрела регулируется за счет рычагов колесной пары путем подъема корпуса (любая из 4-х сторон может выставлять угол самостоятельно).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОГО ПЕРЕДВИЖЕНИЯ СМАРТФОНА ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2627555C2 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Роботизированный диагностический комплекс технической разведки | 2018 |
|
RU2709640C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
Изобретение относится к беспилотным, в том числе бронированным, оснащенным вооружением, малогабаритным, преимущественно дистанционно управляемым, наземным транспортным средствам, и предназначено для осуществления военных или полицейских задач. Мобильный робот содержит корпус с блоком управления и источником питания, опорно-двигательные устройства, каждое из которых выполнено в виде поворотного рычага с полым валом, на плечах поворотного рычага на осях установлены колесные пары, поворотный рычаг и колесные пары оснащены приводами, выполненными с возможностью раздельного действия. Колесные пары могут быть оснащены гусеничной лентой, колеса выполнены с зацепами. Робот содержит четыре опорно-двигательных устройства, расположенных по углам прямоугольного корупуса, диаметр колесных пар превышает высоту корпуса. Привод поворотного рычага включает электродвигатель c редуктором, соединенный с полым валом. Привод колесной пары включает электродвигатель, соединенный с валом, установленным в полом валу, вал соединен с осями колесных пар, указанные соединения выполнены в виде цепных или ременных передач. В качестве двигателей используются асинхронные электродвигатели. В корпусе на выдвигающихся модулях установлены видеокамеры, обеспечивающие четырехсторонний обзор, микрофоны и вооружение. Робот выполнен с возможностью удаленного управления. Достигается повышение проходимости и маневренности мобильного робота, а также возможность движения и работы в перевернутом состоянии. 6 з.п. ф-лы, 7 ил.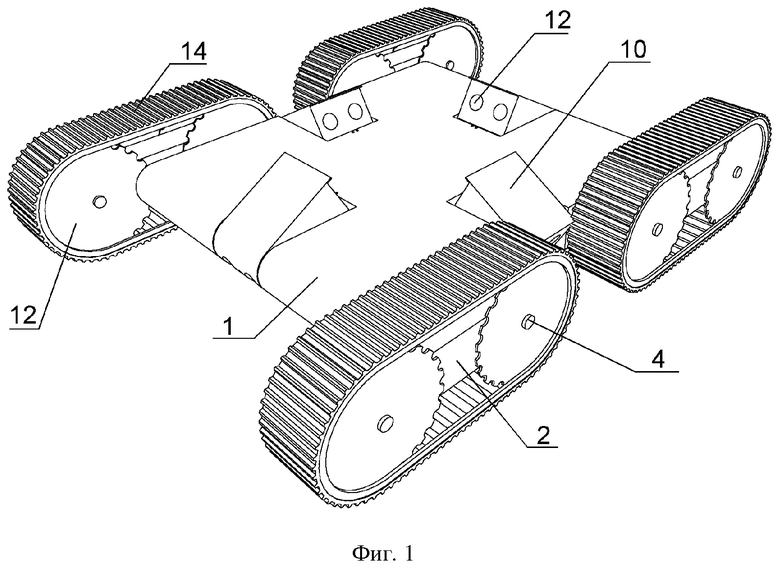
1. Мобильный робот, содержащий корпус с блоком управления и источником питания, опорно-двигательные устройства, каждое из которых выполнено в виде поворотного рычага с полым валом, на плечах поворотного рычага на осях установлены колесные пары, поворотный рычаг и колесные пары оснащены приводами, выполненными с возможностью раздельного действия.
2. Мобильный робот по п.1, характеризующийся тем, что колесные пары оснащены гусеничной лентой, колеса выполнены с зацепами.
3. Мобильный робот по п.1, характеризующийся тем, что содержит четыре опорно-двигательных устройства, расположенных по углам корупуса, диаметр колесных пар превышает высоту корпуса.
4. Мобильный робот по п.1, характеризующийся тем, что привод поворотного рычага включает электродвигатель, соединенный с полым валом; привод колесной пары включает электродвигатель, соединенный с валом, установленным в полом валу, вал соединен с осями колесных пар; указанные соединения выполнены в виде цепных, или ременных, или зубчатых передач.
5. Мобильный робот по п.4, характеризующийся тем, что используются асинхронные электродвигатели с редукторами.
6. Мобильный робот по п.1, характеризующийся тем, что в корпусе на выдвигающихся модулях установлены видеокамеры, обеспечивающие четырехсторонний обзор, микрофоны, вооружение.
7. Мобильный робот по п.1, характеризующийся тем, что выполнен с возможностью удаленного управления.
| МОБИЛЬНЫЙ РОБОТ | 2004 |
|
RU2274543C1 |
| Устройство для автоматического отбора проб половы и определения содержания в ней зерна | 1959 |
|
SU123753A1 |
| МОБИЛЬНЫЙ РОБОТ | 1991 |
|
RU2026227C1 |
| US 3747717 A, 24.07.1973 | |||
| КОЛЕСНО-ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2355597C1 |
| US 4932831 A, 12.06.1990 | |||
| CN 201711965 U, 19.01.2011 | |||

