Изобретение относится к лазерной технике и может быть использовано при оптической локации быстроперемещающихся объектов.
Известен способ лазерной локации, основанный на генерации модулированного лазерного излучения, приеме и обработке оптического сигнала, отраженного от подвижного объекта [1]. Данный способ локации позволяет измерять дальность до объекта. При этом информация о доплеровском смещении частоты излучения, по которому можно судить о скорости движения объекта, не используется и в рассматриваемом случае является источником ошибок при измерении дальности.
Известен также способ локации, в основу которого положено использование доплеровского эффекта для пеленгации и измерения радиальной скорости подвижного объекта (движущейся цели) [2]. Несмотря на многие преимущества указанного способа, такие как возможность обеспечения высокой чувствительности, его применение ограничивается, как правило, областью радиолокации. Ввиду затруднений, возникающих при обработке широкополосных сигналов, в лазерной локации данный способ не используется.
Наиболее близким к заявляемому способу является выбранный в качестве прототипа способ лазерной локации с непрерывным режимом работы лазера, основанный на приеме зондирующего излучения с последующим накоплением сигнала при когерентном детектировании [3].
Известный способ не предназначен для локации высокоскоростных целей, что является его недостатком. Другой недостаток известного способа заключается в отсутствии возможности селектировать подвижную цель, выделяя ее среди других целей по какому-либо признаку, например по дальности, по скорости или по угловым координатам.
Задачей изобретения является обеспечение селекции заданной цели при осуществлении локации нескольких целей, находящихся в поле зрения лазерного локатора, а также расширение диапазона измеряемых скоростей целей.
Поставленная задача решается тем, что в способе лазерной локации подвижной цели, основанном на генерации и приеме отраженного от цели лазерного излучения, интерференционной модуляции принятого излучения, на преобразовании его в электрический сигнал и последующей обработке, интерференционную модуляцию принятого излучения осуществляют путем его смешения с излучением лазерного источника, например лазерного гетеродина, преобразуют модулированные колебания в электрический сигнал и затем в цифровой код посредством квантования, производят спектральный анализ полученного цифрового сигнала, измеряют значение доплеровской скорости цели, селекцию цели осуществляют, сравнивая измеренное значение доплеровской скорости цели с заданным, рассчитанным по прогнозируемым данным, по результатам сравнения судят о наличии в пространстве цели с заданными параметрами, при этом рассчитывают доплеровскую скорость цели как функцию величины вектора относительной скорости цели и угла между названным вектором и линией визирования цели, уточняют значение искомой величины, учитывая результаты измерения доплеровских скоростей других целей, а также отклонение реальной траектории сближения с целью от прогнозируемой и значение выше названного угла на момент сближения с целью, осуществляют преобразование электрического сигнала в цифровой код посредством квантования сигнала с периодом, меньшим по сравнению с периодом модулированных колебаний.
Техническим результатом изобретения является повышение эффективности оптической локации и селекции высокоскоростных целей в условиях действия помех.
Сущность изобретения поясняется на примере реализации способа локации подвижной цели с осуществлением селекции цели по радиальной скорости, которую определяют по доплеровскому сдвигу частоты.
Схема, поясняющая предлагаемый способ локации и селекции целей, представлена на фиг.1. На фиг.2 представлена упрощенная схема устройства, с помощью которого возможно реализовать предлагаемый способ.
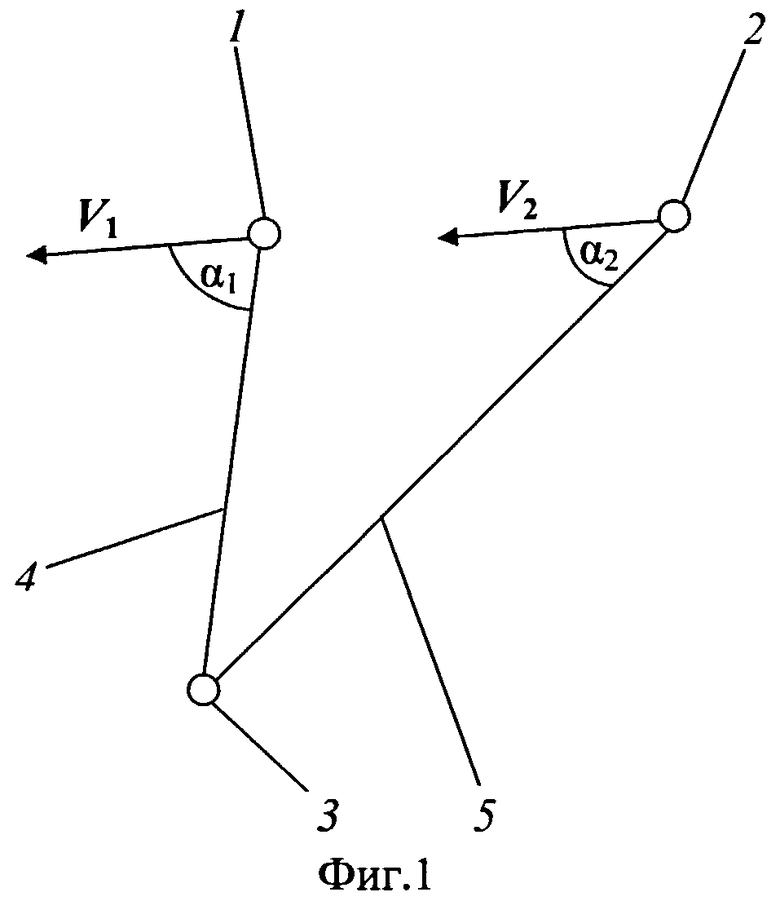
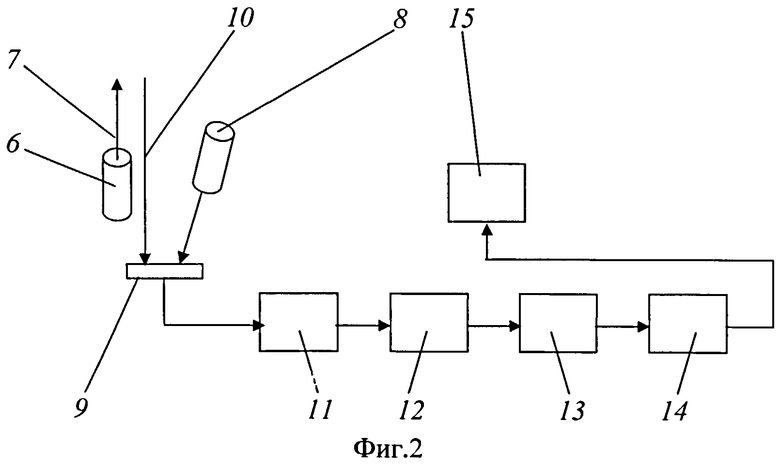
На фиг.1 показаны две цели 1, 2 и точка 3, в которой расположен локатор; обозначены векторы V1 и V2 относительной скорости целей, углы α1 и α2 между названными векторами скорости и соответствующими линиями визирования 4, 5. Согласно чертежу, представленному на фиг.2, устройство для осуществления способа содержит лазер 6, служащий источником излучения 7, лазерный гетеродин 8, оптически связанный с фотоприемником (ФП) 9 излучения 10 от целей, подключенный к ФП 9 согласующий усилитель 11, который через фильтр 12 связан с аналого-цифровым преобразователем (АЦП) 13, к выходу которого подключен спектроанализатор (СА) 14, соединенный с вычислителем 15.
Локация и селекция цели осуществляется следующим образом.
Как следует из чертежа, приведенного на фиг.1, даже при равных значениях скоростей V1 и V2 целей 1 и 2, локацию которых осуществляют из точки 3, значения углов α1 и α2 будут различаться. Соответственно значения доплеровских скоростей, названных целей также будут различны. Как известно [2], доплеровская скорость объекта (цели) прямо пропорциональна радиальной скорости его движения.
В процессе локации генерируемое с помощью лазера 6 излучение 7 направляют в сторону целей 1, 2. Принимают отраженное от целей лазерное излучение 10 и фокусируют его на ФП 9, на который также направляют излучение от лазерного гетеродина 8. В результате интерференции излучений отраженного от цели и лазерного гетеродина возникают колебания. При их детектировании с последующим преобразованием получают электрический сигнал, модулированный колебаниями разностной частоты. Сигнал подают через согласующий усилитель 11 и частотный фильтр 12 на АЦП 13, где осуществляют путем дискретизации и квантования преобразование сигнала в цифровой код. Оцифрованный сигнал подают на СА 14. И таким образом получают частотный спектр отраженного от целей сигнала. Сигнал, отраженный от цели, содержит гармоническую составляющую, которой на графике амплитудного спектра будет соответствовать пик (максимум), превышающий по уровню шум. Если в обозреваемом пространстве находится несколько целей, спектр анализируемого сигнала будет содержать несколько максимумов. По положению максимумов на оси частот спектра определяют значение частот, которое пересчитывают в вычислителе 15 в значение доплеровских скоростей целей. Сравнивают полученные значения скоростей с заданным для цели, рассчитанным заранее, и в соответствии с выбранным критерием принимают решение об обнаружении заданной цели. Диапазон анализируемых частот выбирают, в соответствии с прогнозируемой величиной доплеровской скорости целей. При сравнительно большом значении углов α1 и α2 величина доплеровской скорости, которую измеряют, будет существенно меньше действительной скорости цели. За счет этого достигается расширение диапазона измерений.
Для исключения ограничения по частоте, обусловленного рабочим диапазоном дискретных устройств, в первую очередь АЦП 13, преобразование снимаемого с ФП 9 электрического сигнала в названном устройстве осуществляют с периодом, большим по сравнению с периодом колебаний сигнала. Благодаря чему частотный спектр сигнала сдвигается влево по оси частот [4], следовательно, уменьшается максимальная частота оцифрованного сигнала. Это приводит к увеличению диапазона измеряемых доплеровских скоростей целей и расширяет возможности способа по осуществлению локации и селекции скоростных целей.
Уход частоты лазерного гетеродина 8 относительно частоты излучения лазера 6 корректируют, используя систему стабилизации частоты, аналогичную описанной в прототипе.
Уменьшение влияния ухода частоты лазера 6 достигается за счет уточнения расчетных данных по результатам измерения доплеровских скоростей других целей. Очевидно, сдвигу максимумов на графике амплитудного частотного спектра отраженного излучения на одно и то же значение соответствует изменение частоты излучения лазера 6, что учитывают при уточнении данных, используемых при селекции цели.
Таким образом устраняют помехи, обусловленные нестабильностью частоты излучения лазерных источников.
Возможно также уточнение расчетных данных по результатам траекторных измерений, осуществляемых в процессе сближения с целью.
При сравнительно низкой скорости относительного движения цели возможно использование в качестве источника гетеродинного излучения лазера 6 и отражающего элемента (на схеме не показан), который устанавливается вместо лазерного гетеродина 8, что позволяет направить часть излучения 7 на ФП 9.
Описанная выше совокупность признаков предлагаемого способа обеспечивает решение поставленной задачи, позволяет реализовать возможность локации и селекции заданной высокоскоростной цели в условиях действия помех, независимо от фоновой обстановки.
Как показали предварительные расчеты, а также моделирование процесса преобразования сигналов, предлагаемый способ позволяет достичь высокого разрешения при осуществлении селекции целей, в том числе и скоростных.
Благодаря высокой эффективности и сравнительной простоте реализации, способ может найти широкое практическое применение.
Источники информации
1. Петровский В.И., Пожидаев О.А. Локаторы на лазерах. - М.: Воениздат, 1969, с.54-81.
2. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975, с.84-85.
3. Лазерная локация / И.Н. Матвеев и др.; Под ред. Н.Д. Устинова. - М: Машиностроение, 1984, с.237-244 (прототип).
4. Лайонс Р. Цифровая обработка сигналов. Пер. с англ. - М.: ООО «Бином-Пресс», 2007, с.561-562.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования и обработки зондирующего лазерного сигнала | 2015 |
|
RU2616933C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ С ПОМОЩЬЮ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2022 |
|
RU2797148C1 |
| Способ определения местоположения метеорного тела | 2016 |
|
RU2627961C2 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| Способ обнаружения вибрирующих объектов, основанный на анализе интерференционной картины, получаемой с использованием лазерных локационных станций гетеродинного типа | 2022 |
|
RU2791818C1 |
| СПОСОБ ПАССИВНОЙ ЛОКАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2564995C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
Изобретение относится к лазерной технике и может быть использовано при оптической локации быстроперемещающихся объектов. Достигаемый технический результат - повышение эффективности оптической локации и селекции высокоскоростных целей в условиях действия помех. Сущность изобретения заключается в том, что в способе лазерной локации подвижной цели, основанном на генерации и приеме отраженного от цели лазерного излучения, интерференционной модуляции принятого излучения, на преобразовании его в электрический сигнал и последующей обработке сигнала, интерференционную модуляцию принятого излучения осуществляют путем его смешения с излучением лазерного источника, преобразуют модулированные колебания в электрический сигнал и затем в цифровой код посредством квантования, производят спектральный анализ полученного цифрового сигнала, измеряют значение доплеровской скорости цели, селекцию цели осуществляют, сравнивая измеренное значение доплеровской скорости цели с заданным, рассчитанным по прогнозируемым данным, по результатам сравнения судят о наличии в пространстве цели с заданными параметрами, при этом рассчитывая доплеровскую скорость цели, учитывают результаты измерения доплеровских скоростей других целей, а также отклонение реальной траектории сближения с целью от прогнозируемой, осуществляют преобразование электрического сигнала в цифровой код посредством квантования сигнала с периодом, меньшим по сравнению с периодом модулированных колебаний. 2 з.п. ф-лы, 2 ил.
1. Способ лазерной локации и селекции подвижной цели, основанный на генерации и приеме отраженного от цели лазерного излучения, интерференционной модуляции принятого излучения, на преобразовании его в электрический сигнал и последующей обработке сигнала, отличающийся тем, что интерференционную модуляцию принятого излучения осуществляют путем его смешения с излучением лазерного источника, например лазерного гетеродина, преобразуют модулированные колебания в электрический сигнал и затем в цифровой код посредством квантования, производят спектральный анализ полученного цифрового сигнала, измеряют значение доплеровской скорости цели, селекцию цели осуществляют, сравнивая измеренное значение доплеровской скорости цели с заданным, рассчитанным по прогнозируемым данным, по результатам сравнения судят о наличии в пространстве цели с заданными параметрами.
2. Способ по п.1, отличающийся тем, что, рассчитывая доплеровскую скорость цели как функцию величины вектора относительной скорости цели и угла между названным вектором и линией визирования цели, уточняют значение искомой величины, учитывая результаты измерения доплеровских скоростей других целей, а также отклонение реальной траектории сближения с целью от прогнозируемой и значение выше названного угла на момент сближения с целью.
3. Способ по п.1 или по 2, отличающийся тем, что преобразование электрического сигнала в цифровой код осуществляют посредством квантования сигнала с периодом, меньшим по сравнению с периодом модулированных колебаний.
| Лазерная локация | |||
| Под ред | |||
| УСТИНОВА Н.Д | |||
| Москва, Машиностроение, 1984, с.237-244 | |||
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| Машина для срезания излишков затяжной кромки на обуви с глухой затяжкой | 1956 |
|
SU105043A1 |
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| Печь кипящего слоя | 1987 |
|
SU1455199A1 |
| US 7804440 B1, 28.09.2010 | |||
| WO 1999017131 A2, 08.04.1999 | |||
| JP 2012122827 A, 28.06.2012 | |||

