Изобретение относится к автоматизированным системам контроля, а именно к устройствам обнаружения отказов и реагирования на них. Оно может быть использовано для контроля состояния бортового оборудования воздушных судов и выдачи экипажу рекомендаций по парированию возникших в полете особых ситуаций (ОС), связанных с отказами авиационной техники (AT).
Известна комплексная система информации о состоянии авиационной техники (СИС AT), которая устанавливается на воздушных судах (ВС) для решения задачи своевременной информации экипажа о техническом состоянии и об отказах в силовой установке и в бортовых системах [Воробьёв В.Г. и др. Техническое обслуживание и ремонт авиационных электросистем и пилотажно-навигационных комплексов. / В.Г.Воробьёв и др. - М.: МГТУ ГА /Университетская книга, 2007 - 472 с] [1].
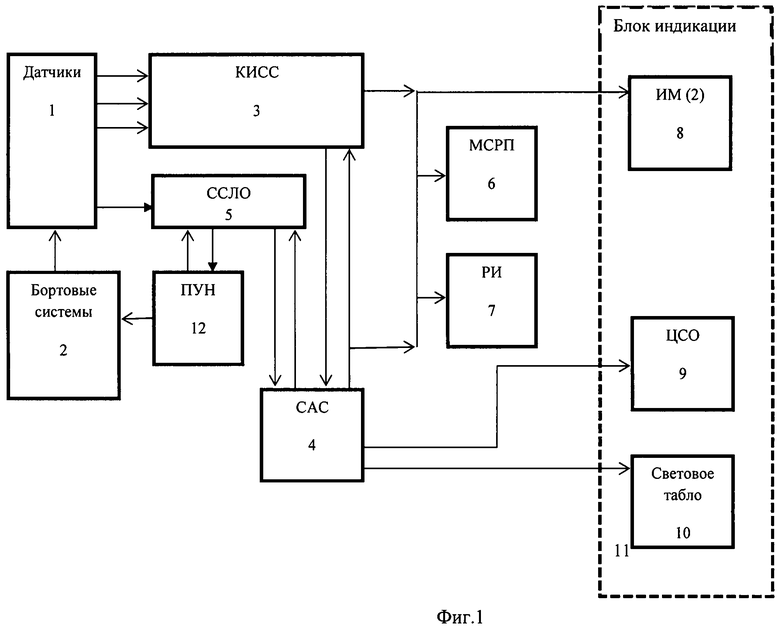
На фиг.1 изображена функциональная схема комплексной системы информации о состоянии авиационной техники (СИС AT), где приняты следующие обозначения:
1 - датчики технического состояния бортовых систем;
2 - бортовые системы;
3 - комплексная информационная система сигнализации КИСС;
4 - система аварийной, предупреждающей и уведомляющей сигнализации САС;
5 - система сигнализации и локализации отказов ССЛО;
6 - магнитная система регистрации параметров МСРП;
7 - речевой информатор РИ;
8 - экраны ИМ (многофункциональный индикатор);
9 - центральные световые огни ЦСО;
10 - световые табло;
11 - пульт управления индикацией ПУИ с вычислителем системы самолетовождения.
В упрощенном виде система СИС AT работает следующим образом.
С датчиков технического состояния бортовых систем 1 самолета сигналы контролируемых параметров поступают в информационные системы 3 (КИСС) и 5 (ССЛО). После соответствующей обработки сигналов формируется световая, текстовая, графическая и звуковая информация о техническом состоянии систем для экипажа и инженерно-технического персонала.
Первым уровнем контроля исправности бортовых изделий является система аварийной, предупреждающей, и уведомляющей сигнализации (САС) 4, обладающей высокой надежностью и оперативностью. Кроме того, при отказе КИСС 3 и ССЛО 5 она обеспечивает экипаж информацией об отказах и состояниях систем, влияющих на безопасность полета.
Комплексная информационная система сигнализации КИСС 3:
- предупреждает экипаж о возникновении опасных ситуаций с помощью световой, текстовой, графической и звуковой информации с блоков 7, 8, 9, 10;
- выдает информацию о текущих параметрах авиадвигателей и других бортовых систем самолета в виде графиков и текстов на многофункциональных индикаторах ИМ 8, где также отображается информация о появившихся отказах отдельных блоков или систем.
Информация об отказах и об опасных режимах работы систем через систему аварийной сигнализации СAC 4 обеспечивает включение световой и звуковой сигнализации с помощью блоков 7-10. Также эта информация регистрируется в системе сигнализации и локализации отказов ССЛО 5 и в магнитной системе регистрации параметров МСРП 6.
Недостатком известной системы СИС является то, что она способна лишь проинформировать о наличии отказа, не учитывая степени его опасности, а вся ответственность за правильное определение отказа, оценивание сложившейся особой ситуации и выбора варианта парирования полностью лежит на летчике, что значительно снижает безопасность полетов в условиях дефицита времени, например на этапах взлета или посадки самолета.
Очевидно, что один и тот же отказ будет иметь разную степень опасности на определенных стадиях взлета или посадки и, следовательно, различные варианты по парированию возникшей ОС, что также не предусмотрено системой СИС.
Техническим результатом предлагаемого устройства является возможность учета степени опасности отказов на определенных стадиях взлета или посадки самолета и выдача летчику информации в виде конкретного решения по парированию возникшей особой ситуации.
Технический результат достигается тем, что комплексная система информации и контроля состояния авиационной техники, содержащая датчики технического состояния объекта контроля, выходы которых подключены к комплексной информационной системе сигнализации КИСС, соединенной с магнитной системой регистрации параметров МСРП, и блок индикации, согласно изобретению дополнительно содержит соединенные последовательно счетчик импульсов, схему выбора номера канала, блок регистров и блок вычислений логических функций, причем на счетчик импульсов подключены канальный и кадровый импульсы от магнитной системы регистрации параметров, третий выход которой с помощью информационной шины соединен с четырьмя входами блока регистров, четыре других входа которого подключены к выходам устройства выбора номера канала, шесть входов которого соединены с соответствующими выходами счетчика импульсов, а четыре информационных входа блока вычисления логических функций с помощью информационной шины соединены с соответствующими выходами блока регистров, а пятый информационный вход шиной соединен со вторым информационным выходом датчиков технического состояния, а четыре выхода блока вычисления логических функций соединены с соответствующими входами блока индикации.
Изложенная сущность изобретения поясняется чертежом, где на фиг.2 изображена блок-схема заявляемого устройства. На чертеже приняты следующие обозначения:
1 - датчики технического состояния бортовых систем объекта контроля;
2 - комплексная информационная система сигнализации КИСС;
3 - магнитная система регистрации параметров МСРП;
4 - счетчик импульсов;
5 - устройство выбора номера канала;
6 - блок регистров;
7 - блок вычисления логических функций;
8 - блок индикации.
Датчики технического состояния бортовых систем представляют собой различного рода концевые выключатели, сигнализаторы, устройства сравнения и др. для реализации алгоритмов распознавания отказов AT и могут также быть использованы для распознавания этапов взлета или посадки.
Системы КИСС 2 и МСРП 3, а также блок индикации 8 подробно описаны в прототипе [1].
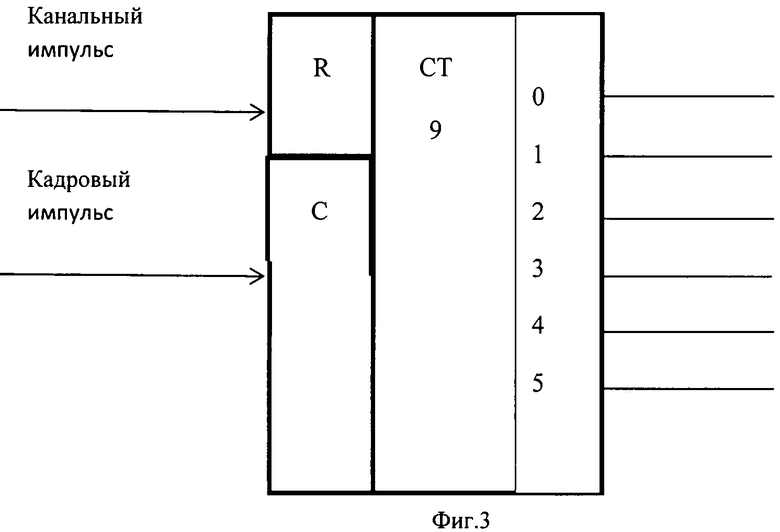
Счетчик импульсов 4 представлен блоком 9 с пояснениями на фиг 3.
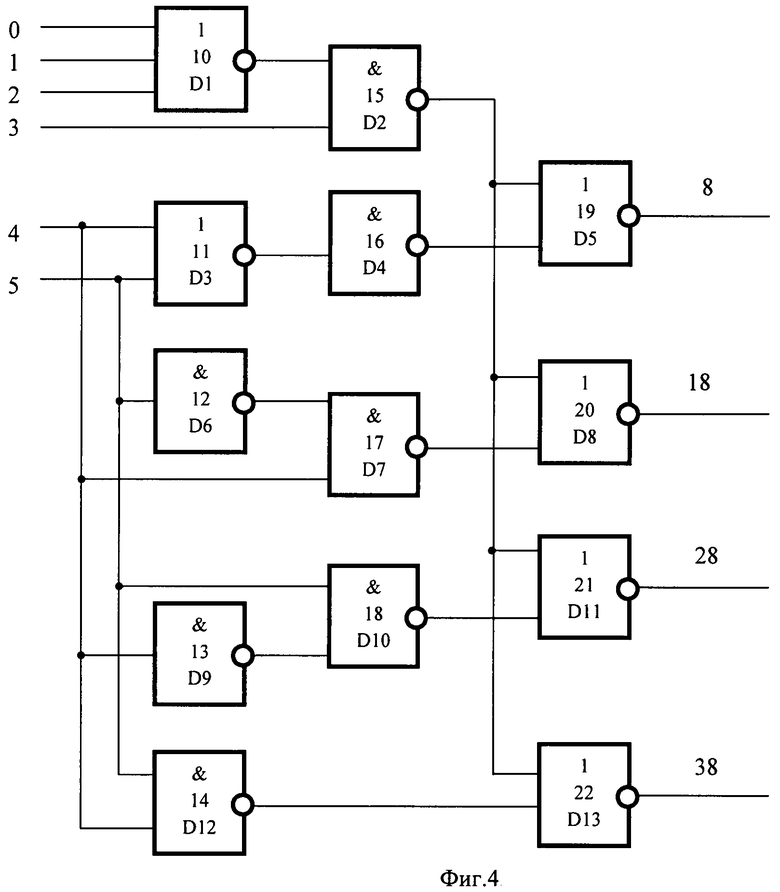
Блок-схема устройства выбора номера канала 5 изображена на фиг.4, где приняты следующие обозначения:
10 - D1 инвертор 3-ИЛИ-НЕ;.
11 - D3 инвертор 2-ИЛИ-НЕ;
12 - D6 инвертор НЕ;
13 - D9 инвертор НЕ;
14 - D12 инвертор 2-И-НЕ;
15 - D2 инвертор 2-И-НЕ;
16 - D4 инвертор НЕ;
17 - D7 инвертор 2-И-НЕ;
18 - D10 инвертор 2-И-НЕ;
19 - D5 инвертор 2-ИЛИ-НЕ;
20 - D8 инвертор 2-ИЛИ-НЕ;
21 - D11 инвертор 2- ИЛИ-НЕ;
22 - D13 инвертор 2-ИЛИ-НЕ.
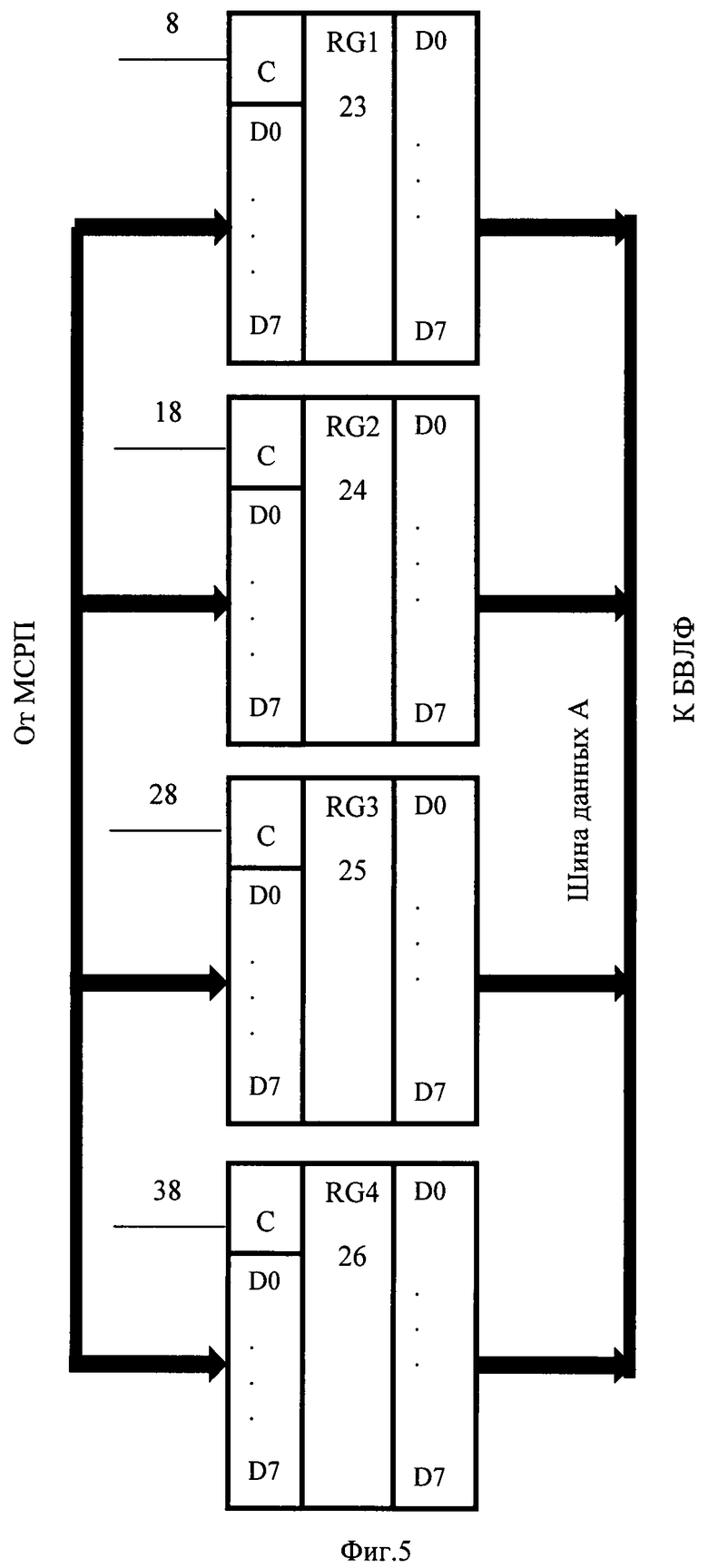
Блок регистров 6 изображен на фиг.5, где:
23 - регистр RG1;
24 - регистр RG2;
25 - регистр RG3;
26 - регистр RG4.
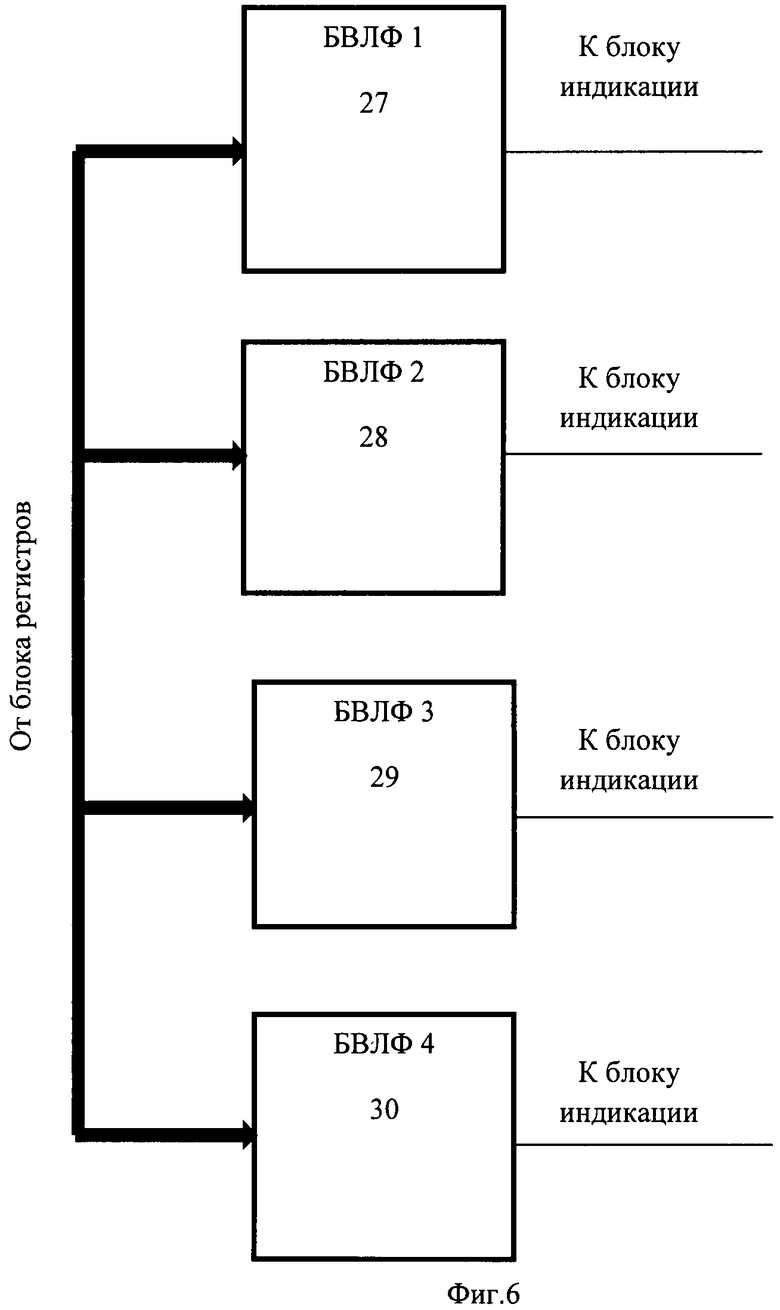
Блок вычисления логических функций 7 изображен на фиг.6. Он состоит из четырех одинаковых блоков под номерами 27, 28, 29, 30.
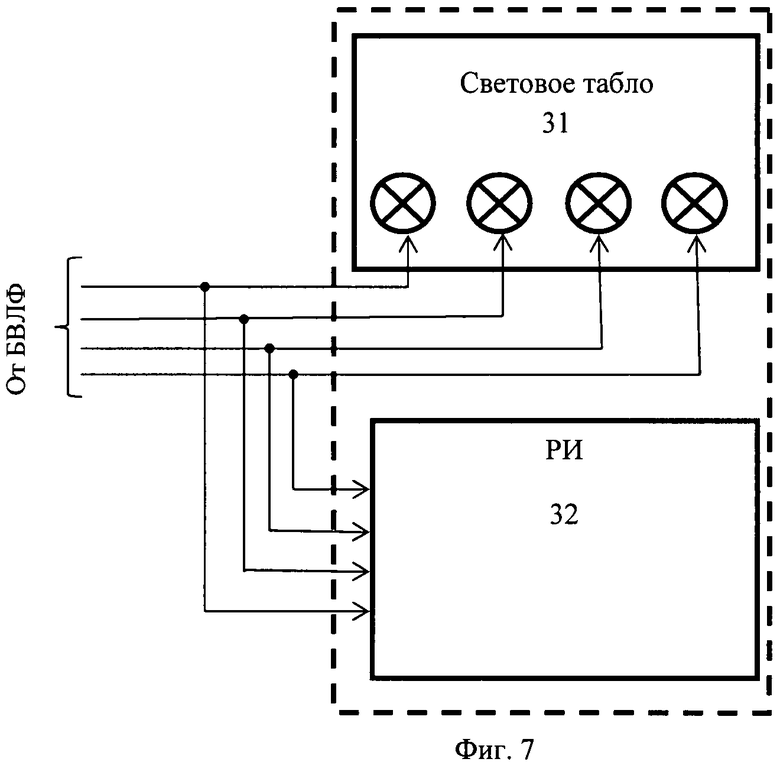
Блок индикацию 8 представлен на фиг.7 двумя блоками:
31 - светосигнальное табло с четырьмя лампами с обозначениями, например: «Продолжить взлет», «Прекратить взлет»; «Продолжить посадку», «Прекратить посадку».
32 - речевой информатор РИ.
Увеличение числа блоков вычисления логических функций позволяет детализировать требуемые действия экипажа по парированию ОС, т.е. увеличить число возможных вариантов локализации возникших ОС. Эти блоки просты в исполнении, малогабаритны и достаточно надежны.
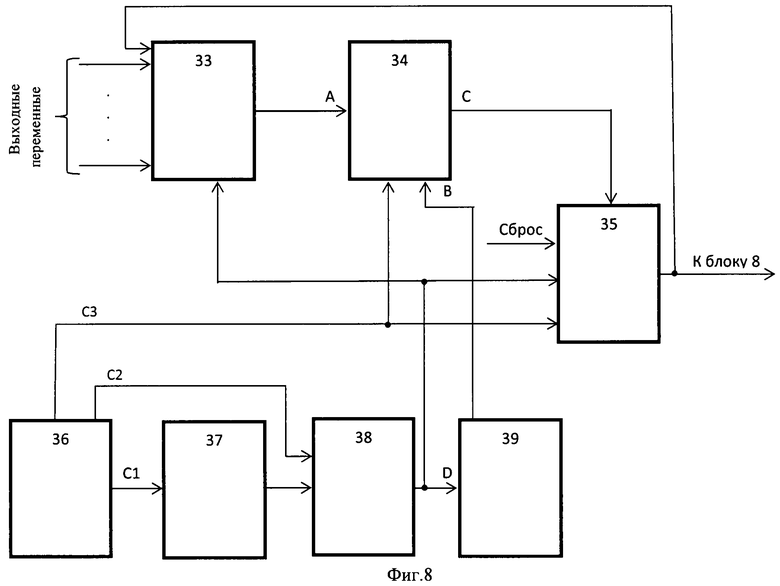
Один из одинаковых блоков вычисления, логических функций 27 (или 28, 29, 30) в развернутом виде согласно а.с. №1367011 изображен на фиг.8, где приняты следующие обозначения:
33 - коммутатор;
34 - блок вычислений;
35 - регистр;
36 - генератор импульсов;
37 - счетчик;
38 - блок памяти;;
39 - дешифратор.
Бортовое устройство регистрации параметров МСРП 3 имеет несколько различных модификаций и предназначено для записи на магнитную ленту основных параметров полета самолета и работы его двигателей, систем и оборудования с обеспечением сохранности записанной информации для определения причин летных происшествий.
В МСРП 3 сигналы от датчиков аналоговых параметров (например, скорость и высота полета) преобразуются в восьмиразрядный код, сформированный на регистре преобразования магнитной системы регистрации. Далее этот код через формирователи выходных сигналов поступает на блоки магнитных головок накопителей и записывается на магнитной ленте МСРП 3.
Сигналы от датчиков разовых команд (например, срабатывание аварийной сигнализации и сигналы об отказах) формируются по группам (4 группы по 8 разовых команд) и также поступают на регистр преобразования МСРП 3. Кроме этого в систему МСРП 3 записываются в качестве разовых команд наиболее опасные отказы, возникающие на борту ВС. Каждая разовая команда может принимать значение 0 или 1.
Запись разовых команд на магнитную ленту осуществляется по 8-му, 24-му, 40-му и 56-му каналам. В шестнадцатиричной системе исчисления это 8h, 18h, 28h и 38h каналы.
Информация об отказах и об опасных режимах работы систем поступает от датчиков технического состояния систем в КИСС 2 и далее наиболее опасные из них в магнитную, систему регистрации параметров МСРП 3 и записывается на магнитную ленту в соответствующих разрядах 4-х групп разовых команд.
Параллельно с записью на магнитную ленту выходной сигнал МСРП 3 из его регистра преобразования поступает на вход блока регистров 6, который состоит из четырех восьмиразрядных регистров RG 1-RG 4 под номерами 23, 24, 25 и 26. Эти регистры (RG 1-RG 4) предназначены для хранения информации, соответственно, 1-й - 4-й групп разовых команд. Выходы регистров 23, 24, 25, 26 сведены параллельно в 32-разрядную информационную шину А.
Каналы записи в регистре преобразования МСРП 3 включаются поочередно. Признаком записи канала является канальный импульс. При этом 64 канала образуют кадр. Признаком начала кадра является кадровый импульс.
Для определения номера выводимого канала канальный импульс подается на счетный вход C восьмиразрядного двоичного счетчика 4. Для сброса счетчика 4 на его вход R подается кадровый импульс.
Для выделения 8h, 18h, 28h и 38h каналов кадра и записи их в соответствующий регистр RG 1-RG 4 (под номером 23, 24, 25, 26) используется схема выбора номера канала 5, показанная на фиг.4.
В этом устройстве 5 инверторы D1 (10) 3-ИЛИ-НЕ и D2 (15) 2-И-НЕ формируют сигнал y1

Сигнал y1 равен 0 для каналов с номерами x4x58h.
При x4x5=00 на выходе инверторов D3(11) 2-ИЛИ-НЕ и D4(16) HE будет получен сигнал y2=x4+x5=0. В этом случае на выходе инвертора D5(19) 2-ИЛИ-НЕ будет получен сигнал 8 для записи 8 канала из регистра преобразования МСРП3 в регистр RG 1(23).
При x4x5=01 на выходе инверторов D6(12) HE и D7(17) 2-И-НЕ будет получен сигнал  . В этом случае на выходе инвертора D8(20) 2-ИЛИ-НЕ будет получен сигнал 18 для записи 18 канала из регистра преобразования МСРП в регистр RG 2(24).
. В этом случае на выходе инвертора D8(20) 2-ИЛИ-НЕ будет получен сигнал 18 для записи 18 канала из регистра преобразования МСРП в регистр RG 2(24).
При x4x5=10 на выходе инверторов D9(13) HE и D10(18) 2-И-НЕ будет получен сигнал  В этом случае на выходе инвертора D11 (21)2-ИЛИ-НЕ будет получен сигнал 28 для записи 28 канала из регистра преобразования МСРП3 в регистр RG 3(25).
В этом случае на выходе инвертора D11 (21)2-ИЛИ-НЕ будет получен сигнал 28 для записи 28 канала из регистра преобразования МСРП3 в регистр RG 3(25).
При x4x5=11 на выходе инвертора D12(14) 2-И-НЕ будет получен сигнал  . В этом случае на выходе инвертора D13(22) 2-ИЛИ-НЕ будет получен сигнал 38 для записи 38 канала из регистра преобразования МСРП 3 в регистр RG 4(26).
. В этом случае на выходе инвертора D13(22) 2-ИЛИ-НЕ будет получен сигнал 38 для записи 38 канала из регистра преобразования МСРП 3 в регистр RG 4(26).
Из блока регистров 6 сигнал с 32-разрядной информационной шины А поступает на блок вычисления логических функций 7.
Все элементы дополнительно введенных в заявляемое устройство блоков 4, 5, 6, 7 - стандартные и подробно описаны в литературе [Атаев Д.И. и др. Аналоговые интегральные микросхемы. / Д.И.Атаев и др. - М.: МЭИ, 1993. - 240 с.] [3] и [Справочник по микроэлектронной импульсной технике под ред. В.Н.Яковлева - Киев: Техника, 1983. - 359 с.] [4].
Информация поступает в виде речевых команд или загоранием ламп с соответствующим сообщением как подсказка экипажу о приоритетном выборе принятия решений по парированию особых ситуаций, вызванных отказами AT на определенном этапе взлета или посадки самолета. Выбор количества сообщений и методов их индикации является простой задачей и может быть скорректирована заказчиком и исполнителем.
Алгоритм решения поставленной задачи о выборе принятия решений по парированию особой ситуации представлен ниже.
Согласно данным статистики наибольшее число летных происшествий происходит на этапах взлета и посадки. Для взлета это объясняется скоротечностью данного этапа, большим объемом информации, поступающей летчику и, что является немаловажным, психофизиологическими возможностями человека, о чем свидетельствуют результаты экспериментов на тренажерах: вероятность парирования пассивных отказов AT на взлете составляет 0,3-0,5. Особые затруднения летчики испытывают на стадиях оценки обстановки и принятия решения.
Под особой ситуацией (ОС) будем понимать возникновение определенного отказа на определенной стадии полета и, в частности, взлета самолета.
Так как один и тот же отказ будет иметь разную степень опасности на определенных стадиях взлета или посадки и, следовательно, различные варианты по парированию возникшей ОС возникает необходимость реализации распознавания этих стадий и автоматизации процесса выбора варианта парирования ОС для каждой из них.
Таким образом алгоритм определения ОС будет состоять из алгоритмов распознавания стадий взлета и отказов техники. Отказы авиационной техники определяются бортовой автоматизированной системой контроля (КИСС), а наиболее опасные из них поступают от КИСС в МСРП.
Алгоритм распознавания стадий можно представить в следующем виде.
Весь взлет можно условно разбить на 5 стадий:
1. С1 - от начало взлета до подъема носовых колес;
2. С2 - от подъема носовых колес до отрыва;
3. С3 - от отрыва до уборки шасси;
4. С4 - от уборки шасси до уборки закрылков;
5. С5 - от уборки закрылков до отключения форсажа или до перехода в набор высоты, либо до достижения установленных значений V и H, когда взлет считается законченным.
Таким образом, признаками стадий взлета и логическими выражениями для них будут:
1. С1: а) обжатие всех колес (NΣ);
б) значение nx1>0, причем конкретное для данного типа и условий взлета;
в) 0<V1<Vнк, т.е. V1;
г) предыстория Co (Co характеризуется повышенным режимом работы двигателя (max или форсаж), резким расторможением колес и Vo≤V руления, т.е. Vo≅0).
C1=Co*(NΣ·nx1·V1).
2. C2: а) нет обжатия и колес (Nосн);
б) Vнк<V2<Vотр, т.e. (V2);
в) предыстория - C1*.
C2=C1 *(Nосн·V2).
3. С3: а) нет обжатия колес (N);
б) V3>Vотр.;
в) шасси выпущен (Ш);
г) предыстория - C2 *.
C3=C2 *(N·V3·Ш).
4. C4: а) шасси убраны (Ш);
б) 0<H4<100 м;
в) закрылки выпущены (3);
г) предыстория - C3 *.
C4=C3 *(Ш·H4·З)
5. С5: а) Н5>100 м;
б) закрылки убраны (З);
в) V3>400 км/ч;
г) предыстория - С4*.
C5=C4 *(H5·З·V5).
Весь этап посадки можно условно разбить также на пять стадий:
6. C1 - предпосадочное снижение;
7. C2 - выравнивание;
8. C3 - выдерживание;
9. C4 - парашютирование (если оно предусмотрено);
10. С5 - пробег.
Кроме того, Co - стадия, предшествующая посадке - снижение с высоты полета и подготовка к посадке.
Стадии взлета или посадки определяются для конкретного типа воздушного судна, класса взлетно-посадочной полосы и т.д. Признаки их определения также условны и могут быть изменены. Значительных изменений в предлагаемом устройстве не произойдет.
После решения этой задачи необходимо сделать следующий шаг - автоматизировать процесс выбора варианта парирования опасных ОС.
Для определения конкретного решения по парированию заданного отказа на определенной стадии взлета использовались методы экспертных оценок высококвалифицированных летчиков и методы математического моделирования, а результаты (решения) предлагается ввести в память предложенного устройства.
Таким образом, при определенном сочетании вида отказа и стадии взлета экипажу предлагается конкретное действие по парированию ОС.
Алгоритмы, реализующие распознавание отказов, этапов взлета и посадки, автоматизированный выбор принятия решений экипажем по парированию ОС, реализованы заявляемым устройством, изображенным на фиг.2. Предлагаемое устройство работает следующим образом.
Информация об отказах и об опасных режимах работы систем поступает от датчиков технического состояния систем в КИСС 2 и далее наиболее опасные из них в магнитную систему регистрации параметров МСРП 3 и записывается на магнитную ленту в соответствующих разрядах 4-х групп разовых команд.
Параллельно с записью на магнитную ленту выходной сигнал МСРП 3 из его регистра преобразования через счетчик импульсов 4, предназначенного для подсчета количества канальных импульсов, поступает на вход блока регистров 6, который состоит 1 из четырех восьмиразрядных регистров RG 1-RG 4 под номерами 23, 24, 25 и 26. Эти регистры (RG 1-RG 4) предназначены для хранения информации, соответственно, 1-й - 4-й групп разовых команд. Выходы регистров 23, 24, 25, 26 сведены параллельно в 32-разрядную информационную шину А.
Каналы записи в регистре преобразования МСРП 3 включаются поочередно. Признаком записи канала является канальный импульс. При этом 64 канала образуют кадр. Признаком начала кадра является кадровый импульс. Для определения номера выводимого канала канальный импульс подается на счетный вход C восьмиразрядного двоичного счетчика 4. Для сброса счетчика 4 на его вход R подается кадровый импульс. Для выделения 8h, 18h, 28h и 38h каналов кадра и записи их в соответствующий регистр RG 1-RG 4 (под номером 23, 24, 25, 26) используется схема выбора номера канала 5, показанная на фиг.4.
Из блока регистров 6 сигнал с 32-разрядной шины данных A поступает в блок вычисления и логических функций 7, состоящий из четырех однотипных блоков, где по данным о виде отказа из блока регистров 6 и информации от датчиков технического состояния бортовых систем 1 (различного рода сигнализаторов, концевых выключателей, устройств сравнения и др.), поступающим в виде признаков распознавания стадий взлета или посадки, реализуется алгоритм распознавания ОС и этот сигнал поступает на соответствующий вход блока индикации. Каждый блок вычисления логических функций 27, 28, 29, 30 предназначен для реализации распознавания конкретной ОС для выдачи рекомендаций экипажу по виду ее парирования.
Информация поступает в виде речевых команд или загоранием ламп с соответствующим сообщением как подсказка экипажу о приоритетном выборе принятия решений по парированию особых ситуаций, вызванных отказами AT на определенном этапе взлета или посадки самолета.
Таким образом, предложенное устройство позволяет не только определять отказы бортовых систем, но также распознавать стадии взлета или посадки и автоматизировать процесс выбора варианта парирования. Это в значительной степени позволяет снизить ошибочные действия экипажа по локализации особых ситуаций в условиях дефицита времени, особенно для таких этапов, как взлет или посадка.
Выбор простых схемных решений позволяет без значительных затрат установить данное устройство на любых типах воздушных судов, а выбор количества сообщений и методов их индикации могут быть скорректированы заказчиком и исполнителем путем дополнительного введения блоков вычисления логических функций, каналов речевых информаторов и (или) ламп сигнализации световых табло.
Источники информации
1. Воробьёв В.Г. и др. Техническое обслуживание и ремонт авиационных электросистем и пилотажно-навигационных комплексов. / В.Г.Воробьёв и др. - М.: МГТУ ГА Университетская книга, 2007 - 472 с.
2. Устройство вычисления логических функций. А.С. №2367011, G01F 7/00, заявлен 10.02.86 г, опубл. 15.01.88 г.
3. Атаев Д.И. и др. Аналоговые интегральные микросхемы. / Д.И.Атаев и др. - М.: МЭИ, 1993. - 240 с.
4. Справочник по микроэлектронной импульсной технике под ред. В.Н.Яковлева - Киев: Техника, 1983. - 359 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| Устройство для вычисления логических функций | 1986 |
|
SU1367011A1 |
| СИСТЕМА КОНТРОЛЯ ПРОЧНОСТНЫХ СВОЙСТВ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2348916C1 |
| УСТРОЙСТВО ДЛЯ СБОРА, РЕГИСТРАЦИИ И СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2115163C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КАЧЕСТВА ПИЛОТИРОВАНИЯ САМОЛЕТА ЛЕТЧИКОМ | 1998 |
|
RU2136046C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЭЛЕКТРОННОЙ ИНДИКАЦИИ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2219108C1 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
Изобретение относится к автоматизированным системам контроля состояния бортового оборудования воздушных судов и выдачи экипажу рекомендаций по парированию возникших в полете особых ситуаций. Техническим результатом является снижение ошибочных действий экипажа. Устройство включает в себя датчики технического состояния объекта контроля, три выхода которых подключены к комплексной информационной системе сигнализации, соединенной с магнитной системой регистрации параметров, и блок индикации. Устройство дополнительно содержит соединенные последовательно счетчик импульсов, устройство выбора номера каналов, блок регистров и блок вычисления логических функций, причем на счетчик импульсов подключены канальный и кадровый импульсы от магнитной системы регистрации параметров, третий выход которой с помощью информационной шины соединен с четырьмя входами блока регистров, четыре других входа которого подключены к выходам устройства выбора номера канала, шесть входов которого соединены с соответствующими выходами счетчика импульсов, а четыре информационных входа блока вычисления логических функций с помощью информационной шины соединены с соответствующими выходами блока регистров, а пятый информационный вход шиной соединен со вторым информационным выходом датчиков технического состояния, а четыре выхода блока вычисления логических функций соединены с соответствующими входами блока индикации. 8 ил.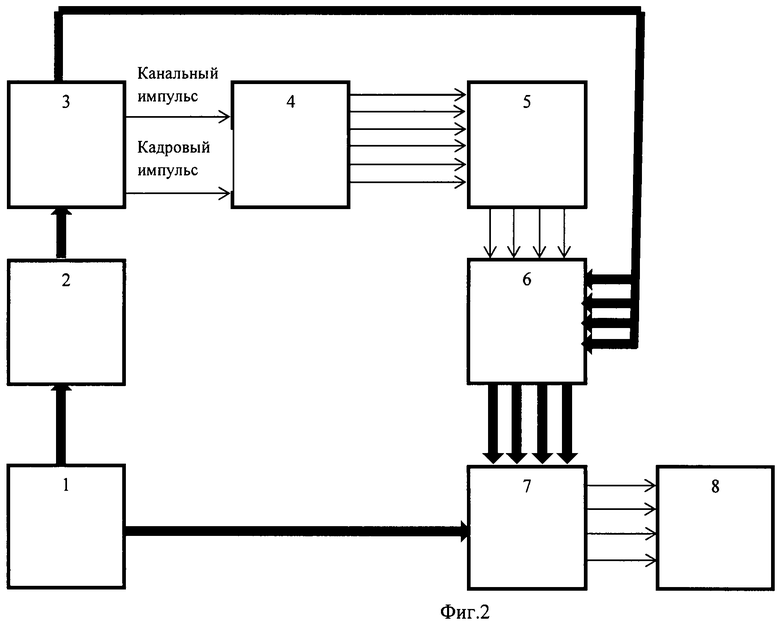
Комплексная система информации и контроля состояния авиационной техники, содержащая датчики технического состояния объекта контроля, три выхода которых подключены к комплексной информационной системе сигнализации, соединенной с магнитной системой регистрации параметров, и блок индикации, отличающаяся тем, что в нее дополнительно введены соединенные последовательно счетчик импульсов, устройство выбора номера каналов, блок регистров и блок вычислений логических функций, причем на счетчик импульсов подключены канальный и кадровый импульсы от магнитной системы регистрации параметров, третий выход которой с помощью информационной шины соединен с четырьмя входами блока регистров, четыре других входа которого подключены к выходам устройства выбора номера канала, шесть входов которого соединены с соответствующими выходами счетчика импульсов, а четыре информационных входа блока вычисления логических функций с помощью информационной шины соединены с соответствующими выходами блока регистров, а пятый информационный вход шиной соединен со вторым информационным выходом датчиков технического состояния, а четыре выхода блока вычисления логических функций соединены с соответствующими входами блока индикации.
| СПОСОБ ОЧИСТКИ ВЕНТИЛЯЦИОННЫХ ВЫБРОСОВ ОТ | 0 |
|
SU241395A1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| СИСТЕМА СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2313827C1 |
| US 20030058135 A1, 27.03.2003. | |||

