Предлагаемое изобретение относится к авиации, в частности к способам защиты авиационных двигателей от попадания в них посторонних предметов (ПП), забрасываемых с поверхности взлетно-посадочной полосы (ВПП) вихревыми шнурами (концентрированными вихрями), образующимися между поверхностью ВПП и воздухозаборниками маршевых авиадвигателей (от вихревого засасывания ПП) на разбеге самолета при взлете.
Средства защиты маршевых авиадвигателей самолетов от вихревого засасывания ПП весьма разнообразны. Например, можно упомянуть струйную систему защиты двигателя от вихревого засасывания в него ПП посредством разрушения вихревого шнура струей воздуха, отбираемого от компрессора авиадвигателя (патент на изобретение №1824826, МПК B64D 33/02, опубликовано 10.08.1991). В числе конструктивных средств защиты авиадвигателей от вихревого засасывания ПП можно отметить компоновочные решения по размещению маршевых авиадвигателей на самолете. Двигатели устанавливаются достаточно высоко над поверхностью ВПП, минимизируется загромождение верхних полусфер входов в воздухозаборники авиадвигателей. То и другое ослабляет вихревые шнуры и снижает вероятность вихревого засасывания ими в двигатели ПП.
Необходимость соблюдения ограничений на взлетно-посадочные характеристики самолета по условию обеспечения безопасности полетов ставит под серьезное сомнение эффективность снижения вероятности вихревого засасывания ПП путем простого снижения режима работы авиадвигателей на постоянную величину. Предпочтительнее, оказывается, изменять режим маршевых авиадвигателей в процессе движения самолета по ВПП в зависимости от изменения тех или иных условий этого движения. В этом плане можно упомянуть способ применения реверса тяги на послепосадочном пробеге самолета, при котором режим работы силовой установки понижается в зависимости от уменьшения скорости движения самолета. В этом случае авиадвигатели защищаются от попадания ПП, поднимаемых с поверхности ВПП реверсивными струями горячих газов, и от попадания самих струй, способных нарушать газодинамическую устойчивость (ГДУ) двигателей. Реализация такого способа требует применения программной системы автоматического регулирования, включающей в себя в обязательном порядке датчик скорости движения самолета, датчик частоты вращения роторов авиадвигателя, датчик температуры (торможения) наружного воздуха и программное устройство, воспроизводящее зависимость приведенной (по температуре) частоты вращения от числа М (скорости, приведенной по температуре) движения самолета по ВПП.
Более простой обходной прием состоит в том, что вместо программной системы используют так называемую замкнутую систему автоматического регулирования. Отрицательная обратная связь замыкается через объект регулирования. Для этого измеряется какой-либо параметр, косвенно характеризующий режим работы регулируемого двигателя. Этот параметр сравнивается с заданным его значением. По результату сравнения формируется управляющий сигнал, подаваемый на исполнительный механизм, который изменяет режим работы двигателя в сторону уменьшения рассогласования между заданным и измеряемым значениями параметра, характеризующего режим работы двигателя. При этом вместо скорости движения самолета и частоты вращения роторов в системе регулирования авиадвигателя должно быть предусмотрено измерение местной температуры (торможения) на входе в воздухозаборник маршевого авиадвигателя (измеряемое значение), которая возрастает при попадании реверсивной струи на вход в воздухозаборник, и температуры (торможения) невозмущенного потока воздуха (заданное значение). Задача, стоящая перед замкнутой системой, заключается в том, чтобы поддерживать значения местной температуры равным значениям атмосферной температуры окружающего воздуха изменениями частоты вращения ротора. В результате этого реализуется нужная зависимость значений частоты вращения роторов авиадвигателей от значений скорости движения самолета, обеспечивающая ГДУ работы двигателей и недопущение попадания в них ПП, а также не допускающая снижения тяги силовой установки (СУ) там, где этого не требуется для решения первых двух задач. В настоящее время известен аналогичный способ автоматического управления режимом работы авиадвигателя, в котором вместо значений температуры измеряются и подлежат согласованию значения статического давления на внешних поверхностях мотогондол, подверженных воздействию реверсивных струй (патент на изобретение №2372257, МПК B64D 31/12, опубликовано 10.11.2009). В этом случае регулируется режим работы одного двигателя, а приемник статического давления, значения которого характеризуют режим работы этого двигателя, находится на мотогондоле соседнего двигателя.
Вероятность вихревого засасывания ПП в авиадвигатели на разбеге самолета при взлете аналогичным образом может быть существенно уменьшена с помощью увеличения режима работу СУ с пониженного до максимального в зависимости от увеличения скорости движения самолета по ВПП (патент на изобретение №2325307, МПК B64D 31/12, B64D 33/02, опубликовано 27.05.2008). Как и в ранее описанном примере, простое снижение режима работы СУ на постоянную величину оказывается непригодным для практического применения вследствие ограничений на время и длину пути разбега самолета при взлете. Однако в данном случае автоматическое управление изменением режима работы СУ в процессе разбега самолета может быть организовано только на основе использования программных систем регулирования. Возможность использования для этой цели замкнутых систем к настоящему времени не просматривается.
Если изменение режима работы авиадвигателей производится вручную, то оно должно быть максимально упрощено. В данном случае двигатели некоторое время после момента старта (несколько секунд) выдерживаются на постоянном пониженном режиме работы, а затем РУДы переводятся на максимал. В результате этого осуществляется режим приемистости и выход на максимальный режим работы с темпом, задаваемым автоматикой двигателей. Такой взлет самолета представляет собой разновидность взлета «с додачей» тяги маршевых авиадвигателей. Такой способ взлета, когда с целью снижения вероятности вихревого засасывания ПП в авиадвигатели, приходящейся на один взлет, «самолет начинает разбег при работе двигателей на пониженном режиме (режиме страгивания), а затем в процессе разбега режим работы двигателей увеличивается до максимального» (А.А.Иноземцев, В.Л.Сандрацкий. Газотурбинные двигатели. Глава 5. Пермь, «Авиадвигатель», 2006 г.) принят в качестве прототипа предлагаемого изобретения. Пониженный режим определяется в прототипе по условию отсутствия вихревого засасывания ПП, а его длительность - по условию достижения самолетом скорости движения, равной скорости сдува вихревых шнуров на максимальном режиме работы СУ.
Однако в таком виде, как это требуется в прототипе, эти условия не всегда могут быть выполнены, так как в реальной эксплуатации такой выбор пониженного режима может привести к не допустимо большим значениям времени и длины разбега самолета и не обеспечивает условий безопасности полетов.
Технический результат, на достижение которого направлено изобретение, является минимизация вероятности вихревого засасывания посторонних предметов при соблюдении ограничений на время и длину разбега самолета и на диапазон допустимых пониженных режимов.
Для достижения названного технического результата в предлагаемом способе, включающем взлет «с додачей» тяги при ручном управлении режимом работы силовой установки (СУ) по профилю: страгивание с места исполнительного старта, начало разбега на пониженном режиме работы СУ, продолжение разбега на режиме приемистости СУ на штатном автомате приемистости (электронного регулятора приемистости) с конца пониженного до максимального режима работы СУ, продолжение разбега на максимальном режиме СУ, разгоняясь на пониженном режиме работы СУ, самолет достигает в конце этого режима скорости движения V1V, обеспечивающей сдув вихревых шнуров на режиме приемистости, предварительно проводят стендовые испытания авиадвигателя и исследования модели самолета в аэродинамической трубе. Для оптимизации кинематических параметров взлета осуществляют математическое моделирование динамики разбега самолета и изменения режимов работы СУ на комплексной математической модели «двигатель + самолет». Определяют зависимости параметров режима приемистости СУ и самолета от времени: изменение тяги СУ, расхода воздуха на режиме, скорости сдува вихрей и скорости движения самолета Vs, соответствующие определенным значениям скорости движения самолета в момент начала приемистости СУ. Для каждого пониженного режима и разных значений скорости движения V1 самолета в момент начала приемистости сравнивают зависимости изменения скорости движения модели самолета VS(τ) и скорости сдува вихревых шнуров VSD(τ) от времени. Для каждого значения величины скорости V1 в пределах своего отрезка времени режима приемистости СУ определяют минимальные значения разности VS-VSD между величинами скорости движения самолета VS и скорости сдува VSD, подбирают оптимальное значение скорости движения модели самолета V1 таким, чтобы минимальное значение разности VS-VSD равнялось нулю в процессе приемистости СУ, т.е. подбирают V1 таким образом, чтобы на режиме приемистости выполнялось неравенство, переходящее в равенство в диапазоне времени τ1-τ2:
(VS(τ)-VSD(τ))≥0,
где τ1 - время конца пониженного режима работы СУ и начала приемистости, τ2 - время конца режима приемистости СУ и начала максимального режима раττботы СУ.
По оптимальным рассчитанным значениям V1 определяют значения времени τ01 и длины пути l01 движения на пониженных режимах работы СУ как определенные численные интегралы по скорости в ограничивающих пределах Vs=0 и Vs=V1 от величин 1/a s и Vs/a s, где a s - ускорение самолета на пониженных режимах.
В ограничивающих пределах от скорости Vs=V1 до скорости Vs=V2 определяют на комплексной математической модели значения времени режимов приемистости как разности τ12=τ2-τ1. По значениям времени τ01 и τ12 вычисляют значения времени движения τ02 от момента страгивания до момента выхода СУ на максимальный режим как суммы τ02=τ01+τ12. Определяют на комплексной математической модели для оптимальных рассчитанных значений V1 изменения по времени скорости движения самолета Vs(τ) на режимах приемистости, в том числе значения скорости Vs=V2 в момент выхода СУ на максимальный режим, вычисляют значения длины пути движения самолета l12, проходимого на режимах приемистости при увеличении скорости от Vs=V1 до Vs=V2, как определенные численные интегралы по времени от величины скорости Vs(τ) в ограничивающих пределах от τ1 до τ2, определяют значения длины пути l02, проходимого самолетов при увеличении скорости от Vs=0 до Vs=V2, как суммы l02=l01+l02. Вычисляют значения времени τ02мах и длины пути движения самолета l02max на максимальном режиме работы СУ при изменении скорости от Vs=0 до Vs=V2, как определенные численные интегралы от величин 1/a s и Vs/a s, по скорости в ограничивающих пределах Vs=0 и Vs=V2, вычисляют минимальные, соответствующие оптимальным значениям V1, значения увеличения времени Δτ как разности между значениями τ02 и значениями времени движения на максимальном режиме работы СУ при изменении скорости в пределах от Vs=V1 до Vs=V2: Δτ=τ02-τ02мах, а минимальные значения увеличения длины пути движения Δl - как разности между значениями l02 и значениями длины пути движения на максимальном режиме работы СУ l02мах при изменении скорости в тех же пределах:
Δl=l02-l02мах.
По полученным значениям Δτ, Δl, различным для различных пониженных режимов, судят о соответствии значений времени и длины пути разбега самолета заданным ограничениям и о допустимости использования тех или иных пониженных режимов при взлете «с додачей» тяги.
Ускорение самолета и скорость сдува вихревого шнура определяют с учетом влияния встречной составляющей скорости ветра.
Кроме того, оптимальный пониженный режим СУ выбирают как минимально возможный пониженный режим, удовлетворяющий ограничениям на увеличение времени и длины пути разбега в диапазоне пониженных режимов с нижним пределом для пониженного режима в виде либо режима малого газа либо предельного пониженного режима, обеспечивающего отсутствие вихревого засасывания посторонних предметов, либо пониженного режима, соответствующего безусловному минимуму вероятности вихревого засасывания ПП, приходящейся на один взлет, в зависимости от того, на котором из указанных пониженных режимов частота вращения роторов выше всего.
Более того, для силовой установки самолета, имеющей более одного маршевого авиадвигателя, характеризующейся различными значениями скорости сдува вихревого шнура при одних и тех же режимах работы авиадвигателей, скорости сдува вихревого шнура силовой установки определяют в расчете на худший случай по тому маршевому авиадвигателю, у которого скорость сдува вихревого шнура наибольшая.
Для осуществления взлета «с додачей» тяги при оптимальных значениях его кинематических параметров летчику сообщают расчетные значения частот вращения роторов авиадвигателей, соответствующих пониженному режиму работы СУ, и соответствующие ему значения времени и длины пути движения на этом пониженном режиме, обеспечивающие минимальную вероятность вихревого засасывания ПП, приходящуюся на один взлет, при соблюдении ограничений на время и длину пути разбега самолета при взлете и на диапазон допустимых пониженных режимов.
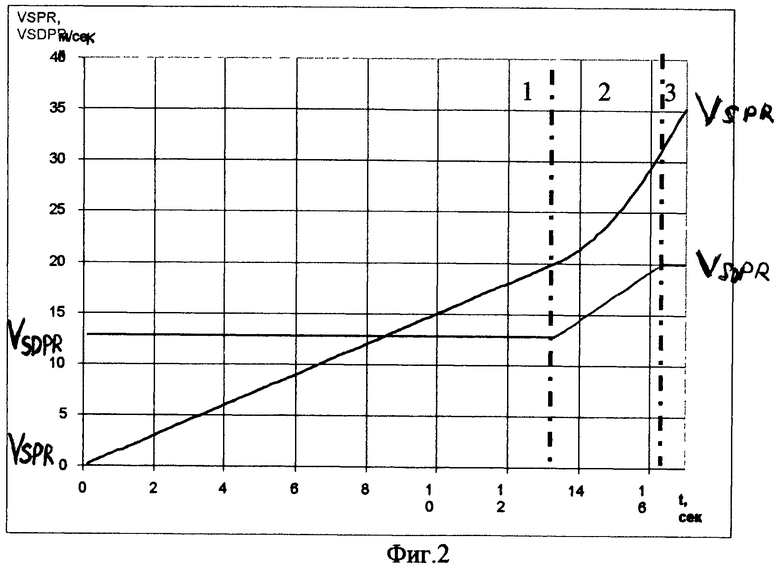
Предлагаемый способ поясняется следующей фиг.1, на которой приведен пример совместного протекания по времени τ скорости самолета Vs и скорости сдува вихревого шнура VSD при расчетных оптимальных значениях кинематических параметров взлета «с додачей» тяги, где пониженный режим работы СУ обозначен цифрой - 1, режим приемистости - 2, максимальный режим - 3. Пример совместного протекания по времени скоростей VS и VSD согласно прототипу приводится для сравнения на фиг.2.
Способ осуществляется следующим образом.
Предварительно проводят стендовые испытания авиадвигателя и исследования модели самолета в аэродинамической трубе. Для оптимизации кинематических параметров взлета осуществляют математическое моделирование динамики разбега самолета и изменения режимов работы СУ на комплексной математической модели «двигатель + самолет». Определяют зависимости параметров режима приемистости СУ и самолета от времени: изменение тяги СУ, расхода воздуха на режиме, скорости сдува вихрей и скорости движения самолета, соответствующие определенным значениям скорости движения самолета V1 в момент начала приемистости СУ. Для каждого пониженного режима и разных значений скорости движения V1 самолета в момент начала приемистости сравнивают зависимости изменения скорости движения модели самолета VS(τ) и скорости сдува вихревых шнуров VSD(τ) от времени. Для каждого значения величины скорости V1 в пределах своего отрезка времени режима приемистости СУ определяют минимальные значения разности VS-VSD между величинами скорости движения самолета VS и скорости сдува VSD, подбирают оптимальное значение скорости движения модели самолета V1 таким, чтобы минимальное значение разности VS-VSD равнялось нулю в процессе приемистости СУ, т.е. подбирают V1 таким образом, чтобы на режиме приемистости выполнялось неравенство, переходящее в равенство в диапазоне времени τ1-τ2:
(VS(τ)-VSD(τ))≥0,
где τ1 - время начала приемистости и конца пониженного режима работы СУ,
τ2 - время конца режима приемистости СУ и начала максимального режима работы СУ.
По оптимальным рассчитанным значениям V1 определяют значения времени τ01 и длины пути l01 движения на пониженных режимах работы СУ как определенные численные интегралы по скорости в ограничивающих пределах Vs=0 и Vs=V1 от величин 1/a s и Vs/a s, где a s - ускорение самолета на пониженных режимах.
В ограничивающих пределах от скорости Vs=V1 до скорости Vs=V2 определяют на комплексной математической модели значение времени режимов приемистости как разности τ12=τ2-τ1. По значениям времени τ01 и τ12 вычисляют значения времени движения τ02 от момента страгивания до момента выхода СУ на максимальный режим как суммы τо2=τ01+τ12. Определяют на комплексной математической модели для оптимальных рассчитанных значений V1 изменения по времени скорости движения самолета Vs(τ) на режимах приемистости, в том числе значения скорости Vs=V2 в момент выхода СУ на максимальный режим, вычисляют значения длины пути движения самолета l12, проходимого на режимах приемистости при увеличении скорости от Vs=V1 до Vs=V2, как определенные численные интегралы по времени от величины скорости Vs(τ) в ограничивающих пределах от τ1 до τ2, определяют значения длины пути l02, проходимого самолетом при увеличении скорости от Vs=0 до Vs=V2, как суммы l02=l01+l02. Вычисляют значения времени τ02мах и длины пути движения самолета l02мах на максимальном режиме работы СУ при изменении скорости от Vs=0 до Vs=V2, как определенные численные интегралы от величин 1/a s и Vs/a s, по скорости в ограничивающих пределах Vs=0 и Vs=V2, вычисляют минимальные, соответствующие оптимальным значениям V1, значения увеличения времени Δτ как разности между значениями τ02 и значениями времени движения на максимальном режиме работы СУ при изменении скорости в пределах от Vs=0 до Vs=V2: Δτ=τ02-τ02мах, а минимальные значения увеличения длины пути движения Δl - как разности между значениями l02 и значениями длины пути движения на максимальном режиме работы СУ l02мах при изменении скорости в тех же пределах:
Δl=l02-l02мах.
По полученным значениям Δτ, Δl, различным для различных пониженных режимов, судят о соответствии значений времени и длины пути разбега самолета заданным ограничениям и о допустимости использования тех или иных пониженных режимов при взлете «с додачей» тяги.
Ускорение самолета и скорость сдува вихревого шнура определяют с учетом влияния встречной составляющей скорости ветра.
Кроме того, оптимальный пониженный режим СУ выбирают как минимально возможный пониженный режим, удовлетворяющий ограничениям на увеличение времени и длины пути разбега в диапазоне допустимых пониженных режимов с нижним пределом для пониженного режима в виде либо режима малого газа либо предельного пониженного режима, обеспечивающего отсутствие вихревого засасывания посторонних предметов, либо пониженного режима, соответствующего безусловному минимуму вероятности вихревого засасывания ПП, приходящейся на один взлет, в зависимости от того, на котором из указанных пониженных режимов частота вращения роторов выше всего.
Более того, для силовой установки самолета, имеющей более одного маршевого авиадвигателя, характеризующихся различными значениями скорости сдува вихревого шнура при одних и тех же режимах работы авиадвигателей, скорости сдува вихревого шнура силовой установки определяют в расчете на худший случай по тому маршевому авиадвигателю, у которого скорость сдува вихревого шнура наибольшая.
Для осуществления взлета «с додачей» тяги при оптимальных значениях его кинематических параметров летчику сообщают расчетные значения частот вращения роторов авиадвигателей, соответствующих пониженному режиму работы СУ, и соответствующие ему значения времени и длины пути движения на этом пониженном режиме, обеспечивающие минимальную вероятность вихревого засасывания ПП, приходящуюся на один взлет, при соблюдении ограничений на время и длину пути разбега самолета при взлете и на диапазон пониженных режимов.
Значения времени τ01(c) и длины пути l01 (м) движения самолета на пониженном режиме работы СУ могут быть вычислены по значениям скорости его движения V1 в момент начала приемистости с помощью приближенных зависимостей:

где а 1 - ускорение самолета на пониженном режиме работы СУ в момент страгивания самолета с места (исполнительного) старта, м/с2.
Увеличение скорости движения самолета Vs от Vs=0 до Vs=V1 требует для пониженного и максимального режимов работы СУ различных значений времени и длины пути движения самолета. Увеличение времени Δτ01 (с) и длины пути Δl01 (м) на пониженном режиме работы СУ по сравнению с максимальным режимом на участке движения от скорости Vs=0 до Vs=V1 можно вычислить с помощью приближенных аналитических выражений:

где а 2 - ускорение самолета на максимальном режиме работы СУ в момент страгивания с места старта, м/с2.
Идеальный результат применения взлета «с додачей» тяги как эксплуатационного способа защиты авиадвигателей от вихревого засасывания ПП - это когда полностью исключена возможность вихревого засасывания ПП. Применение способа защиты считается эффективным, если вероятность вихревого засасывания ПП, приходящаяся на один взлет, снижается на порядок. Снижение вероятности вихревого засасывания ПП можно характеризовать количественно коэффициентом снижения КР12, равным отношению вероятности вихревого засасывания ПП при взлете «с додачей» тяги к вероятности вихревого засасывания ПП при взлете на максимальном режиме работы маршевых авиадвигателей. Коэффициент снижения вероятности вихревого засасывания ПП КР12(б/р), приходящейся на один взлет, можно приближенно вычислить с помощью формулы:

где VSDW 1, VSD 1 и VSDW 2, VSD 2 - скорость сдува вихря (вихревого шнура) на пониженном и максимальном режимах работы авиадвигателя относительно воздуха и относительно земли (с индексом (…)W и без этого индекса), м/с.
Если вихревое засасывание ПП при взлете «с додачей» тяги исключено, то КР12=0. Скорость сдува вихря VSDW или VSD - это скорость движения самолета на границе сдува вихря встречным потоком воздуха. Согласно имеющимся на сегодняшний день сведениям воздушная (относительно воздуха) скорость сдува вихревого шнура существенным образом зависит от режима работы авиадвигателя и с учетом встречной составляющей скорости ветра должна вычисляться по формуле:

где AF - коэффициент формы воздухозаборника авиадвигателя, (б/р);
σВХ - коэффициент восстановления полного давления в воздухозабонике, (б/р);
 - расход воздуха через авиадвигатель при рассматриваемых атмосферных условиях, кг/с;
- расход воздуха через авиадвигатель при рассматриваемых атмосферных условиях, кг/с;
 - размерная постоянная размерной плотности, кг/м3;
- размерная постоянная размерной плотности, кг/м3;
Н - высота расположения оси воздухозаборника авиадвигателя над поверхностью ВПП, м. Скорость движения самолета относительно воздуха VSW равна скорости относительно земли VS, увеличенной (аддитивно) на встречную составляющую скорости ветра VW (м/с). Соответственно, скорость сдува вихревого шнура VSD относительно земли равна скорости сдува относительно воздуха VSDW, уменьшенной на VW:

Коэффициент 2,3 в фюрмуле для скорости сдува VSDW был получен в свое время Кизимом В.Я. (ЛИИ, 1983 г.) по результатам ветрового обдува неподвижного воздухозаборника авиадвигателя. Встречная составляющая скорости ветра неравномерна по высоте и убывает с приближением к поверхности аэродромного покрытия до нуля. Встречная составляющая скорости набегающего на воздухозаборник воздушного потока, обусловленная движением самолета по земле, равномерна по высоте. Поэтому вполне возможно значения скоростей сдува вихревого шнура (и VSDW и VSD), полученные с помощью уточненной методики на движущемся самолете, окажутся меньше, чем это следует из (04).
Приближенные формулы (01) и (02) имеют достаточно точные аналоги, в которых вместо значений ускорения а 1 и а 2 используются определенным образом усредненные по скорости значения ускорения самолета на пониженном (индекс α PON) и максимальном (индекс α MAX) режимах работы его силовой установки:
Индексы (…)T и (…)L относятся к аналогам верхних (для времени) и нижних (для длины пути) формул из (01) и (02). Значение скорости движения самолета VS=V1 в момент начала режима приемистости СУ заметно влияет на усредненные значения ускорения не только на отрезке значений скорости от VS=0 до VS=V1 (пониженный режим), но также и на режиме приемистости, когда время (при взлете «с додачей» тяги) увеличивается от τ=τ1 до τ=τ2 на величину времени (частичной) приемистости τ12=τ2-τ1, скорость движения возрастает от VS=V1 до VS=V2, а режим работы силовой установки увеличивается с пониженного до максимального.
Для увеличения скорости движения самолета от VS=V1 до VS=V2 на максимальном режиме работы СУ требуется меньшее время и меньшая длина пути движения, чем при работе СУ на приемистости. Значения увеличения времени Δτ12 (с) и длины пути Δl12 (м) движения самолета на режиме приемистости составляют:

где α V12 и α L12 - определенным образом усредненные по времени значения ускорения самолета на режиме приемистости СУ, м/с2;
α MAX T12 и α MAX L12 - усредненные по скорости значения ускорения самолета на максимальном режиме работы СУ, аналогичные величинам α MAX T01 и α MAX L01 с той разницей, что вместо диапазона скоростей [0, V1] для усреднения используется диапазон [V1, V2]. При этом:
Зависимость ускорения самолета α PRI(τ) (м/с2) от времени τ (с) на режиме приемистости может быть получена численным моделированием на комплексной математической модели «силовая установка + самолет» или в натурном эксперименте.
Увеличение времени Δτ (с) и длины пути Δl (м) движения самолета, обусловленное применением взлета «с додачей» тяги СУ, по сравнению с взлетом на режиме максимальной тяги получаются в виде сумм:

Затраты времени и длины пути движения на дальнейшее увеличение скорости самолета от VS=V2 и выше для взлета «с додачей» такие же, как и для взлета на максимальном режиме, поскольку теперь и там и тут СУ работает на максимале. Поэтому равенства (09) дают окончательные значения увеличения времени и длины пути разбега при взлете «с додачей» тяги.
Если пренебречь влиянием скорости движения самолета на тягу СУ, а также пренебречь аэродинамическим сопротивлением самолета в рассматриваемом диапазоне скоростей 0≤VS≤V2, то

Если к тому же допустить, что на режиме частичной приемистости ускорение самолета α PRI(τ) возрастает линейно по времени от α 1 до α 2 то

И тогда в качестве приближенных аналитических выражений для увеличения времени Δτ и длины пути Δl имеем:
К моменту выхода силовой установки на максимальный режим работы при взлете «с додачей» тяги самолет достигает скорости движения V2, проходит при этом путь l02 за время τ02, которые можно вычислить по формулам:

Представленные выше количественные соотношения показывают, что скорость движения самолета V1 в момент начала режима приемистости при взлете «с додачей» тяги является ключевым параметром, определяющим целый ряд величин: время и длину пути движения на пониженном режиме работы СУ, увеличение времени и длины пути движения самолета, обусловленное применением взлета «с додачей» тяги, а также скорость движения самолета в момент выхода СУ на максимальный режим, время и длину пути движения, затраченные для достижения этой скорости.
Выбор значения V1, равного скорости сдува VSDmax, минимизирует вероятность вихревого засасывания ПП, т.е. понижает вероятность вихревого засасывания ПП, приходящуюся на один взлет, до минимально возможного значения при заданном пониженном режиме работы СУ. Однако у такого способа взлета «с додачей» тяги имеется недостаток - минимизация вероятности вихревого засасывания ПП производится не самым экономным способом. Увеличение времени и длины пути разбега самолета, обусловленное применением взлета «с додачей» тяги, превышает минимально возможное увеличение времени и длины пути разбега, обеспечивающее минимальную вероятность вихревого засасывания ПП при заданном пониженном режиме работы СУ и последующем переводе ее на максимальный режим с помощью автомата (контура) приемистости. Автомат (контур) приемистости является составной частью системы автоматического регулирования авиадвигателя.
В предлагаемом способе сравнивают различные зависимости скорости движения самолета VS и скорости сдува вихревых шнуров VSD от времени на режимах приемистости, полученные (зависимости) при различных значениях скорости движения самолета V1. Для каждого значения величины скорости V1 в пределах своего отрезка времени режима приемистости определяют минимальное значение разности между величинами скорости движения самолета VS и скорости сдува VSD, т.е. значение величины min(VS(τ)-VSD(τ)), τ1≤τ≤τ2, и таким образом получают пары узловых значений аргумента (V1) и функции (min(VS-VSD)). По мере необходимости дополняют эти пары узловых значений парами новых узловых значений вблизи значения min(VS-VSD), равного нулю, для которых:

и, наконец, определяют значение скорости движения самолета V1, соответствующее выполнению условия (14) - неравенства, переходящего в равенство, т.е. в котором упомянутый минимум обращается в нуль, см. табл.1, в которой представлены исходные данные для выбора значений V1, см. табл.2, в которой представлены результаты расчета, используемые при выборе оптимального пониженного режима.
При учете ограничений α 1≥1 м/c2, Δτ≤10 с, Δl≤100 м оптимальные парметры взлета «с додачей» тяги получаются соответствующими 2-й строке табл.2.
Минимизация увеличения времени и длины пути разбега самолета при условии минимума вероятности вихревого засасывания ПП достигается тем, что в качестве значения скорости движения самолета V1 в момент начала перевода режима работы силовой установки с пониженного на максимальный используют значение V1, соответствующее неравенству (14), т.е. соответствующее нулевому значению минимальной на режиме приемистости разности между скоростью движения самолета и скоростью сдува вихревого шнура.
В качестве уточнения можно добавить, что исходные наборы зависимостей VS(τ), VSD (τ) и соответствующих им значений V1 должны соответствовать одним и тем же атмосферным условиям, одним и тем же значениям скорости и направления ветра, одному и тому же пониженному режиму работы авиадвигателей, одному и тому же весу самолета и т.п. Полученное в итоге оптимальное значение V1 и соответствующие ему минимальные значения увеличения времени и длины пути движения самолета будут соответствовать исходным атмосферным и ветровым условиям, исходному пониженному режиму работы авиадвигателей и т.п.
Увеличение встречной составляющей скорости ветра уменьшает скорость сдува вихревых шнуров VSD (относительно земли), а вслед за ней - оптимальную скорость движения самолета V1 в момент начала режима приемистости авиадвигателей, минимальное увеличение времени и длины пути разбега самолета, а также время и длину пути движения на пониженном режиме работы. Определяемое предлагаемым способом значение скорости V1 (см. фиг.1), соответствующее началу режима приемистости, так же как и определяемое по способу-прототипу, обеспечивает сдув вихревого шнура не позже, чем начинается режим приемистости, отсутствие вихревого шнура на режиме приемистости и его отсутствие в дальнейшем, на максимальном режиме работы маршевых авиадвигателей. Вероятность вихревого засасывания ПП получается такая же, как при способе-прототипе - минимально возможная для используемого пониженного режима работы маршевых авиадвигателей. Однако не в ущерб снижению вероятности вихревого засасывания ПП режим приемистости начинается всегда на меньшей скорости движения самолета, чем в случае применения способа-прототипа. Соответственно значения увеличения времени и длины пути разбега самолета при его взлете получаются всегда меньше, чем в случае способа-прототипа. Это «всегда» обусловлено тем, что авиадвигатель переходит с пониженного на максимальный режим работы всегда не мгновенно, время переходного процесса всегда конечно. Темп нарастания режима работы авиадвигателя в процессе приемистости задается автоматом (контуром) приемистости авиадвигателя с целью обеспечения его газодинамической устойчивости. В процессе приемистости возрастает скорость сдува вихревого шнура и продолжает возрастать скорость движения самолета. В момент начала режима приемистости рекомендуемая предлагаемым способом скорость движения самолета VS=V1 равна или больше, чем скорость сдува на пониженном режиме, но меньше, чем скорость сдува на максимальном режиме работы авиадвигателей:

В момент выхода на максимальный режим работы скорость движения самолета VS равна или больше скорости сдува вихревого шнура на максимальном режиме:

т.е. равна или больше, чем скорость, задаваемая прототипом в качестве скорости движения самолета V1 в момент начала приемистости.
Если темп нарастания скорости сдува вихревых шнуров в процессе приемистости превышает ускорение самолета (в том числе и на максимальном режиме работы СУ), то согласно предлагаемому способу, взаимное равенство текущих (по времени) значений скорости движения самолета и скорости сдува вихревых шнуров достигается в самом конце режима приемистости. В другие моменты времени работы авиадвигателей на режиме приемистости текущая скорость движения самолета превышает текущую скорость сдува вихревых шнуров, в том числе и в момент начала приемистости, а также в последующие моменты времени продолжения разбега самолета на максимальном режиме работы СУ.
Если темп нарастания скорости сдува соответствует промежуточному значению между значениями ускорения самолета на пониженном и максимальном режимах работы авиадвигателей, то при использовании предлагаемого способа взаимное равенство текущих (по времени) значений скорости движения самолета и скорости сдува вихревых шнуров достигается где-то в промежутке между моментами начала и конца режима приемистости. В другие моменты времени работы СУ на режиме приемистости текущая скорость самолета превышает текущую скорость сдува. При продолжении разбега самолета на максимальном режиме работы авиадвигателей скорость движения самолета тем более превышает скорость сдува вихревых шнуров.
Если темп нарастания скорости сдува вихревых шнуров в процессе приемистости авиадвигателей меньше ускорения самолета, в том числе и на пониженном режиме их работы, то согласно предлагаемому способу скорость движения самолета в момент начала режима приемистости равна скорости сдува вихревых шнуров на пониженном режиме работы авиадвигателей. В остальные моменты времени на режиме приемистости и в дальнейшем на максимальном режиме работы авиадвигателей скорость движения самолета превышает скорость сдува вихревых шнуров.
В этом случае скорость сдува вихревых шнуров превышает скорость движения самолета на протяжении всего времени работы авиадвигателей на пониженном режиме, за исключением момента конца пониженного режима, совпадающего с моментом начала режима приемистости. В этот момент разность между скоростью самолета и скоростью сдува изменяет свой знак на противоположный. Вихревые шнуры сдуваются и более не возникают. В первых двух других, описанных выше случаях, самолет разгоняется на пониженном режиме согласно предлагаемому способу до скорости сдува и еще некоторое время. Взаимное равенство текущих значений скорости движения самолета и скорости сдува достигается дважды. В первый момент кривые пересекаются между собой, и вихревые шнуры сдуваются до начала режима приемистости. Во второй момент (на режиме приемистости) кривые взаимно касаются. Вихревой шнур не возникает.
Во всех трех случаях исключается вихревое засасывание ПП на режиме приемистости и на максимальном режиме, в результате чего вероятность вихревого засасывания ПП, приходящаяся на один взлет, минимальна для рассматриваемого пониженного режима работы авиадвигателей. Соответственно, скорость движения самолета в момент начала режима приемистости, а также увеличение времени и длины пути разбега минимизированы при условии сдува вихревого шнура на приемистости и на максимальном режиме работы СУ.
Как показывают результаты расчетов, выполненных для тяжелого самолета с относительно высоко расположенными маршевыми авиадвигателями (ИЛ-76) и для самолета типа истребителя, взлет «с додачей» тяги по предлагаемому способу позволяет уменьшить по сравнению с прототипом увеличение времени разбега на 30%, а увеличение длины пути разбега - на 50%. Сравнение проводилось при одном и том же пониженном режиме, приводящем к одному и тому же снижению вероятности вихревого засасывания ПП (примерно в 12 раз).
Что касается способа взлета «с додачей» тяги, когда тяга СУ увеличивается непрерывно и постепенно с увеличением скорости движения самолета (упомянутый выше патент №2325307), то его реализация требует применения специальной программой системы автоматического регулирования приведенной частоты вращения роторов авиадвигателей от числа М движения самолета по ВПП. Для предлагаемого способа этого не требуется. Предлагаемый способ существенно проще в реализации. Применение непрерывного регулирования по скорости на тяжелых самолетах с близко расположенными к поверхности ВПП маршевыми авиадвигателями и их воздухозаборниками (таких, как Ту-204, RRJ, МС-21) может уменьшить время и длину пути разбега по сравнению с предлагаемым способом. Однако применение непрерывного регулирования на самолетах, имеющих достаточно высокую тяговооруженность, у которых маршевые двигатели работают в одинаковых в плане вихревого засасывания ПП условиях, не имеет преимуществ по сравнению с предлагаемым способом ни по снижению вероятности вихревого засасывания ПП, ни по увеличению времени, ни по увеличению длины пути разбега самолета при взлете. И в том и в другом способах скорость движения самолета в момент начала режима приемистости равна скорости сдува вихревых шнуров на пониженном режиме работы авиадвигателей. И нет никаких причин, чтобы пониженные режимы в том и другом случаях различались. Темп возрастания по времени режима работы авиадвигателей на приемистости - также одинаковый, поскольку и там и там ограничивается штатным автоматом (контуром в электронной системе РЭД) приемистости сверху по условию обеспечения газодинамической устойчивости компрессоров авиадвигателей. Более медленное увеличение режима только увеличивает время и длину пути разбега и неприемлемо. Таким образом усложнение конструкции, обусловленное применением непрерывного регулирования, не дает для таких самолетов никаких преимуществ. Более того, учет влияния встречной составляющей ветра при непрерывном регулировании требует независимого измерения на борту не только воздушной (относительно воздуха), но также и путевой (относительно земли) скорости движения самолета и соответствующего усложнения программы регулирования. В то время как в предлагаемом способе такой учет означает только изменение времени (длины пути) движения на пониженном режиме, сообщаемого летчику.
В результате достижения цели предлагаемого изобретения определенные таким способом минимизированные значения увеличения времени и длины пути разбега самолета при взлете оказываются функциями пониженного режима. Однако остается некоторый произвол, а именно произвол в выборе самого пониженного режима работы авиадвигателей. В прототипе пониженный режим определяется по условию полного отсутствия вихревого засасывания ПП, т.е. пониженный режим - это максимально возможный режим, при работе на котором нет вихревого засасывания. Это существенно ограничивает область применения прототипа, поскольку значения увеличения времени или длины пути разбега могут оказаться недопустимо большими.
В предлагаемом изобретении пониженный режим определяется с учетом ограничений на увеличение времени и длины пути разбега самолета при взлете. Для минимизации вероятности вихревого засасывания ПП в качестве пониженного режима принимается предельно возможный пониженный режим работы авиадвигателя, если на нем отсутствует вихревое засасывание ПП, а минимальные значения увеличения времени и длины пути разбега, соответствующие этому режиму, получаются в пределах заданных ограничений. Если же выполнение обоих условий не удается совместить, то в качестве пониженного режима принимается такой режим работы авиадвигателей, который обеспечивает соблюдение ограничений для минимальных значений увеличения времени и длины пути разбега и при этом приводит к минимально возможному значению коэффициента КР12, который характеризует снижение вероятности вихревого засасывания ПП по отношению ко взлету на максимале (см. формулу (03)). При достаточно малом избытке тяги СУ, но возможном засасывании ПП на режиме малого газа (МГ) зависимость коэффициента KP12 от режима имеет безусловный минимум, который достигается на пониженном режиме, превышающем режим МГ. Ниже этого безусловного минимума дальнейшее снижение пониженного режима не только увеличивает значения увеличения времени и длины пути разбега самолета при взлете «с додачей» тяги СУ, но также увеличивает и вероятность вихревого засасывания ПП, приходящуюся на один взлет. Аномальное увеличение вероятности вихревого засасывания ПП с уменьшением режима работы СУ обусловлено увеличением времени существования вихревого шнура, которое равно отношению VSD1/α 1. Независимо от соблюдения или несоблюдения ограничений, независимо от наличия засасывания вихревым шнуром или его отсутствия, в любом случае при использовании взлета «с додачей» тяги как эксплуатационного метода защиты маршевых авиадвигателей от вихревого засасывания в них ПП не имеет большого смысла применять пониженные режимы ниже режима, соответствующего безусловному минимуму значения коэффициента КР12.
Таким образом, технический результат достигается путем минимизации (с использованием формулы (03)) вероятности вихревого засасывания ПП, приходящейся на один взлет, при соблюдении ограничений на минимальные значения увеличения времени и длины пути разбега самолета и на диапазон пониженных режимов работу СУ. Эта цель достигается тем, что пониженный режим определяется как минимально возможный при соблюдении ограничений на минимальные значения увеличения времени и длины пути разбега самолета. При этом минимизация пониженного режима производится в диапазоне режимов работы СУ в пределах от безусловного минимума коэффициента КР12 до максимального режима.
Способ становится универсальным, не зависящим от конкретного вида характеристик силовой установки и самолета, если нижний предел диапазона допустимого изменения пониженного режима определяется несколько более сложным образом - как максимальный из 3-х (2-х, 1-го) возможных режимов работы СУ: режима, соответствующего безусловному минимуму значения КР12, предельно высокого пониженного режима, на котором еще полностью отсутствует вихревое засасывание ПП и режима МГ. В случае неполного устранения вихревого засасывания ПП упомянутая выше формула (03) может быть использована для оценки в окончательном варианте снижения вероятности вихревого засасывания ПП по определенному указанным способом пониженному режиму и для количественной оценки эффективности применения взлета «с додачей» тяги в плане защиты авиадвигателей от вихревого засасывания ПП.
Все ранее написанное касается силовой установки с одним маршевым авиадвигателем или СУ с двумя (и более) маршевыми авиадвигателями, работающими в одинаковых в плане вихревого засасывания ПП условиях. Пусть теперь маршевые авиадвигатели силовой установки и их воздухозаборники расположены на самолете на различных высотах по отношению к поверхности ВПП. Тогда зависимость скорости сдува вихревого шнура от режима работы будет своя для каждого маршевого авиадвигателя. Чем ближе воздухозаборник авиадвигателя к поверхности ВПП, тем больше значение скорости сдува вихревого шнура при одном и том же режиме работы двигателя. Для простоты ручного управления будем полагать, что пониженный режим - один и тот же для всех маршевых авиадвигателей силовой установки. Если силовая установка имеет три маршевых авиадвигателя и третий двигатель расположен достаточно высоко над поверхностью ВПП, то для третьего двигателя вместо пониженного можно использовать максимальный режим работы, с самого начала ускоренного движения по ВПП. В случае многодвигательной СУ предпочтительным представляется расчет на худший случай. В качестве зависимости скорости сдува вихревых шнуров от режима работы СУ принимается зависимость скорости сдува вихревого шнура от режима работы того авиадвигателя, для которого скорость сдува наибольшая. При этом в результате осуществления взлета «с додачей» тяги по предлагаемому способу вероятность вихревого засасывания ПП, приходящаяся на один взлет, а также увеличение времени и длины пути разбега самолета при взлете получаются условно минимизированными. Условная минимизация включают в себя ограничения и определенную последовательность оптимизаций с соблюдением ограничений. Пониженные режимы работы силовой установки ограничивают допущением, что все маршевые авиадвигатели СУ работают на одном и том же пониженном режиме. Включение режима приемистости - одномоментное для всех двигателей. В качестве зависимости скорости сдува вихревых шнуров от режима работы силовой установки принимается зависимость скорости сдува вихревого шнура, располагающегося на входе в воздухозаборник того маршевого авиадвигателя, для которого значения скорости сдува наибольшие. Значения вероятности вихревого засасывания ПП, приходящейся на один взлет, минимизируют (предварительно) тем, что исключают вихревое засасывание ПП на приемистости и на максимальном режиме посредством использования ограничений снизу на значения скорости самолета V1, ответствующей моменту начала приемистости. Затем минимизируют значения скорости самолета V1, а вместе с ними и значения увеличения времени и длины пути разбега самолета (при взлете) с учетом упомянутых выше ограничений. В результате этого получают однозначные зависимости скорости V1, а также значения увеличения времени и длины пути разбега от пониженного режима работы СУ. Затем окончательно минимизируют вероятность вихревого засасывания ПП, приходящуюся на один взлет, совместными вариациями пониженного режима работы СУ и значений скорости V1 при соблюдении ограничений на увеличение времени и длины пути разбега самолета в процессе взлета, а также на диапазон допустимых пониженных режимов.
Операции минимизации скорости V1 с соблюдением ограничений снизу на исключение вихревого засасывания ПП на приемистости эквивалентны по результатам вычислений решениям уравнения (14). Первое проще для человеческого восприятия, второе - для алгоритмизации.
Изобретение относится к области авиации, в частности к способам защиты авиационных двигателей от попадания в них посторонних предметов с поверхности взлетно-посадочной полосы. Способ заключается в страгивании с места исполнительного старта, начале разбега на пониженном режиме работы силовой установки, продолжении разбега на режиме приемистости на штатном автомате приемистости с конца пониженного до максимального режимов работы силовой установки, продолжении разбега на максимальном режиме силовой установки. Предварительно проводят стендовые испытания авиадвигателя и исследования модели самолета в аэродинамической трубе. Для оптимизации кинематических параметров взлета осуществляют математическое моделирование динамики разбега самолета и изменения режимов работы силовой установки на комплексной математической модели «двигатель + самолет». Для осуществления взлета «с додачей» тяги при оптимальных значениях его кинематических параметров летчику сообщают расчетные значения частот вращения роторов авиадвигателей, соответствующие пониженному режиму работы силовой установки, и соответствующие ему значения времени и длины пути движения на этом пониженном режиме, обеспечивающие минимальную вероятность вихревого засасывания посторонних предметов. Достигается минимизация вероятности вихревого засасывания посторонних предметов при соблюдении ограничений на время и длину разбега самолета, а также на диапазон пониженных режимов. 1 з.п. ф-лы, 2 ил., 2 табл.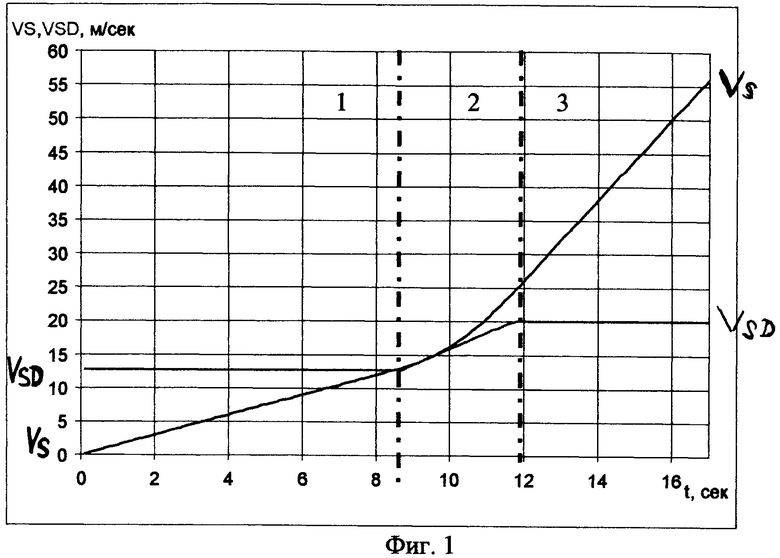
1. Эксплуатационный способ защиты самолетных маршевых авиадвигателей от вихревого засасывания посторонних предметов, включающий взлет «с додачей» тяги при ручном управлении режимом работы силовой установки но профилю, страгивание с места исполнительного старта, начало разбега на пониженном режиме работы силовой установки, продолжение разбега на режиме приемистости силовой установки на штатном автомате приемистости электронного/цифрового регулятора приемистости с конца пониженного до максимального режимов работы силовой установки, продолжение разбега на максимальном режиме работы силовой установки, разгоняясь на пониженном режиме работы силовой установки самолет достигает в конце этого режима скорости движения V1, обеспечивающей сдув вихревых шнуров на режиме приемистости, отличающийся тем, что предварительно проводят стендовые испытания авиадвигателя и исследования самолета в аэродинамической трубе, для оптимизации кинематических параметров взлета осуществляют математическое моделирование динамики разбега самолета и изменения режимов работы силовой установки на комплексной математической модели «двигатель + самолет», определяют зависимости параметров режима приемистости силовой установки и самолета от времени: изменение тяги силовой установки, расхода воздуха на режиме, скорости сдува вихрей и скорости движения самолета Vs, соответствующие определенным значениям скорости движения самолета V1 в момент начала приемистости силовой установки, для каждого пониженного режима и разных значений скорости движения V1 самолета в момент начала приемистости сравнивают зависимости изменения скорости движения модели самолета V1(τ) и скорости сдува вихревых шпуров VSD (τ) от времени, подбирают оптимальное значение скорости движения самолета V1, свое для своего пониженного режима, таким, чтобы минимальное значение разности VS-VSD равнялось нулю в процессе приемистости силовой установки, т.е. чтобы на режимах приемистости выполнялось неравенство, переходящее в равенство в диапазоне времени τ1-τ2:
(VS(τ)-VSD(τ))≥0,
где τ1 - время начала приемистости и конца пониженного режима работы силовой установки, τ2 - время конца режима приемистости силовой установки и начала максимального режима работы силовой установки, по оптимальным рассчитанным значениям V1 определяют значения времени τ01 и длины пути l01 движения на пониженных режимах работы силовой установки, как определенные численные интегралы по скорости в ограничивающих пределах Vs=0 и Vs=V1 от величин 1/as и Vs/as, где as - ускорение самолета на пониженных режимах, в ограничивающих пределах от скорости Vs=V1 до скорости Vs=V2, определяют на комплексной математической модели значение времени режимов приемистости как разности τ12=τ2-τ1, по значениям времени τ01 и τ12 вычисляют значения времени движения τ02 от момента страгивания до момента выхода силовой установки на максимальный режим как суммы τ02=τ01+τ12, определяют на комплексной математической модели для оптимальных рассчитанных значений V1 изменения по времени скорости движения самолета Vs(τ) на режимах приемистости, и в том числе, значения скорости Vs=V2 в момент выхода силовой установки на максимальный режим вычисляют значения длины пути движения самолета l12 от скорости Vs=0 до Vs=V2, проходимого на режимах приемистости при увеличении скорости от Vs=V1 до Vs=V2, как определенные численные интегралы по времени от величины скорости Vs(τ) в ограничивающих пределах от τ1 до τ2 - определяют значения длины пути l02, проходимого самолетом при увеличении скорости от Vs=0 до Vs=V2, как суммы l02=l01+l02, вычисляют значения времени τ02мах и длины пути движения самолета l02max на максимальном режиме работы силовой установки при изменении скорости от Vs=0 до Vs=V2, как определенные численные интегралы от величин 1/as, и Vs/as по скорости в ограничивающих пределах Vs=0 и Vs=V2, вычисляют минимальные, соответствующие оптимальным значениям V1, значения увеличения времени Δτ как разности между значениями τ02 и значениями времени движения на максимальном режиме работы СУ при изменении скорости в пределах от Vs=0 до Vs=V2:
Δτ=τ02-τ02мах,
а минимальные значения увеличения длины пути движения Δl - как разности между значениями l02 и значениями длины пути движения на максимальном режиме работы СУ l02мах при изменении скорости в тех же пределах:
Δl=l02-l02мах,
по полученным значениям Δτ, Δl, различным для различных пониженных режимов, судят о соответствии значений времени и длины пути разбега самолета заданным ограничениям и о допустимости использования тех или иных пониженных режимов при взлете «с додачей» тяги, ускорение самолета и скорость сдува вихревого шнура определяют с учетом влияния встречной составляющей скорости ветра, оптимальный пониженный режим силовой установки выбирают как минимально возможный пониженный режим, удовлетворяющий ограничениям на увеличение времени и длины пути разбега в диапазоне пониженных режимов с нижним пределом в виде либо режима малого газа, либо предельного пониженного режима, обеспечивающего отсутствие вихревого засасывания посторонних предметов, либо пониженного режима, соответствующего безусловному минимуму вероятности вихревого засасывания посторонних предметов, приходящейся на один взлет, в зависимости от того, на котором из указанных пониженных режимов частота вращения роторов выше всего, для осуществления взлета «с додачей» тяги при оптимальных значениях его кинематических параметров летчику сообщают расчетные значения частот вращения роторов авиадвигателей, соответствующих пониженному режиму работы силовой установки, и соответствующие ему значения времени и длины пути движения на этом пониженном режиме, обеспечивающие минимальную вероятность вихревого засасывания посторонних предметов, приходящуюся на один взлет, при соблюдении ограничений на время и длину пути разбега самолета при взлете и на диапазон пониженных режимов работы силовой установки.
2. Способ защиты самолетных маршевых авиадвигателей от вихревого засасывания посторонних предметов по п.1, отличающийся тем, что для силовой установки самолета, имеющей более одного маршевого авиадвигателя, характеризующихся различными значениями скоростей сдува вихревого шнура при одних и тех же режимах работы авиадвигателей, скорости сдува вихревого шнура силовой установки определяют в расчете на худший случай по тому маршевому авиадвигателю, у которого скорость сдува вихревого шнура наибольшая.
| WO 2011098711 А, 18.08.2011 | |||
| US 2004139726 A1, 22.07.2004 | |||
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 2006 |
|
RU2325307C1 |

