Предлагаемое изобретение относится к подъемно-транспортной технике, а именно к грузозахватным устройствам.
Известен челюстной захват (см. патент RU №2025447, кл. В66С 1/68), который удерживает груз за счет смыкания шарнирно закрепленных челюстей. Подводится такой захват к грузу при разведенных челюстях; однако, это не всегда возможно по причине затрудненного доступа захвата к месту его контакта с грузом. Например (см. патент RU №2317914, кл. В63В 27/100), для съема и крепления подводной части (блока) движительно-рулевого комплекса судна захват необходимо ввести в два параллельных щелевидных отверстия. В подобных случаях целесообразно использовать вилочный захват.
Наиболее близким техническим решением к предлагаемому изобретению является «Устройство для захвата грузов» (см. описание изобретения на 3 стр. к а.с. SU №1379225, кл. В66с 1/22). В этом изобретении предложен вилочный захват, содержащий балки (2) (зубья) жестко закрепленные на раме (1) (общем основании). На конце каждого зуба установлен удерживающий (ограничительный) рычаг (14), который с помощью привода может быть повернут в плоскости, перпендикулярной к продольной оси зуба. При вертикальном положении рычага относительно опорной поверхности зубьев он возвышается над этой поверхностью (плоскостью) и ограничивает смещение груза, размещенного на зубьях, по горизонтали.
Привод удерживающих рычагов выполнен в виде совокупности ряда деталей, в том числе ползуна; последний размещен в верхней части рамы.
Недостатком рассматриваемого устройства является то, что с помощью рычага можно создать «барьер» перемещению груза только в одном месте по длине зуба. При наличии просвета между грузом и рычагом может произойти смещение груза и, следовательно, нарушение режима его транспортировки. Другой недостаток устройства заключается в сложности (многозвенности) привода поворота рычага; следствием сложности является ненадежность привода.
Техническая задача, на решение которой направлено изобретение, заключается в упрощении конструкции и повышении надежности вилочного захвата с устройством для удержания груза.
Поставленная задача достигается тем, что у вилочного захвата, имеющего пару зубьев, оснащенного ползуном и удерживающими рычагами, согласно изобретению, ползун и рычаг соединены между собой тягой, размещены между зубьями и между уровнями их верхней и нижней стенок; а в основании зубьев установлен стопорный механизм для фиксирования положения ползуна. Кроме того, стопорный механизм выполнен в виде поворотного кулачка, связанного с упругим элементом и закрепленного с помощью горизонтальной оси на верхней стенке основания зубьев.
Предлагаемое изобретение поясняется чертежами.
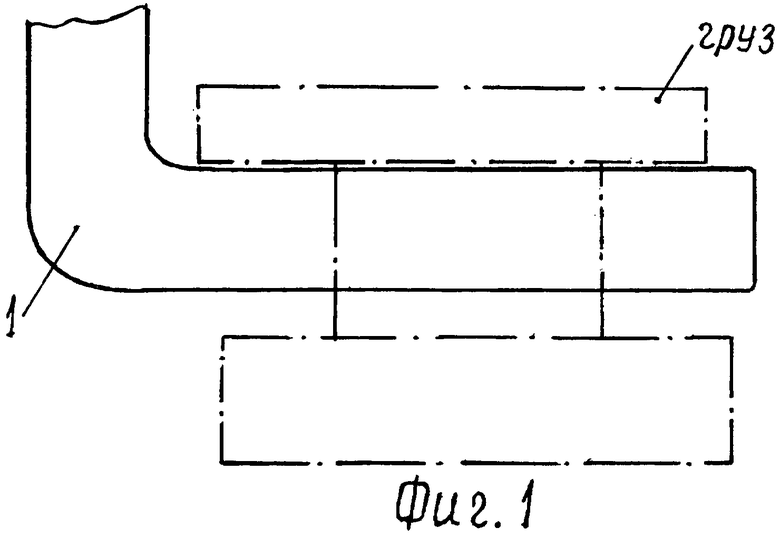
На фиг.1 показан вилочный захват с грузом, верхняя часть которого опирается на зубья. Часть груза имеет столбчатый по форме объем; последний располагается между двумя зубьями захвата (Контур груза условно показан штрихпунктирной линией).
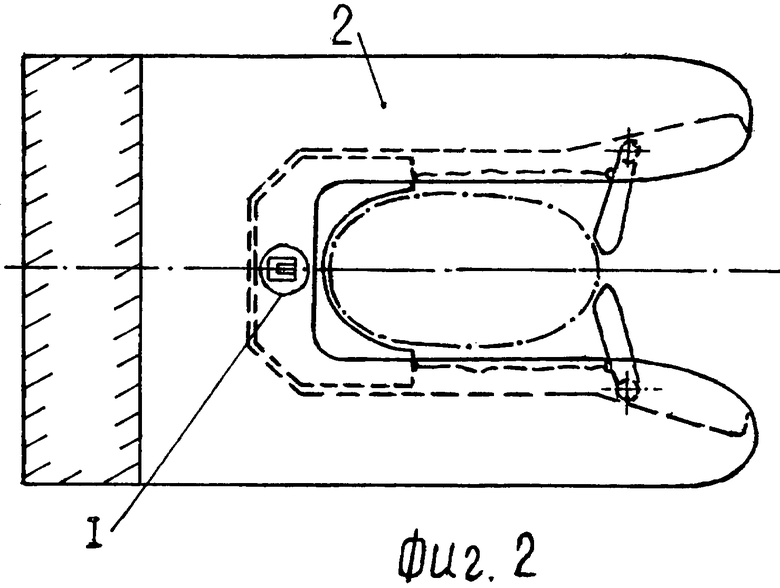
На фиг.2 представлен вид сверху на захват с грузом (показана только столбчатая часть груза).
На фиг.3 дан вид сверху вилочного захвата после его отделения от груза. В верхней стенке одного из зубьев сделан вырыв.
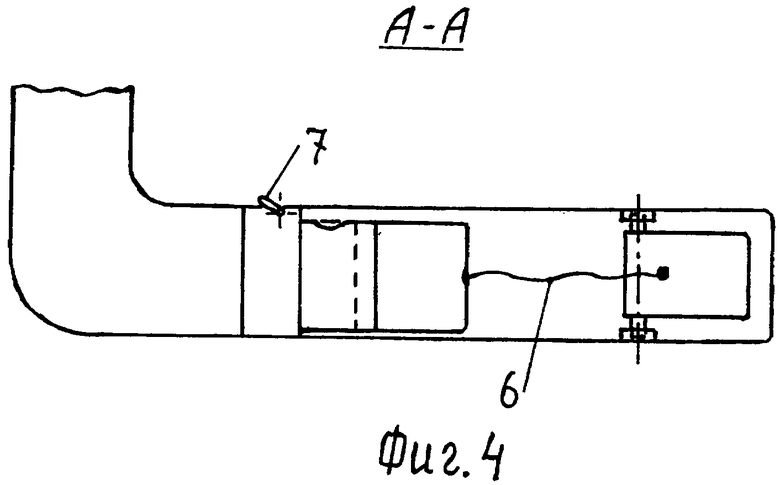
На фиг.4 изображен разрез по А-А фиг.3 (груз условно не показан).
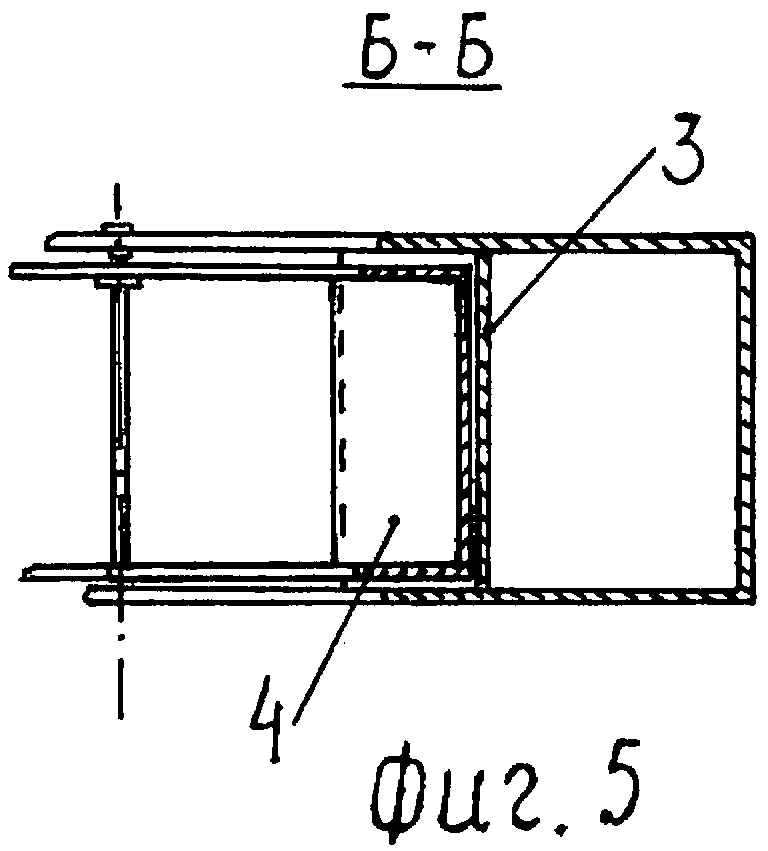
На фиг.5 дан разрез по Б-Б фиг 3 (с обрывом у плоскости симметрии захвата).
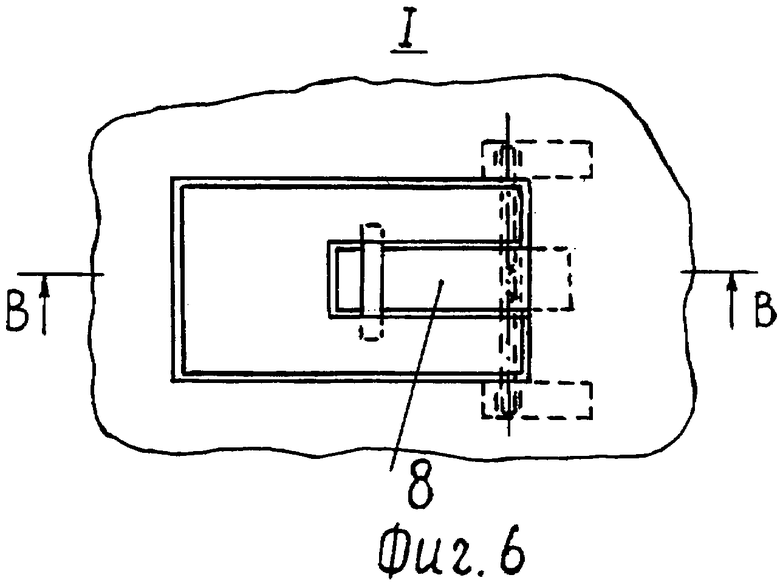
На фиг.6 представлен узел I фиг.3 (вид сверху на стопорный механизм в рабочем режиме).
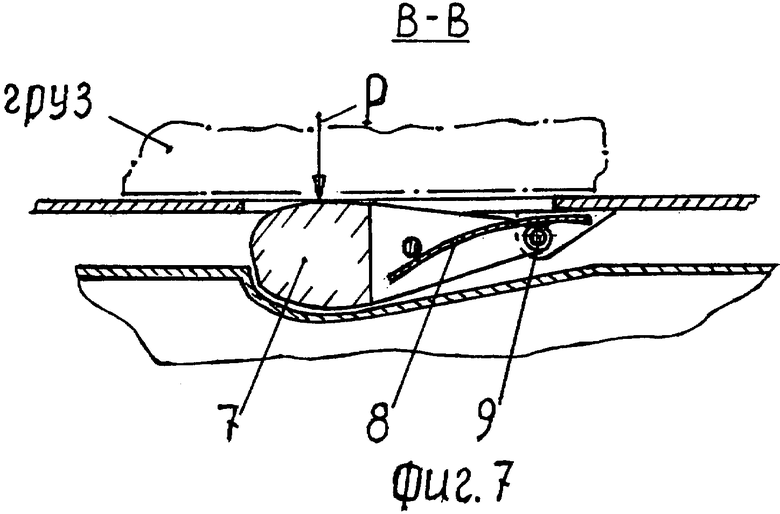
На фиг.7 дан разрез по В-В фиг.6 (показан груз, опирающийся на верхнюю стенку основания зубьев).
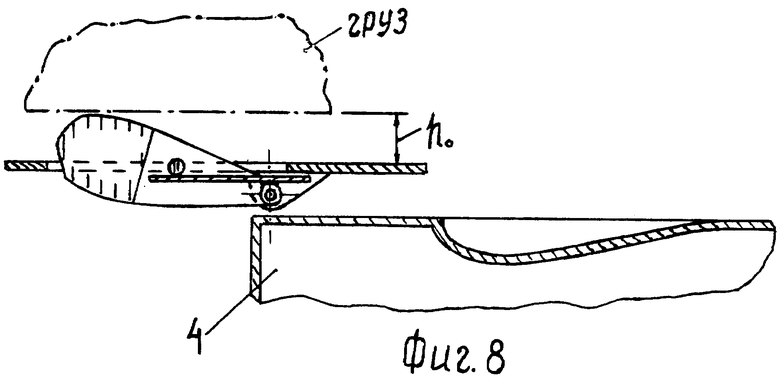
На фиг.8 представлен стопорный механизм в нерабочем режиме (соответствует состоянию стопорного механизма, показанному на фиг.3, 4).
Вилочный захват 7 с устройством для удержания груза включает два зуба 2. В объеме, ограниченном стенкой 3 каждого зуба 2 (фиг.3, 5) и уровнями верхней и нижней стенок зуба 2, размещены ползун 4, два удерживающих рычага 5 и две тяги 6, каждая из которых связывает рычаг 5 с ползуном 4 (фиг.3).
Ползун 4 перемещается вдоль зуба 2 по двум направляющим каналам, каждый из которых образован стенкой 3 и консольными участками верхней и нижней стенок зуба 2 (фиг.3, 5). У основания зуба 2 каждый из каналов замыкается на общий для них объем, находящийся между консольными участками верхней и нижней стенок основания зубьев 2.
Перемещение ползуна 4 в сторону основания зуба 2 происходит в процессе установки вилочного захвата в рабочее положение его относительно груза, т.е. в процессе относительного перемещения и оказываемого при этом давления столбчатой части груза на ползун 4. Конечное положение ползуна 4 представлено на фиг.2.
Одновременно с перемещением вдоль зуба 2 ползун 4, с помощью тяги 6, поворачивает вокруг оси рычаг 5, приближая его к грузу. В момент достижения ползуном 4 конечного положения рычаг 5 входит в контакт с поверхностью груза (фиг.2). В итоге столбчатая часть груза оказывается запертой (зажатой) между ползуном 4 и рычагами 5 (Форма поверхностей ползуна 4 и рычага 5, контактирующих с грузом, выполняется в соответствии с формой поверхности груза).
Устройство для удержания груза, которым снабжен вилочный захват 7, содержит также стопорный механизм (фиг.6, 7, 8). Он включает кулачок 7, закрепленный шарнирно на верхней стенке захвата 7 с возможностью его поворота в вертикальной плоскости. Кулачок 7 может занимать два положения:
- верхнее, при котором он возвышается над верхней стенкой захвата и не контактирует с ползуном 4 (условно нерабочее положение кулачка; фиг.3, 4, 8);
- нижнее положение, при котором кулачок 7 «утоплен» и контактирует с верхней стенкой ползуна 4, обеспечивая при этом стопорение ползуна 4 относительно захвата 1 (условно рабочее положение кулачка 7; фиг.2, 6, 7).
Стопорный механизм содержит упругий элемент, например пластинчатую пружину 8, которая посредством жестко связанной с ней втулкой удерживается на оси 9 кулачка 7 (фиг.7). Пружина 8 выводит кулачок 7 из рабочего положения по мере того, как увеличивается просвет (h) между поверхностью груза и поверхностью верхней стенки основания зуба 2, т.е. по мере уменьшения силы давления груза (Р) на кулачок (фиг.7, 8). При h≥h0 (фиг.8) кулачок 7 находится в нерабочем положении.
Для исключения проскальзывания в рабочем положении кулачка 7 относительно верхней стенки ползуна 4, последняя, в соответствующем месте, может быть выполнена, например, с углублением (фиг.3, 4, 7, 8).
Предложенный вилочный захват с устройством для удержания груза используется для перемещения груза, имеющего столбчатую часть и сопряженную с ней сверху посадочную горизонтальную поверхность этого груза. Выполняется перемещение груза следующим образом.
Захват 1 вводится в просветы в объеме груза таким образом, что его столбчатая часть перемещается вдоль и между зубьев 2 в сторону их основания (Исходное положение груза и захвата 1 даны на фиг.3). После появления контакта ползуна 4 с грузом, под давлением последнего, ползун 4 перемещается в сторону основания зубьев 2 и, одновременно с помощью тяг 6, поворачивает рычаги 5 вокруг их осей. При этом между посадочной поверхностью груза и верхней стенкой основания зуба 2, в месте расположения кулачка 7, должен обеспечиваться просвет не менее величины h0 (фиг.8).
После того как ползун 4 под действием груза окажется в конечном положении (фиг.2), захват 1 прижимается к опорной поверхности груза. В результате груз, воздействуя на кулачок 7 с силой Р (фиг.7), прижимает его к верхней стенке ползуна 4. Таким образом стопорится положение ползуна 4 и рычагов 5 относительно захвата 1 и, следовательно, фиксируется положение груза относительно захвата 1.
Затем груз, с использованием захвата 7, транспортируется и опускается на место назначения; одновременно снимается силовая нагрузка на основание зуба 2. Между верхней стенкой основания зуба 2 и поверхностью груза создается просвет, превышающий величину h0 (фиг.8), и кулачок 7 пружиной 8 перемещается в нерабочее (верхнее) положение. В результате ползун 4 и рычаги 5 выводятся из застопоренного состояния. Затем путем горизонтального перемещения захват 1 освобождается от груза (фиг.3).
После этого захват 1 может быть использован для перемещения другого груза.
Предложенный вилочный захват 1 с устройством для удержания груза отличается компактностью, простотой и надежностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СЪЕМА И КРЕПЛЕНИЯ ОБЪЕКТОВ НА КОРПУСЕ СУДНА | 2005 |
|
RU2317914C2 |
| СУДОВОЕ ЛЮКОВОЕ ЗАКРЫТИЕ | 2015 |
|
RU2591562C1 |
| СУХОГРУЗНОЕ СУДНО | 2013 |
|
RU2528515C1 |
| СУДОВОЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 2000 |
|
RU2182099C1 |
| СУДОВОЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 1998 |
|
RU2148523C1 |
| СУДОВОЕ ГРУЗОВОЕ УСТРОЙСТВО | 1992 |
|
RU2043251C1 |
| СУДОВОЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 2000 |
|
RU2172276C1 |
| РЕЖУЩЕЕ УСТРОЙСТВО СО СТОЛОМ | 2009 |
|
RU2494842C2 |
| СУДНО ДЛЯ СБОРА НЕФТИ С ПОВЕРХНОСТИ ВОДОЕМА | 2009 |
|
RU2397912C1 |
| Устройство для перемещения грузов | 1987 |
|
SU1411210A1 |
Изобретение относится к подъемно-транспортной технике и касается конструирования вилочного захвата. Захват содержит два зуба, оснащен устройством для удержания груза, которое включает ползун, размещенный между зубьями, два прижимных рычага, закрепленных шарнирно на стенках зубьев и связанных тягой с ползуном. Устройство содержит стопорный механизм, который выполнен в виде поворотного кулачка, закрепленного с помощью горизонтальной оси на верхней стенке захвата и связанного с упругим элементом. Достигается надежность вилочного захвата в эксплуатации. 1 з.п. ф-лы, 8 ил.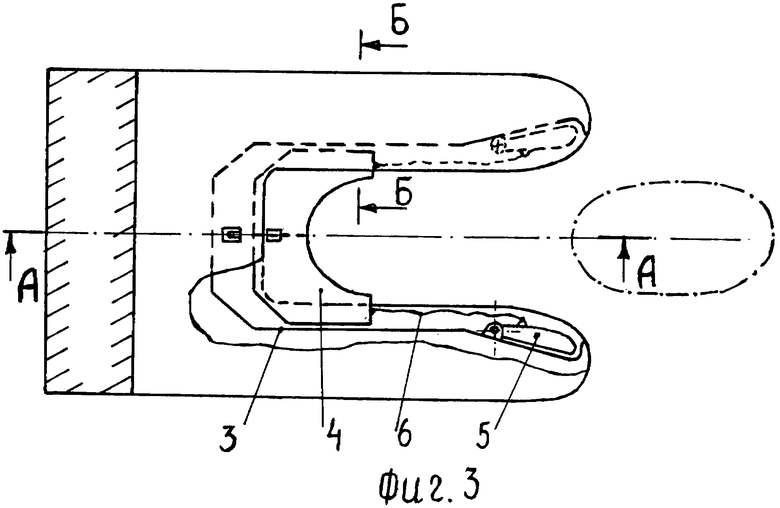
1. Вилочный захват с устройством для удержания груза, имеющий пару неподвижных зубьев с общим основанием, снабженный ползуном и удерживающими рычагами, каждый из которых закреплен на зубе, отличающийся тем, что ползун и рычаг соединены между собой тягой, размещены между зубьями и уровнями их верхней и нижней стенок, а в основании зубьев установлен стопорный механизм для фиксирования положения ползуна.
2. Вилочный захват по п.1, отличающийся тем, что стопорный механизм выполнен в виде поворотного кулачка, связанного с упругим элементом и закрепленного с помощью горизонтальной оси на верхней стенке основания зубьев.
| Вилочный захват для перемещения грузов | 1972 |
|
SU479716A1 |
| Устройство для захвата грузов | 1986 |
|
SU1379225A1 |
| Вилочный захват | 1982 |
|
SU1041483A2 |
| DE 102008023119 A1, 12.11.2009 | |||
| Вилочный захват | 1984 |
|
SU1261883A2 |

