3 поворачиваются до касания с ограничителями 10, а откидные рычаги 4, скользя по поверхности 7, переходят из горизонтального положения в вертикальное. После достижения оси 14 верхнего крайнего положения в пазах и образной серьги 11 начинается подъем захвата с грузом. Шарнирное соеди1283 нение серьги 11 посредством оси 13 обеспечивает серьге 11 всегда вертикальное положение независимо от положения захвата, что предотвращает заклинивание кольца 14, коромысла 15 и крюка 19 при их перемещении. Изобретение является дополнительным к авт. св. № 647227. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват | 1982 |
|
SU1041483A2 |
| ВСЕСОЮЗНАЯ I iATLfiTijO-iU.i;:'" Hri | 1973 |
|
SU365322A1 |
| Тележка для бобин | 1988 |
|
SU1569276A1 |
| Вилочный захват | 1981 |
|
SU962177A2 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1969 |
|
SU255518A1 |
| Захват для пакетированных грузов на поддонах | 1980 |
|
SU1030295A1 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| УРАВНОВЕШЕННЫЙ КРАНОВЫЙ ВИЛОЧНЫЙЗАХВАТ | 1971 |
|
SU420535A1 |
Изобретение относится к вилочному захвату, навешиваемому на подвеску грузоподъемной машины и отличается повышенной надежностью за счет исключения влияния формы опорной поверхности груза на подвижные элементы захвата. При подхватывании груза на вилы 3 и подъеме крюка 19 нагрузка на ось 14 увеличивается и передается через коромысло 15, трос 16 и пружины 18 вилам 3 в их верхней части. Под действием этой нагрузки пружины 8 сжимаются, а пружины 6 скручиваются. Вилы (Л ю 05 00 00 ОЭ к
I
Изобретение относится к подъемнотранспортному оборудованию., а именно к вилочному захвату, и является усовершенствованием изобретения по авт. св. № 647227.
Цель изобретения повьшение надежности.
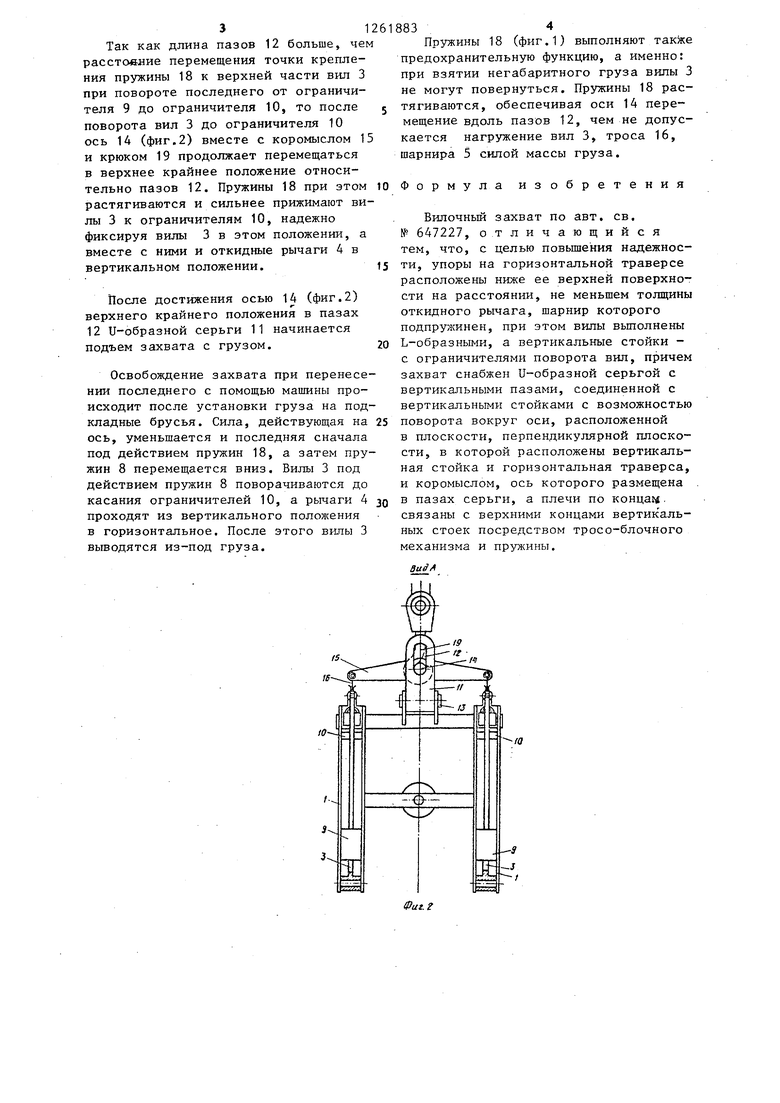
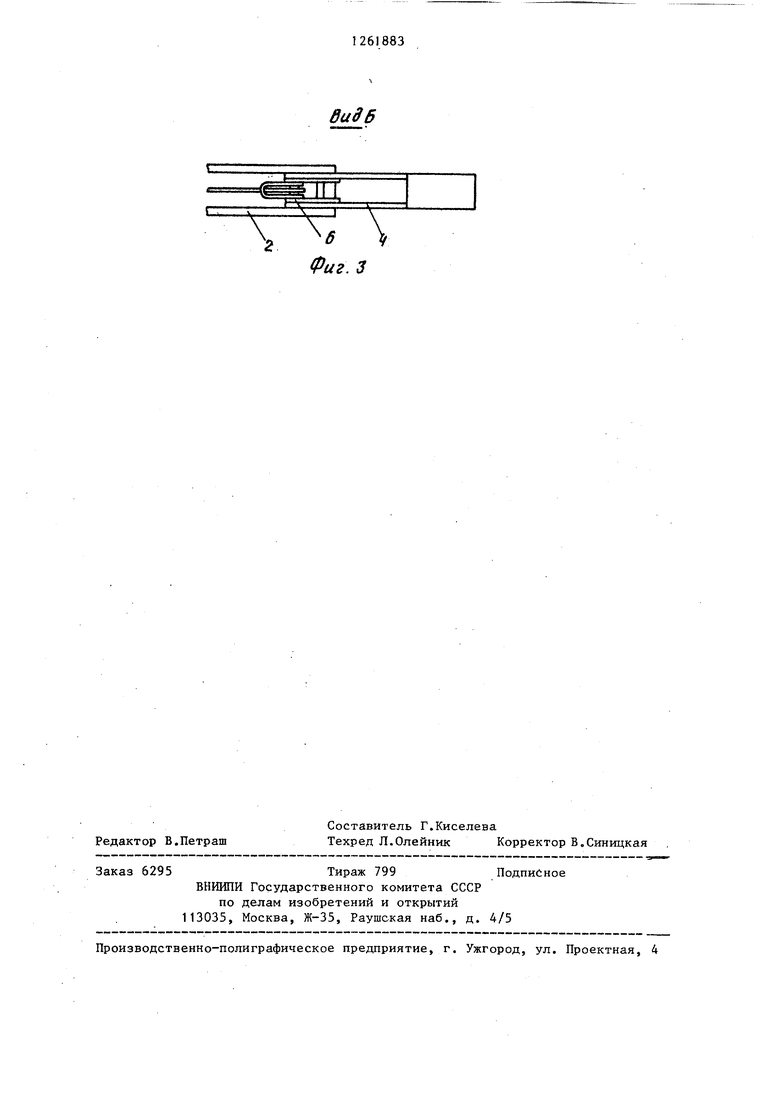
На фиг.1 изобралсен вилочный захват, вид сбоку; на фиг.2 вид А на фиг.1; на фиг.З - вид Б на фиг.1.
Вилочный захват содержит вертикальные стойки 1 с горизонтальной траверсой 2, на которой шарнщ гю закреплены выполненные L-образными вилы 3 с откидными рычагами 4, шарниры 5 которых снабжены пр ткиной 6. Откидные рычаги 4 взаимодействуют своей ншкней поверхностью с упором 7 на траверсе 2, выполненным цилиндрическим,, Пружина б стремится повернуть откидной рычаг 4 (фиг.1) в направлении по часовой стрелке, в результате; чего последний постоянно прижсат к ципиндрической поверхности упора 7.
Вилы 3 подпружинены относительно стоек 1 с помощью 8,, На стойках 1 выполнены ограничители 9 и 10 поворота вил 3. Упоры 7 расположепы на траверсе 2 ниже ее верхней поверхности на расстоянии, не меньшем тол-щины откидного рычага 4. Захват содержит также и-образную серьгу 11 с вертикальными пазами 12, соединенную со стойками 1 с возможностью поворота вокруг ее оси 13 (фиг„2)5 расположенной в плоскости, перпендикулярной плоскости, в которой расположены стойки 1 и горизонтальная траверса 2
В пазах 12 расположена ось 14 коромысла 15, плечи которого по их кондам связаны с верхними концами вил 3 посредством тросо-блочного механизма
трос 16 каждого из которых перекинут через блок 17 и через пружину 18 надет на конец соответствующей стойки и через блок.
Длина пазов 12 вьшолнена несколько большей, чем расстояние перемещения точки крепления пружины 18 к стойке 1 при повороте последней от ограничителя 9 к ограничителю 10.
Вилочный захват работает следующим образом.
Сила массы вил 3 без груза, действующая на ось 14 коромысла 15, от которого через трос 16 и пружины 18 на верхнюю часть вил 3, воспринимается пружинами 8 и пружинами 6 (фиг.З). Так как суммарные усилия пружины 8 и 6 равны силе массы захвата, то верхние части вил 3 находятся у ограничителей 9, а ось 14 - в нижнем положении.
Усилие пружин 18 значительно больше, чем суммарное усилие пружин В и
6,поэтому пр-ужину 18 в этом состояНИИ захвата можно рассматривать в сравнении с пружинами 8 и 6 как жесткое связующее звено между верхней частью вил 3 и тросом 16.
При подхватывании груза на вилы 3 и подъеме крюка 19 нагрузка на ось 14 увеличивается и передается через коромысло 15, трос 16 и пружины 18 вилам 3 в их верхней части. Под действием этой нагрузки пружины 8 сжимаются, а пружины 6 скручиваются. При этом вилы 3 поворачиваются до касания с ограничителем 10, а откидные рычаги 4, скользя по поверхности упоров
7,переходят из горизонтального положения в вертикальное, что предотвращает сползание груза с траверсы 2.
31
Так как длина пазов 12 больше, чем расстовние перемещения точки крепления пружины 18 к верхней части вил 3 при повороте последнего от ограничителя 9 до ограничителя 10, то после поворота вил 3 до ограничителя 10 ось 14 (фиг.2) вместе с коромыслом 15 и крюком 19 продолжает перемещаться в верхнее крайнее положение относительно пазов 12. 18 при этом растягиваются и сильнее прижимают вилы 3 к ограничителям 10, надежно фиксируя вилы 3 в этом положении, а вместе с ними и откидные рычаги 4 в вертикальном положении.
После достижения осью 14 (фиг.2) верхнего крайнего положения в пазах 12 и-образной серьги 11 начинается подъем захвата с грузом.
Освобождение захвата при перенесении последнего с помощью машины происходит после установки груза на подкладные брусья. Сила, действующая на ось, уменьшается и последняя сначала под действием пружин 18, а затем пружин 8 перемещается вниз. Вилы 3 под действием пружин 8 поворачиваются до касания ограничителей 10, а рычаги 4 проходят из вертикального положения в горизонтальное. После этого вилы 3 выводятся из-под груза.
8834
Пружины 18 (фиг.1) выполняют также предохранительную функцию, а именно: при взятии негабаритного груза вилы 3 не могут повернуться. Пружины 18 растягиваются, обеспечивая оси 14 перемещение вдоль пазов 12, чем не допускается нагружение вил 3, троса 16, шарнира 5 силой массы груза.
Формула изобретения
Вилочный захват по авт. св. № 647227, отличающийся тем, что, с целью повышения надежности, упоры на горизонтальной траверсе расположены ниже ее верхней поверхности на расстоянии, не меньшем толщины откидного рычага, шарнир которого подпружинен, при этом вилы вьшолнены L-образными, а вертикальные стойки с ограничителями поворота вил, причем захват снабжен U-образной серьгой с вертикальными пазами, соединенной с вертикальными стойками с возможностью поворота вокруг оси, расположенной в плоскости, перпендикулярной плоскости, в которой расположены вертикальная стойка и горизонтальная траверса, и коромыслом, ось которого размещена в пазах серьги, а плечи по концам, связаны с верхними концами вертикальных стоек посредством тросо-блочного механизма и пружины.
Видб
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
