Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях измерения координат малоразмерных движущихся целей.
Известно устройство автоматического слежения за дальностью, осуществляющее энергетическое взвешивание в двух стробах сигнала, отраженного от цели, содержащее два объединенных по выходу каскада совпадения, дифференциальный детектор, блок управления и устройство временной задержки (Цивлин И.П. Электронный автодальномер с двумя интеграторами. - М., Сов. радио, 1964, стр.9, рис.5). Устройства данного типа обладают малой точностью сопровождения цели по дальности в условиях воздействия пассивных помех.
Известно устройство автоматического сопровождения цели по дальности, осуществляющее фиксацию временного положения импульса, отраженного от цели (Митяшев Б.Н. Определение временного положения импульсов при наличии помех. - М., Сов. радио, 1962, стр.122, рис.37), содержащее ограничитель, дифференцирующий каскад и мультивибратор. Это устройство также обладает малой точностью сопровождения цели по дальности в условиях воздействия пассивных помех.
Наиболее близким по технической сущности к предлагаемому техническому решению является устройство автоматического сопровождения малоразмерной движущейся цели по дальности (Фельдман Ю.И., Гидаспов Ю.Б., Гомзин В.Н. Сопровождение движущихся целей / Под ред. Ю.И.Фельдмана. - М., Сов. радио, 1978, стр.242, рис.8.2), выбранное в качестве прототипа. Прототип содержит амплитудный детектор, вход которого подключен к первому (сигнальному) входу устройства, первую и вторую цепи, состоящие из последовательно соединенных соответствующего временного селектора, доплеровского фильтра и блока оценки амплитуды, последовательно соединенные первый блок сравнения, блок управления и генератор стробов, второй вход которого подключен к второму (синхронизирующему) входу устройства, а первый и второй выходы подключены к вторым входам соответственно первого и второго временных селекторов, при этом входы первой и второй цепи соединены с выходом амплитудного детектора, а первый и второй входы первого блока сравнения подключены к выходам соответственно первого и второго блоков оценки амплитуды.
Недостатком прототипа является низкая точность автоматического сопровождения малоразмерной движущейся цели по дальности вследствие влияния на работу радиолокатора пространственной неоднородности пассивных помех, принимаемых радиолокатором одновременно с сигналом малоразмерной движущейся цели, формируемых отражениями от элементарных отражателей (например, от поверхности Земли или облаков дипольных отражателей), пространственно совмещенных с целью. Подобные изменения пространственной неоднородности пассивных помех в реальных условиях предусмотреть невозможно и они связаны сложными зависимостями, что затрудняет теоретическое решение вопроса о компенсации влияния пространственной неоднородности пассивной помехи на процесс сопровождения малоразмерной движущейся цели по дальности и требует построения адаптивной системы.
Спектральные составляющие пассивной помехи на выходе амплитудного детектора устройства частично перекрываются с составляющими спектра малоразмерной движущейся цели. Для выделения обычно слабого сигнала малоразмерной движущейся цели из смеси с более мощной пассивной помехой в устройстве используются доплеровские фильтры, низкочастотные полосовые фильтры, пропускающие из спектра входного сигнала составляющие спектра сигнала цели, расположенные в полосе от Fmin до FП/2, где Fmin - нижняя граничная частота пропускания доплеровского фильтра, FП - частота повторения зондирующих импульсов и подавляющие низкочастотные составляющие спектра входного сигнала пассивной помехи с выхода амплитудного детектора, расположенные в полосе от 0 до Fmin.
Эти частично перекрывающиеся составляющие пассивной помехи с составляющими спектра малоразмерной движущейся цели, в соответствии с соотношением полосы пропускания доплеровских фильтров и ширины спектра пассивной помехи, проходят на выходы первого и второго доплеровских фильтров обоих каналов временной селекции и участвуют в образовании сигнала ошибки сопровождения на выходе первого блока сравнения, который обычно выполняет операцию вычитания, и, соответственно, в управлении временным положением стробов каналов временной селекции.
Когда импульс малоразмерной движущейся цели делится фронтом двух следящих стробов каналов временной селекции точно пополам, в результате чего общая мощность сигнала цели также делится следящими стробами на выходах первого и второго временных селекторов, которые обычно выполняются в виде ключа, первой и второй цепи поровну между каналами временной селекции, при этом дисперсии сигнала цели на выходах первого и второго доплеровских фильтров и, соответственно, сигналы на выходах первого и второго блоков оценки амплитуды обоих каналов временной селекции одинаковы и управляющий сигнал на выходе первого блока сравнения равен нулю ввиду отсутствия рассогласования временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции.
Если в процессе слежения, например, из-за взаимного перемещения в пространстве цели и радиолокатора возникает рассогласование временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции, и импульс малоразмерной движущейся цели не делится точно пополам фронтом следящих стробов каналов временной селекции, в результате чего общая мощность сигнала цели делится следящими стробами на выходах первого и второго временного селектора первой и второй цепи не поровну между каналами временной селекции, а пропорционально степени перекрытии тела импульса цели и соответствующего следящего строба, нарушается равенство дисперсий сигнала цели на выходах первого и второго доплеровских фильтров и, соответственно, сигналов на выходах первого и второго блоков оценки амплитуды обоих каналов временной селекции, что приводит к тому, что управляющий сигнал на выходе первого блока сравнения не равен нулю, его величина пропорциональна величине временного рассогласования, а знак определяется направлением рассогласования временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции.
В случае когда сигналы пассивных помех формируются пространственно однородными отражениями от элементарных отражателей, например от морской поверхности, а пассивные помехи имеют одинаковые мощности в первом и во втором каналах временной селекции, то на выходах первого и второго доплеровских фильтров обоих каналов временной селекции остатки пассивной помех будут иметь одинаковые мощности, и на выходе первого блока сравнения сигналы пассивных помех обоих каналов временной селекции в результате дадут нулевое значение напряжения, не влияющее на процесс слежения.
Однако в большинстве случаев пассивные помехи, интервал пространственной корреляции которых составляет единицы-десятки метров, попадающие в первый и во второй каналы временной селекции, даже при совпадении временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции, имеют различные интенсивности ввиду пространственной неоднородности удельных эффективных отражающих поверхностей, формирующих пассивные помехи в этих двух, прилегающих друг к другу по времени, каналах временной селекции. Дисперсия пространственно неоднородной пассивной помехи, попадающая в разные по времени открытия селекторные следящие стробы, может различаться на 30÷40 дБ. Например, для подстилающей поверхности Земли со смешенной шероховатостью при переходе от одного следящего строба к другому может изменяться одна из следующих характеристик - средняя комплексная диэлектрическая проницаемость поверхности в пределах 5÷15 дБ (поле-озеро), высота неровностей поверхности (поле - лес), угол наклона средней плоскости отражающей поверхности, что приводит к применению угла падения радиоволн (поле - горы).
Поэтому энергия остатков пассивных помех, просачивающаяся через первый доплеровский фильтр в первом канале временной селекции, отличается от энергии остатков пассивных помех на выходе второго доплеровского фильтра во втором канале временной селекции.
В результате на выходе первого блока сравнения кроме полезной информации о малоразмерной движущейся цели существует систематическая помеховая составляющая сигнала ошибки измерения рассогласования временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции, обусловленная разностью мощностей пассивных помех, проходящих через первый и второй доплеровские фильтры первого и второго каналов временной селекции. Наличие систематической помеховой составляющей сигнала ошибки измерения рассогласования временного положения импульса малоразмерной движущейся цели и фронтом следящих стробов каналов временной селекции приводит к возникновению случайной, обусловленной степенью локальной случайной непредсказуемой степенью неоднородности отражателей именно в этом месте пространства, где находится в текущий момент времени сопровождаемая цель, систематической помеховой составляющей ошибки сопровождения временного положения центра импульса цели фронтом селекторных импульсов стробов и, как следствие, к снижению точности автоматического сопровождения малоразмерной движущейся цели по дальности до 20-70% от длительности зондирующего импульса из-за систематической помеховой составляющей ошибки сопровождения.
Рассчитаны аналитические выражения для систематической помеховой составляющей ошибки сопровождения временного положения центра импульса цели фронтом селекторных импульсов стробов, нормированные к длительности зондирующего импульса τи, при квадратичном и линейном амплитудном детекторе Δк и Δл соответственно


где  - интеграл вероятности; Fв, Fн - соответственно верхняя и нижняя граничные частоты полосы пропускания доплеровских фильтров, σП(1,2) - дисперсии пассивных помех соответственно в канале первого и второго селекторных импульсов стробов;
- интеграл вероятности; Fв, Fн - соответственно верхняя и нижняя граничные частоты полосы пропускания доплеровских фильтров, σП(1,2) - дисперсии пассивных помех соответственно в канале первого и второго селекторных импульсов стробов;  - среднеквадратическое значение сигнала цели; ΔFП - ширина спектра междупериодных флюктуаций пассивной помехи на входе системы.
- среднеквадратическое значение сигнала цели; ΔFП - ширина спектра междупериодных флюктуаций пассивной помехи на входе системы.
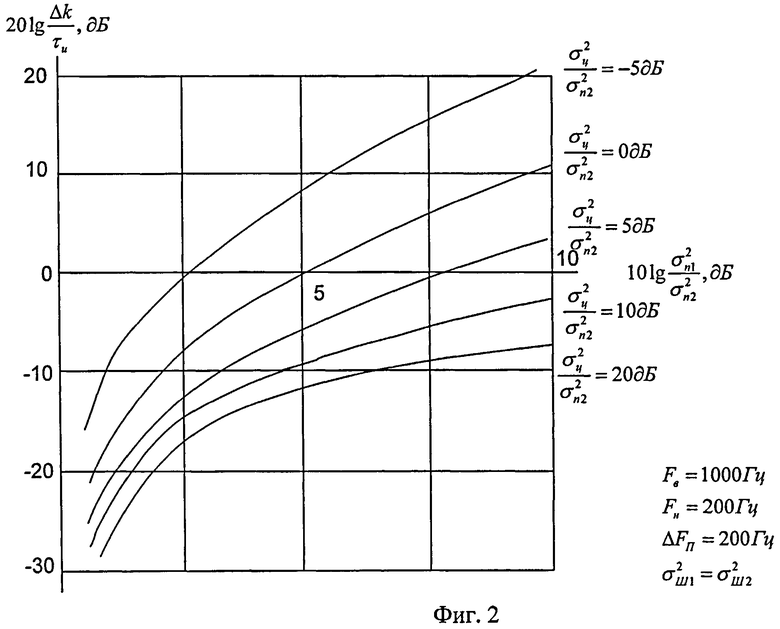
На фиг.2 представлены графические зависимости, рассчитанные по формулам (1), из которых видно существенное влияние пространственной неоднородности пассивных помех на величину систематической помеховой составляющей ошибки дальномера.
Задачей изобретения является повышение точности автоматического сопровождения малоразмерной движущейся цели по дальности с учетом влияния пространственной неоднородности пассивных помех.
Сущность изобретения заключается в следующем.
Предлагаемое устройство автоматического сопровождения цели по дальности содержит также, как и прототип, амплитудный детектор, вход которого подключен к первому входу устройства, первую и вторую цепи, состоящие из последовательно соединенных соответствующего временного селектора, доплеровского фильтра и блока оценки амплитуды, первый блок сравнения, первый и второй входы которого соединены с выходами первого и второго блоков оценки амплитуды соответственно первой и второй цепи, последовательно соединенные блок управления и генератор стробов, второй вход которого подключен ко второму входу устройства, а первый и второй выходы подключены ко вторым входам соответственно первого и второго временных селекторов, при этом входы первой и второй цепи соединены с выходом амплитудного детектора.
По отношению к прототипу предлагаемое устройство автоматического сопровождения цели по дальности дополнительно содержит последовательно соединенные третью и четвертую цепи, состоящие соответственно из последовательно соединенных первого фильтра нижних частот и третьего блока оценки амплитуды и последовательно соединенных второго фильтра нижних частот и четвертого блока оценки амплитуды, второй блок сравнения, первый и второй входы которого соединены с выходами третьего и четвертого блоков оценки амплитуды, блок вычитания, первый и второй входы которого соединены соответственно с выходами первого и второго блоков сравнения, а выход соединен с входом блока управления.
Технический результат от использования предлагаемого устройства - повышение точности слежения за дальностью малоразмерной движущейся цели достигается за счет снижения влияния пространственной неоднородности пассивных помех путем компенсации систематической помеховой составляющей сигнала ошибки измерения рассогласования временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции и, соответственно, компенсации ошибки смещения оценки дальности малоразмерной движущейся цели, обусловленной воздействием пассивной помехи, пространственно совмещенной с целью.
Дополнительно, в устройстве автоматического сопровождения цели по дальности в связи с компенсацией систематической помеховой составляющей сигнала ошибки измерения рассогласования повышается точность и надежность слежения за дальностью малоразмерной движущейся цели за счет снижения влияния флюктуационной составляющей сигнала ошибки измерения рассогласования временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции.
Повышение точности обусловлено тем, что исключается повышение величины флюктуационной составляющей сигнала на выходе дискриминатора устройства за счет исключения систематической помеховой составляющей сигнала ошибки измерения рассогласования, приводящей к смещению рабочей точки дискриминатора в ту или иную сторону от нуля, где величина флюктуационной составляющей сигнала рассогласования существенно выше, чем при нулевом значении дискриминационной характеристики. В свою очередь, исключение повышения величины флюктуационной характеристики в рабочей точке дискриминатора исключает повышение дисперсии флюктуационной составляющей сигнала рассогласования, и, соответственно, снижает вероятность срыва сопровождения цели.
Под срывом сопровождения понимается выход сигнала с выхода первого блока сравнения за пределы рабочего участка дискриминационной характеристики, определяемый как достижение ошибки измерения рассогласования величины, равной половине линейного участка дискриминационной характеристики Δ/2, что приводит к разрыву кольца автоматического сопровождения цели по дальности. В этом случае устройство автоматического сопровождения цели по дальности становится неспособным отслеживать возмущающие воздействия, величина ошибки слежения непрерывно растет, и система сопровождения цели становится неуправляемой.
Для нормального закона плотности вероятности сигнала ошибки на выходе дискриминатора для вероятности срыва слежения, например Рср=10-4, допустимая величина среднеквадратического отклонения сигнала ошибки измерения рассогласования ориентировочно равна  .
.
Предлагаемое устройство автоматического сопровождения цели по дальности позволяет производить точное и надежное сопровождение малоразмерной движущейся цели по дальности с учетом того, что в результате сравнения дисперсий остатков пассивных помех, выделяемых во введенных первом и втором фильтрах нижних частот обоих каналах временной селекции, во втором блоке сравнения, вырабатывается компенсирующая поправка сигнала ошибки слежения цели по дальности, возникающая на выходе первого блока сравнения в результате неравенства мощностей пассивных помех в каналах временной селекции устройства.
Сущность изобретения поясняется чертежами, где
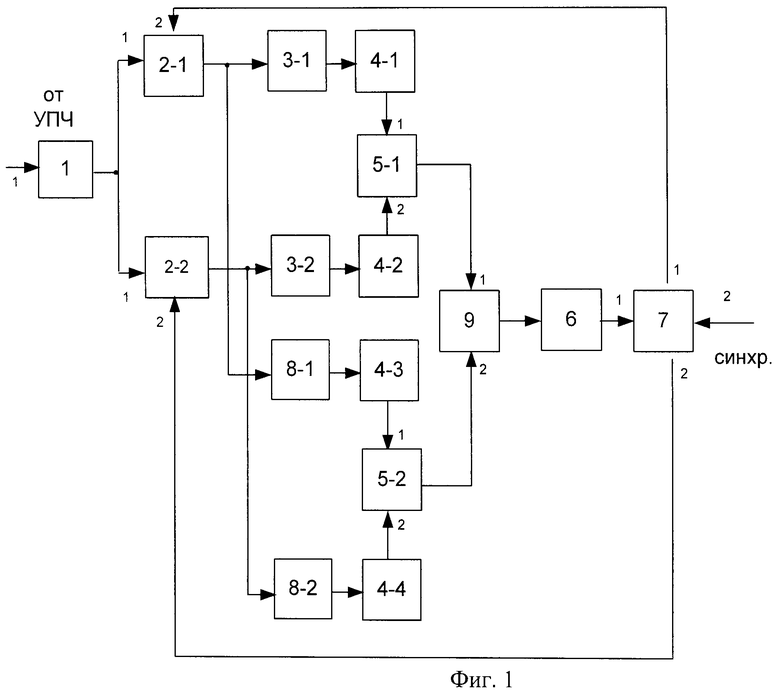
на фиг.1 представлена структурная электрическая схема предлагаемого устройства автоматического сопровождения цели по дальности, где обозначено:
1 - амплитудный детектор;
2-1, 2-2 - первый и второй временной селектор первой и второй цепи соответственно;
3-1, 3-2 - первый и второй доплеровский фильтр первой и второй цепи соответственно;
4-1, 4-2 - первый и второй блок оценки амплитуды первой и второй цепи соответственно;
4-3, 4-4 - третий и четвертый блок оценки амплитуды третьей и четвертой цепи соответственно;
5-1,5-2 - первой и второй блоки сравнения;
6 - блок управления;
7 - генератор стробов;
8-1, 8-2 - первой и второй фильтры нижних частот;
9 - блок вычитания.
На фиг.2 представлены графические зависимости от соотношений дисперсий пассивных помех соответственно в каналах первого и второго стробов систематической ошибки, нормированные к длительности зондирующего импульса τи, в прототипе при квадратичном Δк и линейном Δл детектировании в амплитудном детекторе на выходе УПЧ, где Fв, Fн
- соответственно верхняя и нижняя граничные частоты полосы пропускания доплеровского фильтра, σ2 П(1,2) - дисперсии пассивных помех соответственно в каналах первого и второго временного селектора; - дисперсия сигнала цели; ΔFП - ширина спектра межпериодных флюктуации пассивной помехи на выходе УПЧ.
Предлагаемое устройство автоматического сопровождения цели по дальности (фиг.1) содержит также, как и прототип, амплитудный детектор 1, вход которого подключен к первому входу устройства, первую и вторую цепи, состоящие из последовательно соединенных соответствующего временного селектора 2, доплеровского фильтра 3 и блока оценки амплитуды 4, первый блок сравнения 5-1, первый и второй входы которого соединены с выходами первого 4-1 и второго 4-2 блоков оценки амплитуды соответственно первой и второй цепи, последовательно соединенные блок управления 6 и генератор стробов 7, второй вход которого подключен к второму входу устройства, а первый и второй выходы подключены к вторым входам соответственно первого 2-1 и 2-2 второго временных селекторов, при этом входы первой и второй цепи соединены с выходом амплитудного детектора 1.
В отличие от прототипа, в предлагаемое устройство автоматического сопровождения цели по дальности введены последовательно соединенные третья и четвертая цепи, состоящие соответственно из последовательно соединенных первого фильтра нижних частот 8-1, и третьего блока оценки амплитуды 4-3, и последовательно соединенных второго фильтра нижних частот 8-2, и четвертого блока оценки амплитуды 4-4, второй блок сравнения 5-2, первый и второй входы которого соединены с выходами третьего 4-3 и четвертого 4-4 блоков оценки амплитуды соответственно третьей и четвертой цепи, блок вычитания 9, первый и второй входы которого соединены соответственно с выходами первого 5-1 и второго 5-2 блоков сравнения, а выход соединен с входом блока управления 6.
Работа предлагаемого устройства автоматического сопровождения цели по дальности осуществляется следующим образом.
Сигнал с выхода усилителя промежуточной частоты (УПЧ) приемного устройства поступает на первый вход устройства, т.е. на вход амплитудного детектора 1, с выхода которого сигнал одновременно поступает на первые (сигнальные) входы первого 2-1 и второго 2-2 временных селекторов первой и второй цепи обоих каналов временной селекции. С выходов первого 2-1 и 2-2 второго временных селекторов во время действия импульсов стробов по вторым входам этих временных селекторов сигналы цели и помехи подаются соответственно на входы первого 3-1 и второго 3-2 доплеровских фильтров, который из спектра поступившего сигнала вырезает спектральные составляющие в полосе от Fmin до FП/2.
Для выделения сигнала движущейся цели в первой и второй цепи обоих каналов временной селекции используются доплеровские фильтры 3, вырезающие из спектра входного сигнала составляющие спектра сигнала цели, расположенные в полосе Fmin до F П /2, где Fmin - нижняя граничная частота пропускания доплеровского фильтра, FП - частота повторения зондирующих импульсов.
Первый 4-1 и второй 4-2 блоки оценки амплитуды соответственно первой и второй цепи формируют оценки амплитуды сигналов, поступающих с выходов первого 3-1 и второго 3-2 доплеровских фильтров. Сигнал на выходе первого 4-1 и второго 4-2 блоков оценки амплитуды каждого канала временной селекции пропорционален мощности сигнала цели и мощности остатка пассивной помехи, спектральные составляющие которой попадают в полосу пропускания первого 3-1 и второго 3-2 доплеровских фильтров, которые прошли в каналы временной селекции через первый 2-1 и второй 2-2 временной селектор за время действия импульсов стробов.
Сигналы с выходов первого 4-1 и второго 4-2 блоков оценки амплитуды обеих цепей подаются соответственно на первый и второй входы первого 5-1 блока сравнения. На выходе первого 5-1 блока сравнения в результате сравнения сигналов первого и второго каналов временной селекции появляется напряжение сигнала ошибки, пропорциональное разности мощностей сигналов на выходах первого 4-1 и второго 4-2 блоков оценки амплитуды первой и второй цепей каналов временной селекции. При одинаковых мощностях пассивных помех, прошедших на выход первого 3-1 и второго 3-2 доплеровских фильтров каналов временной селекции, сигнал ошибки с выхода первого 5-1 блока сравнения пропорционален только рассогласованию временного положения центра сигнала цели и центра селекторных импульсов стробов.
Однако в большинстве случаев пассивные помехи, попадающие в первый и во второй каналы временной селекции, имеют различные интенсивности ввиду различия удельных эффективных отражающих поверхностей, формирующих пассивные помехи в этих каналах временной селекции. Поэтому энергия остатков пассивных помех, просачивающаяся через первый 3-1 и второй 3-2 доплеровские фильтры каналов временной селекции, в первом канале временной селекции (опережающем) отличается от энергии остатков помех во втором канале временной селекции (запаздывающем).
В результате на выходе первого 5-1 блока сравнения кроме полезной информации о цели, существует систематическая помеховая составляющая сигнала ошибки измерения, обусловленная разностью мощностей пассивных помех, проходящих через первую и вторую цепи каналов временной селекции. Наличие сигнала систематической помеховой составляющей ошибки измерения приводит к возникновению систематической помеховой ошибки рассогласования временного положения центра импульса цели и центра селекторных импульсов стробов временной селекции и, как следствие, к снижению точности автоматического сопровождения цели по дальности, особенно при слежении за малоразмерной движущейся целью на пересеченной местности или применения средств противодействия.
Сигнал с выхода первого 5-1 блока сравнения поступает на первый вход блока вычитания 9.
Для снижения влияния сигнала систематической помеховой составляющей ошибки измерения, приводящей к возникновению систематической помеховой ошибки рассогласования временного положения центра импульса цели и центра селекторных импульсов стробов временной селекции и повышению точности автоматического сопровождения цели по дальности, выполняется оценка этой систематической помеховой составляющей ошибки измерения и ее исключение при формировании результирующего управляющего сигнала положением центра селекторных импульсов стробов временной селекции.
Для этого сигналы с выходов первого 2-1 и второго 2-2 временных селекторов первой и второй цепи обоих каналов временной селекции одновременно поступают соответственно на входы первого фильтра нижних частот 8-1 и второго фильтра нижних частот 8-2, вырезающие из спектра входного сигнала низкочастотные составляющие спектра сигнала с выхода амплитудного детектора 1, расположенные в полосе от 0 до Fmin, где Fmin - нижняя граничная частота пропускания доплеровского фильтра.
Эти блоки (8-1 и 8-2) выделяют мощности соответствующих спектральных составляющих пассивных помех, попадающих в первый и второй каналы временной селекции, с выходов которых сигналы подаются на входы третьего 4-3 и четвертого 4-4 блоков оценки амплитуды соответственно третьей и четвертой цепи, которые формируют оценки амплитуд сигналов, поступающих с выходов первого 8-1 и второго 8-2 фильтров нижних частот. Сигналы пассивных помех с выходов третьего 4-3 и четвертого 4-4 блоков оценки амплитуды третьей и четвертой цепи подаются соответственно на первый и второй входы второго 5-2 блока сравнения.
На выходе второго 5-2 блока сравнения в результате сравнения сигналов третьей и четвертой цепи первого и второго каналов временной селекции появляется сигнал, пропорциональный разности мощностей сигналов на выходах третьего 4-3 и четвертого 4-4 блоков оценки амплитуды третьей и четвертой цепи каналов временной селекции.
В случае равенства мощностей пассивных помех в каналах временной селекции выходной сигнал второго 5-2 блока сравнения равен нулю. В случае неравенства мощностей пассивных помех в каналах временной селекции из-за различия их интенсивности, ввиду различия удельных эффективных отражающих поверхностей, формирующих пассивные помехи в этих каналах временной селекции, выходной сигнал второго 5-2 блока сравнения не равен нулю, а пропорционален неравенству мощностей пассивных помех в каналах временной селекции и формируется оценка систематической помеховой составляющей ошибки измерения на выходе первого 5-1 блока сравнения.
Сигнал с выхода второго 5-2 блока сравнения, пропорциональный разности соответствующих мощностей пассивных помех и оценке систематической помеховой составляющей ошибки измерения на выходе первого 5-1 блока сравнения, подается на второй вход блока вычитания 9.
В блоке вычитания 9 производится вычитание из сигнала, поступающего с выхода первого 5-1 блока сравнения, сигнала компенсации систематической ошибки измерения, поступающего с выхода второго 5-2 блока сравнения. Вычитание сигнала с выхода второго 5-2 блока сравнения производится с его масштабированием на втором входе блока вычитания 9.
Масштабирование производится, например, соответствующим входным делителем напряжения, стоящим на втором входе (вычитаемого) блока вычитания 9, рассчитанным с учетом известной аппроксимации формы спектра пассивных помех и значений граничных частот пропускания первого 3-1 и второго 3-2 доплеровских фильтров первой и второй цепи и первого 8-1 и второго 8-2 фильтров нижних частот третьей и четвертой цепи обоих каналов временной селекции.
В результате на выходе блока вычитания 9 формируется сигнал ошибки сопровождения временного положения центра импульса цели фронтом селекторных импульсов стробов без систематической помеховой составляющей, что увеличивает точность автоматического сопровождения цели по дальности.
Далее сигнал ошибки сопровождения временного положения центра импульса цели фронтом селекторных импульсов стробов подается на вход блока управления 6, который управляет временным положением импульсов стробов временной селекции, вырабатываемых генератором стробов 7.
Генератор стробов 7 вырабатывает селекторные импульсы первого (опережающего) и второго (отстающего), задержанного на длительность импульса относительно начала первого, импульсов стробов, например прямоугольной формы, причем длительность стробов обычно равна длительности зондирующих импульсов, а их фронт при точном сопровождении цели должен совпадать с энергетическим центром тяжести импульса от цели, что и осуществляется непрерывно с помощью всей радиолокационной системы. Генератор стробов 7 синхронизируется импульсами, поступающими на его второй вход со второго входа устройства, например от общего синхронизатора радиолокатора, для осуществления привязки моментов формирования селекторных импульсов стробов к временной задержке отраженного от цели сигнала относительно момента излучения антенной зондирующего импульса.
Сигнал ошибки сопровождения временного положения центра импульса цели фронтом селекторных импульсов стробов на выходе блока вычитания 9 изменяет управляющее напряжение на выходе блока управления 6, поступающее на вход генератора стробов 7, воздействуя таким образом на временное положение селекторных импульсов стробов, чтобы временное рассогласование положения центра сигнала цели и центра селекторных импульсов стробов свести к нулю, и, соответственно, свести сигнал ошибки слежения на входе блока управления 6 к нулю. Селекторные импульсы стробов, вырабатываемые генератором стробов 7, поступают на вторые (селекторные) входы первого 2-1 и второго 2-2 временных селекторов первой и второй цепи каналов временной селекции.
В дальнейшем рассмотренные процессы сопровождения временного положения центра импульса цели фронтом селекторных импульсов стробов происходят непрерывно по рассмотренному алгоритму.
В прототипе низкая точность автоматического сопровождения малоразмерной движущейся цели по дальности обусловлена систематической ошибкой измерения, нормированные значения которой приведены на фиг.2, вызванной пространственной неоднородностью мощностей пассивных помех, пространственно совмещенных с целью, в каналах первого (опережающего) и второго (задержанного) селекторных импульсов стробов. В большинстве случаев пассивные помехи, попадающие в первый и второй селекторные импульсы стробы имеют различные интенсивности ввиду различия удельных эффективных отражающих поверхностей, формулирующих пассивные помехи в соответствующих стробах. Поэтому дисперсия остатков пассивных помех, проходящих через первый 3-1 доплеровский фильтр, в канале первого селекторного импульса строба отличаются от дисперсии остатков пассивных помех, проходящих через второй 3-2 доплеровский фильтр в канале второго селекторного импульса строба. В результате на выходе первого 5-1 блока сравнения кроме полезной информации о временном положении импульса малоразмерной движущейся цели, существует помеховый сигнал систематической ошибки измерения, обусловленный разностью дисперсий пассивных помех, проходящих через первый 3-1 и второй 3-2 доплеровские фильтры каналов первого и второго селекторных импульсов стробов. Наличие сигнала систематической ошибки измерения приводят к возникновению ошибки рассогласования временного положения центра принятого сигнала малоразмерной движущейся цели и фронта селекторных импульсов стробов и, как следствие, снижению точности автоматического сопровождении по дальности малоразмерной движущейся цели.
Предлагаемое устройство увеличивает точность автоматического сопровождения цели по дальности на 20-70% от длительности зондирующего импульса путем компенсации систематической ошибки измерения, вызванной неравенством мощностей пассивных помех в каналах стробов и позволяет это сделать путем ввода новых, промышленно легко изготавливаемых по широко известным схемам блоков и введением дополнительных связей между блоками. Одновременно, в устройстве автоматического сопровождения цели по дальности в связи с компенсацией систематической помеховой составляющей сигнала ошибки измерения рассогласования повышается точность и надежность слежения за дальностью малоразмерной движущейся цели за счет снижения влияния флюктуационной составляющей сигнала ошибки измерения рассогласования временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции.
Предлагаемое устройство обладает существенными преимуществами по сравнению с аналогами при автоматическом сопровождении цели по дальности в условиях воздействия пассивных помех.
При интенсивном развитии современной гражданской и военной техники повышение точности автоматического сопровождения цели по дальности в условиях пассивных помех является актуальной задачей и говорит о перспективности применения предложенного устройства автоматического сопровождения цели по дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АВТОМАТИЧЕСКОГО СЛЕЖЕНИЯ ЗА ДАЛЬНОСТЬЮ | 2011 |
|
RU2463623C1 |
| СЛЕДЯЩИЙ ФИЛЬТР СИГНАЛА ДВИЖУЩЕЙСЯ ЦЕЛИ | 2004 |
|
RU2252432C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛИ ПО НАПРАВЛЕНИЮ | 2010 |
|
RU2427854C1 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| СЛЕДЯЩИЙ ФИЛЬТР СИГНАЛА ДВИЖУЩЕЙСЯ ЦЕЛИ | 2004 |
|
RU2252431C1 |
| АВТОНОМНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2013 |
|
RU2533659C1 |
| ДАЛЬНОМЕРНЫЙ КАНАЛ РАДИОЛОКАЦИОННОЙ СТАНЦИИ СОПРОВОЖДЕНИЯ С РАННИМ ОБНАРУЖЕНИЕМ УВОДЯЩЕЙ ПО ДАЛЬНОСТИ ПОМЕХИ | 1999 |
|
RU2170443C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ ОТ "АНГЕЛОВ" ПРИ КОМПЛЕКСИРОВАНИИ РЛС РАЗНЫХ ДИАПАЗОНОВ | 2017 |
|
RU2666783C1 |
| СЛЕДЯЩИЙ ФИЛЬТР СИГНАЛА ДВИЖУЩЕЙСЯ ЦЕЛИ | 2004 |
|
RU2252433C1 |
Изобретение может быть использовано в радиолокационных станциях измерения координат малоразмерных движущихся целей. Заявленное устройство содержит амплитудный детектор, первую и вторую цепи, состоящие из последовательно соединенных соответствующего временного селектора, доплеровского фильтра и блока оценки амплитуды, третью и четвертую цепи, состоящие соответственно из последовательно соединенных первого фильтра нижних частот и третьего блока оценки амплитуды и последовательно соединенных второго фильтра нижних частот и четвертого блока оценки амплитуды, первый и второй блоки сравнения, блок вычитания, блок управления, генератор стробов. Достигаемый технический результат - повышение точности слежения за дальностью малоразмерной движущейся цели. Указанный результат достигается за счет компенсации помеховой составляющей сигнала ошибки измерения рассогласования временного положения импульса малоразмерной движущейся цели и фронта следящих стробов каналов временной селекции, обусловленной воздействием пассивной помехи, пространственно совмещенной с целью. 2 ил.
Устройство автоматического сопровождения цели по дальности, содержащее амплитудный детектор, вход которого подключен к первому входу устройства, первую и вторую цепи, состоящие из последовательно соединенных соответствующего временного селектора, доплеровского фильтра и блока оценки амплитуды, первый блок сравнения, первый и второй входы которого соединены с выходами первого и второго блоков оценки амплитуды соответственно первой и второй цепи, последовательно соединенные блок управления и генератор стробов, второй вход которого подключен к второму входу устройства, а первый и второй выходы подключены к вторым входам соответственно первого и второго временных селекторов, при этом входы первого и второго временных селекторов первой и второй цепи соединены с выходом амплитудного детектора, отличающееся тем, что в него введены третья и четвертая цепи, состоящие соответственно из последовательно соединенных первого фильтра нижних частот и третьего блока оценки амплитуды и последовательно соединенных второго фильтра нижних частот и четвертого блока оценки амплитуды, второй блок сравнения, первый и второй входы которого соединены с выходами третьего и четвертого блоков оценки амплитуды соответственно третьей и четвертой цепи, блок вычитания, первый и второй входы которого соединены соответственно с выходами первого и второго блоков сравнения, а выход соединен с входом блока управления, при этом выходы первого и второго временных селекторов соединены с входами соответственно первого и второго фильтров нижних частот третьей и четвертой цепей.
| ФЕЛЬДМАН Ю.И | |||
| и др | |||
| Сопровождение движущихся целей | |||
| - М.: Советское радио, 1978, с.242, рис.8.2 | |||
| СЛЕДЯЩИЙ ФИЛЬТР СИГНАЛА ДВИЖУЩЕЙСЯ ЦЕЛИ | 2004 |
|
RU2252432C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ С ВЫСОКОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2004 |
|
RU2262715C1 |
| US 3868687 A, 25.02.1975 | |||
| US 3986187 A, 12.10.1976 | |||
| Способ определения количества золы в золоцементном материале | 1983 |
|
SU1158927A1 |
| JP 2011149962 A, 04.08.2011. | |||

