Предлагаемое автономное радиолокационное устройство селекции воздушной цели относится к радиолокационным средствам ближнего действия, в частности к бортовым радиолокационным устройствам боеприпасов, взаимодействующих на траектории с воздушными объектами наблюдения (целями) и повышающих помехоустойчивость в условиях действия различных пассивных помех.
Такие устройства предназначены, главным образом, для обеспечения повышенной помехоустойчивости к пассивным помехам радиолокаторов ближнего действия (РБД) боеприпасов в условиях отсутствия априорных сведений о месте и времени появления реальной цели при относительно коротком времени взаимодействия РБД с обнаруженным воздушным объектом.
Радиолокационные устройства селекции воздушных целей на малых расстояниях (под "малыми" понимаются расстояния, соизмеримые с геометрическими размерами цели [1, 2]), могут быть использованы для решения задач не только применительно к боеприпасам, но и во многих других случаях, когда при встрече РБД летательного аппарата с несколькими воздушными целями возникает проблема выделения из них только одной, определяемой как действительной цели, на фоне ряда ложных. Так, например, в космических аппаратах предлагаемое устройство может применяться для обнаружения реальных объектов на фоне посторонних предметов, т.н. "космического мусора" [3]. Аналогичные задачи могут решаться и в других случаях.
Селекция воздушной цели на фоне пассивных помех устройствами дальней радиолокации имеет ряд особенностей, исключающие их применение при решении подобных проблем в ближней радиолокации, в частности в боеприпасах. К ним, в первую очередь, относятся следующие:
Во-первых, в таких радиолокационных устройствах используется относительно сложная и большеразмерная антенная система с фазовым управлением углового сканирования - фазовая антенная решетка (ФАР) с двумерным электронным сканированием по углу места и азимуту [4].
Во-вторых, в таких радиолокационных устройствах, согласно принципу их действия, требуется использование импульсной модуляции зондирующего сигнала с большой скважностью (1000-2000 и более), применение которой исключается в радиолокаторах ближнего действия из-за кратковременности траекторного взаимодействия встречных объектов на малых расстояниях. В радарах ближнего действия может использоваться импульсная последовательность с малой скважностью в пределах 2-50 [1].
В-третьих, в таких радиолокационных устройствах траекторным информационным параметром, кроме дальности и пеленга, является скорость сближения, величина которой рассчитывается вычислителем как производная величина от изменения дальности, на вычисление которой затрачивается относительно большое время, чем ограничивается быстродействие всей поисковой радиолокационной системы [2], что не позволяет их использовать в радиолокационных устройствах ближнего и кратковременного действия.
Таким образом, основными недостатками существующих радиолокационных устройств селекции воздушной цели на малых расстояниях являются:
- громоздкость и сложность антенных систем;
- большая скважность зондирующих импульсных сигналов;
- повышенное время вычислений скорости сближения объектов.
Из известных радиолокационных устройств селекции воздушной цели наиболее близким по технической сущности является радиолокационное устройство, описанное в патенте "Способ сопровождения траектории цели" (прототип) [5].
Это радиоустройство содержит антенну, устройство управления лучом антенны, генератор радиочастоты, антенный переключатель, приемник, синхронизатор и вычислитель.
Главными недостатками такого устройства является:
1) необходимость применения относительно сложной и большеразмерной антенной системы с фазовым управлением угла места и азимута двумерным электронным сканированием (фазовая антенная решетка - ФАР);
2) необходимость применения зондирующего импульсного сигнала с высокой скважностью;
3) относительно большая продолжительность вычислений скорости сближения объектов;
4) повышенная опасность использования такого РБД в боеприпасах из-за отсутствия в нем предохранительно-исполнительного механизма, приводящего по команде РБД в действие огневую цепь боеприпаса.
Предлагаемое изобретение позволяет:
- обнаруживать одну реальную цель на фоне пассивных помех упрощенной фазоуправляемой антенной в одной угломестной плоскости;
- использовать сигнал передатчика импульсами малой скважности;
- непрерывно получать сведения о скорости сближения объектов;
- достигать необходимый уровень эффективности действия боеприпаса в условиях действия пассивных помех;
- обеспечивать с высокой степенью безопасности РБД в служебном обращении и безошибочном подрыве боеприпаса на траектории его полета в условиях действия пассивных помех.
Техническим результатом предлагаемого автономного радиолокационного устройства селекции воздушной цели является возможность обнаружения на ограниченных расстояниях одной воздушной цели на фоне различных пассивных помех, простота технической реализации, высокоэффективное и безопасное действие устройства в малоразмерных летательных аппаратах.
Технический результат устройства достигается тем, что в устройство, содержащее приемопередающую антенну, устройство управления лучом антенны, генератор радиочастоты, антенный переключатель и вычислитель, введены: модулятор; смеситель; сумматор сигнала; первый и второй усилитель мощности; фильтр доплеровских частот; преобразователь частоты импульсного сигнала; детектор; регистратор скорости; регистратор дальности; тактовый генератор; первый, второй и третий регистры дальности; первый, второй и третий регистры скорости; счетчик импульсов; логический элемент «И-НЕ»; логический элемент «НЕ» и предохранительно-исполнительное устройство.
Особенностью предлагаемого устройства является то, что, во-первых, в нем используется генератор непрерывной немодулированной радиочастоты, часть сигнала которого, после усиления усилителем, излучается в пространство антенной через антенный переключатель. При наличии в пространстве объекта, отраженным от него сигналом по частоте Доплера производится оценка скорости сближения РБД боеприпаса с этим объектом.
Во-вторых, часть радиосигнала генератора непрерывных колебаний модулируется модулятором в виде коротких радиоимпульсов, которые затем усиливаются другим усилителем и так же излучаются в пространство антенной через тот же антенный переключатель. Процесс измерений дальности и скорости сближения производится в сформированном РБД стробе дальности, положение и размер которого определяется величиной допустимого промаха при встрече боеприпаса с воздушной целью, который, в свою очередь, связан со свойством боеприпаса - его величиной "трубки промахов" (допустимого промаха, на котором поражающие элементы боеприпаса с наивысшей вероятностью могут поразить данную цель [6, 7]).
Отраженные от цели импульсные радиосигналы поступают на вход РБД и при достижении заданного расстояния, определяемого стробом дальности, на выходе регистратора дальности появляется импульсный сигнал, а на выходе регистра скорости появится сигнал доплеровской частоты.
Для повышения точности регистрации дальности (положения цели в стробе) с распознаванием цели по скорости сближения с РБД производится формирование трех стробов дальности, чем исключается неопределенность оценки положения цели, вызванной одновременным появлением ее в двух смежных стробах.
Решение об обнаружении реальной цели принимается вычислителем только в случае появления отраженного сигнала в одном из трех или в двух смежных стробах и при этом скорость сближения РБД с целью соответствует ожидаемому диапазону скоростей. Так как принимается условие, что элементы пассивных помех могут быть либо неподвижными (например, посторонними сооружениями) либо медленно движущимися переизлучателями (например, в виде облака легких металлизированных отражателей, движущихся со скоростью ветра), поэтому с учетом того, что вектор реальной цели по отношению к РБД движется со скоростью 
 , тогда результирующий вектор скоростей сближения РБД с реальной целью будет определяться скоростями движения РБД боеприпаса и самой цели
, тогда результирующий вектор скоростей сближения РБД с реальной целью будет определяться скоростями движения РБД боеприпаса и самой цели
 .
.
При отсутствии быстродвижущейся цели 
 , в результате чего вычислителем принимается решение об отсутствии цели.
, в результате чего вычислителем принимается решение об отсутствии цели.
Решение о наличии цели в стробе будет положительным только в случае, когда вектор результирующей скорости сближения будет не ниже ожидаемой скорости встречи боеприпаса с РБД относительно реальной цели
 .
.
Процесс вычисления скоростей сближения  с достаточной точностью производится в вычислителе по доплеровской частоте
с достаточной точностью производится в вычислителе по доплеровской частоте 
 [1], так что
[1], так что
 ,
,
где n - выбираемое для измерений число периодов частоты Доплера (выбирается в пределах n=5-7 [1]); 

а с учетом того, что частота Доплера оценивается по формуле [1]
 ,
,
тогда вычислителем определяется скорость сближения по формуле
 ,
,
где λ - длина волны зондирующего сигнала РБД.
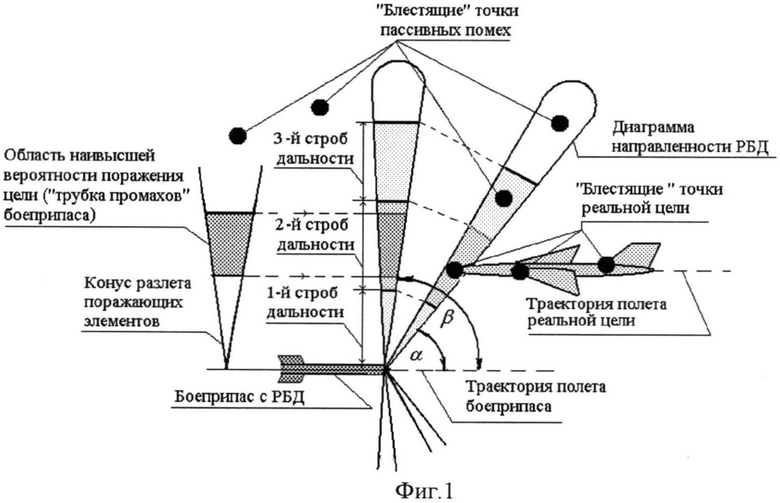
На фиг.1 представлен вариант возможного взаимодействия автономного радиолокационного устройства ближнего действия (РБД) боеприпаса с воздушной целью в условиях действия пассивных помех, на которой показано, что модель отраженных пассивных помех, как и любой реальной воздушной цели, можно представить в виде отдельных "блестящих" точек поверхности отражателя [8], от которых отраженные сигналы попадают на вход РБД.
Начало стробирования производится при исходном, первоначально установленном угле наклона диаграммы направленности антенны α (фиг.1).
Сигналами, поступающими в РБД, образованные отражениями поверхности отражателя одной или несколькими "блестящими" точками, обнаруженных в одном из трех стробов дальности, фиксируется численная величина дальности до объекта (до "блестящей" точки), а по доплеровской частоте определяется скорость сближения РБД с обнаруженным объектом.
Затем эти сигналы поступают на вычислитель, в котором они обрабатываются с учетом априори известных величин:
- путевая скорость полета боеприпаса,
- ожидаемый диапазон путевых скоростей реальных воздушных целей,
- диапазон предельно допустимых траекторных промахов боеприпаса определяемый его параметром
- "трубкой промахов".
После регистрации наличия в стробе отраженных сигналов, характеризующих дальность и скорость встречи с препятствием, производится фазовое изменение угла наклона диаграммы направленности антенны от угла α до угла β (см. фиг.1), после которого повторяется цикл измерений дальности до объекта и скорости с ним встречи, в результате чего вычислителем принимается решение о наличии или отсутствии реальной цели.
Так, например, если сигнал в стробе по доплеровской частоте соответствует скорости сближения РБД с неподвижным (или медленно движущимся) объектом, тогда вычислителем принимается решение об отсутствии цели, при этом принятый сигнал принимается помеховым. Процесс поиска цели продолжается.
Появление отраженного сигнала в стробе, который характеризуется по доплеровской частоте как отраженный от быстродвижущегося объекта, приводит к решению о его возможном отражении от реальной цели, в результате чего вычислителем выдается сигнал на сброс имеющихся сведений (о дальности до цели и скорости сближения с ней) и фазовым изменением угла наклона диаграммы направленности антенны РБД - от угла α до угла β, при котором производится повторный одноразовый процесс обнаружения цели.
Выбор величин дальномерных стробов производится в соответствии с дальномерной величиной "трубки промахов" боеприпаса. Изменение угла наклона диаграммы направленности антенны (угла β) выбирается из условия его согласования с конусом разлета элементов поражения цели (фиг.1) [6, 7].
Предлагаемая структурная схема радиолокационного устройства автономной селекции воздушной цели приведена на фиг.2, на которой обозначено:
1 - генератор радиочастоты, 2 - модулятор, 3 - смеситель, 4 - сумматор сигнала, 5 - антенный переключатель, 6 - приемопередающая антенна, 7 - первый усилитель мощности, 8 - второй усилитель мощности, 9 - фильтр доплеровской частоты, 10 - преобразователь частоты импульсного сигнала, 11 - детектор, 12 - регистратор скорости, 13 - регистратор дальности, 14 - тактовый генератор, 15 - первый регистр дальности, 16 - второй регистр дальности, 17 - третий регистр дальности, 18 - первый регистр скорости, 19 - второй регистр скорости, 20 - третий регистр скорости, 21 счетчик импульсов, 22 логический элемент «И-НЕ», 23 логический элемент «НЕ», 24 вычислитель, 25 устройство управления лучом антенны 26 предохранительно-исполнительный механизм.
Радиолокационное устройство автономной селекции воздушной цели содержит: генератор радиочастоты 1, модулятор 2, смеситель 3, сумматор 4, антенный переключатель 5, приемопередающую антенну 6, первый усилитель мощности 7, второй усилитель мощности 8, фильтр доплеровской частоты 9, преобразователь частоты импульсного сигнала 10, детектор 11, регистратор скорости 12, регистратор дальности 13, тактовый генератор 14, первый регистр дальности 15, второй регистр дальности 16, третий регистр дальности 17, первый регистр скорости 18, второй регистр скорости 19, третий регистр скорости 20, счетчик импульсов 21, логический элемент «И-НЕ» 22, логический элемент «НЕ» 23, вычислитель 24, устройство управления лучом антенны 25, предохранительно исполнительное устройство 26 таким образом, что первый выход генератора радиочастоты 1 соединен с входами модулятора 2, первого усилителя мощности 7 и первым сигнальным входом смесителя 3, выход модулятора 2 соединен с входом второго усилителя мощности 8, выход которого соединен с первым входом сумматора сигнала 4, второй вход которого соединен с выходом первого усилителя мощности 7, выход сумматора сигнала соединен с первым входом антенного переключателя 5 с которого сигнал поступает на приемопередающую антенну 6, выход антенного переключателя 5 соединен со вторым сигнальным входом смесителя 3, третий вход которого соединен с выходом второго усилителя мощности 8, выход смесителя 3 соединен с входами фильтра доплеровских частот 9 и преобразователя частоты 10, выход фильтра доплеровских частот 9 соединен с первым входом регистратора скорости 12, выход преобразователя частоты импульсного сигнала 10 соединен с входом детектора 11, выход которого соединен с первым входом регистратора дальности 13, выход которого соединен с информационными входами первого 15, второго 16 и третьего 17 регистров дальности, выход регистратора скорости 12 соединен с третьими входами первого регистра скорости 18, второго регистра скорости 19 и третьего регистра скорости 20, выход тактового генератора 14 соединен с вторыми входами регистратора скорости 12 и регистратора дальности 13, а так же первым входом счетчика импульсов 21, три выхода счетчика импульсов 21 соединены с соответствующими тремя входами логического элемента «И-НЕ» 22 и при этом, первый выход счетчика импульсов 21 соединен с первым входом разрешения записи первого регистра дальности 15 и первым входом разрешения записи первого регистра скорости 18, второй выход счетчика импульсов 21 соединен с первым входом разрешения записи дальности второго регистра дальности 16 и с первым входом разрешения записи второго регистра скорости 19, третий выход счетчика импульсов 21 соединен с первым входом разрешения записи дальности третьего регистра дальности 17 и с первым входом разрешения записи третьего регистра скорости 20, выход логического элемента «И-НЕ» 22 соединен с входом логического элемента «НЕ» 23 и со вторыми входами разрешения чтения первого регистра дальности 15, второго регистра дальности 16, третьего регистра дальности 17, первого регистра скорости 18, второго регистра скорости 19, третьего регистра скорости 20, а информационные выходы первого регистра дальности 15, второго регистра дальности 16, третьего регистра дальности 17, первого регистра скорости 18, второго регистра скорости 19 и третьего регистра скорости 20 соединены, соответственно, с первым, вторым, третьим, четвертым, пятым и шестым входами вычислителя 24, выход логического элемента «НЕ» 23 соединен со вторым входом (сброса) счетчика импульсов 21, первый выход вычислителя 24 соединен с входом устройства управления лучом антенны 25 и вторым входом тактового генератора 14, выход устройства управления лучом антенны 25 соединен со вторым входом антенного переключателя 5, второй выход вычислителя 24 соединен с входом предохранительно-исполнительного механизма 26.
Генератор радиочастоты 1 формирует непрерывный сигнал, часть которого преобразовывается в короткие импульсы малой скважности в модуляторе 2, которые затем усиливаются во втором усилителе мощности 8 и поступают на первый вход сумматора 4, с выхода которого импульсный сигнал малой скважности излучается в пространство приемо-передающей антенной 6 через антенный переключатель 5. От генератора радиочастоты 1 непрерывный сигнал поступает также на первый усилитель мощности 7, с выхода которого сигнал поступает на второй вход сумматора 4, с выхода которого непрерывный сигнал также излучается в пространство приемопередающей антенной 6 через антенный переключатель 5. При наличии воздушного объекта отраженный от него сигнал поступает через приемопередающую антенну 6 и антенный переключатель 5 на сигнальный вход 2 смесителя 3. На первый гетеродинный вход 1 смесителя 3 с выхода генератора радиочастоты 1 поступает немодулированный сигнал, а на второй гетеродинный вход 3 смесителя 3 поступает сигнал с выхода второго усилителя мощности 8. С выхода смесителя 3 сигнал поступает на фильтр доплеровских частот 9, откуда он поступает на первый информационный вход регистратора скорости 12,с выхода которого сигнал, пропорциональный частоте Доплера 
Формирование трех стробов производится сигналами тактового генератора 14. Управление совместным измерением дальностей и скоростей по частотам Доплера в каждом отдельном стробе, соответственно 


Работа устройства при отсутствии пассивных помех и обнаружении реальной цели в одном из трех стробов дальности сводится к следующему. В первый дискретный момент времени t1, при запуске тактового генератора 14 подачей на его вход команды включения "Пуск" информационный сигнал о формировании первого строба дальности (первой текущей дальности R1 до наблюдаемого объекта) появляется только на выходе первого регистра 15, а затем во второй момент времени t2 информационный сигнал о формировании второго строба дальности (второй текущей дальности R2 до наблюдаемого объекта) появляется только на выходе второго регистра дальности 16, в третий момент времени t3 информационный сигнал о формировании третьего строба дальности (третей текущей дальности R3 до наблюдаемого объекта) появляется только на выходе третьего регистра дальности 17.
При обнаружении цели в первый дискретный момент времени t1 определяемый тактовым генератором 14 информационный сигнал о первой текущей частоте Доплера 


Сигнал с первого разрядного выхода счетчика импульсов 21 поступает на первый вход логического элемента «И-НЕ» 22, на первый вход разрешения записи первого регистра дальности 15 и на первый вход разрешения записи первого регистра скорости 18. Сигнал со второго разрядного выхода счетчика импульсов 21 поступает на второй вход логического элемента «И-НЕ» 22, на первый вход разрешения записи второго регистра дальности 16 и на первый вход разрешения записи второго регистра скорости 19. Сигнал с третьего разрядного выхода счетчика импульсов 21 поступает на третий вход логического элемента «И-НЕ» 22, на первый вход разрешения записи третьего регистра дальности 17 и на первый вход разрешения записи третьего регистра скорости 20.
С выхода логического элемента «И-НЕ» 22 сигнал поступает на вход логического элемента «НЕ» 23 и вторые входы разрешения чтения первого регистра дальности 15, второго регистра дальности 16, третьего регистра дальности 17, первого регистра скорости 18, второго регистра скорости 19 и третьего регистра скорости 20.
Информационные выходы первого регистра дальности 15, второго регистра дальности 16, третьего регистра дальности 17, первого регистра скорости 18, второго регистра скорости 19 и третьего регистра скорости 20 соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами вычислителя 24, у которого наличие выходного сигнала на втором выходе характеризует факт обнаружения реальной цели. На втором выходе вычислителя 24 не будет сигнала при отсутствии, в пределах дистанционных стробов, цели и помехи, при этом сигнал будет отсутствовать как на выходе регистратора скорости 12, так и на выходе регистратора дальности 13, не будет его и на выходах первого регистра дальности 15, второго регистра дальности 16 и третьего регистра дальности 17, на выходах первого регистра скорости 18, второго регистра скорости 19 и третьего регистра скорости 20. Это состояние регистрируется вычислителем 24 путем вычисления значений дальности и скорости сближения РБД с воздушными объектами.
При наличии только пассивных помех (при отсутствии реальной цели) сигнал появляется последовательно во всех стробах, но вычислителем 24 этот факт регистрируется как обнаружение помехи, образованной неподвижным или медленно движущимся объектом, создающим сигнал с пониженным значением доплеровской частоты, и на втором выходе вычислителя 24 сигнала не будет.
При наличии цели в отсутствии помех, сигнал появится на выходе регистратора дальности 13, он будет и на выходах первого регистра дальности 15, второго регистра дальности 16 и третьего регистра дальности 17. Появится сигнал также на выходе регистратора скорости 12, в результате чего он будет на выходах первого регистра скорости 18, второго регистра скорости 19 и третьего регистра скорости 20. С учетом появившегося значения сигнала доплеровской частоты при обнаружении реальной цели вычислителем 24 этот факт регистрируется как наличие объекта в пределах одного из трех стробов и с первого выхода вычислителя 24 поступает сигнал на вход устройства управления лучом антенны 25, выход которого соединен со вторым входом антенного переключателя 5, при этом угол наклона диаграммы направленности изменяется. Одновременно, с первого выхода вычислителя 24 сигнал поступает на второй вход тактового генератора 14, чем вызывается сброс всех предшествующих измерений и цикл работы в одноразовом режиме повторяется. При измененном угле наклона диаграммы направленности антенны и повторном режиме измерений дальномерных и скоростных характеристик реальной цели, она будет обнаружена в том же стробе дальности, что и при первом измерении, вызывая повторное появление сигнала на первом выходе вычислителя 24, чем вызывается появление сигнала на его втором выходе, тем самым на вход предохранительно-исполнительного механизма 26 поступает исполнительная команда, обеспечивающая подрыв боеприпаса.
Литература
1. Коган И.М. Ближняя радиолокация (теоретические основы). М., Сов радио. 1973. 272 с.
2. Радиолокационные устройства (теория и принципы построения). Васин В.В., Власов О.В., Григорин-Рябов В.В., Дудник П.И., Степанов Б.М. М.: Сов. радио, 1970, 680 с.
3. С.С. Вениаминов. Космический мусор. Угроза человечеству. 2-е изд. Под ред. P.P. Назарова, О.Ю. Аксенова. Изд. Механика, управление и информатика. М.: 2013.
4. Хижа Г.С., Вендик И.Б., Серебрякова Е.А. СВЧ-фазовращатели и переключатели: Особенности создания на p-i-n диодах в интегральном исполнении. М.: Радио и связь, 1984, 184 с.
5. Патент РФ №2463622 С1 "Способ сопровождения траектории цели". Заявка 2011123394.07. 08.06.2010 (прототип).
6. Дорофеев А.Н. Взрыватели ракет. М.: ВИ МО СССР, 1963, стр.55.
7. Петухов С.И., Степанов А.Н. Эффективность ракетных средств ПВО. М.: ВИ МО СССР, 1974, стр.44.
8. Розовский В.Б. Статистические характеристики группового времени запаздывания для совокупности рассеивателей // Радиотехника и электроника. - 1971. - №11 - С.2105-2109.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО АВТОНОМНОЙ РАДИОЛОКАЦИОННОЙ САМОКОРРЕКЦИИ ПРОМАХА ПРИ ВСТРЕЧЕ МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ОБЪЕКТОМ НА ЗАКЛЮЧИТЕЛЬНОМ УЧАСТКЕ ТРАЕКТОРИИ ПОЛЕТА | 2012 |
|
RU2533660C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ВСТРЕЧИ АКТИВНОГО РАДИОЛОКАТОРА С СОСРЕДОТОЧЕННОЙ ВОЗДУШНОЙ ЦЕЛЬЮ | 2005 |
|
RU2292562C2 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492503C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРОТЯЖЕННОЙ ПО СКОРОСТИ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2359285C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СЛУЧАЙНОГО СТОЛКНОВЕНИЯ САМОЛЕТОВ С ГОРНОЙ МЕСТНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236695C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВСТРЕЧИ АКТИВНОГО РАДИОЛОКАТОРА С СОСРЕДОТОЧЕННОЙ ВОЗДУШНОЙ ЦЕЛЬЮ | 2005 |
|
RU2290661C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2204108C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2286529C2 |
Изобретение относится к радиолокационным средствам ближнего действия. Достигаемый технический результат - повышение помехоустойчивости к пассивным помехам радиолокаторов ближнего действия (РБД) в условиях отсутствия априорных сведений о месте и времени появления реальной цели при относительно коротком времени взаимодействия с обнаруженным воздушным объектом. Указанный результат достигается тем, что используется генератор непрерывной немодулированной радиочастоты, часть сигнала которого, после усиления усилителем, излучается антенной через антенный переключатель в пространство. При наличии в пространстве объекта по отраженному от него сигналу производится оценка скорости сближения РБД боеприпаса с объектом по частоте Доплера, при этом часть радиосигнала генератора непрерывных колебаний модулируется модулятором в виде коротких радиоимпульсов, которые затем усиливаются другим усилителем и также излучаются в пространство антенной через тот же антенный переключатель. Отраженные от объекта непрерывные и импульсные радиосигналы поступают на вход РБД устройства, позволяя оценить как дальность до объекта, так и скорость сближения РБД с этим объектом. Процесс измерений дальностей и скоростей сближения производится в сформированных в РБД трех стробах дальности. Решение о наличии реальной цели в пространстве принимается устройством только в случае появления отраженного сигнала в любом одном из трех или в двух соседних стробах, при котором скорость сближения соответствует ожидаемому диапазону скоростей сближения с реальной целью. 2 ил.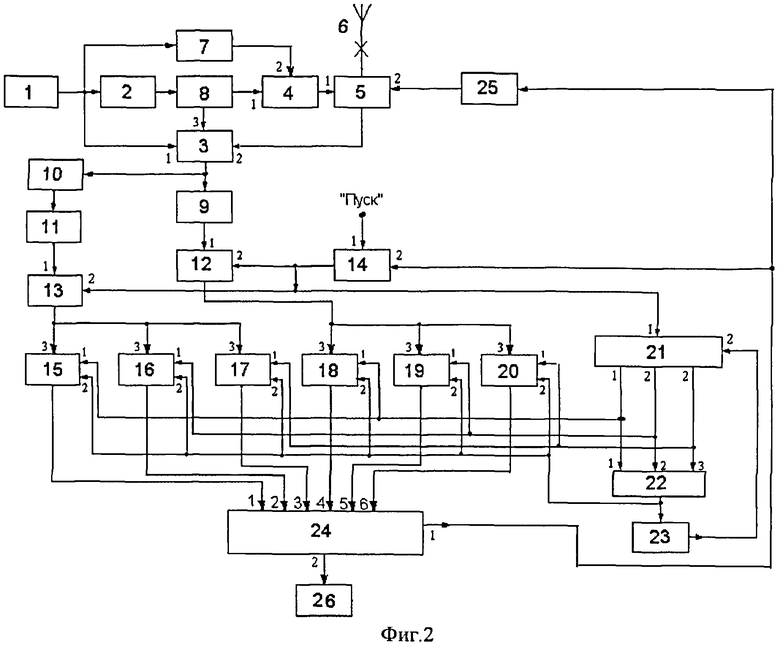
Автономное радиолокационное устройство селекции воздушной цели, содержащее приемопередающую антенну, устройство управления лучом антенны, генератор радиочастоты, антенный переключатель и вычислитель, отлчающееся тем, что введены: модулятор, смеситель, сумматор сигнала, первый усилитель мощности, второй усилитель мощности, фильтр доплеровской частоты, преобразователь частоты импульсного сигнала, детектор, регистратор скорости, регистратор дальности, тактовый генератор, первый регистр дальности, второй регистр дальности, третий регистр дальности, первый регистр скорости, второй регистр скорости, третий регистр скорости, счетчик импульсов, логический элемент «И-НЕ», логический элемент «НЕ», предохранительно-исполнительное устройство таким образом, что первый выход генератора радиочастоты соединен с входами модулятора, первого усилителя мощности и смесителя, выход модулятора соединен с входом второго усилителя мощности, выход которого соединен с первым входом сумматора сигнала, второй вход которого соединен с выходом первого усилителя мощности, выход сумматора сигнала соединен с первым входом антенного переключателя, с первого выхода которого сигнал поступает на приемопередающую антенну, второй выход антенного переключателя соединен со вторым сигнальным входом смесителя, третий вход которого соединен с выходом второго усилителя мощности, выход смесителя соединен с входом фильтра доплеровской частоты и преобразователем частоты импульсного сигнала, выход фильтра доплеровской частоты соединен с первым входом регистратора скорости, выход преобразователя частоты импульсного сигнала соединен с входом детектора, выход которого соединен с первым входом регистратора дальности, выход которого соединен с информационными входами первого, второго и третьего регистров, выход регистратора скорости соединен с информационными входами первого регистра скорости, второго регистра скорости и третьего регистра скорости, выход тактового генератора соединен с управляющими входами регистратора скорости, регистратора дальности и счетным первым входом счетчика импульсов, три выхода счетчика импульсов соединены с соответствующими тремя входами логического элемента «И-НЕ», при этом первый выход счетчика импульсов соединен с первым входом разрешения записи дальности первого регистра и первым входом разрешения записи скорости четвертого регистра, второй выход счетчика импульсов соединен со вторым входом логического элемента «И-НЕ» и с первыми входами разрешения записи дальности второго регистра дальности и второго регистра скорости, третий выход счетчика импульсов соединен с третьим входом логического элемента «И-НЕ» и с первыми входами разрешения записи дальности третьего регистра дальности и третьего регистра скорости, выход логического элемента «И-НЕ» соединен с входом логического элемента «НЕ», а также со вторыми входами разрешения чтения первого регистра дальности, второго регистра дальности, третьего регистра дальности, первого регистра скорости, второго регистра скорости, третьего регистра скорости, а информационные выходы первого, второго, третьего регистраторов дальности и первого, второго, третьего регистраторов скорости соединены, соответственно, с первым, вторым, третьим, четвертым, пятым и шестым входами вычислителя, выход логического элемента «НЕ» соединен со вторым входом счетчика импульсов, первый выход вычислителя соединен с входом устройства управления лучом антенны, выход которого соединен со вторым входом антенного переключателя и вторым входом тактового генератора, второй выход вычислителя соединен с входом предохранительно-исполнительного механизма боеприпаса.
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| ДВУХВОЛНОВЫЙ АДАПТИВНЫЙ РАДИОЛОКАТОР | 2009 |
|
RU2422847C1 |
| АДАПТИВНЫЙ РАДИОЛОКАТОР | 2009 |
|
RU2403584C2 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| US 7903024 B2, 08.03.2011 | |||
| US 20110309972 A1, 22.12.2011 | |||
| JP 2011226796 A, 10.11.2011 | |||
| WO 2003079046 A1, 25.09.2003 | |||

