Предлагаемое изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) с высокой частотой повторения импульсов (ВЧП).
Обычно сопровождение цели по дальности в РЛС с высокой частотой повторения осуществляется непрерывным или скачкообразным (дискретным) изменением периода повторения излучаемых импульсов при каждом очередном обращении к цели. В процессе такого сопровождения система изменяет период повторения Тr(t) так, чтобы была минимальной ошибка ε(t):
где τ(t) - изменяющаяся величина времени задержки сигнала, отраженного от цели;
Тr(t) - период повторения излучаемых импульсов;
n - целое число периодов повторения излучаемых импульсов;
ε(t) - сигнал ошибки по времени запаздывания.
При выполнении условия (1) отраженный от цели сигнал располагается посередине между излучаемыми импульсами.
При глубоких замираниях отраженного от цели сигнала и при некоторых других видах помех может произойти сбой в числе периодов повторения излучаемых импульсов (n), в результате чего дальность начинает измеряться системой с ошибкой в целое число периодов повторения и увеличенной случайной ошибкой. Возникнув один раз, ошибка может сохраняться и накапливаться.
Дальность D(t) до цели в такой системе может измеряться методом вычисления отношения скорости цели, полученной измерением доплеровского смещения частоты V(t) и относительной скорости изменения периода 
[Вопросы статистической теории радиолокации /Под ред. Г.Тартаковского, т.II, стр.398-400, М., Сов. Радио, 1964 г.].
Для расчета правильного значения дальности по формуле (2) при больших значениях n требуется измерять входящие в формулу значения величин V(t) и  с точностью до долей процента, что затруднительно или невозможно в сложной радиолокационной обстановке.
с точностью до долей процента, что затруднительно или невозможно в сложной радиолокационной обстановке.
Наиболее близким к предлагаемому способу сопровождения по дальности радиолокационной станцией с высокой частотой повторения импульсов является способ определения дальности до цели с использованием двух сменных периодов повторения импульсов T1 и Т2, оба из которых дополнительно к условию (1) удовлетворяют условию

где τmax - максимально возможное время задержки.
По значениям T1 и Т2 можно вычислить одназначное время задержки сигнала от цели [Вопросы статистической теории радиолокации /Под ред. Г.Тартаковского, т.I, стр.304, М., Сов. Радио, 1963 г.].
Недостатком данного способа является ухудшение селекции по времени задержки, в частности, при нахождении в луче РЛС второй цели.
Техническим результатом предлагаемого изобретения является повышение точности измерения дальности цели в процессе сопровождения.
Сущность изобретения состоит в том, что способ сопровождения цели по дальности радиолокационной станцией с высокой частотой повторения импульсов основан на слежении за временем запаздывания сигнала, отраженного от цели и дискретном изменении периода повторения импульсов при многократном обращении к цели.
Новыми операциями являются запоминание значения периодов излучаемых сигналов повторения Тi и сигналов ошибки εi при каждом i-м обращении к цели, вычисление за N последних обращений к цели коэффициента корреляции КN между значениями сигналов ошибки εi и разностями периодов (Тi-Тi-1), сравнение значения коэффициента корреляции КN с заранее установленным пороговым значением и при превышении абсолютным значением КN порога и в соответствии со знаком КN изменение на единицу в ту или другую сторону вычисленного экстраполированного значения целого числа периодов повторения излучаемых импульсов, содержащихся в значении времени запаздывания отраженного от цели сигнала, и повторение циклически всех операций при последующих обращениях к цели.
На фиг.1 приведена блок-схема устройства, реализующего предлагаемый способ.
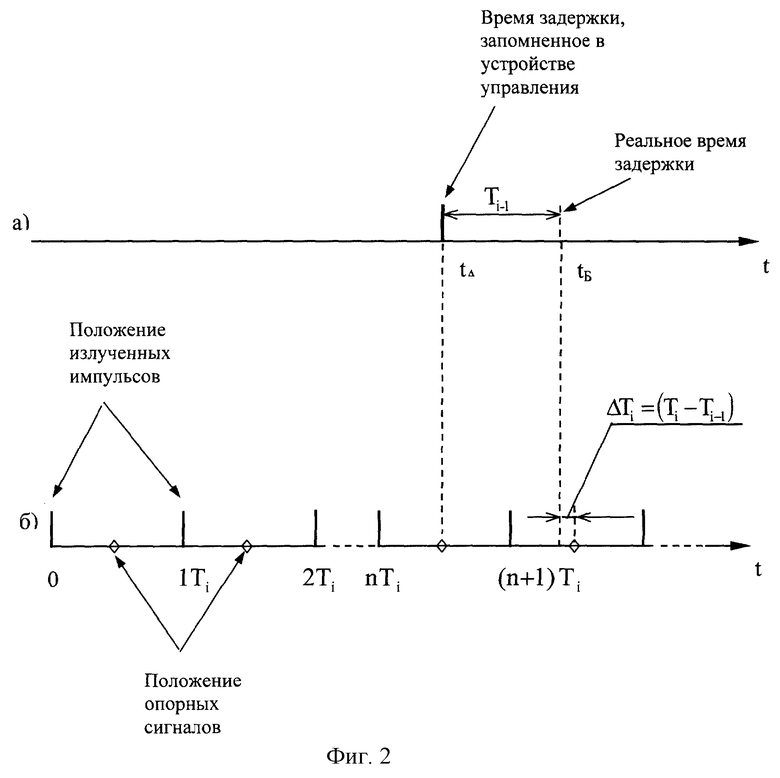
На фиг.2 приведены эпюры положения импульсов, поясняющие предлагаемый способ.
Устройство, реализующее предлагаемый способ состоит из блока сопровождения по дальности радиолокационной станции 1, содержащей временной дискриминатор 2, устройство управления 3, генератор опорных сигналов 4, и корректора числа периодов повторения излучаемых импульсов 5, состоящего из коррелятора со сбросом 6 и порогового устройства 7.
Первый вход временного дискриминатора 2 является входом блока сопровождения по дальности радиолокационной станции 1. Выход временного дискриминатора 2 соединен с первым входом устройства управления 3 и первым входом коррелятора со сбросом 6. Первый выход устройства управления 3 соединен со вторым входом коррелятора со сбросом 6. Второй выход устройства управления 3 подключен к входу генератора опорного сигнала 4. Выход коррелятора со сбросом 6 соединен со входом порогового устройства 7. Выход порогового устройства 7 подключен к второму входу устройства управления 3.
В настоящее время в основном находят применение блоки дискретного сопровождения по дальности, построенные на базе цифровой вычислительной техники. Для этого случая уравнение (1) примет вид

где величины, входящие в формулу имеют тот же смысл, что и в (1), но являются дискретными и относятся к определенному i-му интервалу времени, в течение которого эти величины считаются соизмеримыми.
При каждом i-м обращении к цели устройством управления 3 на основе экстраполированного по данным предыдущих измерений значения времени задержки сигнала от цели τi, фиг.2а, формируются излучаемые импульсы и опорные сигналы, расположенные во времени между излучаемыми импульсами, фиг.2б. Период повторения импульсов Тi соответствует соотношению (3), то есть в экстраполированном значении времени задержки τi содержится полуцелое число периодов повторения импульсов. Если при этом положения опорных сигналов и отраженных от цели импульсов во временном дискриминаторе 2, фиг.1, совпадают, что и происходит в штатной ситуации, то сигнал ошибки εi на выходе дискриминатора равен нулю. В реальной системе сигнал ошибки всегда несколько отличен от нуля и имеет случайный характер из-за влияния собственных шумов приемника и всевозможных внешних возмущений. В замкнутой системе дальномера эти стохастические воздействия обусловливают наличие случайной ошибки сопровождения.
Сигналы ошибки с временного дискриминатора 2, фиг.1, поступают на коррелятор со сбросом 6, фиг.1, куда выдаются с устройства управления 3 значения периодов повторения Тi. В корреляторе со сбросом 6, фиг.1, за N обращений к цели вычисляется коэффициент корреляции по формуле, справедливой для N пар наблюденных случайных величин хi и уi (Дж.Бендат, А.П.Пирсол. Измерение и анализ случайных процессов, М., Мир, 1974 г., стр.152):
В рассматриваемом случае величины, используемые в формуле (4), имеют вид:

Вычисленный по формуле (4) коэффициент корреляции КN может изменяться в пределах 
Если время задержки измерено правильно, то сигнал ошибки изменяется случайным образом от измерения к измерению и статистически не связан с величиной  Коэффициент корреляции, изменяясь случайным образом, близок по абсолютному значению к нулю и не превосходит заранее установленного в пороговом устройстве 7, фиг.1, значения порога. Наличие коррелятора в этом случае никак не сказывается на работе устройства сопровождения по дальности.
Коэффициент корреляции, изменяясь случайным образом, близок по абсолютному значению к нулю и не превосходит заранее установленного в пороговом устройстве 7, фиг.1, значения порога. Наличие коррелятора в этом случае никак не сказывается на работе устройства сопровождения по дальности.
Если же время задержки измерено неправильно или произошел сбой в числе периодов излученных импульсов n, например, под воздействием уводящей по дальности помехи фиг.1, то запомненное в устройстве управления 3 значение времени запаздывания tA, фиг.2а, по которому вычисляется период повторения Тi и реальное время запаздывания сигнала tБ, фиг.2а, будут отличаться на период повторения. В этом случае при следующем i-м обращении к цели сигналы, отраженные от цели, и опорные сигналы не совпадают во времени, а отстоят на разность периодов повторения Это вызовет появление в сигнале ошибки εi составляющей, пропорциональной  , а на выходе коррелятора со сбросом 6, фиг.1, коэффициент корреляции превзойдет по абсолютной величине пороговое значение, заранее установленное в пороговом устройстве 7, фиг.1. В пороговом устройстве 7 будет сформирован сигнал на изменение числа периодов повторений излучаемых импульсов n, а в устройстве управления произойдет изменение на одну единицу в ту или другую сторону в зависимости от знака коэффициента корреляции. После этого производится обнуление данных на выходе коррелятора со сбросом, и весь процесс повторяется циклически. Таким образом осуществляется корректировка числа периодов повторения излучаемых импульсов (n) в правильном направлении и как следствие этого уменьшается ошибка сопровождения цели и повышается точность измерения дальности до цели в процессе сопровождения.
, а на выходе коррелятора со сбросом 6, фиг.1, коэффициент корреляции превзойдет по абсолютной величине пороговое значение, заранее установленное в пороговом устройстве 7, фиг.1. В пороговом устройстве 7 будет сформирован сигнал на изменение числа периодов повторений излучаемых импульсов n, а в устройстве управления произойдет изменение на одну единицу в ту или другую сторону в зависимости от знака коэффициента корреляции. После этого производится обнуление данных на выходе коррелятора со сбросом, и весь процесс повторяется циклически. Таким образом осуществляется корректировка числа периодов повторения излучаемых импульсов (n) в правильном направлении и как следствие этого уменьшается ошибка сопровождения цели и повышается точность измерения дальности до цели в процессе сопровождения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530808C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2538105C2 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| Способ определения дальности и радиальной скорости цели импульсно-доплеровской радиолокационной станцией | 2023 |
|
RU2807331C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях с высокой частотой повторения импульсов. Техническим результатом изобретения является повышение точности измерения дальности в процессе сопровождения. Сущность изобретения состоит в том, что способ сопровождения цели по дальности радиолокационной станцией с высокой частотой повторения импульсов основан на слежении за временем запаздывания сигнала, отраженного от цели и дискретном изменении периода повторения импульсов при многократном обращении к цели. Отличием заявленного способа является запоминание значения периодов излучаемых сигналов повторения Тi и сигналов ошибки εi при каждом i-м обращении к цели, вычисление за N последних обращений к цели коэффициента корреляции KN между значениями сигналов ошибки εi и разностями периодов (Тi-Тi-1), сравнение значения коэффициента корреляции KN с заранее установленным пороговым значением и при превышении абсолютным значением KN порога и в соответствии со знаком KN изменение на единицу в ту или другую сторону вычисленного экстраполированного значения целого числа периодов повторения излучаемых импульсов, содержащихся в значении времени запаздывания отраженного от цели сигнала, и повторение циклически всех операций при последующих обращениях к цели. 2 ил.
Способ сопровождения цели по дальности радиолокационной станцией с высокой частотой повторения излучаемых сигналов, основанный на слежении за временем запаздывания сигналов, отраженных от цели, дискретном изменении периода повторения излучаемых сигналов при многократном обращении к цели, отличающийся тем, что запоминают значения периодов повторения Ti излучаемых сигналов и значения сигналов ошибки εi по времени запаздывания τi отраженных сигналов при каждом i-м обращении к цели, при этом εi=(n+1/2)Ti-τi, где n - целое число периодов повторения излучаемых сигналов, τi - изменяющаяся величина времени запаздывания сигнала, отраженного от цели, i=1-N, вычисляют за N последних обращений к цели коэффициент корреляции KN между значениями сигналов ошибки εi и разностями периодов (Ti-Ti-1), изменяющийся в пределах -1<KN<+1, сравнивают значение коэффициента корреляции KN с заранее установленным пороговым значением, при превышении абсолютным значением KN порога и в соответствии со знаком KN изменяют на единицу в τi или другую сторону экстраполированное значение целого числа периодов повторения, содержащихся в значении τi величины времени запаздывания отраженного от цели сигнала, после чего все операции повторяют циклически при последующих обращениях к цели.
| Вопросы статистической теории радиолокации | |||
| Под ред | |||
| ТАРТАКОВСКОГО Г | |||
| - М.: Сов | |||
| радио, 1964, т.2, с.398-400 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2001 |
|
RU2194289C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| US 5289189 A, 22.02.1994 | |||
| US 4338604 A, 06.07.1982. | |||

