Изобретение относится к радиолокации и может быть использовано в когерентно-импульсных, импульсно-доплеровских радиолокационных станциях (РЛС), осуществляющих обнаружение движущихся целей на фоне пассивных помех различного происхождения (отражений от подстилающей поверхности, метеообразований, облаков диполей и т.д.), с использованием систем селекции движущихся целей (СДЦ).
Задача СДЦ при наличии на входе приемника РЛС пассивных помех осложнена тем, что мощность помех обычно значительно превышает мощность полезного сигнала. Это объясняется характеристиками пассивных помех, представляющих собой отражения от пространственно-распределенных гидрометеобразований, земной поверхности, местных предметов, а также отражения от умышленных (организованных) помех, примером которых являются диполи. При этом отношение мощности помехи к мощности полезного сигнала может составлять 40-80 дБ [1, с. 5].
Для решения задачи СДЦ используются различные способы, например способ однократной СДЦ [2, с. 41], включающий излучение в направлении зоны обзора РЛС зондирующего сигнала, состоящего из двух импульсов, вычитание в каждой дискрете по дальности принятых отраженных импульсов и получение, таким образом, выходного сигнала разностного сигнала. В результате пассивные помехи в виде сигналов, отраженных от неподвижных объектов, подавляются, а сигналы, отраженные от движущейся цели, проходят для дальнейшей обработки.
Недостатком способа является низкая эффективность СДЦ по причине узкой полосы режекции пассивной помехи и неравномерного коэффициента передачи сигналов в диапазоне доплеровских частот пассивных помех и целей, вследствие чего возникают потери в отношении сигнал/помеха [3, с. 125].
Известен способ двукратной СДЦ [4, с. 319], включающий излучение в направлении зоны обзора РЛС зондирующего сигнала, состоящего из трех импульсов, причем третий импульс излучается после второго импульса через интервал времени, не равный интервалу времени между излучениями второго и первого импульсов, получение двух разностей принятых импульсов в каждой дискрете по дальности, а выходной сигнал определяют путем вычитания полученных разностей.
Недостатком способа является низкая эффективность СДЦ по причине неравномерного коэффициента передачи сигналов в диапазоне доплеровских частот пассивных помех и целей, вследствие чего возникают потери в отношении сигнал/помеха [3, с. 126].
Близкую к прямоугольной форме зону режекции обеспечивают способы СДЦ на основе фильтров с бесконечной импульсной характеристикой (БИХ) в виде эллиптических и подобных им фильтров [2, с. 85]. Так, эллиптические фильтры с числом обратных связей четыре и более обеспечивают практически прямоугольную зону режекции с достаточной ее глубиной и шириной. Их недостатком является большая длительность переходных процессов, которая не позволяет войти в установившийся режим работы в ситуациях, когда число импульсов, излучаемых и принимаемых РЛС, ограничено. На практике подобные ограничения обусловлены жесткими требованиями к скорости обзора зоны обнаружения, когда нет возможности просматривать одно направление достаточно длительное время. Другим недостатком БИХ фильтров является сложность изменения ширины зоны режекции, что затрудняет адаптацию к изменяющейся помеховой обстановке [5, с. 780-791].
Следующий способ СДЦ основан на использовании фильтров с амплитудно-частотной характеристикой (АЧХ) заданной формы, синтезированных методом ограниченной оптимизации [2, с. 95]. В зоне режекции, АЧХ каждого из фильтров имеют провалы заданной ширины и глубины. При формировании АЧХ последовательно осуществляется поиск фазовых коэффициентов, необходимых для образования частотной характеристики фильтра требуемой формы, используя заранее заданный критерий. Весовые коэффициенты, необходимые для формирования требуемых АЧХ, вычисляются методами последовательного приближения (координатный поиск, генетические алгоритмы и т.д.). Недостатком рассматриваемого способа является снижение эффективности СДЦ при увеличении мощности и ширины спектра пассивных помех [5, с. 780-791].
Известен способ СДЦ на фоне пассивных помех [1, с. 10]. Сущность способа заключается в том, что принимают пачку импульсов, соответствующих одному элементу разрешения по дальности, формируют комплексную огибающую принятой пачки импульсов, проводят декорреляцию (обеление) принятой пачки путем пропускания ее через обеляющий фильтр, подвергают амплитудному детектированию, осуществляют некогерентное накопление принятой пачки импульсов, сравнивают полученную после детектирования величину с порогом и принимают решение об обнаружении движущейся цели в случае превышения порога.
Недостатком способа является то, что его реализации требуется точное знание корреляционной матрицы пассивной помехи, которая неизвестна в силу априорной неопределенности относительно характеристик ее энергетического спектра [1, с. 10]. Кроме того, имеют место потери в отношении сигнал/шум на некогерентное накопление сигнала движущейся цели (по сравнению с когерентным), которые могут оказаться неприемлемым во многих практических приложениях.
Известен способ СДЦ на фоне пассивных помех [1, с. 9], отличающийся от предыдущего тем, что формируют число приемных каналов, равное числу импульсов принятой пачки, в каждом приемном канале осуществляют когерентное накопление принятой пачки импульсов в согласованном фильтре, настроенном на определенную частоту Доплера, подвергают амплитудному детектированию, сравнивают полученную после детектирования величину с порогом и принимают решение об обнаружении движущейся цели в случае превышения порога.
Недостатком способа также является требование точного знания корреляционной матрицы пассивной помехи. Кроме того, при достаточно большом количестве импульсов в принятой пачке способ требует больших аппаратных затрат [1, с. 9].
В связи с этим заслуживает внимания способ СДЦ [6], основанный на замене априори неизвестной корреляционной матрицы пассивных помех ее аппроксимацией на конечномерное подпространство известного числа дискретных комплексных синусоид с известными частотами.
Указанный способ СДЦ выбран в качестве наиболее близкого технического решения (прототипа). Способ заключается в том, что принимают антенной РЛС ограниченную последовательность (пачку) из N импульсов, выделяют квадратурные составляющие комплексной огибающей принятой пачки сигналов, в каждой квадратурной составляющей осуществляют преобразование сигналов в цифровую форму, из полученных комплексных цифровых отсчетов принятой пачки из N импульсов в стробе дальности составляют вектор входных данных Y размером N×1, осуществляют аппроксимацию сигнала пассивной помехи его проекцией на конечномерное подпространство согласно выражению
P=S(SHS)-1SH,
где Р - матрица-проектор на подпространство помехи размером N×N; N - количество импульсов в принимаемой ограниченной последовательности (пачке) импульсов; S - матрица размером N×М, М<N, составленная из вектор-столбцов S(ƒ1), …, S(ƒM), частоты Доплера которых ƒ1, …, ƒM с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления; М - число используемых для аппроксимации пассивной помехи синусоид; Н - знак эрмитово-сопряженной матрицы (вектора), рассчитывают весовой вектор по формуле
w=(I-P)S(ƒ0),
где I - единичная матрица размером N×N, S(ƒ0) - вектор полезного сигнала размером N×1; ƒ0 - частота Доплера полезного сигнала, вычисляют величину ξ согласно выражению
ξ=YHw,
производят последующее когерентное накопление полезного сигнала с помощью многоканальной системы когерентных межпериодных фильтров, каждый из которых согласован с некоторой частотой Доплера сигнала, выделяют полезный сигнал при превышении заданного порога.
Недостатками способа-прототипа являются снижение эффективности селекции движущихся целей при увеличении мощности и ширины спектра пассивных помех, а также высокие вычислительные затраты.
Изобретение решает задачу: повысить эффективность селекции движущихся целей при увеличении мощности и ширины спектра пассивных помех.
Решение задачи заключается в том, что принимают антенной радиолокационной станции ограниченную последовательность (пачку) из N импульсов, выделяют квадратурные составляющие комплексной огибающей принятой пачки сигналов, в каждой квадратурной составляющей осуществляют преобразование сигналов в цифровую форму, из полученных комплексных цифровых отсчетов принятой пачки из N импульсов в стробе дальности составляют вектор входных данных Y размером N×1 отличающийся тем, что над вектором Y осуществляют межпериодную фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ), рассчитывают весовой вектор b размером М×1 согласно выражению

где  - матрица размером М×М, элементы которой Fn(ƒm) определяются значением комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm,
- матрица размером М×М, элементы которой Fn(ƒm) определяются значением комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm,  М - число используемых для аппроксимации пассивной помехи синусоид, которые с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления; F0 - вектор размером М×1, элементы которого F0(ƒm) определяются значением комплексной частотной характеристики доплеровского фильтра, в котором осуществляется подавление (компенсация) пассивных помех на частотах ƒm,
М - число используемых для аппроксимации пассивной помехи синусоид, которые с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления; F0 - вектор размером М×1, элементы которого F0(ƒm) определяются значением комплексной частотной характеристики доплеровского фильтра, в котором осуществляется подавление (компенсация) пассивных помех на частотах ƒm,  вычисляют величину Δ согласно выражению
вычисляют величину Δ согласно выражению
где u0,s - комплексный сигнал (напряжение) в s-ом стробе дальности на выходе доплеровского фильтра, в котором осуществляется подавление (компенсация) пассивных помех, u - вектор размером М×1, элементами um,s которого являются комплексные сигналы (напряжения) на выходе доплеровских фильтров с номерами  в s-ом стробе дальности, Т - знак транспонирования вектора, сравнивают модуль величины Δ с заданным порогом η, при превышении порога принимают решение о наличии движущейся цели.
в s-ом стробе дальности, Т - знак транспонирования вектора, сравнивают модуль величины Δ с заданным порогом η, при превышении порога принимают решение о наличии движущейся цели.
Изобретение поясняется чертежами. На фиг. 1 изображена структурная схема устройства, реализующего предлагаемый способ селекции движущихся целей, где 1 - фазовые детекторы; 2 - аналого-цифровые преобразователи (АЦП); 3 - антенна, 4 - приемник, 5 - когерентный гетеродин; 6 - процессор обработки сигналов; 7 - фазовращатель на 90°.
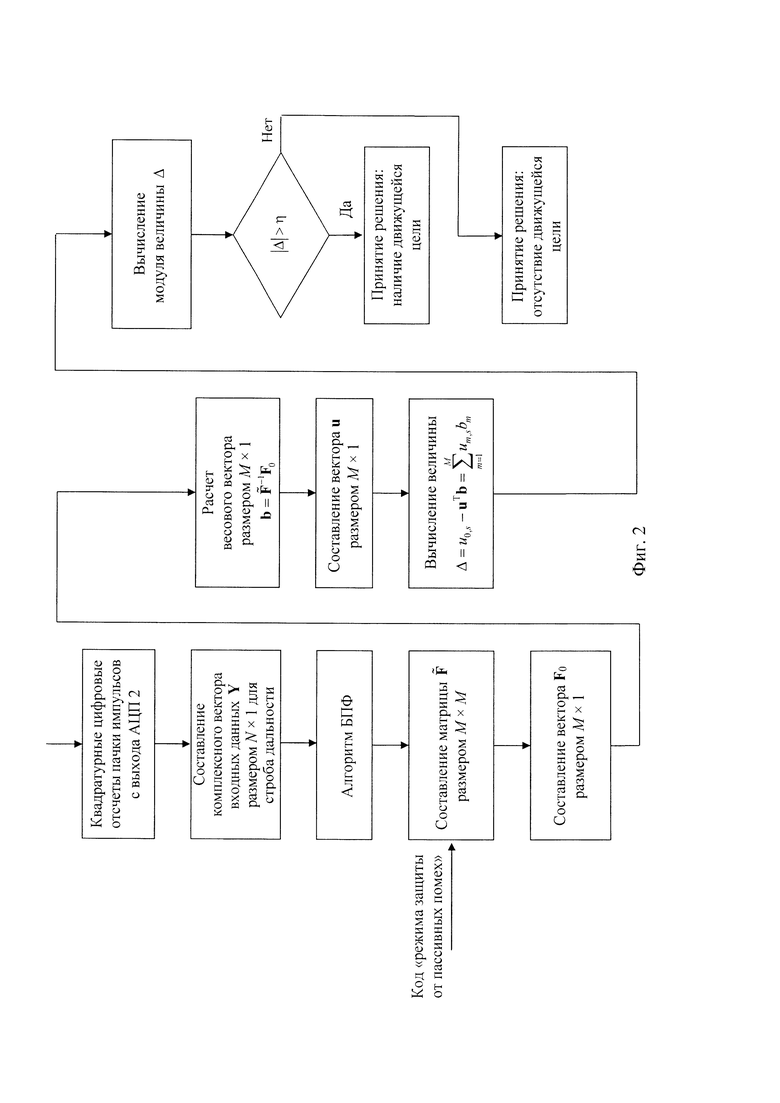
На фиг. 2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 6.
На фиг. 3-6 приведены диаграммы, демонстрирующие сравнительную эффективность селекции движущейся цели для способа-прототипа и предлагаемого способа для пассивных помех с различной шириной спектра и мощностью.
На фиг. 3 представлены амплитудно-частотные спектры (АЧС) сигналов (пассивной помехи, шума и движущейся цели), поступающих на входы систем СДЦ, реализующих способ-прототип и предлагаемый способ. На фиг. 3а показан АЧС сигналов при отношении помеха/шум 25 дБ. На фиг. 3б показан АЧС сигналов при отношении помеха/шум 60 дБ.
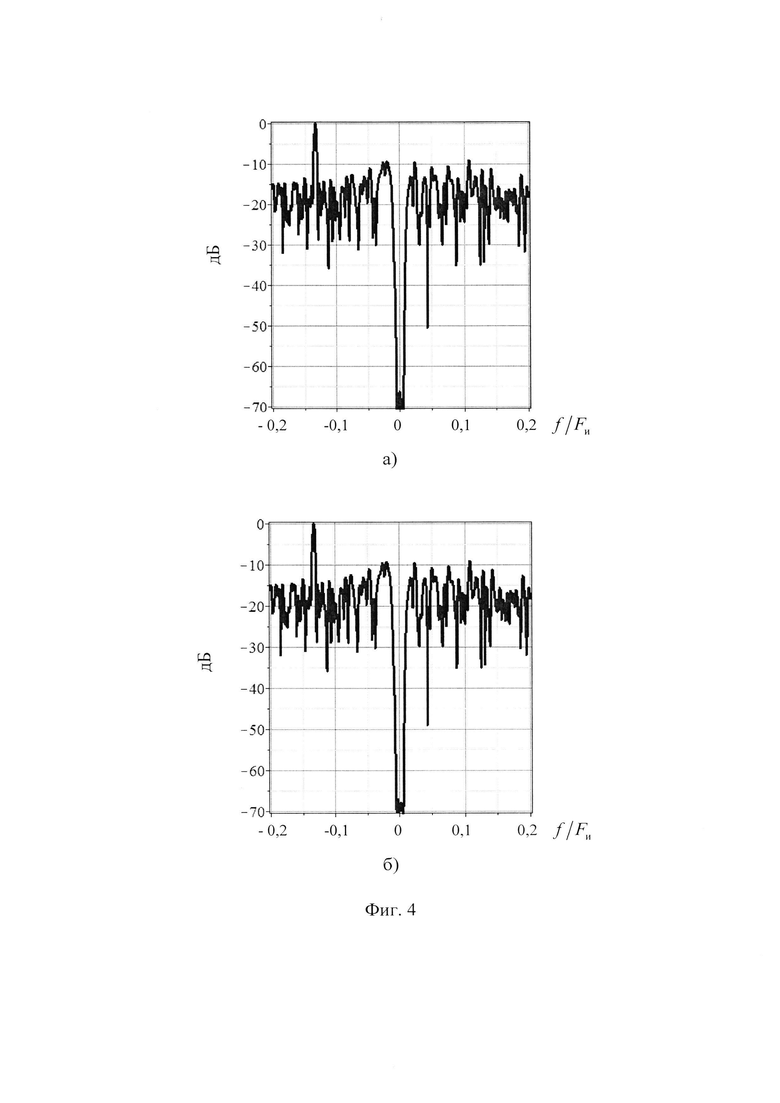
На фиг. 4 приведены АЧС выходных сигналов систем СДЦ для способа прототипа (фиг. 4а) и предлагаемого способа (фиг. 4б) при отношении помеха/шум 25 дБ и нормированной к частоте повторения импульсов Fи=1/Ги, где Ти - период повторения импульсов, ширине ΔF зоны режекции пассивной помехи ΔF/Fи=0,01.
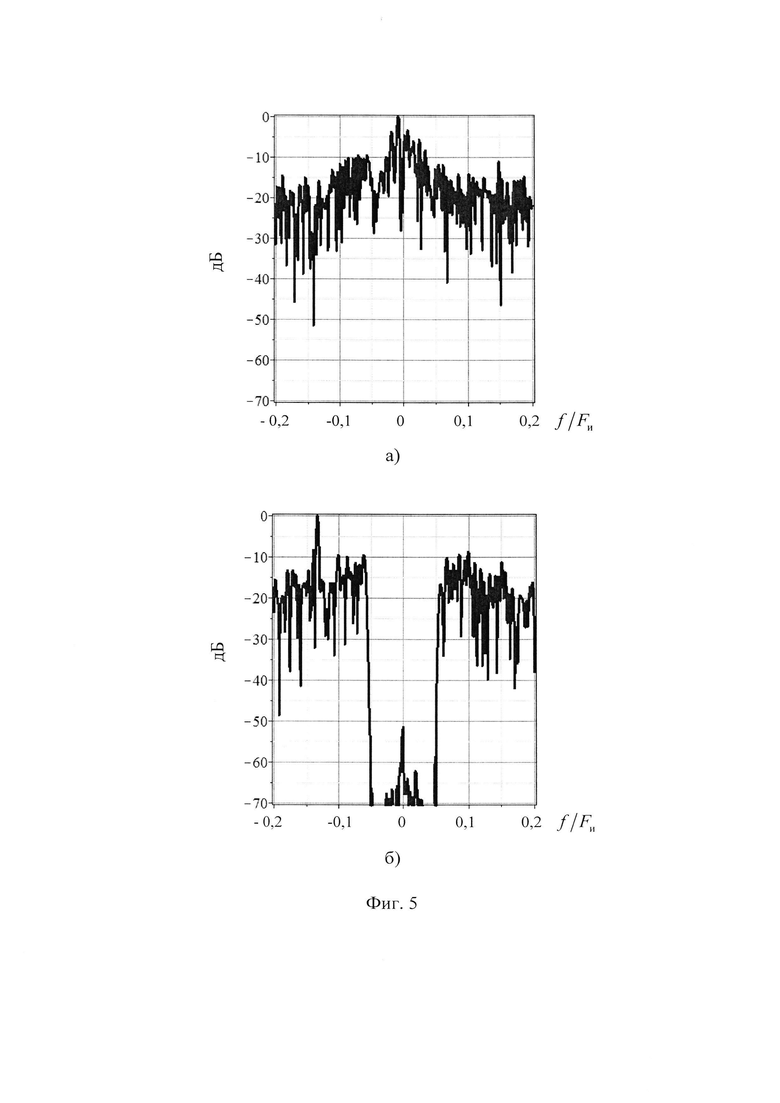
На фиг. 5 приведены АЧС выходных сигналов систем СДЦ для способа прототипа (фиг. 5а) и предлагаемого способа (фиг. 5б) при отношении помеха/шум 60 дБ и нормированной ширине зоны режекции ΔF/Fи=0,1.
На фиг. 6 представлены результаты двумерной азимутально-дальностной обработки сигналов системы СДЦ для способа-прототипа и предлагаемого способа при отношении помеха/шум 60 дБ и нормированной ширине зоны режекции ΔF/Fи - 0,1. На фиг. 6а представлен сигнал на входе системы СДЦ. На фиг. 6б представлен сигнал на выходе системы СДЦ при обработке способом-прототипом, а на фиг. 6в - предлагаемым способом.
В основу способа положен принцип компенсации сигналов пассивных помех на выходе системы частотных фильтров, сформированных после когерентного накопления принятого сигнала с помощью алгоритма БПФ. Компенсации сигналов пассивных помех проводится за счет их умножения на заранее рассчитанный весовой вектор, элементы которого определяется значениями частотных характеристик фильтров на частотах пассивных помех и не зависят от параметров самих помех.
Аналогично способу-прототипу сигнал пассивной помехи будем представлять в виде М комплексных синусоид с частотами ƒm,  . Известно, что отклик на сумму входных воздействий для линейных систем, к которым относится и алгоритм БПФ, представляет собой суперпозицию откликов на каждое воздействие. То есть отклик алгоритма БПФ на смесь сигналов пассивных помех есть не что иное, как сумма откликов на сигнал каждой помехи.
. Известно, что отклик на сумму входных воздействий для линейных систем, к которым относится и алгоритм БПФ, представляет собой суперпозицию откликов на каждое воздействие. То есть отклик алгоритма БПФ на смесь сигналов пассивных помех есть не что иное, как сумма откликов на сигнал каждой помехи.
Тогда, комплексное напряжение на выходе n-го доплеровского фильтра, сформированного после когерентного накопления принятого сигнала с помощью алгоритма БПФ в s-ом стробе дальности, при воздействии М сигналов пассивных помех и отсутствии шума приемного канала РЛС можно записать в виде

где un,s - комплексное напряжение на выходе n-го доплеровского фильтра, в s-ом стробе дальности,  N - количество импульсов в принимаемой пачке; S - количество стробов дальности; am,s - комплексная амплитуда m-го сигнала пассивной помехи, образованная в результате обработки вектора входных данных Y по алгоритму N-точечного БПФ s-ом стробе дальности; Fn(ƒm) - значение комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm, причем M<N.
N - количество импульсов в принимаемой пачке; S - количество стробов дальности; am,s - комплексная амплитуда m-го сигнала пассивной помехи, образованная в результате обработки вектора входных данных Y по алгоритму N-точечного БПФ s-ом стробе дальности; Fn(ƒm) - значение комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm, причем M<N.
Из выборки напряжений un,s (1) составим матрицу Т размера S×N вида

Сформируем матрицу ТН размера N×S, которая будет эрмитово-сопряженной по отношению к матрице Т, и найдем произведение ТНТ
где
Составим систему линейных уравнений, связывающих между собой неизвестный весовой вектор b и комплексные напряжения Ui,j, определяемые матрицей ТНТ (3)

где b - весовой вектор размером (N-1)×1; 0 - вектор из N-1 нулевых элементов; Σmin - минимальная квадратичная ошибка.
Для отыскания неизвестного вектора b используем N-1 уравнение системы (5) за исключением первого. В этом случае система уравнений (5) принимает вид

Вектора uj и  из (4) с учетом формулы (1) можно записать в виде
из (4) с учетом формулы (1) можно записать в виде
где 
Тогда, каждый элемент матрицы ТНТ будет иметь вид

где 
С учетом выражения (8) матрицу ТНТ можно записать в виде

В каждой из строк матрицы (9) одинаковы элементы, представляющие собой вектор-строки  , а в каждом столбце - вектор-столбцы Fj. Это позволяет представить ее в виде произведения трех прямоугольных матриц размера N×M, М×М и M×N соответственно [7, с. 54-64]
, а в каждом столбце - вектор-столбцы Fj. Это позволяет представить ее в виде произведения трех прямоугольных матриц размера N×M, М×М и M×N соответственно [7, с. 54-64]

Учитывая выражение (10), систему уравнений (6) можно записать в виде

где

Матрица  получается из матрицы FH выражения (10) путем вычеркивания первой строки и имеет размер (N-1)×M, матрица
получается из матрицы FH выражения (10) путем вычеркивания первой строки и имеет размер (N-1)×M, матрица получается из матрицы F этого же выражения путем вычеркивания первого столбца и имеет размер M×(N-1).
получается из матрицы F этого же выражения путем вычеркивания первого столбца и имеет размер M×(N-1).
При воздействии М сигналов пассивных помех для их подавления достаточно использовать напряжения с выходов М доплеровских фильтров. Тогда матрицы  и
и  в выражении (11) становятся квадратными, с размерами М×М. Это позволяет последовательно умножить слева обе части системы уравнений (11) на матрицы, обратные
в выражении (11) становятся квадратными, с размерами М×М. Это позволяет последовательно умножить слева обе части системы уравнений (11) на матрицы, обратные  и А и получить в результате систему уравнений вида
и А и получить в результате систему уравнений вида

Решение ее относительно неизвестного весового вектора имеет вид

В соответствии с предлагаемым способом для компенсации пассивных помех необходимо в s-ом стробе дальности из комплексного напряжения защищаемого доплеровского фильтра u0,s вычесть комплексные напряжения компенсационных доплеровских фильтров u, умноженных на соответствующие элементы весового вектора b, т.е. вычислить величину Δ согласно выражению

где u - вектор размером М×1, элементами которого um,s являются комплексные сигналы (напряжения) на выходе доплеровских фильтров с номерами  , в s-ом стробе дальности, Т - знак транспонирования вектора.
, в s-ом стробе дальности, Т - знак транспонирования вектора.
После подстановки в выражение (14) значений напряжений (1) с учетом формулы (13) величина Δ примет вид

Выражение (15) показывает, что в рассматриваемом случае происходит полная компенсация сигналов пассивных помех на выходе защищаемого доплеровского фильтра в выбранном стробе дальности.
В реальных РЛС присутствуют шумы наблюдения. Это означает, что комплексное напряжение un,s при воздействии М сигналов пассивных помех в (1) будет искажено шумами. Поэтому элементы весового вектора b, также будут вычисляться с погрешностью. Как следствие, для принятия решения о наличии движущейся цели необходимо сравнивать модуль величины Δ с заданным порогом η. Последний выбирается исходя из требуемых значений вероятностей ложных решений.
Таким образом, неизвестный весовой вектор b, может быть достаточно просто найден через М известных значений частотных характеристик доплеровских фильтров на М частотах пассивных помех, т.к. при цифровой обработке сигналов форма характеристик частотных фильтров известна с высокой точностью. Следует подчеркнуть, что весовой вектор b не зависит от мощностей синусоид, образующих пассивную помеху, вследствие чего отпадает необходимость в каких-либо априорных предположениях о форме ее спектра. Ширина зоны режекции регулируется количеством, а расстановка нулей АЧХ значениями элементов весового вектора b, координаты которых определяются частотами ƒm,  . При этом каждому дискретному значению ширины зоны режекции соответствует свой набор коэффициентов весового вектора b.
. При этом каждому дискретному значению ширины зоны режекции соответствует свой набор коэффициентов весового вектора b.
Проведем сравнительную оценку эффективности способа-прототипа и предлагаемого в изобретении способа. Известно [8, с. 445; 9, с. 49], что проекционные методы, к которым относится способ-прототип, из-за отличия весового вектора от оптимального обладают потерями в отношении сигнал/(помеха + шум). В частности, эффективность подавления помех определяется тем, насколько точно удается разделить «шумовые» и «помеховые» собственные значения корреляционной матрицы мешающих сигналов.
Одним из показателей эффективности способов селекции движущихся целей является коэффициент улучшения, который равен величине, обратной минимальному собственному значению нормированной корреляционной матрицы мешающих сигналов [2, с. 69; 3, с. 160]. Связано это с тем, что минимизация мощности пассивных помех и шумов при постоянстве нормы весового вектора, например на гиперсфере единичного радиуса, эквиваленто минимизации отношения Рэлея
которое обеспечивается правым собственным вектором корреляционной матрицы мешающих сигналов R, соответствующим ее минимальному собственному значению [9, с. 18].
Для способа-прототипа корреляционную матрицу R стационарных мешающих сигналов (суммы пассивных помех и собственного шума приемного канала) размером N×N можно записать в виде
где Pm - мощность m-ой комплексной синусоиды пассивной помехи; Ти - период повторения импульсов;  - мощность собственного шума приемного канала; δ(k) - дельта-функция; ƒm,
- мощность собственного шума приемного канала; δ(k) - дельта-функция; ƒm,  - частоты, которые с некоторым шагом перекрывают диапазон частот пассивной помехи; М - число используемых для аппроксимации пассивной помехи комплексных синусоид; N - количество импульсов в принимаемой пачке.
- частоты, которые с некоторым шагом перекрывают диапазон частот пассивной помехи; М - число используемых для аппроксимации пассивной помехи комплексных синусоид; N - количество импульсов в принимаемой пачке.
Матрица R является эрмитовой и положительно определенной. Поэтому она может быть представлена своим спектральным разложением

где Vn,  - ортонормированные собственные векторы; Λ=diag(λ1, …, λN) - диагональная матрица собственных значений λn матрицы R, которые обычно упорядочиваются по убыванию, т.е. λ1>λ2>…>λN.
- ортонормированные собственные векторы; Λ=diag(λ1, …, λN) - диагональная матрица собственных значений λn матрицы R, которые обычно упорядочиваются по убыванию, т.е. λ1>λ2>…>λN.
Для сравнения эффективности способов целесообразно нормировать элементы матрицы R к ее же элементу при нулевом временном сдвиге, т.е.  При этом диагональные элементы нормированной
При этом диагональные элементы нормированной  корреляционной матрицы будут равны единице
корреляционной матрицы будут равны единице

Поскольку матрица  также является эрмитовой и положительно определенной, то она может быть представлена своим спектральным разложением
также является эрмитовой и положительно определенной, то она может быть представлена своим спектральным разложением

где  - диагональная матрица собственных значений
- диагональная матрица собственных значений  матрицы
матрицы  , причем
, причем 
С учетом известных соотношений между собственными значениями и диагональными элементами квадратных матриц [10, с. 100] можно записать

Из последнего выражения следует, что

Если выполняется условие 
 , что обычно имеет место на практике, то М наибольших собственных значений матрицы R существенно превышают N-M остальных, которые близки к мощности шума
, что обычно имеет место на практике, то М наибольших собственных значений матрицы R существенно превышают N-M остальных, которые близки к мощности шума  [8, с. 444]. Поэтому можно считать, что
[8, с. 444]. Поэтому можно считать, что  а минимальное собственное значение матрицы
а минимальное собственное значение матрицы  равно
равно

Тогда коэффициент улучшения Kу1 для способа-прототипа равен

Для предлагаемого в изобретении способа корреляционную матрицу С стационарных мешающих сигналов размером S×S можно записать в виде

где элементы c[k] матрицы С, описываются как

на том основании, что мощность комплексной синусоиды Pm (узкополосной коррелированной помехи) возрастает при когерентном накоплении в N2 раз, а мощность шума в N раз [11, с. 214]. Когерентное накопление осуществляется в предлагаемом методе с помощью алгоритма N-точечного БПФ для S стробов дальности над вектором входных данных Y размером N×1.
Матрица С является эрмитовой и положительно определенной. Поэтому она может быть представлена своим спектральным разложением

где Gs,  - ортонормированные собственные векторы; L=diag(l1, …, lS) - диагональная матрица собственных значений, l1>l2>…>lS.
- ортонормированные собственные векторы; L=diag(l1, …, lS) - диагональная матрица собственных значений, l1>l2>…>lS.
Нормированная к элементу  при нулевом временном сдвиге (k=0) матрица
при нулевом временном сдвиге (k=0) матрица  будет иметь вид
будет иметь вид
а ее спектральное разложение

где  - диагональная матрица собственных значений,
- диагональная матрица собственных значений, 
С учетом известных соотношений между собственными значениями и диагональными элементами матриц можно записать

из чего следует, что

В последнем выражении учтено, что выполняется условие  поэтому можно считать, что
поэтому можно считать, что  При этом коэффициент улучшения Kу2 для предлагаемого способа равен
При этом коэффициент улучшения Kу2 для предлагаемого способа равен

Сравнение между собой выражений (16) и (17) позволяет заключить, что коэффициент улучшения для предлагаемого способа примерно в N раз больше, чем для способа-прототипа.
Выигрыш в эффективности подавления пассивных помех можно объяснить тем, что прототипе разделение на подпространства пассивных помех и собственных шумов осуществляется до когерентного накопления вектора входных данных, а в предлагаемом способе - после. Как следствие, в предлагаемом способе узкополосная (коррелированная) помеха накапливается когерентно, т.е. ее мощность повышается в N2 раз, где N - число импульсов в принимаемой пачке, а собственные шумы приемника накапливаются некогерентно, т.е. их мощность увеличивается в N раз. Таким образом, отношение помеха-шум в предлагаемом способе, по сравнению с прототипом, возрастает в N раз. Кроме того, увеличение М в способе прототипе эквивалентно расширению спектра пассивной помехи. С увеличением М собственные значения λm корреляционной матрицы мешающих сигналов R, соответствующие сигналам пассивных помех, быстро убывают, что приводит к нарушению условия  являющегося фактически критерием разделения сигналов на подпространства пассивных помех и собственных шумов. Другими словами, эффективность разделения зависит от отношения
являющегося фактически критерием разделения сигналов на подпространства пассивных помех и собственных шумов. Другими словами, эффективность разделения зависит от отношения  а с увеличением М это отношение снижается. Как следствие, с расширением спектра пассивной помехи наблюдается снижение эффективности способа-прототипа.
а с увеличением М это отношение снижается. Как следствие, с расширением спектра пассивной помехи наблюдается снижение эффективности способа-прототипа.
В предлагаемом способе за счет когерентного накопления узкополосной коррелированной помехи отношение  в N раз больше, т.к. для корреляционной матрицы мешающих сигналов С
в N раз больше, т.к. для корреляционной матрицы мешающих сигналов С  что и приводит к более высокой эффективности разделения на подпространства пассивных помех и собственных шумов с увеличением М по сравнению со способом-прототипом.
что и приводит к более высокой эффективности разделения на подпространства пассивных помех и собственных шумов с увеличением М по сравнению со способом-прототипом.
Один из вариантов структурной схемы устройства, реализующего предлагаемый способ СДЦ, представлен на фиг. 1. Принятый антенной 3 сигнал поступает на вход приемника 4. Для обеспечения когерентной обработки сигнал с выхода приемника с помощью двух фазовых детекторов 1, когерентного гетеродина 5, фазовращателя на 90° 7 разделяется на квадратурные составляющие. В аналого-цифровых преобразователях 2 производится формирование последовательности цифровых отсчетов сигнала. Вся дальнейшая обработка сигнала происходит в процессоре обработки сигналов 6.
На фиг. 2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 6. Из полученной в результате АЦП отсчетов принятой пачки сигналов из N импульсов строба дальности составляют комплексный вектор входных данных Y, соответствующий принимаемому азимутальному пакету, размером N×1 и осуществляют меж-периодную фильтровую обработку по алгоритму N-точечного БПФ.
В зависимости от обнаружения определенных воздушных целей, имеющих различные скорости, и сигнально-помеховой обстановки оператор РЛС назначает тот или иной режим защиты от пассивных помех, который соответствует определенной ширине зоны режекции пассивных помех. Код «режима защиты от пассивных помех» поступает на вход процессора обработки сигналов 6.
В процессоре обработки сигналов 6 в зависимости от выбранного оператором РЛС «режима защиты от пассивных помех» формируется матрица  размером М×М, где М - число используемых для аппроксимации пассивной помехи синусоид, которые с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления, а элементы Fn(ƒm) матрицы
размером М×М, где М - число используемых для аппроксимации пассивной помехи синусоид, которые с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления, а элементы Fn(ƒm) матрицы  определяются значением комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm,
определяются значением комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm, 
Затем в процессоре обработки сигналов 6 осуществляется формирование вектора F0 размером М×1, элементы которого F0(ƒm) определяются значением комплексной частотной характеристики доплеровского фильтра, в котором осуществляется подавление (компенсация) пассивных помех на частотах ƒm,  и рассчитывают весовой вектор b размером М×1 согласно выражению
и рассчитывают весовой вектор b размером М×1 согласно выражению 
Далее в процессоре обработки сигналов 6 составляется вектор и размером M×1, элементами которого um,s являются комплексные сигналы (напряжения) на выходе доплеровских фильтров с номерами  и вычисляют величину Δ согласно выражению
и вычисляют величину Δ согласно выражению

где Т - знак транспонирования вектора; u0,s - комплексный сигнал (напряжение) в s-ом стробе дальности на выходе доплеровского фильтра, в котором осуществляется подавление (компенсация) пассивных помех, сравнивают модуль величины Δ с заданным порогом η, при превышении которого принимают решение о наличии движущейся цели.
Подтверждение получения вышеуказанного технического результата при осуществлении предлагаемого способа проводилось путем обработки данных, полученных в ходе натурного эксперимента. Записи отраженных сигналов от малоразмерной движущейся воздушной цели на фоне пассивных помех различной интенсивности обрабатывались параллельно на основе способа-прототипа и предлагаемым в изобретении способом.
На фиг. 3-6 приведены диаграммы, демонстрирующие сравнительную эффективность селекции движущейся цели для способа-прототипа и предлагаемого в изобретении способа для пассивных помех с различной шириной спектра и мощностью.
На фиг. 3-6 по оси абсцисс отложено нормированное к частоте повторения импульсов Fи значение текущей частоты Доплера ƒ сигналов ƒ/Fи, а по оси ординат - нормированное значение амплитуды в децибелах. В представленных на фиг. 3-6 АЧС сигналов пассивных помех и шумов присутствует также сигнал малоразмерной движущейся воздушной цели с нормированной к частоте повторения импульсов доплеровской частотой цели Fдц/Fи=-0,13.
На фиг. 3 представлены АЧС сигналов (пассивной помехи, шумов и движущейся цели), поступающих на входы систем СДЦ, реализующих способ-прототип и предлагаемый способ. На фиг. 3а показан АЧС мешающих сигналов при отношении помеха/шум 25 дБ. Из фиг. 3а видно, что уровень шума превышен только главным лепестком спектра пассивной помехи, который расположен в области нулевой доплеровской частоты.
На фиг. 3б показан АЧС мешающего сигнала при отношении помеха/шум 60 дБ. Из фиг. 3б видно, что за счет большой мощности пассивной помехи ее амплитуда существенно превышает амплитуду шума как по главному, так и по боковыми лепестками спектра.
На фиг. 4 приведены АЧС выходных сигналов систем СДЦ для способа прототипа (см. фиг. 4а) и предлагаемого способа (см. фиг. 4б) при отношении помеха/шум 25 дБ (см. фиг. 3а) и нормированной ширине зоны режекции ΔF/Fи=0,01. Из фиг. 4а и 4б видно, что пассивная помеха подавлена и сигнал малоразмерной движущейся цели обнаруживается в обоих случаях.
На фиг. 5 приведены АЧС выходных сигналов систем СДЦ для способа прототипа (см. фиг. 5а) и предлагаемого способа (см. фиг. 5б) при отношении помеха/шум 60 дБ (см. фиг. 3б) и нормированной ширине зоны режекции ΔF/Fи=0,1. Из фиг. 5а видно, что в этом случае способ-прототип не обеспечивает подавление пассивных помех, поскольку ее выходной АЧС содержит нескомпенсированные остатки пассивных помех во всей полосе частот. Сигнал движущейся цели не обнаруживается. Это доказывает недостаточную эффективность способа-прототипа при увеличении мощности и ширины спектра пассивных помех.
Из фиг. 5б видно, что для предлагаемого в изобретении способа пассивная помеха подавлена и сигнал малоразмерной движущейся цели обнаруживается. В АЧС выходного сигнала пассивная помеха подавлена во всей зоне режекции, а полезный сигнал отчетливо выделяется на фоне шума. Измеренная нормированная доплеровская частота сигнала цели Fдц/Fи составила минус 0,13, а в выходном АЧС в области главного лепестка спектра пассивной помехи сформировался глубокий провал.
На фиг. 6 представлены результаты двумерной азимутально-дальностной обработки сигналов системы СДЦ для способа-прототипа и предлагаемого способа. Отношение помеха/шум составляло 60 дБ, а нормированная ширина зоны режекции ΔF/Fи=0,1. Сигнал малоразмерной движущейся воздушной цели расположен во втором стробе дальности.
На фиг. 6а представлен сигнал на входе системы СДЦ. Из фиг. 6а видно, что мощные переотражения от пассивных помех не позволяют обнаружить сигнал малоразмерной движущейся цели.
На фиг. 6б представлен сигнал на выходе системы СДЦ при его обработке способом-прототипом, а на фиг. 6в - предлагаемым способом. Из фиг. 6б видно, что способ-прототип не позволяет эффективно осуществить селекцию движущейся цели в указанных условиях. Из фиг. 6в следует, что предлагаемый способ обеспечивает эффективное подавление пассивной помехи и выделение сигнала малоразмерной движущейся цели. Это доказывает решение задачи изобретения.
Использование изобретения в когерентно-импульсных и импульсно-доплеровских РЛС не потребует изменения их принципов построения, режимов работы, существенных вычислительных затрат и позволит с высокой эффективностью обнаруживать движущиеся цели на фоне пассивных помех различного происхождения (отражений от подстилающей поверхности, метеообразований, облаков диполей и т.д.).
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Плекин В.Я. Цифровые устройства селекции движущихся целей. М.,Сайн-пресс, 2003.
2. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. под общей ред. B.C. Вербы. В 2 книгах. Книга 1. - Москва: Техносфера, 2014.
3. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. - М: Радио и связь, 1986.
4. Справочник по радиолокации. Под ред. М. Сколника. Т. 3. М.: Сов. радио, 1979.
5. Абраменков В.В., Васильченко О.В., Муравский А.П. Обоснование подхода к построению системы СДЦ РЛС обнаружения малоразмерных беспилотных летательных аппаратов // Журнал Сибирского федерального университета. Серия: техника и технологии. 2019. Т. 12. №7.
6. Патент РФ №2593276 (приоритет от 04.08.2015 г.) МПК G01S 7/36.
7. Абраменков В.В., Васильченко О.В. Структура выборочной корреляционной матрицы помехи многоканального измерителя при различных соотношениях между числом помеховых сигналов и числом компенсационных каналов // Информационно-измерительные и управляющие системы. 2012. Т. 10. №1.
8. Радиоэлектронные системы: основы построения и теория. Справочник. Изд. 2-е, перераб. и доп./ Под ред. Я.Д. Ширмана. М., Радиотехника, 2007.
9. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М., Радио и связь, 2003.
10. Марпл-мл. С.Л. Цифровой спектральный анализ и его приложения: Пер. с англ. М., Мир, 1990.
11. Финкельштейн М.И. Основы радиолокации. М., Сов. радио и связь, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2015 |
|
RU2593276C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| Способ когерентного накопления пачки отраженных сигналов в сканирующей радиолокационной станции | 2022 |
|
RU2798025C1 |
| МНОГОКАНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ ПРИЕМНОЕ УСТРОЙСТВО С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2439609C2 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |



Изобретение относится к радиолокации и может быть использовано в когерентно-импульсных, импульсно-доплеровских радиолокационных станциях (РЛС), осуществляющих обнаружение движущихся целей на фоне пассивных помех различного происхождения, например, отражений от подстилающей поверхности, метеообразований, облаков диполей, с использованием систем селекции движущихся целей (СДЦ). Техническим результатом является повышение эффективности селекции движущихся целей при увеличении мощности и ширины спектра пассивных помех. В заявленном способе антенной РЛС принимают пачку из N импульсов, выделяют квадратурные составляющие комплексной огибающей принятой пачки сигналов, в каждой из которых преобразуют сигналы в цифровую форму. Из полученных комплексных цифровых отсчетов принятой пачки из N импульсов в стробе дальности составляют вектор входных данных Y размером N×1, над которым осуществляют межпериодную фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ). Рассчитывают весовой вектор b размером М×1, элементы которого определяются значением комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm, М - число используемых для аппроксимации пассивной помехи синусоид, которые с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления, а также значением комплексной частотной характеристики доплеровского фильтра, в котором осуществляется подавление пассивных помех на частотах ƒm. Вычисляют величину Δ согласно выражению  где u0,s - комплексный сигнал в s-м стробе дальности на выходе доплеровского фильтра, в котором осуществляется подавление пассивных помех, u - вектор, элементами um,s которого являются комплексные сигналы на выходе доплеровских фильтров с номерами
где u0,s - комплексный сигнал в s-м стробе дальности на выходе доплеровского фильтра, в котором осуществляется подавление пассивных помех, u - вектор, элементами um,s которого являются комплексные сигналы на выходе доплеровских фильтров с номерами  в s-м стробе дальности, Т - знак транспонирования вектора, сравнивают модуль величины Δ с заданным порогом η, при превышении порога принимают решение о наличии движущейся цели. 6 ил.
в s-м стробе дальности, Т - знак транспонирования вектора, сравнивают модуль величины Δ с заданным порогом η, при превышении порога принимают решение о наличии движущейся цели. 6 ил.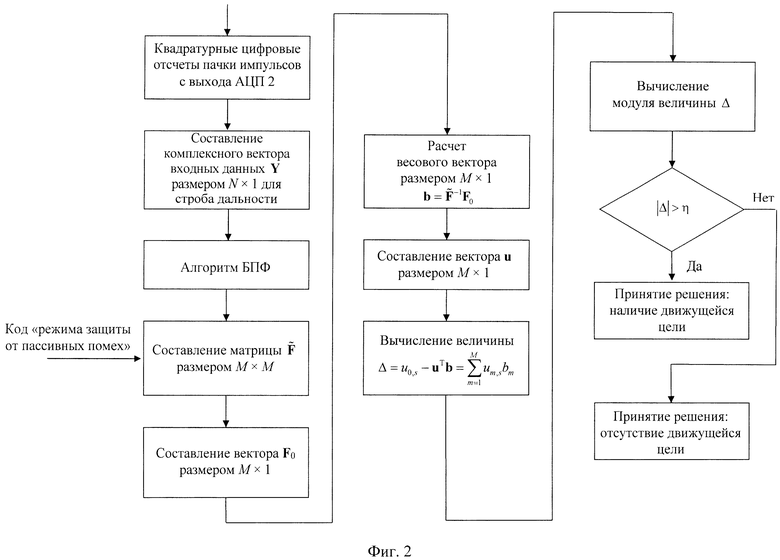
Способ селекции движущихся целей, заключающийся в том, что принимают антенной радиолокационной станции пачку из N импульсов, выделяют квадратурные составляющие комплексной огибающей принятой пачки сигналов, в каждой квадратурной составляющей осуществляют преобразование сигналов в цифровую форму, из полученных комплексных цифровых отсчетов принятой пачки из N импульсов в стробе дальности составляют вектор входных данных Y размером N×1, отличающийся тем, что над вектором Y осуществляют межпериодную фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ), рассчитывают весовой вектор b размером М×1 согласно выражению

где  - матрица размером M×M, элементы которой Fn(ƒm) определяются значением комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm,
- матрица размером M×M, элементы которой Fn(ƒm) определяются значением комплексной частотной характеристики n-го доплеровского фильтра на частоте пассивной помехи ƒm,  М - число используемых для аппроксимации пассивной помехи синусоид, которые с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления; F0 - вектор размером М×1, элементы которого определяются значением комплексной частотной характеристики доплеровского фильтра, в котором осуществляется подавление (компенсация) пассивных помех на частотах ƒm,
М - число используемых для аппроксимации пассивной помехи синусоид, которые с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления; F0 - вектор размером М×1, элементы которого определяются значением комплексной частотной характеристики доплеровского фильтра, в котором осуществляется подавление (компенсация) пассивных помех на частотах ƒm,  вычисляют величину Δ согласно выражению
вычисляют величину Δ согласно выражению
где u0,s - комплексный сигнал в s-м стробе дальности на выходе доплеровского фильтра, в котором осуществляется подавление пассивных помех, u - вектор размером M×1, элементами um,s которого являются комплексные сигналы на выходе доплеровских фильтров с номерами в s-м стробе дальности, Т - знак транспонирования вектора, сравнивают модуль величины Δ с заданным порогом η, при превышении порога принимают решение о наличии движущейся цели.
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2015 |
|
RU2593276C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| Устройство автоматической защиты импульсно-доплеровских радиолокационных станций от пассивных помех и способ его осуществления | 2021 |
|
RU2762375C1 |
| ФИТАСОВ Е.С., ОРЛОВ И.Я., НАСОНОВ В.В., БЕССОНОВА Е.В., КОЗЛОВ С.А | |||
| Квазиоптимальный проекционный метод доплеровской фильтрации радиолокационных сигналов // Известия вузов | |||
| Радиофизика | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Т | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Сс | |||

