Предлагаемая радиолокационная станция (РЛС) автоматического сопровождения цели по направлению относится к системам для определения направления или отклонения от заданного направления с конической разверткой луча, использующим сигналы, несущие информацию об отклонении направления приема от оси развертки луча, и может быть использована для создания систем измерения координат цели, в том числе наземных.
Наиболее близкой по технической сущности к предлагаемой РЛС является радиолокационная станция автоматического сопровождения цели по направлению (Бакулев П.А. «Радиолокация движущихся целей». М., Сов. радио, 1964, стр.174, рис.2.57), выбранная в качестве прототипа.
Устройство-прототип содержит последовательно соединенные антенну, приемник, фильтр доплеровских частот, амплитудный детектор, первый фильтр частоты сканирования, первый фазовый детектор и блок управления антенной, выход которого подключен к входу антенны, генератор опорного напряжения, вход которого подключен ко второму выходу антенны, а выход ко второму входу первого фазового детектора.
Недостатком прототипа является низкая точность сопровождения вследствие влияния пассивных помех на работу радиолокационной станции.
В большинстве случаев распределенные в пространстве отражатели, формирующие сигнал пассивной помехи и попадающие в луч антенны, имеют различные удельные эффективные отражающие поверхности при различных пространственных положениях сканирующей диаграммы направленности антенны, т.е. они пространственно анизотропны по удельной эффективной отражающей поверхности. Мощность сигнала пассивной помехи в процессе пространственного сканирования луча антенны изменяется во времени в соответствии с изменением удельной эффективной отражающей поверхности распределенных отражателей, попадающих в разрешаемый объем при пространственном изменении положения сканирующей диаграммы направленности антенны. Эти изменения уровня принимаемого антенной сигнала пассивной помехи модулируют по амплитуде с частотой сканирования сигнал пассивной помехи на выходе детектора приемника.
Остатки сигнала пассивных помех, имеющего нестационарную дисперсию на выходе приемника и прошедшие через фильтр доплеровских частот, амплитудный детектор и первый фильтр частоты сканирования на сигнальный вход первого фазового детектора, ввиду регулярности изменения мощности пассивной помехи с частотой сканирования при пространственном сканировании диаграммы направленности антенны, создают на выходе первого фазового детектора помеховую составляющую управляющего напряжения, среднее значение которой на входе блока управления антенной отлично от нуля, в результате чего под действием этого управляющего напряжения ось антенны смещается с направления на цель до тех пор, пока результирующее управляющее напряжение не станет равным нулю. В результате этого имеется систематическая ошибка углового рассогласования между равносигнальным направлением и направлением на цель, обусловленная влиянием пассивных помех на работу станции, что снижает точность сопровождения цели по направлению станцией автоматического сопровождения цели по направлению.
Задачей изобретения является повышение точности сопровождения цели по направлению за счет снижения влияния пассивных помех на работу РЛС путем компенсации ошибочной смещенной оценки углового положения цели, обусловленной воздействием пространственно анизотропной по удельной эффективной отражающей поверхности пассивной помехи.
Сущность изобретения заключается в том, что в РЛС автоматического сопровождения цели по направлению, содержащую последовательно соединенные антенну, приемник, фильтр доплеровских частот, амплитудный детектор, первый фильтр частоты сканирования и первый фазовый детектор, блок управления антенной, выход которого подключен к входу антенны, генератор опорного напряжения, вход которого подключен ко второму выходу антенны, а выход ко второму входу первого фазового детектора, в отличие от прототипа, введены последовательно соединенные второй фильтр частоты сканирования, вход которого подключен к выходу приемника, второй фазовый детектор, блок масштабирования и блок компенсации, второй вход которого подключен к выходу первого фазового детектора, а выход подключен к входу блока управления антенной, при этом второй вход второго фазового детектора подключен к выходу генератора опорного напряжения.
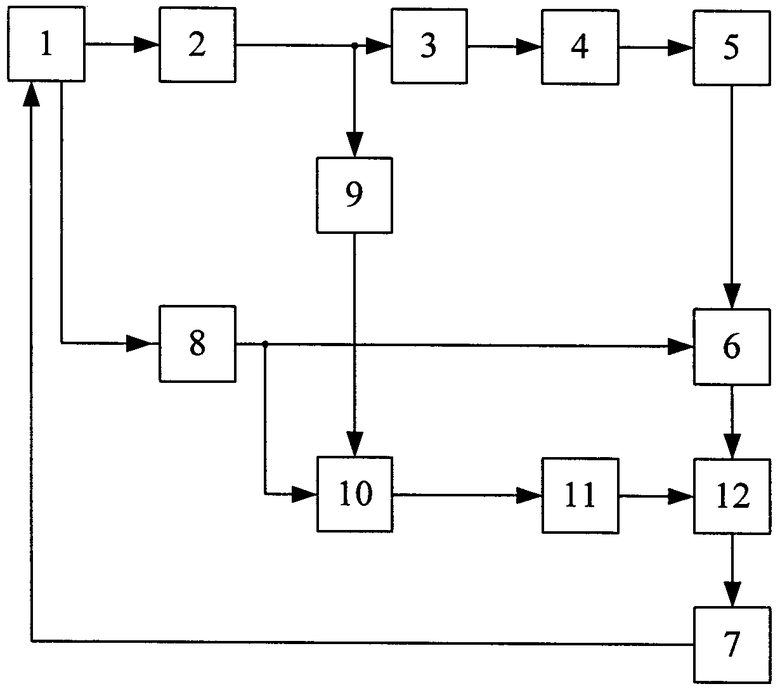
На чертеже представлена структурная электрическая схема предлагаемой РЛС автоматического сопровождения цели по направлению, где:
1 - антенна;
2 - приемник;
3 - фильтр доплеровских частот;
4 - амплитудный детектор;
5 - первый фильтр частоты сканирования;
6 - первый фазовый детектор;
7 - блок управления антенной;
8 - генератор опорного напряжения;
9 - второй фильтр частоты сканирования;
10 - второй фазовый детектор;
11 - блок масштабирования;
12 - блок компенсации.
РЛС автоматического сопровождения цели по направлению содержит последовательно соединенные антенну 1, приемник 2, фильтр доплеровских частот 3, амплитудный детектор 4, первый фильтр частоты сканирования 5 и первый фазовый детектор 6, блок управления антенной 7, выход которого подключен к входу антенны 1, генератор опорного напряжения 8, вход которого подключен к выходу антенны 1, а выход ко второму входу первого фазового детектора 6.
В отличие от прототипа в РЛС автоматического сопровождения цели по направлению введены последовательно соединенные второй фильтр частоты сканирования 9, вход которого подключен к выходу приемника 2, второй фазовый детектор 10, блок масштабирования 11 и блок компенсации 12, второй вход которого подключен к выходу первого фазового детектора 6, а выход подключен к входу блока управления антенной 7. При этом второй вход второго фазового детектора 10 подключен к выходу генератора опорного напряжения 8.
Предлагаемая РЛС автоматического сопровождения цели по направлению работает следующим образом. Работа РЛС автоматического сопровождения цели по направлению с коническим сканированием в азимутальном и угломестном каналах аналогична, поэтому рассмотрим работу РЛС в одной плоскости, например в азимутальной.
Антенна 1 формирует в пространстве луч диаграммы направленности, отклоненный от оси антенной системой на некоторый угол, равный примерно половине ширины диаграммы направленности антенны, который вращается относительно оси антенны. При вращении луч образует в пространстве равносигнальное направление (ось), совпадающее с осью антенны. Зондирующие радиоимпульсы (формируемые передатчиком, на схеме не показанным), отраженные от цели и пространственно распределенных отражателей, находящихся в разрешаемом объеме одновременно с целью, принимаются антенной, усиливаются и детектируются на низкую частоту в приемнике 2.
При наличии в одном разрешаемом объеме движущейся цели и распределенных отражателей результирующий сигнал биений на выходе приемника 2 состоит из суммы сигналов движущейся цели и пассивных помех. Сигналы движущихся целей на выходе приемника 2 представляют собой модулированные по амплитуде частотой биений колебания с учетом доплеровского эффекта, которые затем выделяются в фильтр доплеровских частот 3.
При отклонении оси антенны от направления на цель амплитуда сигналов движущейся цели на выходе приемника 2 будет изменяться также и в зависимости от мгновенного положения диаграммы направленности антенны приблизительно по синусоидальному закону с частотой сканирования (вращения) диаграммы направленности антенны. При этом глубина амплитудной модуляции частотой сканирования зависит от величины углового рассогласования цели относительно оси антенны - равносигнального направления, а фаза этого модулирующего напряжения определяет направление отклонения. Огибающая модуляции с частотой сканирования однозначно определяет величину и направление отклонения цели от равносигнальной оси.
Если цель находится на равносигнальном направлении, то амплитуда сигнала цели на выходе приемника 2 не изменяется вследствие сканирования и модуляция их по амплитуде с частотой сканирования отсутствует, а имеется только модуляция вследствие доплеровского эффекта. Принятые сигналы распределенных отражателей, являющиеся пассивной помехой, вследствие отсутствия для них доплеровского эффекта имеют нулевую частоту биений на выходе приемника 2.
Ввиду того что сигнал пассивной помехи при сканирующей диаграмме направленности антенны формируют распределенные в пространстве различные отражатели, которые в большинстве случаев имеют различные эффективные отражающие поверхности, амплитуда сигнала пассивной помехи изменяется во времени в соответствии с изменением удельных эффективных отражающих поверхностей распределенных отражателей, попадающих в разрешаемый объем, при пространственном изменении положения сканирующей диаграммы направленности антенны. Эти амплитудные изменения сигнала пассивной помехи модулируют по амплитуде сигнал пассивной помехи на выходе детектора приемника 2.
Сигналы цели и пассивной помехи с выхода приемника 2 поступают на вход фильтра доплеровских частот 3, который имеет полосу пропускания от Fgmin (минимальной доплеровской частоты) до Fп/2 (половины частоты повторения зондирующих импульсов) и служит для выделения из спектра смеси сигналов цели и пассивной помехи на выходе приемника 2 спектральных составляющих сигнала движущейся цели. Спектральные составляющие пассивной помехи частично перекрываются с составляющими спектра цели, выделяемыми фильтром доплеровских частот 3. Поэтому часть сигнала пассивной помехи проходит на выход фильтра доплеровских частот 3 одновременно с сигналом цели.
С выхода фильтра доплеровских частот 3 сигнал поступает на амплитудный детектор 4, который выделяет огибающую амплитудной модуляции сигналов движущейся цели и пассивной помехи, прошедших через фильтр доплеровских частот 3, и далее сигнал подается на первый фильтр частоты сканирования 5. Резонансная частота настройки первого фильтра частоты сканирования 5 равна частоте сканирования луча антенны 1 в пространстве. Если цель находится на равносигнальном направлении, то амплитуда сигнала цели на выходе фильтра доплеровских частот 3 постоянна, и сигнал на выходе амплитудного детектора 4 постоянный, а сигнал цели на выходе первого фильтра частоты сканирования 5 равен нулю. На выход первого фильтра частоты сканирования 5 проходят также составляющие сигнала пассивной помехи, попадающие в полосу его пропускания, поступившие на его вход с выхода амплитудного детектора 4.
При отклонении равносигнального направления антенны от направления на цель, т.е. при наличии ошибки углового рассогласования направлений, амплитуда сигнала цели на выходе фильтра доплеровских частот 3 модулирована с частотой сканирования антенны. При этом глубина модуляции зависит от величины ошибки углового рассогласования, а фаза определяет направление рассогласования. Амплитудный детектор 4 выделяет огибающую амплитудной модуляции сигнала цели и подает ее на первый фильтр частоты сканирования 5. Напряжение на выходе первого фильтра частоты сканирования 5 однозначно определяет величину и направление отклонения цели от равносигнального направления и является напряжением сигнала ошибки. Напряжение с выхода первого фильтра частоты сканирования 5 содержит две составляющие. Одна составляющая обусловлена сигналом цели, а вторая помеховая составляющая обусловлена пассивной помехой, прошедшей на его выход. Напряжение с выхода первого фильтра частоты сканирования 5 подается на первый (сигнальный) вход первого фазового детектора 6, на второй вход которого напряжение подается от генератора опорного напряжения 8.
Генератор опорного напряжения 8 является генератором переменного тока, соединенным с механическим выходом антенны, например, на ось вращения вибратора антенны насажен ротор генератора переменного тока. Величина и фаза опорного напряжения в каждый момент времени однозначно связаны с пространственным положением луча сканирующей диаграммы направленности антенны.
На выходе первого фазового детектора 6 появляется напряжение постоянного тока, величина которого определяется, во-первых, величиной углового рассогласования между направлением на цель и равносигнальным направлением, а его знак зависит от направления рассогласования (в случае отсутствия углового рассогласования это напряжение равно нулю). Во-вторых, результат взаимодействия сигнала пассивной помехи с опорным напряжением - помеховая составляющая.
Напряжение помеховой составляющей содержит флюктуационную составляющую, математическое ожидание которой равно нулю, и постоянную составляющую, отличную от нуля, обусловленную регулярным изменением мощности отраженного сигнала пассивной помехи при сканировании диаграммы направленности антенны, которая создает ошибочную смещенную оценку углового положения цели.
Напряжение с выхода первого фазового детектора 6 поступает на второй вход блока компенсации 12.
С выхода приемника 2 сигналы цели и пассивной помехи одновременно поступают на вход второго фильтра частоты сканирования 9, который имеет центральную частоту пропускания, равную частоте сканирования антенны, и узкую полосу пропускания. В полосу пропускания этого фильтра 9 попадают только спектральные составляющие пассивной помехи, напряжение которой затем поступает на первый (сигнальный) вход второго фазового детектора 10, на второй (опорный) вход которого подается напряжение от генератора опорного напряжения 8. Сигнал на выходе фазового детектора 10 содержит флюктуационную составляющую, математическое ожидание которой равно нулю, и постоянную составляющую, отличную от нуля, обусловленную регулярным изменением мощности отраженного сигнала пассивной помехи при сканировании диаграммы направленности антенны.
Выделенная постоянная составляющая этого сигнала используется для компенсации ошибочной смещенной оценки углового положения цели, обусловленной воздействием пространственно нестационарной пассивной помехи. Она подается на вход блока масштабирования 11, который может быть выполнен в виде усилителя с заданным коэффициентом усиления, для изменения величины компенсирующего сигнала с учетом известной аппроксимации формы спектра пассивной помехи в полосе фильтра доплеровских частот 3.
Выходной сигнал блока масштабирования 11 имеет величину, равную величине сигнала систематической ошибки (смещенной оценки) на выходе первого фазового детектора 6, обусловленной воздействием пространственно нестационарной пассивной помехи. С выхода блока масштабирования 11 сигнал подается на первый вход (вычитаемого) блока компенсации 12, на сигнальный вход которого подается сигнал с выхода первого фазового детектора 6. В блоке компенсации 12, который может быть выполнен в виде блока вычитания, осуществляется вычитание сигнала систематической ошибки из сигнала с выхода фазового детектора 6. Полученное управляющее напряжение, которое уже не содержит помеховой составляющей смещенной оценки, с выхода блока компенсации 12 поступает на вход блока управления антенной 7, который поворачивает антенну до тех пор, пока управляющее напряжение не станет равным нулю, т.е. пока не ликвидируется угловое рассогласование между направлением на цель и равносигнальным направлением. Блок управления антенной 7 может быть выполнен в виде последовательно соединенных усилителя, двигателя и редуктора (Бакулев П.А. Методы и устройства селекции движущихся целей. М., Радио и связь, 1986, стр.67, рис.2.37).
Предлагаемое техническое решение обеспечивает повышение точности сопровождения цели по направлению за счет снижения влияния пассивных помех на работу РЛС путем компенсации ошибочной смещенной оценки углового положения цели, обусловленной воздействием пространственно анизотропной по удельной эффективной отражающей поверхности пассивной помехи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| ПРИЕМНАЯ СИСТЕМА ДЛЯ МАЛОВЫСОТНОЙ РЛС ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ИНТЕНСИВНЫХ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2040007C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
Изобретение может быть использовано для создания систем измерения координат цели, в том числе наземных. Радиолокационная станция содержит антенну, приемник, фильтр доплеровских частот, амплитудный детектор, два фильтра частоты сканирования, два фазовых детектора, блок управления антенной, генератор опорного напряжения, блок масштабирования и блок компенсации, определенным образом соединенные между собой. Достигаемый технический результат изобретения - повышение точности сопровождения цели по направлению за счет снижения влияния пассивных помех на работу РЛС путем компенсации ошибочной смещенной оценки углового положения цели, обусловленной воздействием пространственно анизотропной по удельной эффективной отражающей поверхности пассивной помехи. 1 ил.
Радиолокационная станция автоматического сопровождения цели по направлению, содержащая последовательно соединенные антенну, приемник, фильтр доплеровских частот, амплитудный детектор, первый фильтр частоты сканирования и первый фазовый детектор, блок управления антенной, выход которого подключен к входу антенны, генератор опорного напряжения, вход которого подключен ко второму выходу антенны, а выход ко второму входу первого фазового детектора, отличающаяся тем, что в нее введены последовательно соединенные второй фильтр частоты сканирования, вход которого подключен к выходу приемника, второй фазовый детектор, блок масштабирования и блок компенсации, второй вход которого подключен к выходу первого фазового детектора, а выход подключен к входу блока управления антенной, при этом второй вход второго фазового детектора подключен к выходу генератора опорного напряжения.
| БАКУЛЕВ П.А | |||
| Радиолокация движущихся целей | |||
| - М.: Советское радио, 1964, с.174, рис.2.57 | |||
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| RU 2004113774 А, 27.10.2005 | |||
| Фазометрический одноканальный автоматический радиопеленгатор | 1976 |
|
SU583673A1 |
| US 4338603 A, 06.07.1982 | |||
| US 4224622 A, 23.09.1980 | |||
| US 3789405 A, 29.01.1974. | |||

