Изобретение относится к области сейсмической разведки и может быть использовано для целеуказания различным средствам поражения, в устройствах управления подрывом инженерных боеприпасов, а также для контроля несанкционированного доступа к охраняемым объектам.
Общеизвестны некоторые сейсмометрические способы оценки текущей величины азимутального угла подвижного наземного объекта с использованием результатов регистрации сейсмических сигналов, генерируемых этим объектом в поверхностном слое почвы. В них в качестве чувствительных элементов используются группы устанавливаемых в грунт сейсмических приёмников (сенсоров), то есть используются варианты способа разнесённой пассивной локации. При этом основным информационным признаком для определения направления на объект является функция взаимной корреляции сигналов в парах каналов обработки сигналов. По величине задержки сигнала в них принимается решение о величине азимутального угла.
Например, в [1] заявлен способ, предусматривающий объединение в одном сейсмическом детекторе двух или трех пар, разделенных расстоянием сейсмических сенсоров, ориентированных под углом друг к другу, и последующую обработку полученных сейсмических данных с целью определения направления на источник сейсмического возмущения. В этом способе производят циклическую одновременную обработку сейсмосигналов в каждой паре сенсоров. Причём в каждом цикле обработки вычисляют взаимную корреляцию во временном интервале Т. Для каждой пары сенсоров в каждом цикле выбирают максимальное значение взаимокорреляции Rmax и соответствующие им значения временного сдвига ΔТ. При этом анализируют поток выбранных значений Rmax и сейсмическое событие определяют, как значимое, если выбранные значения взаимокорелляции хотя бы для одной пары сенсоров превысят текущий уровень взаимокорреляции шума в 2-3 раза, после чего на протяжении времени Тmax ищут максимумы выбранных значений взаимокорреляции и запоминают соответствующие им значения временного сдвига ΔT для каждой из пар сенсоров с взаимно перпендикулярными осями чувствительности. Причем в случае обнаружения второго сопоставимого максимума значений взаимокорреляции Rmax запоминают значения временных сдвигов ΔТ, соответствующие второму максимуму значений взаимокорреляции. Направление на источник сигнала определяют, как направление векторной суммы одной или нескольких пар ортогональных (в общем случае неколлинеарных) векторов, соответствующих парам сенсоров, где направление каждого вектора есть направление от первого сенсора пары ко второму сенсору пары, а модуль вектора равен запомненному значению ΔT для распознанного сейсмического события по данной паре сенсоров. Для повышения точности вычисления направления на источник сейсмического события значения временного сдвига ΔТ для каждой пары сенсоров определяют, как среднее значение выборки в окрестности корреляционного максимума. Для определения азимута на источник сейсмического события на плоскости находят временной сдвиг по двум парам сенсоров, размещенных по ортогональным осям Х и Y. Азимутальный угол на плоскости определяют, как arctg(ΔТy/ΔТх), где ΔТy и ΔТх – запомненные задержки по осям Y и Х соответственно.
К основным недостаткам при реализации данного способа можно отнести аппаратную избыточность, которая заключается в необходимости использования нескольких разнесённых сенсоров. Также для повышения точности определения задержки сигнала в паре каналов используется многоканальный интегратор. Необходимы два аналого-цифровых преобразователя, устанавливаемые на выходе двух полосовых фильтров. Кроме того, в этом способе предусмотрено измерение скорости распространения сейсмических колебаний в почве, а для этого используется дополнительное техническое средство для создания эталонного сейсмического возмущения и измерения скорости сейсмической волны от этого возмущения.
В [2] описана работа устройства, характеризующая способ, в котором в исходном состоянии производится прием сейсмических сигналов тремя разнесенными в пространстве сенсорами. При этом третий сенсор устанавливается на некотором расстоянии от сейсмической базы L (не превышающем ширину этой базы), на равном от первых двух сенсоров расстоянии. Сейсмическая база L образована двумя первыми сенсорами. Сейсмосигналы с выходов первых двух сенсоров поступают в два канала обработки. Первый канал условно принимается в качестве опорного. В нём реализуется предварительная корреляционная обработка с соответствующей задержкой сейсмосигнала. Второй канал реализует корреляционную обработку этого же сейсмосигнала для нескольких значений временных задержек. Далее обработанные при разных временных задержках сейсмосигналы первого и второго каналов сравниваются между собой. Если их уровни одинаковы или мало различаются, то никакого решения об азимутальном угле не принимается и полагается, что в зоне обнаружения подвижный объект отсутствует, либо в этой зоне присутствует рассредоточенная в пространстве помеха. В случае появления в зоне обнаружения объекта уровни обработанных при разных временных задержках сейсмосигналов в каналах будут неодинаковы. Тогда решение о величине азимутального угла обнаруженного подвижного объекта принимается по критерию максимума взаимной корреляционной функции обработанных сигналов опорного и второго каналов. Сигнал с выхода третьего сенсора подвергается специальной обработке, в результате которой уточняется с какой стороны сейсмической базы L пришел сейсмосигнал.
Основным недостатком реализации способа здесь, как и в первом случае, является аппаратная избыточность, которая определяется необходимостью использования нескольких разнесённых в пространстве сенсоров. Также для повышения точности определения азимутального угла необходимо увеличивать количество отводов линии задержки и количество корреляторов во втором канале. При этом повышается сложность вычислений и увеличивается энергопотребление реализуемого устройства.
Наиболее близким аналогом по технической сущности к предлагаемому является способ, описанный в [3] и принятый за прототип.
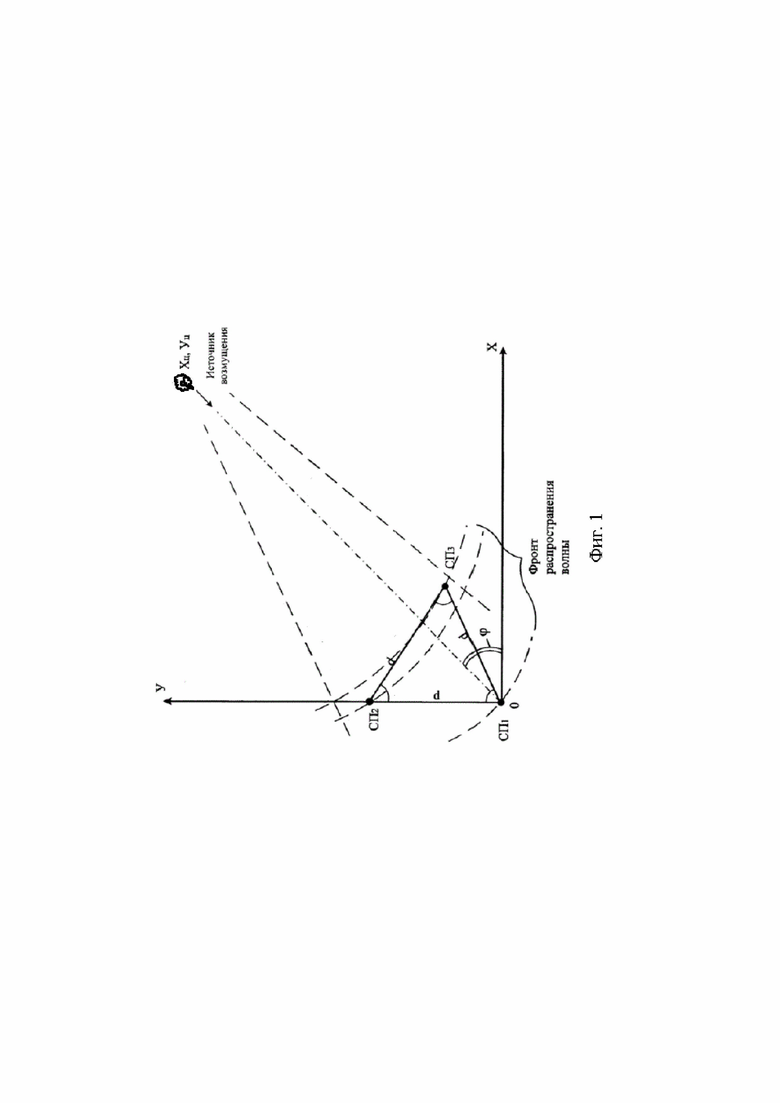
В способе-прототипе так же, как и в предыдущем аналоге – способе для приёма сейсмосигналов, предлагается использовать пространственное разнесение трёх сенсоров, которые должны располагаться в вершинах равностороннего треугольника со стороной d. На фиг. 1, взятой из описания прототипа, приведена схема размещения сейсмических сенсоров на местности. Они разбиты на две пары: одна пара сенсоров с номерами 1, 2 и вторая пара сенсоров с номерами 1, 3. В первом и втором каналах реализуется обработка двух пар сейсмосигналов, поступающих на их входы с выходов соответствующих пар сенсоров. Однако операции над сейсмосигналами в первом и втором каналах организуется иначе, чем в предыдущем способе. Вместо корреляционной обработки осуществляется селекция минимальных разностей сейсмосигналов и фиксация временных задержек, соответствующих им.
Сущность способа-прототипа заключается в осуществлении следующих операций:
- в первом канале на временном интервале tвс, который называется периодом обновления времени селекции, осуществляется n задержек сейсмосигналов y1,i(t) и y2, j(t+τi);
- определяются соответствующие разности Δτ12,ij = y2, j(t+τi) - y1,i(t);
- оценивается минимальное значение функции разности сейсмосигналов f(y1,i, y2, j)min;
- фиксируется соответствующее минимуму этой функции значение разности Δτ12;
- во втором канале на этом же временном интервале tвс осуществляется m задержек сейсмосигналов y1,i(t) и y3, j(t+τi);
- определяются соответствующие разности Δτ13,ij = y3, j(t+τi) - y1,i(t);
- оценивается минимальное значение функции разности сейсмосигналов f(y1,i, y3, j)min;
- фиксируется соответствующее минимуму этой функции значение разности Δτ13;
- в соответствии с формулой
определяется азимутальный угол.
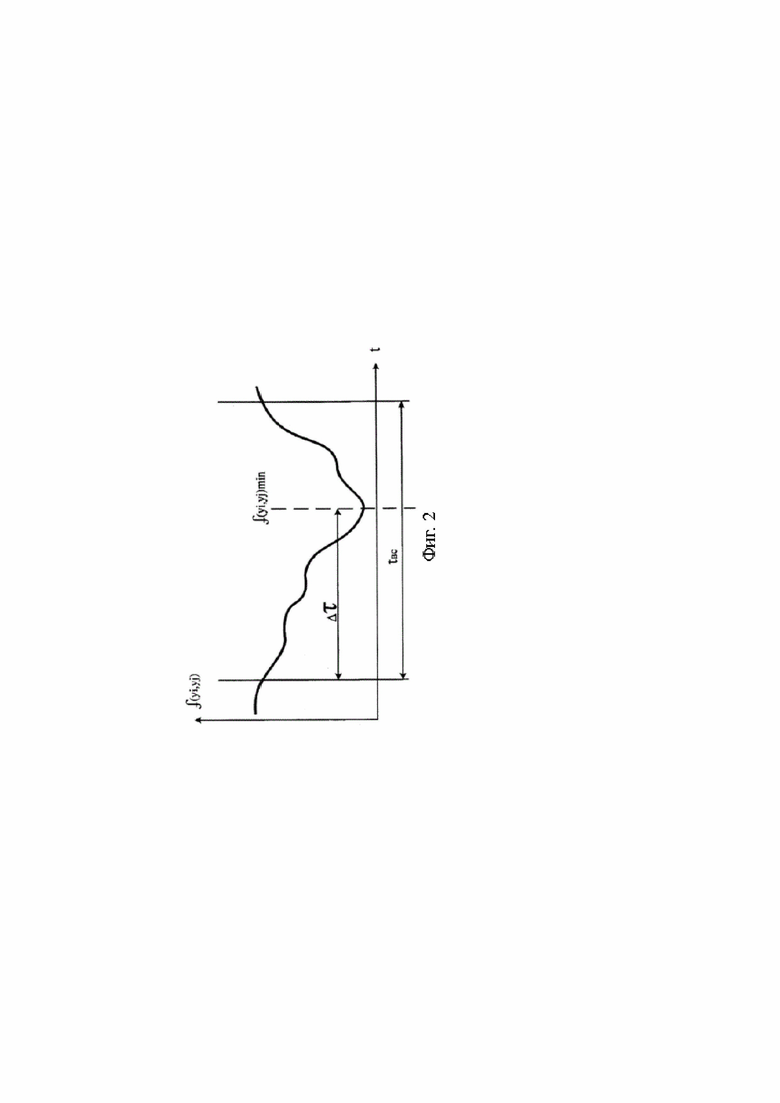
На фиг. 2, взятой из описания прототипа, приведен пример графика изменения функции разности сейсмосигналов с фиксацией минимального значения во временном интервале tвс и соответствующей ему временной задержки.
Предлагаемая замена корреляционной обработки в каналах селекцией минимальных разностей сейсмосигналов позволяет при заданном времени вычисления и определенном энергопотреблении реализуемого устройства увеличить число выходов линий задержек, что приведёт к повышению точности определения азимутального угла обнаруженного объекта по сравнению с предыдущими способами. Однако и число селекторов минимальной разности сигналов n и m в первом и во втором каналах также надо увеличивать соответственно.
Очевидно, что способ-прототип также не лишён основных недостатков, присущих описанным выше двум способам-аналогам, в которых для оценки азимутального угла обнаруженного объекта используется пространственное разнесение нескольких сенсоров.
Задача предлагаемого способа состоит в использовании информации, связанной с описанием поляризационной структуры сейсмических сигналов для снижения энергопотребления и аппаратной избыточности при реализации соответствующего устройства.
Для решения поставленной задачи, в способе пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком, включающем цифровую фильтрацию в частотной области отсчётов дискретизированных взаимно ортогональных компонент сейсмосигнала, поступивших на входы аналого-цифрового преобразователя с соответствующих выходов датчика, согласно изобретению, осуществляется восстановление отфильтрованных компонент во временной области, формирование на их основе элементов матрицы ковариации, которая используется для нахождения её собственных векторов и собственных значений, текущие отсчёты которых сглаживаются, сглаживание текущих отсчётов x- и y-компонент первого собственного вектора и трёх собственных значений матрицы ковариации, оценка с использованием сглаженных текущих отсчётов x- и y-компонент первого собственного вектора текущих значений азимутального угла подвижного наземного объекта относительно оси 0Х декартовой системы координат, оценка с использованием сглаженных отсчётов трёх собственных значений величины текущих отсчётов коэффициента эллиптичности «эллипса рассеяния», дополнительная фильтрация полученных текущих отсчётов азимутального угла и коэффициента эллиптичности.
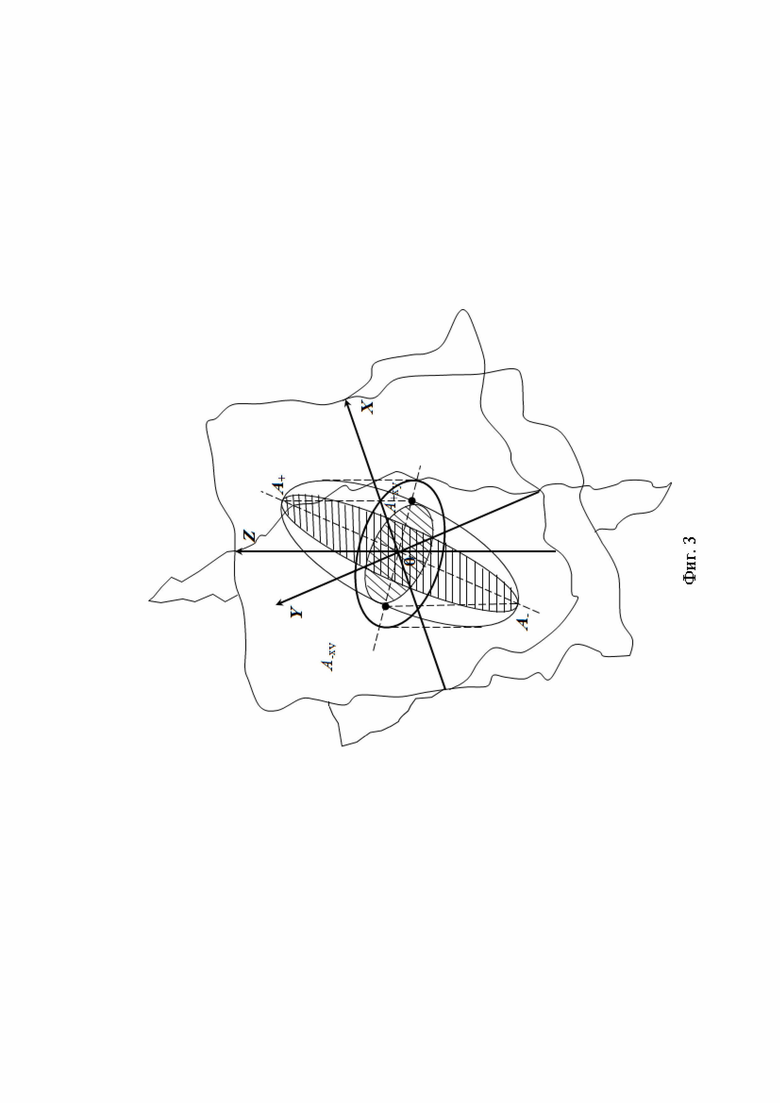
В предлагаемом способе используют информацию о поляризационной структуре сейсмосигналов, возбуждаемых в поверхностном слое почвы подвижными объектами наземной техники. В основе способа лежит измерение текущих значений взаимно ортогональных амплитуд Аx(t), Аy(t) и Аz(t) соответствующих компонент каких-либо сигналов, имеющих гармоническую природу, на некотором расстоянии от источника их возбуждения. Используя преобразования этих амплитуд, приведённые, например, в [4], можно на временных отрезках некоторой величины строить эллипсоиды в декартовой системе координат (ДСК), центр которой совмещён с центром масс трёхкомпонентного измерителя. Если на плоскость X0Y ДСК спроектировать текущие эллипсоиды, построенные на каждом из этих временных промежутков, то на этой плоскости ДСК окажутся эллипсы. Параметры этих эллипсов позволяют с определённой точностью оценивать текущее угловое положение источника этих квазигармонических сигналов относительно какой-либо из осей, лежащих в этой плоскости ДСК. Таким образом, текущее значение азимутального угла Ψ(t) (или пеленг на источник) определяется ориентацией проекции большой оси текущего эллипсоида на плоскость Х0Y ДСК относительно осей 0Y или 0Х. Эта проекция в среднем является большой осью эллипса, который является проекцией данного эллипсоида на плоскость Х0Y ДСК.
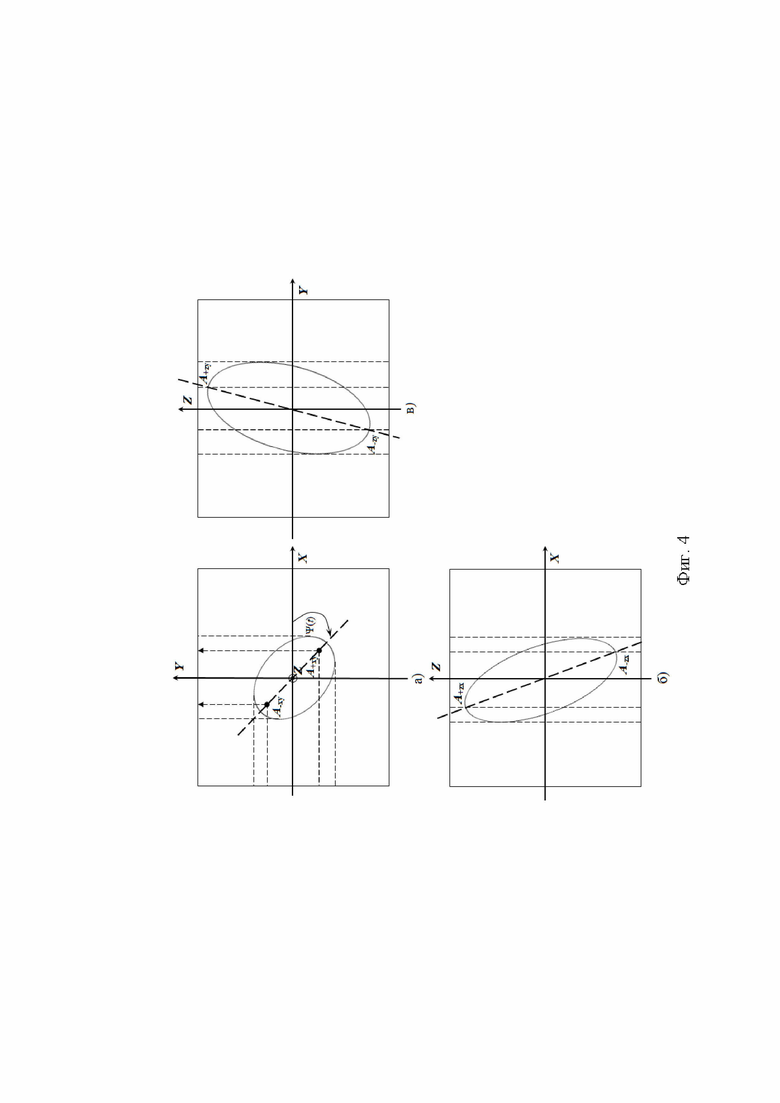
На фиг. 3 в качестве примера приведена иллюстрация некоторого эллипсоида, построенного в ДСК, начало которой связано с геометрическим центром данного эллипсоида. На этой иллюстрации выделена проекция эллипсоида на азимутальную плоскость X0Y ДСК, где жирными чёрными кружками отмечены проекции вершин эллипсоида, расположенные выше (A+xy) и ниже (A-xy) плоскости X0Y. Фиг. 4 иллюстрирует все три проекции эллипсоида на соответствующие плоскости ДСК. Из анализа фиг. 4 следует, что проекция, представленная на рисунке 4а), является основной, так как значения параметров эллипса, представленного на ней (угол ориентации относительно какой-либо из осей 0X или 0Y ДСК, коэффициент эллиптичности), однозначно связаны с параметрами проекций эллипсоида на остальные плоскости ДСК. При этом следует иметь ввиду, что углы в ДСК отсчитываются следующим образом: положительные значения - относительно какой-либо оси от 0° до 180° против часовой стрелки, а отрицательные значения относительно этой же оси также от 0° до 180°, но по часовой стрелке.
Исходя из вышесказанного, в дальнейшем достаточно будет использовать только проекцию эллипсоида на азимутальную плоскость X0Y ДСК.
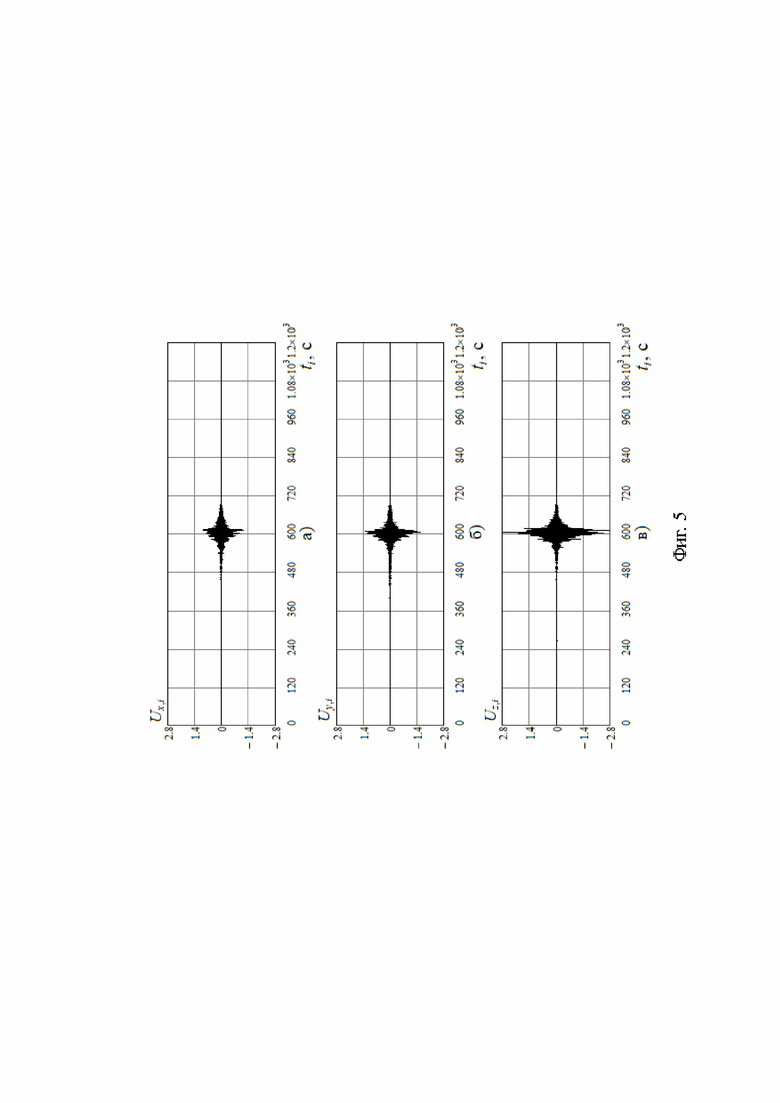
В предлагаемом способе пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком, как и в способе-прототипе, необходимо использовать обработку трёх сейсмосигналов, которые являются взаимно ортогональными компонентами единого сейсмосигнала, снимаемыми с соответствующих выходов трёхкомпонентного сейсмического датчика, созданного на базе трёх линейных сейсмических сенсоров, оси чувствительности которых взаимно ортогональны и имеют единый фазовый центр. В качестве примера на фиг. 5 представлены зарегистрированные трёхкомпонентным геофоном GS-3 в полосе до 150 Гц и дискретизированные с частотой дискретизации fд = 1000 Гц взаимно ортогональные компоненты сейсмосигнала, возбуждённого в поверхностном слое почвы лёгким гусеничным подвижным объектом наземной техники (тип ЛГТ). Центр ДСК связан с центром масс геофона GS-3. Положительное направление оси 0Х совмещено с направлением на географический север, оси 0Y – на восток, а оси 0Z – в зенит.
Далее используются методы цифровой фильтрации [5] и раздел аппарата матричного исчисления, связанный с нахождением собственных векторов и собственных значений трёхмерных матриц [4]. При этом для нахождения таких матриц, а также параметров текущего спроектированного на плоскость X0Y ДСК так называемого «эллипса рассеяния» используется методика, изложенная в [6, 7].
Таким образом, необходимо осуществить следующие операции.
1. Согласно [7], предварительную цифровую фильтрацию в полосе рабочих частот (15…19) Гц фильтром типа Баттерворта-Чебышева c амплитудно-частотной характеристикой (АЧХ) 
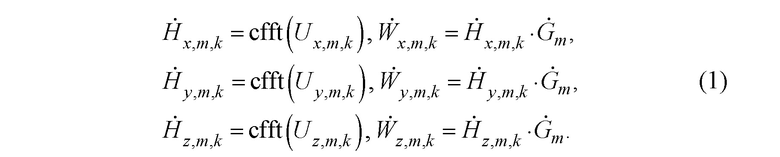
Здесь m = 1000 – количество отсчётов на промежутке времени в 1 секунду (скользящее временное окно), на котором осуществляется проектирование «эллипса рассеяния»; k – номер текущей секунды; cfft(•) – прямое быстрое дискретное преобразование Фурье (БДПФ); точка над текущей величиной означает её комплексность.
2. Обратное преобразование Фурье (icfft(•)) отфильтрованных в полосе (15…19) Гц частотных отсчётов (1) и взятие реальной части
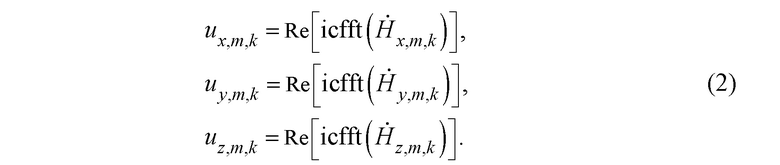
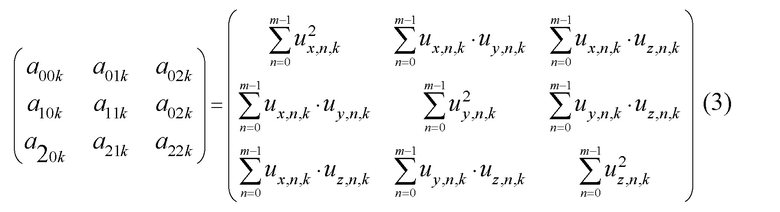
3. Формирование матрицы ковариаций
4. Сглаживание текущих значений элементов матрицы ковариаций медианным фильтром с глубиной сглаживания na, величина которой определяется конкретными условиями распространения сейсмосигнала

Здесь i = 0,1,2; j = 0,1,2.
5. Решается задача определения текущих собственных векторов и собственных значений с использованием ковариационной матрицы [6 - 8]

Из решения (5) находят три собственных вектора 

6. Вторичное сглаживание текущих значений x- и y-компонент собственного вектора 

Определение направления, задаваемого единичным вектором поляризации
7. С использованием текущих сглаженных компонент вектора 


8. С использование сглаженных собственных значений 

9. При необходимости текущие отсчёты азимутального угла (7) и коэффициента эллиптичности (8) можно дополнительно сгладить комплементарным фильтром, подбирая соответствующие значения коэффициентов усиления R1 и R2

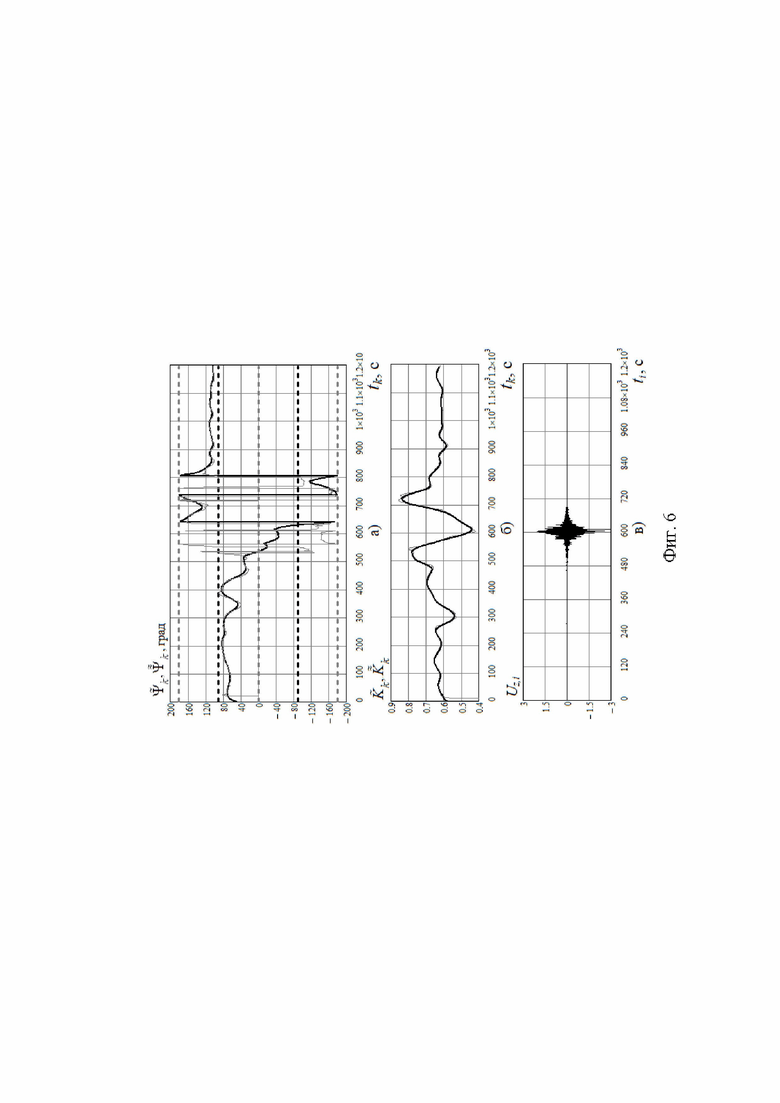
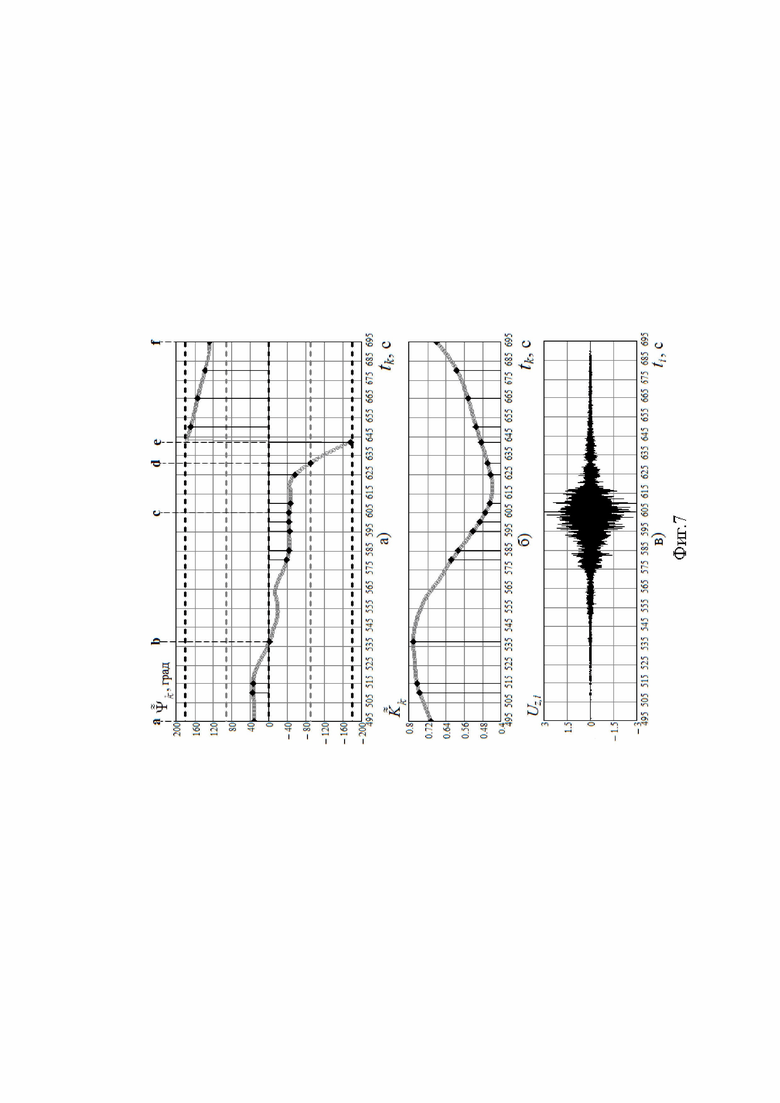
На фиг. 6 представлены оценки сглаженных с использованием медианного и комплементарного фильтров (эти фильтры реализуются программно) текущих отсчётов азимутального угла и коэффициента эллиптичности на протяжении всей записи: а) азимутальный угол относительно оси 0Х ДСК, б) коэффициент эллиптичности, в) запись z-компоненты для оценки положения точки траверза. Кривыми серого цвета на фиг. а) и б) обозначены аналогичные оценки, но сглаженные с использованием только медианного фильтра. Горизонтальные штриховые прямые серого и чёрного цвета на верхнем рисунке обозначают соответствующие уровни (сверху вниз): 180°, 90°, 0°, -90°и -180°.
Из анализа этой иллюстрации следует:
- начиная с некоторых достаточно больших расстояний в обе стороны от точки траверза текущие значения величин отсчетов, как азимутального угла, так и коэффициента эллиптичности либо имеют очень большой разброс, либо сохраняют практически неизменный средний уровень; первый случай будет характеризоваться неприемлемой величиной ошибок при оценке параметров эллипса; второй случай говорит о том, что подвижный объект находится на такой дальности от геофона, при которой его чувствительности не хватает для регистрации значений параметров, хотя бы ориентировочно относящихся к реальным;
- коэффициент эллиптичности является параметром, который менее подвержен воздействию внешних факторов, чем азимутальный угол, так как отклонение его сглаженных с использованием медианного и комплементарного фильтров значений от сглаженных с использованием только медианного фильтра на участке контрольно-измерительной трассы (КИТ) достаточно большой протяжённости очень мало. В то время как для азимутального угла отклонение сглаженных с использованием медианного и комплементарного фильтров значений от сглаженных с использованием только медианного фильтра значений гораздо больше, особенно в окрестностях пересечения кривыми нулевого уровня;
- минимальное текущее значение оценки величины коэффициента эллиптичности примерно соответствует моменту прохождения объектом точки траверза, когда энергия сейсмосигнала имеет максимальную величину;
- целесообразно выбирать временные границы, в которых осуществляются оценки параметров эллипсов, в тех пределах, в которых надёжность этих оценок будет удовлетворять практическим потребностям, то есть выделять ту временную область, в которой заключено минимальное значение коэффициента эллиптичности и зависимости, как коэффициента эллиптичности, так и угла ориентации носят достаточно монотонный характер, за исключением переходов, которые носят характер скачков: -180° … +180° или +180° … -180°.
Способ или методика выбора таких временных границ является отдельной задачей общего рабочего алгоритма, включающего в себя обнаружение и классификацию подвижных объектов наземной техники.
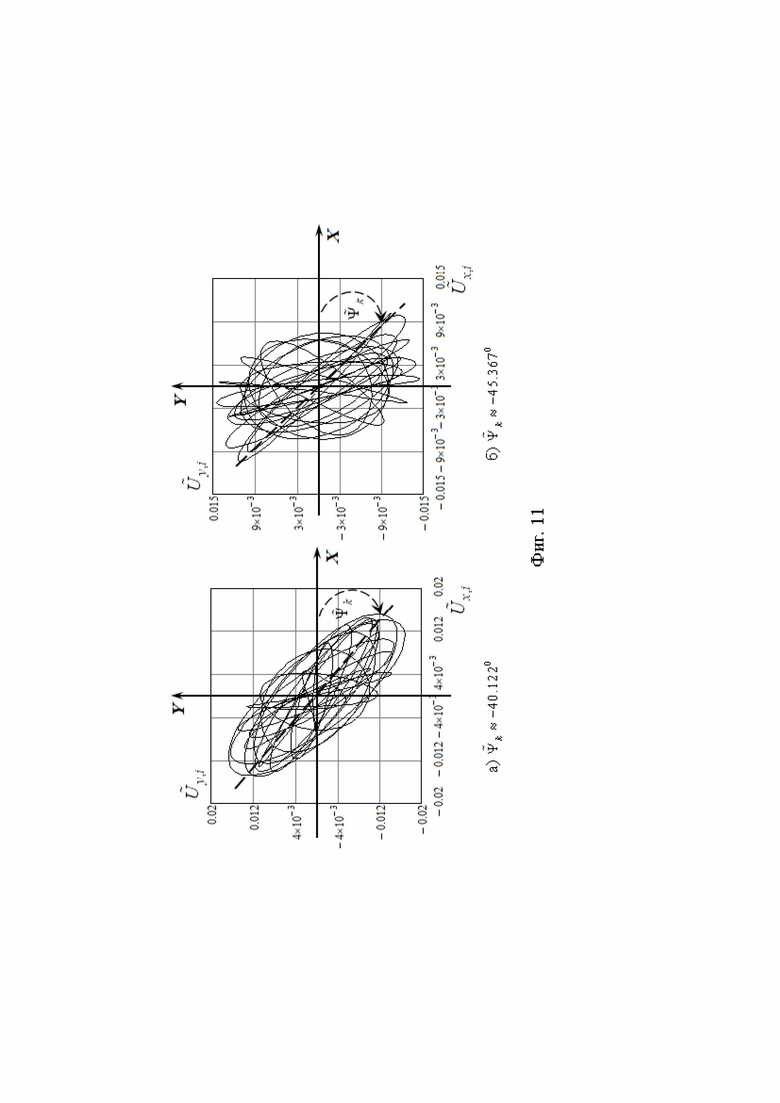
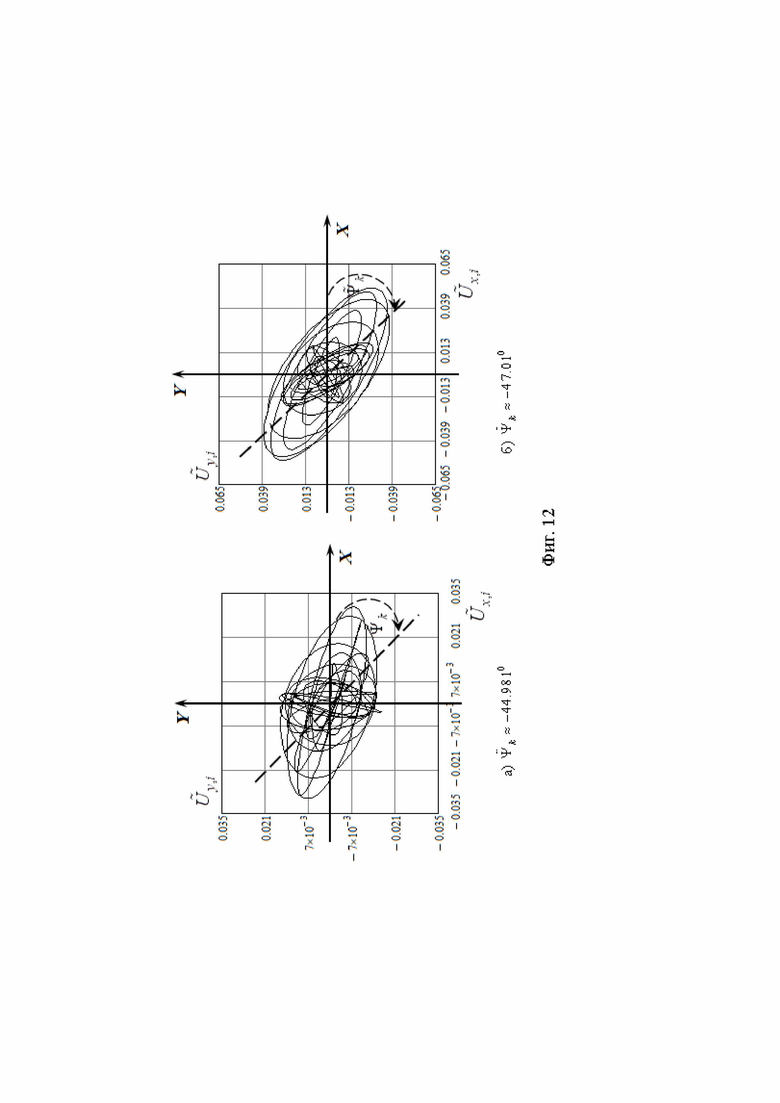
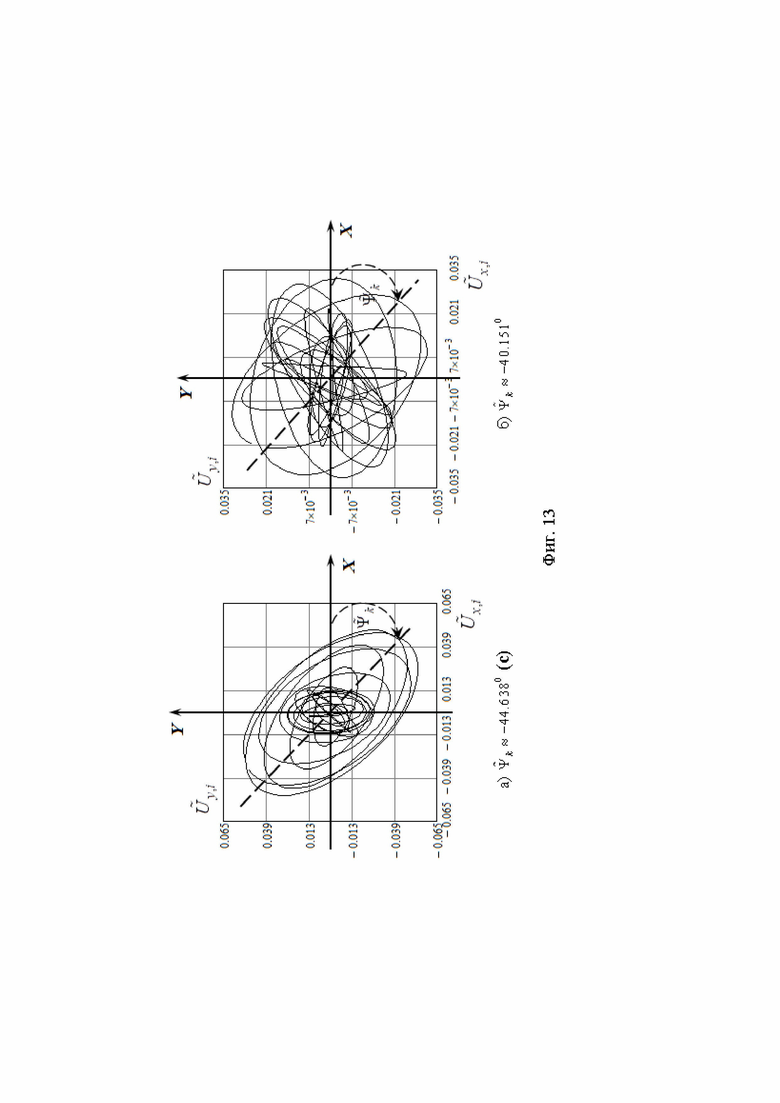
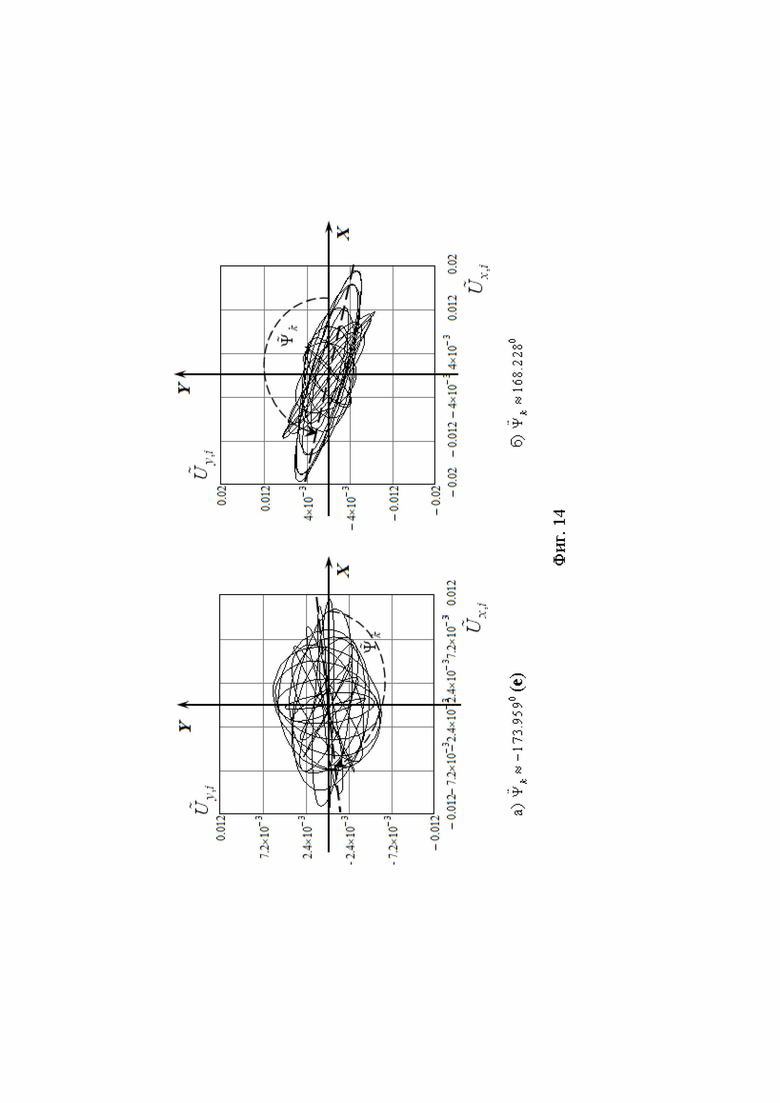
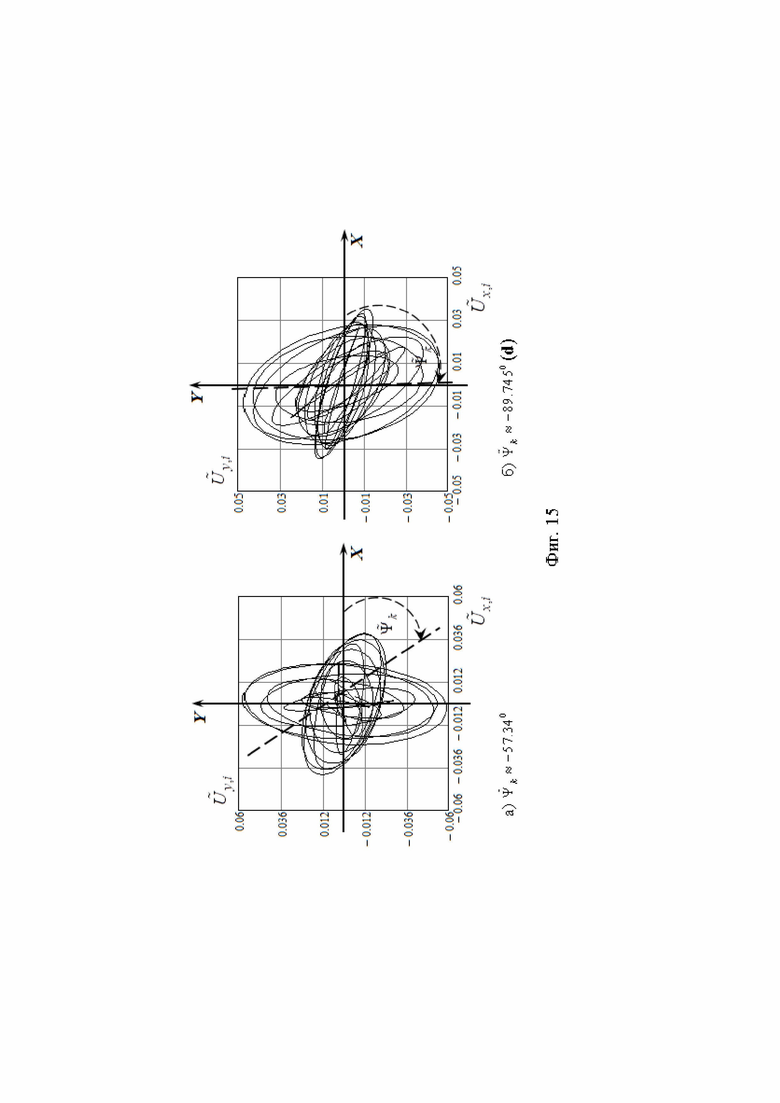
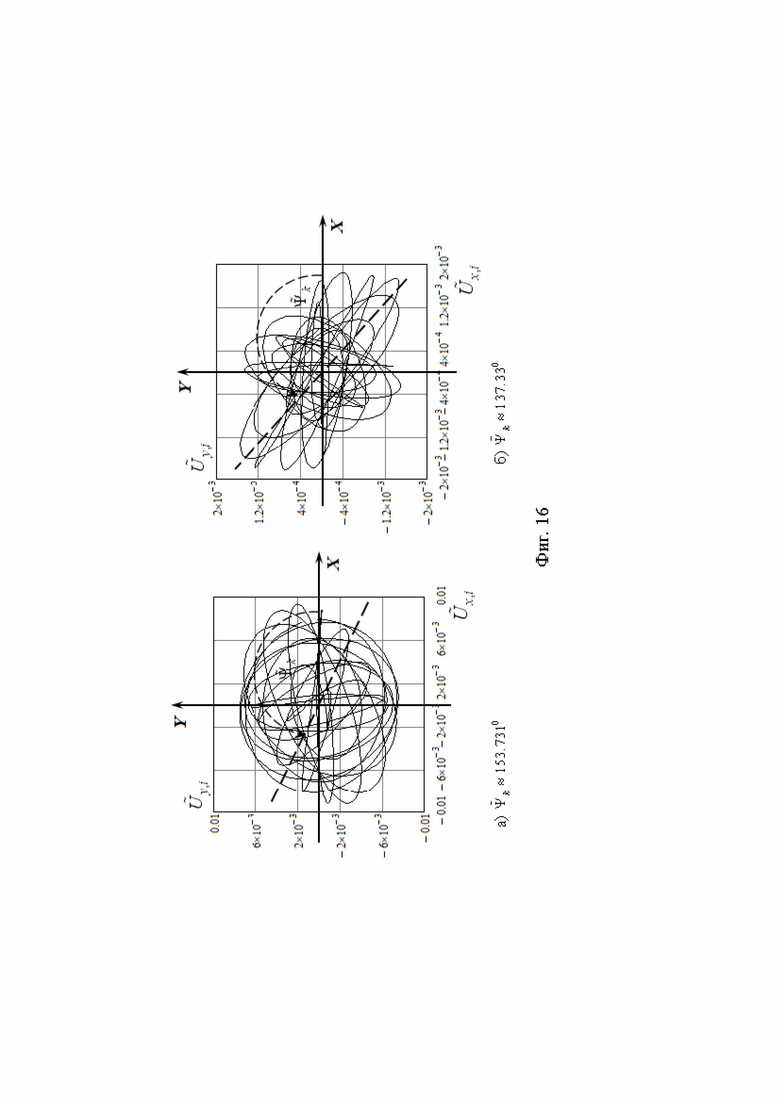
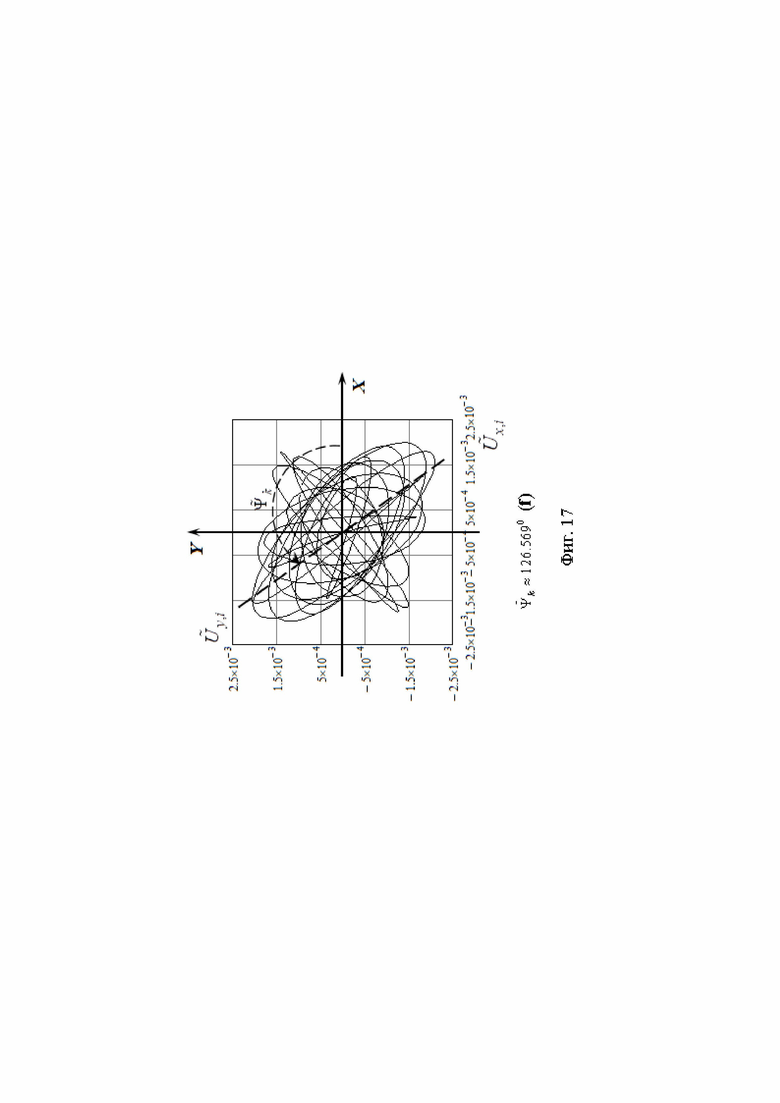
Изображение на фиг. 7 иллюстрирует поведение параметров текущих «эллипсов рассеяния» при рациональном выборе таких временных границ. Вертикальные прямые, изображённые жирным штрихом и отмеченные латинскими буквами, относятся к временным позициям, которые соответствуют координатам на карте местности, где находится КИТ. Эти и некоторые другие временные позиции отмечены на фиг. 7 чёрными жирными ромбиками.
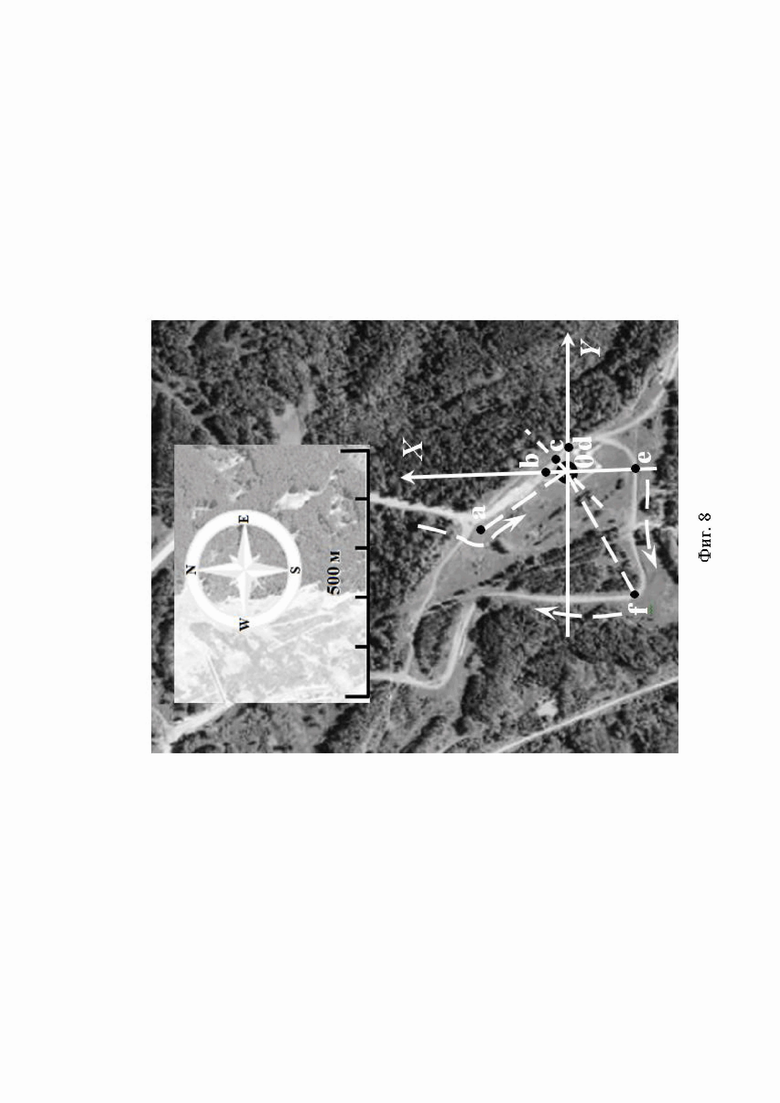
На фиг. 8 представлена карта участка местности, содержащего соответствующий данному временному диапазону отрезок КИТ с координатами местоположения заглубленного в грунт трёхкомпонентного геофона GS-3. Здесь белые стрелки, показанные жирным штрихом, означают направление движения объекта по КИТ. Чёрные жирные кружки отмечают некоторые характерные координаты, причём с каждым кружком связана определённая латинская буква. Буква а означает некоторую начальную координату, соответствующую моменту 495 с; b – координату, соответствующую первому пересечению объектом оси 0X; с – координату точки траверза; d - координату, соответствующую первому пересечению объектом оси 0Y; e - координату, соответствующую второму пересечению объектом оси 0X; f – некоторую конечную координату, соответствующую моменту 695 с. Прямые 0а и 0f, показанные жирным белым штрихом, определяют минимальные расстояния между геофоном и соответствующими координатами. Прямая 0с, также показанная жирным белым штрихом, определяет траверзное расстояние. Таким образом, анализ фиг. 8 показывает, что точки а и f «отсекают» ближайший к геофону отрезок КИТ, который определяется временным диапазоном, в котором оценки параметров «эллипсов рассеяния» можно считать достаточно достоверными. Кроме того, из этого анализа следуют важные выводы: с северо-восточной стороны отрезка КИТ, представленного на карте и обращённого к геофону, находится достаточно густой лесной массив с рослыми деревьями, следовательно, с мощной и глубокой корневой структурой, которая эффективно рассеивает распространяющиеся сейсмические колебания. Вокруг средней части этого отрезка КИТ по направлению восток-запад растительности нет. Остальная часть данного отрезка КИТ ведёт на север и также покрыта достаточно густой и высокой растительностью. Так как на этом участке КИТ сейсмосигнал поступает на входы трёхкомпонентного геофона, практически минуя мощную корневую структуру, то очевидно, что этим фактором и определились границы участка КИТ а - f.
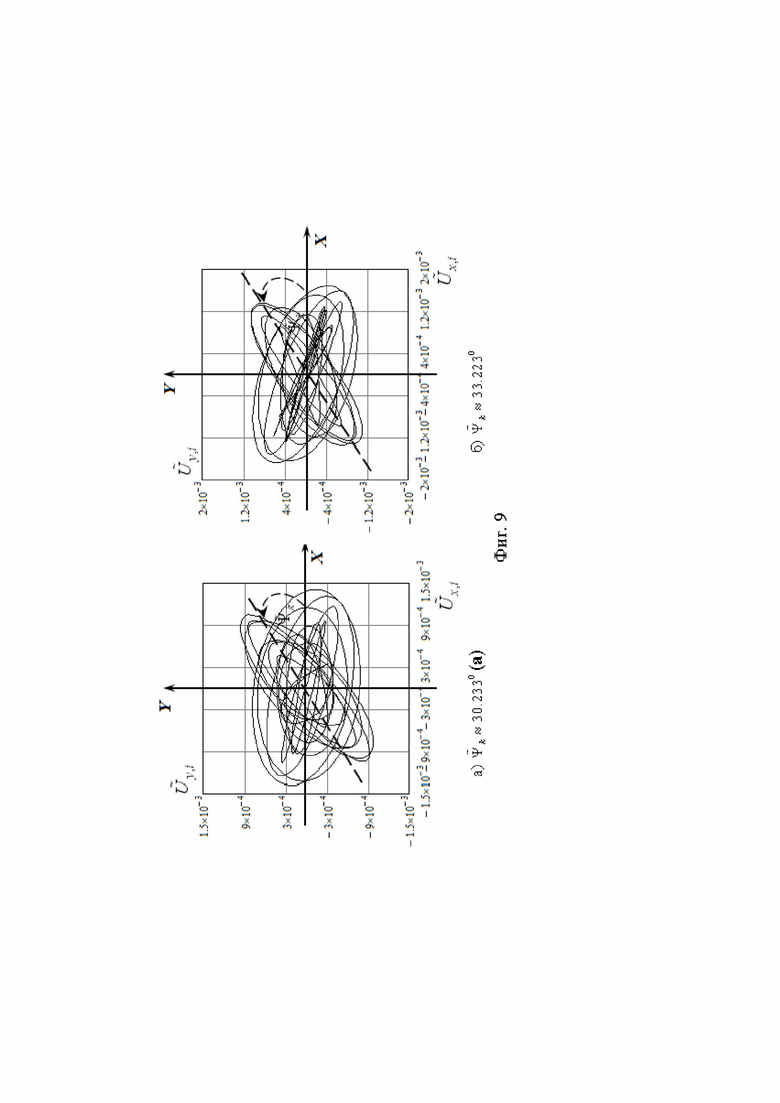
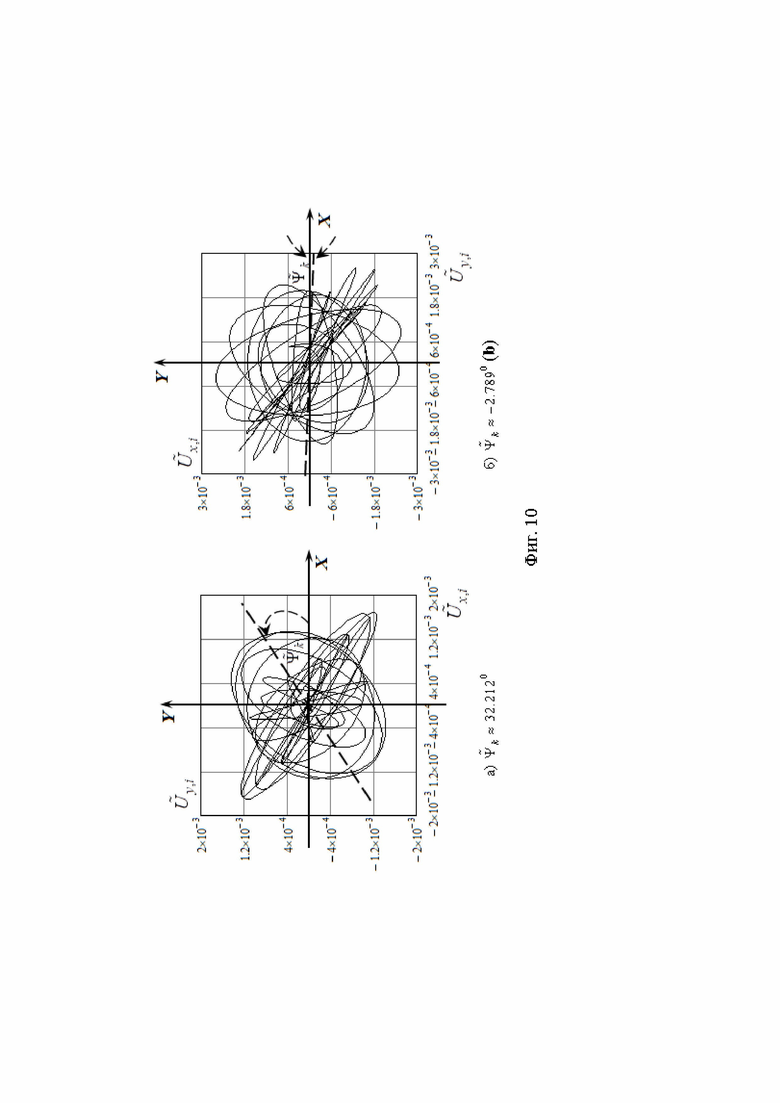
На фиг. 9 – фиг. 17 представлены построенные на секундных интервалах «эллипсы рассеяния», соответствующие временным позициям, отмеченным на фиг. 7 чёрными жирными ромбиками: слева направо.
Используя фиг. 7 и фиг. 8, можно провести полный численный анализ предложенного способа. Для этого в соответствии с масштабом карты необходимо оценивать длины путей, проходимых подвижным объектом по КИТ между координатами, отмеченными латинскими буквами. Соответствующие этим путям азимутальные углы и временные отрезки необходимо оценивать по данным фиг. 7а).
1. Путь, пройденный от координаты а до координаты b, пересчитанный с использованием масштаба карты, примерно равен ΔSab ≈ 190 м. Время, затраченное на прохождение этого пути равно Δtab = 536 - 495 = 41 c. Азимутальный угол изменился на 
2. Путь, пройденный от координаты b до координаты с, пересчитанный с использованием масштаба карты, примерно равен ΔSbc ≈ 40 м. Время, затраченное на прохождение этого пути равно Δtbc = 605 - 536 = 69 c. Азимутальный угол изменился на 
3. Путь, пройденный от координаты c до координаты d, пересчитанный с использованием масштаба карты, примерно равен ΔScd ≈ 45 м. Время, затраченное на прохождение этого пути равно Δtcd = 631 - 605 = 26 c. Азимутальный угол изменился на 
4. Путь, пройденный от координаты d до координаты e, пересчитанный с использованием масштаба карты, примерно равен ΔSde ≈ 120 м. Время, затраченное на прохождение этого пути равно Δtde = 642 - 631 = 11 c. Азимутальный угол изменился на 
5. Путь, пройденный от координаты e до координаты f, пересчитанный с использованием масштаба карты, примерно равен ΔSef ≈ 220 м. Время, затраченное на прохождение этого пути равно Δtef = 695 - 642 = 53 c. Азимутальный угол изменился на 
6. Сумма всех приращений углов на пути от точки а до точки f составила

То есть объект за время движения от т. а до т. f совершил поворот против часовой стрелки на 254.660, что правильно отображено на карте местности.
7. Приблизительная длина пути, пройденного объект от т. а до т. g, составила

8. Средняя скорость прохождения объекта на пути Sag составит величину

Проведённый численный анализ показал, что заявленные качества предлагаемого способа пеленгования подвижных объектов наземной техники выполняются.
Достигаемый технический результат состоит в снижении аппаратной избыточности при создании устройства, реализующего предлагаемый способ и, как следствие – в снижении времени установки созданного устройства на местности, экономии энергоресурса и вычислительного ресурса при его функционировании.
Результат достигается за счет использования информации, связанной с описанием поляризационной структуры сейсмических сигналов.
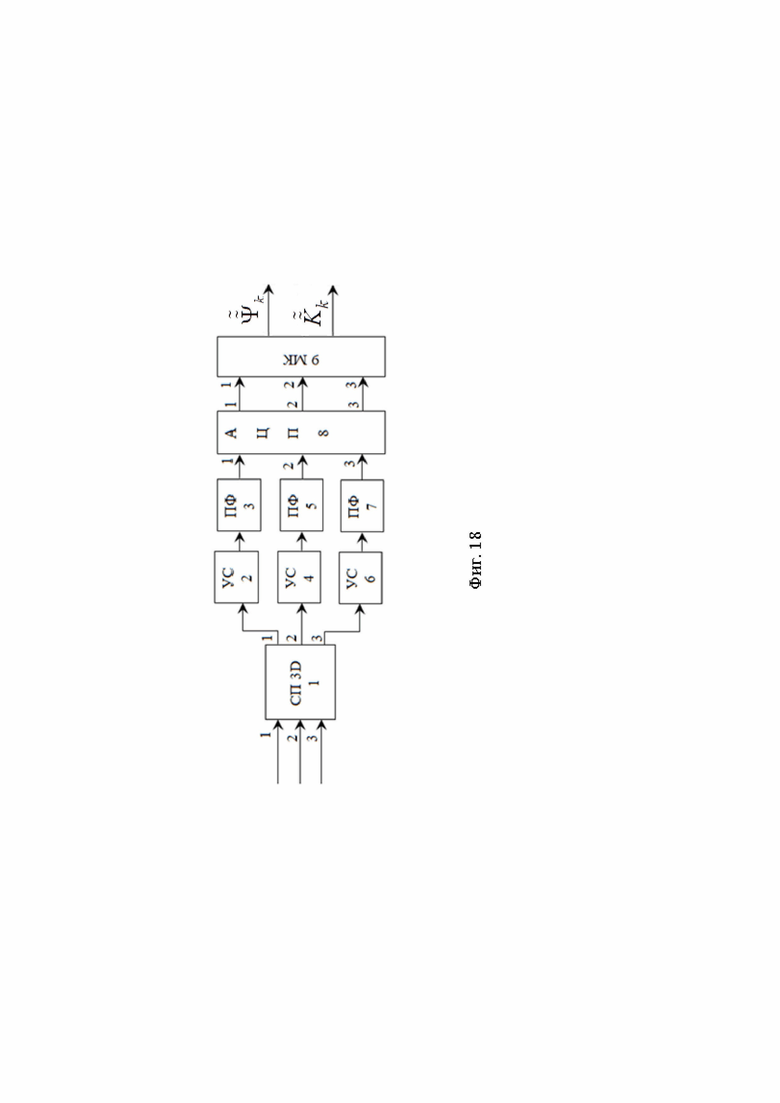
На фиг. 18 представлена укрупнённая блок-схема устройства, реализующего предлагаемый способ, где введены следующие обозначения:
1 – трёхкомпонентный сейсмоприёмник, три оси чувствительности которого взаимно ортогональны (СП 3D);
2, 4, 6 – первый, …, третий усилители сигнала (УС);
3, 5, 7 – первый, …, третий аналоговые полосовые фильтры (ПФ);
8 – аналого-цифровой преобразователь (АЦП);
9 – микроконтроллер (МК).
Устройство содержит трёхкомпонентный сейсмоприёмник 1, а также три линейки: последовательно соединенные первый усилитель 2 и первый ПФ 3, последовательно соединенные второй усилитель 4 и второй ПФ 5, последовательно соединенные третий усилитель 6 и третий ПФ 7. При этом выходы ПФ 3, ПФ 5 и ПФ 7 соединены с первым, вторым и третьим входами АЦП 8 соответственно. Три выхода АЦП 8 соединены с соответствующими входами микроконтроллера 9, два выхода которого являются выходами устройства. Причем в микроконтроллере МК 9 реализуются программно медианный и комплементарный фильтры. Кроме того, первый, второй и третий выходы трёхкомпонентного сейсмоприёмника 1 соединены с входами первого УС 2, второго УС 4 и третьего УС 6 соответственно. Первый, второй и третий входы трёхкомпонентного сейсмоприёмника 1 являются входами трех взаимно ортогональных компонент сейсмосигналов.
Работает устройство следующим образом.
На три входа трёхкомпонентного сейсмоприёмника 1 поступают три взаимно ортогональные компоненты сейсмосигнала, где они преобразуются в электрические сигналы. Эти электрические сигналы с трёх выходов трёхкомпонентного сейсмоприёмника 1 поступают на соответствующие входы усилителей сигналов 2, 4 и 6, где усиливаются до необходимой величины. С выходов этих усилителей сигналы поступают на соответствующие входы аналоговых полосовых фильтров 3, 5 и 7 с полосой пропускания каждый равной Δf = 150 Гц и граничными частотами fн = 0 Гц, fв = 150 Гц. Отфильтрованные сигналы с выходов полосовых фильтров 3, 5 и 7 поступают на три соответствующих входа аналого-цифрового преобразователя 9, где подвергаются дискретизации, и с трёх его выходов дискретизированные сигналы поступают на соответствующие входы микроконтроллера 9. В микроконтроллере осуществляется обработка дискретизированных компонент в соответствии с соотношениями (1) – (9). Результаты в виде значений текущих отсчётов азимутального угла и коэффициента эллиптичности с выходов микроконтроллера 9 поступают потребителю для дальнейшего использования.
Реализация данного устройства не вызывает затруднений, так как все блоки, кроме трёхкомпонентного сейсмоприёмника 1 являются достаточно часто используемыми в патентах и инженерных разработках. Линейные сейсмические сенсоры, на базе которых могут быть созданы трёхкомпонентные сейсмические датчики, достаточно хорошо известны, описаны в технической литературе, например, в [8], либо используются в соответствующих устройствах, например, в [9-12].
Трёхкомпонентный сейсмоприёмник 1 (геофон) состоит из трёх линейных геофонов, оси чувствительности которых взаимно ортогональны имеют единый фазовый центр; в патентах [2, 3, 11, 12] представлены именно линейные сейсмодатчики, из которых конструируются трёхкомпонентные).
Источники информации
1. Патент 2475779 (РФ). Способ распознавания сейсмического события и сейсмический детектор для его осуществления. МПК G01М 1/16, G08В 21/10. Баграташвили Н.В. Заявка № 2011123387/28 от 09.06.2011. Опубл. 20.02.2013 г. Бюл. № 5.
2. Патент 24422190 (РФ). Сейсмический пеленгатор объектов. МПК G01V 1/00, G01S 15/88. Иванов В. А., Дюгованец А. П., Скридлевский А. В. Заявка № 2010121784/28 от 28.05.2010. Опубл. 10.02.2012. Бюл. № 4.
3. Патент 2650703 (РФ). Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов. МПК G08B 13/16, G01V 1/16, G01S 15/88; СПК G08B 13/1663, G01V 1/16, G01S 15/88. Шевченко В. П., Шевченко Д. В., Пышкин Д. В., Иванов В. Э. Заявка № 2017100182 от 09.01.2017. Опубл. 17.04.2018. Бюл. № 11.
4. Корн, Г. Справочник по математике для научных работников и инженеров / Г. Корн, Т. Корн. – М.: Наука, 1984. – 832 с.
5. Баскаков, С.И. Радиотехнические цепи и сигналы/ С.И. Баскаков. – М.: Высшая школа, 1983. – 536 с.
6. Григорюк, А.П. Исследование поляризации сейсмических волн при вибросейсмическом мониторинге / А. П. Григорюк, В. В. Ковалевский, Л. П. Брагинская // Интерэкспо ГЕО-Сибирь. XIV Междунар. науч. конгр., 23–27 апреля 2018 г., Новосибирск: Междунар. науч. конф. «Дистанционные методы зондирования Земли и фотограмметрия, мониторинг окружающей среды, геоэкология»: сб. материалов в 2 т. Новосибирск: СГУГиТ, 2018. Т.2. С. 10-16.
7. Доброродный, В.И. Обнаружение и локация наземных подвижных объектов с использованием спектрально-поляризационного метода / В.И. Доброродный, О.А. Копылова, М.С. Хайретдинов, Д.В. Костин / Теория и техника радиосвязи, № 4, 2021. С. 48 – 57.
8. Сейсмические средства обнаружения. Теория и практика построения: монография / под. ред. И.Н. Крюкова. М.: Радиотехника, 2014. 216 с.: ил. Науч. серия «Территориально распределённые системы охраны».
9. Патент 2014619 (РФ). Датчик ускорения. МПК G01P 15/12. Колесникова Л.А., Полуянов В.А., Логинов П.М., Соболев М.Д. Заявка № 4955527/10 от 13.06.1991. Опубл. 15.06.1994 г.
10. Янчич В.В. Пьезоэлектрические акселерометры на основе монолитного блока с деформацией изгиба / В.В. Янчич // Зарубежная радиоэлектроника. – 1996. – № 9, стр. 63-64.
11. Патент 2204850 (РФ). Сейсмоприемник. МПК G01V 1/16. Доля В.К., Круглов А.К. Заявка № 2002112574/28 от 13.05.2002. Опубл. 20.05.2003 г.
12. Патент 2703481 (РФ). Датчик для регистрации сейсмических колебаний. МПК G01V 1/16, G01V 1/18, G01V 1/20, H03B 9/12, СПК G01V 1/162, G01V 1/181, G01V 1/20. Заалишвили В.Б., Козырев Е.Н., Мельков Д.А., Аскеров Р.О. Заявка № 2019107234 от 13.03.2019. Опубл. 17.10.2019 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СЖАТИЯ СЕЙСМИЧЕСКОГО СИГНАЛА В СКВАЖИНЕ | 2012 |
|
RU2570699C2 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ГЕОАКУСТИЧЕСКОГО ИЗЛУЧЕНИЯ В ЗВУКОВОМ ДИАПАЗОНЕ ЧАСТОТ | 2013 |
|
RU2559516C2 |
Изобретение относится к области сейсмической разведки и может быть использовано в охранно- и разведывательно-сигнализационных комплексах и системах для определения направления перемещения подвижных объектов наземной техники из одной точки с использованием обработки сейсмических колебаний, возбуждаемых этими объектами в поверхностном слое почвы и регистрируемых трёхкомпонентным сейсмическим датчиком. Предложен способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком, включающий цифровую фильтрацию в частотной области отсчётов дискретизированных взаимно ортогональных компонент сейсмосигнала, поступивших на входы аналого-цифрового преобразователя с соответствующих выходов датчика. Причем осуществляют восстановление отфильтрованных компонент во временной области, формирование на их основе элементов матрицы ковариации, которая используется для нахождения её собственных векторов и собственных значений, текущие отсчёты которых сглаживаются. Также сглаживают текущие отсчёты x- и y-компонент первого собственного вектора и трёх собственных значений матрицы ковариации. Оценивают с использованием сглаженных текущих отсчётов x- и y-компонент первого собственного вектора текущие значения азимутального угла подвижного наземного объекта относительно оси 0Х декартовой системы координат, а также оценивают с использованием сглаженных отсчётов трёх собственных значений величины текущих отсчётов коэффициента эллиптичности «эллипса рассеяния». Осуществляют дополнительную фильтрацию полученных текущих отсчётов азимутального угла и коэффициента эллиптичности. Технический результат: снижение аппаратной избыточности при создании устройства, реализующего предлагаемый способ; снижение времени установки созданного устройства на местности, экономия энергоресурса и вычислительного ресурса при его функционировании. 18 ил.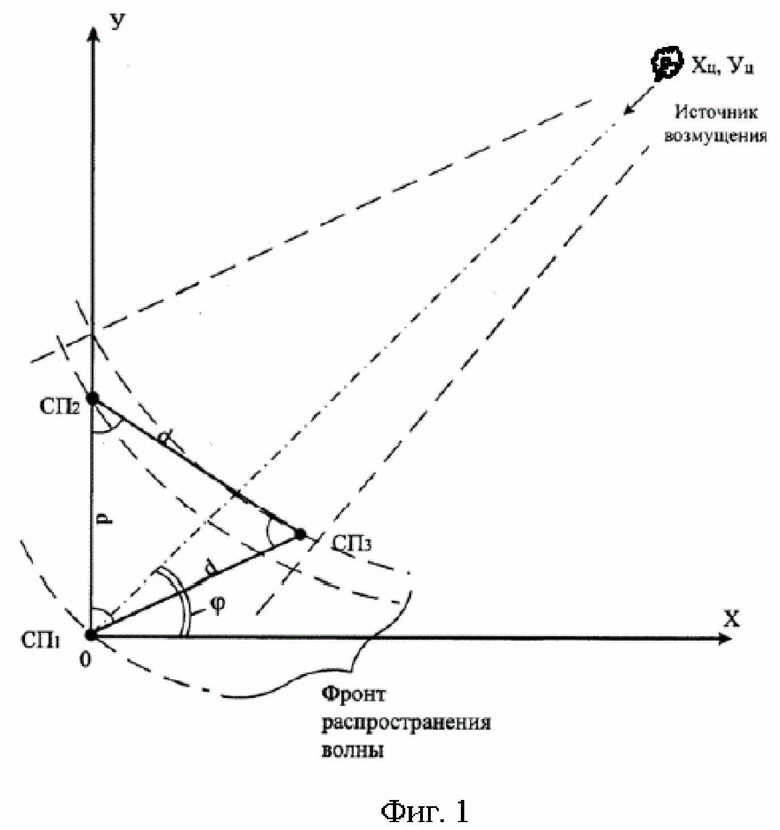
Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком, включающий цифровую фильтрацию в частотной области отсчётов дискретизированных взаимно ортогональных компонент сейсмосигнала, поступивших на входы аналого-цифрового преобразователя с соответствующих выходов датчика, отличающийся тем, что осуществляется восстановление отфильтрованных компонент во временной области, формирование на их основе элементов матрицы ковариации, которая используется для нахождения её собственных векторов и собственных значений, текущие отсчёты которых сглаживаются, сглаживание текущих отсчётов x- и y-компонент первого собственного вектора и трёх собственных значений матрицы ковариации, оценка с использованием сглаженных текущих отсчётов x- и y-компонент первого собственного вектора текущих значений азимутального угла подвижного наземного объекта относительно оси 0Х декартовой системы координат, оценка с использованием сглаженных отсчётов трёх собственных значений величины текущих отсчётов коэффициента эллиптичности «эллипса рассеяния», дополнительная фильтрация полученных текущих отсчётов азимутального угла и коэффициента эллиптичности.
| Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов | 2017 |
|
RU2650703C1 |
| СЕЙСМИЧЕСКИЙ ЛОКАТОР НАЗЕМНЫХ ОБЪЕКТОВ | 2013 |
|
RU2536087C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2014 |
|
RU2568142C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СЕЙСМИЧЕСКОГО СОБЫТИЯ И СЕЙСМИЧЕСКИЙ ДЕТЕКТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475779C1 |
| JP 0010282245 A, 23.10.1998 | |||
| KR 20210043448 A, 21.04.2021. | |||
