Группа изобретений относится к способам и устройствам для удаления закупоривающих материалов в периферических и коронарных сосудах, в том числе для дезоблитерации сосудистого просвета атеросклеротическими бляшками, а также при тромбозах, стенозах и т.д.
Известен атероэктомический катетер, содержащий гибкую полую трубку с закрепленной на ее рабочем конце режущей головкой, корпус с боковым пазом и полостью для размещения режущего элемента, соединенного с гибким валом, узел поперечного смещения режущей головки в сосуде со средством управления им и проводник, причем катетер снабжен блоком привода гибкого вала, содержащим размещенные в полой рукоятке источник питания и двигатель, механически связанный с валом, а также снабжен вакуумным насосом, соединенным с трубкой, проводник установлен в просвете трубки катетера с возможностью изъятия (см. патент RU №2068239, Кл. A61B 17/32, оп. в 1996 г.). Это оборудование относится к техническим средствам для атероэктомии с фиксацией корпуса режущей головки к стенкам сосуда в зоне удаления закупоривающего материала. Однако безопасность данного прибора недостаточна, т.к. асимметричная фиксация корпуса головки приведет к усилению давления на небольшую зону стенки сосуда, что может привести к ее травмированию и даже разрыву.
Известен расширяемый внутрипросветный стент со сдвижными и фиксирующими радиальными элементами, содержащий трубочный элемент, окружность и диаметр которого может изменяться, ряд сдвижных и фиксирующих радиальных элементов, сочленяющий механизм, который позволяет осуществлять одностороннее сдвигание радиальных элементов от первого сжатого диаметра до второго расширенного диаметра, но не допускает радиальную отдачу от второго расширенного диаметра (см. патент на изобретение RU №2294716, A61F 2/82, оп. в 2004 г.). Этот стент имеет оригинальную конструкцию, относится к расширяемым медицинским имплантатам, но не предназначен для удаления закупоривающего материала.
Известны устройство закупоривания, вводимое в кровеносный сосуд, содержащее два полых, выполненных с возможностью расширения органа, предназначенных для его фиксации путем опоры на два участка стенки кровеносного сосуда, аппарат для размещения устройства закупоривания кровеносного сосуда и способ использования устройства закупоривания кровеносного сосуда, имплантируемого в кровеносный сосуд пациента, включающий следующие операции: вводят аппарат в часть кровеносного сосуда; освобождают первый, выполненный с возможностью расширения, орган путем сдвига наружной оболочки по отношению к внутренней оболочке; фиксируют в определенном положении первый, выполненный с возможностью расширения, орган, поворачивают второй, выполненный с возможностью расширения, орган относительно первого органа для скручивания промежуточной части; фиксируют второй, выполненный с возможностью расширения, орган в повернутом положении, отрегулированном в соответствии с требуемой степенью закупоривания данного кровеносного сосуда, освобождают второй, выполненный с возможностью расширения, орган путем удаления внутренней оболочки при удержании поршня в положении упора, извлекают аппарат (см. патент на изобретение RU №2262898, A61B 17/12, оп. в 2004 г.). Эти технические решения предназначены для временной или для длительной полной или частичной закупорки сосудов при различных показаниях. Закупорка и фиксация устройства обеспечивается двумя расширительными органами, расположенными на концах устройства. Однако в этом изобретении не решен вопрос удаления закупоривающего материала.
Известно устройство эмболической защиты, включающее корпус со складными распорками, на которых установлен складывающийся улавливающий фильтр для задерживания сгустков из проходящей через сосуд крови (см. WO 2005027779, A61F 2/0, оп. в 2005 году, а также WO 03003927, A61B 17/00, оп. в 2003 году). Такой фильтр дает возможность очищать проходящую через него кровь от сгустков, превышающих размеры компонентов крови, однако не может кардинально решить вопрос удаления закупоривающего материала.
Известен катетер для всасывания, фрагментации и извлечения удаляемого материала из полостей, в частности тромбов и эмболии из кровеносных сосудов, с установленной на дистальном конце катетера рабочей головкой, перемещаемой аксиально посредством корпуса с прорезью, катетер имеет подвижный гибкий червячный винт, приводимый в действие удаленным от рабочей головки приводным механизмом, червячный винт имеет транспортировочную поверхность, которая спиралеобразно протянута вдоль своей продольной оси, а также окружающий червячный винт гибкий шланг, соединенный с рабочей головкой, предназначенный для отвода материала и отделенных тромбов и фрагментов эмболии, а также режущий инструмент, причем червячный винт в зоне рабочей головки вместе с отверстием образует действующий режущий инструмент, который в режиме работы непрерывно измельчает проникающие или всасываемые и/или отделившиеся тромбы и эмболии между периферийными краями червячного винта и краями отверстия и отводит материал вдоль транспортировочной поверхности в направление проксимального конца аппарат (см. патент на изобретение RU №2369345, A61B 17/22, оп. в 2008 г.). В этом катетере исключены травмы стенок сосудов режущим инструментом, однако эффективность катетера по удалению закупоривающего материала невелика, т.к. не обеспечивает полное очищение стенок сосудов, что зачастую приводит к рецидивам заболевания. Кроме того, данное устройство не обеспечивает, при необходимости, полную изоляцию очищаемой зоны сосуда.
Известно устройство для атероэктомии с вращательно-поступательным движением режущего инструмента, выполненного в виде складного зонтика (см. №ЕР 2303151, A61B 17/32, оп. в 2011 году). Оригинальное выполнение складного режущего инструмента позволяет устройству проникать в небольшие сосуды, однако это техническое решение имеет высокую травмоопасность из-за незащищенности режущего устройства, контактирующего непосредственно со стенками сосудов.
Известно устройство для атероэктомии с боковой прорезью и червячным винтом, корпус которого имеет переднюю режущую головку, частично закрытую сдвижным патроном во время транспортировки к зоне поражения (см. патент США №US 2011152907, A61B 17/22, оп. в 2011 году). Данное устройство, не оснащенное средствами фиксации в зоне обработки сосуда, так же, как и предыдущее, не обеспечивает полной очистки стенок сосуда от закупоривающего материала, а незащищенная вращающаяся головка в момент обработки может привести к травмам стенок сосуда.
Известно устройство для атероэктомии, катетер которого оснащен режущим инструментом и видеокамерой (см. патент США №US 2010298850, A61D 1/02, оп. в 2010 году, а также патент США №US 2010280534, A61B 1/00, оп. в 2010 году). Такое выполнение устройства позволяет контролировать процесс проникновения катетера в сосуд и обработки зоны его закупорки, однако оно не может обеспечить полную безопасность операции из-за открытой поверхности головки режущего устройства.
Известны устройства для атероэктомии или тромбэктомии, включающие корпус режущего инструмента с элементами стабилизации его положения, одно из которых стабилизируется в дистальной и проксимальной зонах относительно места закупорки сосуда, а другое - в проксимальной зоне, причем головки режущих инструментов этих устройств закрыты крышкой в торцевой зоне, обеспечивающей безопасность движения катетера в сосуде до фиксации (стабилизации положения) корпуса, и во втором случае головка режущего инструмента выполнена поворотной относительно корпуса катетера (см. патент США №US 2010094320, A61B 17/22, оп. в 2010 г.). Известные технические решения обеспечивают закрепление катетера в зоне обработки закупоривающего материала, уменьшая травмоопасность процедуры атероэктомии, однако боковая подвижность стабилизирующих элементов, позволяющая незащищенной сбоку режущей головке максимально сдвигаться к стенке сосуда, может привести к его повреждению.
Наиболее близким техническим решением к заявленной группе изобретений являются эндовазальный мини-робот, включающий средство перемещения, представляющее собой движитель, выполненный в виде раздельных транспортных модулей, каждый из которых установлен с возможностью соединения с другими модулями и разъема, измерительный модуль, на котором размещены средства контроля с видеодатчиком, тактильными датчиками, датчиком положения мини-робота внутри трубчатого органа; воздействующий модуль, на котором установлены средства воздействия в виде вращающегося режущего инструмента с возможностью изменения его диаметра, приводимого в движение за счет гидропривода, с валом в виде гибкого стрежня; а транспортные модули представляют собой тонкостенные конструкции, содержащие оболочечные и упругие деформируемые элементы, и способ удаления закупоривающего материала, реализованный в этом техническом решении (см. патент на изобретение RU №2218191, A61M 29/00, оп. в 2002 г.). Это усовершенствованное техническое решение предназначено для диагностики и лечения заболеваний сосудов, в том числе и для удаления сосудистых отложений. Однако режущий инструмент, применяемый в данном устройстве, не отвечает требованиям безопасности, поскольку имеет открытую режущую головку, что может привести к травмированию стенок сосудов. Кроме того, в патенте недостаточно проработан вопрос фиксации режущего инструмента в месте образования закупорки сосуда.
Настоящее изобретение направлено на решение технической задачи повышения эффективности способа удаления закупоривающего материала из сосудов и повышения надежности работы используемых для этого устройств при высокой точности продвижения атероэктомической микромашинки в сосудах и уменьшении степени травматичности стенок сосудов за счет использования системы многоуровневой фиксации обрабатывающей головки в сочетании с компьютерным отслеживанием процесса на увеличенных размерах зоны обработки.
Решение поставленной технической задачи достигается тем, что в способе удаления закупоривающего материала, включающем транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сосуде, позиционирование и фиксацию атероэктомической микромашинки, разрушение закупоривающего материала и выведение продуктов обработки из сосуда, фиксацию атероэктомической машинки производят в ее дистальной и проксимальной областях с последующей фиксаций обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, при этом разрушение закупоривающего материала производят посекторно посредством одновременной поступательной продольной обработки маятниковыми фрезами, качающимися вокруг продольной оси. Сбор продуктов обработки осуществляют в нижней зоне сосуда, а их выведение производят посредством аспирационного устройства. После фиксации атероэктомической микромашинки осуществляют герметизацию зоны обработки закупоривающего материала, удаляют из зоны обработки кровь и подают в эту зону ее искусственный прозрачный аналог.
А также тем, что в другом варианте способа удаления закупоривающего материала, включающем транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сосуде, позиционирование и фиксацию атероэктомической микромашинки, разрушение закупоривающего материала и выведение продуктов обработки из сосуда, фиксацию атероэктомической машинки производят в ее дистальной и проксимальной областях с последующей фиксаций обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, при этом производят плавное щадящее расширение просвета сосуда путем послойного кругового снятия закупоривающего материла от центра сосуда к его периферии. Сбор и выведение продуктов обработки производят непосредственно в зоне обработки закупоривающего материала. После фиксации атероэктомической микромашинки осуществляют герметизацию зоны обработки закупоривающего материала, удаляют из зоны обработки кровь и подают в эту зону ее искусственный прозрачный аналог.
В следующем варианте способа удаления закупоривающего материала, включающем транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сосуде, позиционирование и фиксацию атероэктомической микромашинки, разрушение закупоривающего материала и выведение продуктов обработки из сосуда, фиксацию атероэктомической машинки производят в ее дистальной и проксимальной областях с последующей фиксаций обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, при этом производят послойное торцевое скоростное круговое фрезерование закупоривающего материала посредством сложения двух круговых составляющих, включающих вращение лезвийного инструмента вокруг своей оси и вращение обрабатывающей головки вокруг продольной оси микромашинки. Сбор и выведение продуктов обработки осуществляют посредством вращающегося патрубка аспирационного устройства. После фиксации атероэктомической микромашинки осуществляют герметизацию зоны обработки закупоривающего материала, удаляют из зоны обработки кровь и подают в эту зону ее искусственный прозрачный аналог.
И в следующем варианте способа удаления закупоривающего материала, включающем транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сонной артерии, позиционирование и фиксацию атероэктомической микромашинки, разрушение закупоривающего материала и выведение продуктов обработки из сонной артерии, фиксацию атероэктомической машинки производят консольно в ее проксимальной области, затем продвигают сложенные фиксаторы через зону разветвления сонной артерии и их фиксируют в ее ветвях, причем осуществляют дополнительную фиксацию обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, при этом разрушение закупоривающего материала производят червячным принципом путем последовательно вырезания в нем продольных канавок.
А также тем, что атероэктомическая микромашинка, включающая средство перемещения, средство контроля, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, снабжена дистально и проксимально расположенными на ней средствами герметизации, а средство фиксации выполнено в виде зонтичных фиксаторов, расположенных в дистальной и проксимальной зонах микромашинки, а средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки, корпус которой установлен с возможностью маятникового движения вокруг продольной оси микромашинки и поступательного перемещения относительно этой оси, причем обрабатывающая головка снабжена фрезерным механизмом, выполненным в виде полузакрытых защитными кожухами высокоскоростных фрез, расположенных под острым углом к продольной оси микромашинки, при этом обрабатывающая головка снабжена средством дополнительной фиксации, выполненным в виде шарнирно установленных в зоне непосредственной обработки закупоривающего материала складывающихся опорных лап. Средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено патрубком отбора, расположенным в нижней зоне обрабатывающей головки. Высокоскоростные фрезы обрабатывающей головки выполнены многозаходными в виде лезвийных инструментов, состоящих из фрагментов спирали с острыми режущими кромками со скруглением в торцевой зоне. Складывающиеся опорные лапы снабжены параллелограммным механизмом раскрытия и тягой, связанной с приводом раскрытия. Высокоскоростные фрезы обрабатывающей головки снабжены двигателями, расположенными с фрезами в общем корпусе, связанными в средней зоне поворотными тягами с корпусом обрабатывающей головки и шарнирно закрепленными на корпусе обрабатывающей головки в задней зоне. Средство герметизации выполнено в виде надувных баллонов.
В другом варианте исполнения атероэктомическая микромашинка, включающая средство перемещения, средство контроля, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, снабжена дистально и проксимально расположенными на ней средствами герметизации, а средство фиксации выполнено в виде зонтичных фиксаторов, расположенных в дистальной и проксимальной зонах микромашинки, а средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки, установленной с возможностью вращения вокруг продольной оси микромашинки и поступательного перемещения относительно этой оси и включающей продольно расположенное бритвенное устройство шнекового типа, включающее корпус с сетчатым окном, развернутым в рабочем положении в сторону стенки сосуда, при этом обрабатывающая головка снабжена средством дополнительной фиксации, выполненным в виде шарнирно установленных в зоне непосредственной обработки закупоривающего материала складывающихся опорных лап. Средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено патрубком отбора, расположенным в задней торцевой зоне бритвенного устройства шнекового типа. Бритвенное устройство шнекового типа снабжено однозаходным шнеком. Складывающиеся опорные лапы снабжены параллелограммным механизмом раскрытия и тягой, связанной с приводом раскрытия. Корпус снабжен параллелограммным механизмом раскрытия. Средство герметизации выполнено в виде надувных баллонов.
В следующем варианте исполнения атероэктомическая микромашинка, включающая средство перемещения, средство контроля, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, снабжена дистально и проксимально расположенными на ней средствами герметизации, а средство фиксации выполнено в виде зонтичных фиксаторов, расположенных в дистальной и проксимальной зонах микромашинки, а средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки, корпус которой установлен с возможностью вращательного движения вокруг продольной оси микромашинки и поступательного перемещения относительно этой оси, причем обрабатывающая головка снабжена поворотным высокоскоростным лезвийным инструментом, расположенным под острым углом к продольной оси микромашинки в кожухе с открытым в сторону расположения закупоривающего материала окном и выполненным в виде продольно развернутых фрагментов спирали с острием, направленным под углом к фронтальной плоскости, при этом обрабатывающая головка снабжена средством дополнительной фиксации, выполненным в виде шарнирно установленных в зоне непосредственной обработки закупоривающего материала складывающихся опорных лап, при этом средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено поворотным патрубком отбора, расположенным диаметрально относительно лезвийного инструмента. Складывающиеся опорные лапы снабжены параллелограммным механизмом раскрытия и тягой, связанной с приводом раскрытия. Средство герметизации выполнено в виде надувных баллонов.
А в атероэктомической микромашинке, включающей средство перемещения, средство контроля, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, средство фиксации снабжено элементами установки в зоне разветвления сонной артерии, выполненными в виде двух поплавкововидных складных фиксатора, снабженных микросетками в дистальной зоне и закрепленных на передних концах выдвижных полых стержней, и двойным зонтичным фиксатором, расположенным в задней зоне микромашинки, причем средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки фронтального типа с корпусом, установленным с возможностью возвратно-поступательного движения относительно продольной оси микромашинки и с возможностью пошагового поворота относительно этой оси, при этом обрабатывающая головка выполнена в виде двух шнеков, диаметрально расположенных в корпусах с торцевыми окнами, снабженными неподвижно закрепленными в них секторными ножами и заборными лопатками, расположенными над торцевыми окнами в передней зоне корпуса со стороны прилегания к стенкам артерии в раскрытом положении. Шнеки обрабатывающей головки выполнены четырехзаходными с острыми кромками во входной зоне. Корпуса шнеков обрабатывающей головки снабжены параллелограммным механизмом складывания, связанным с корпусом обрабатывающей головки. Средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено патрубками отбора, расположенными в задней торцевой зоне корпусов шнеков обрабатывающей головки.
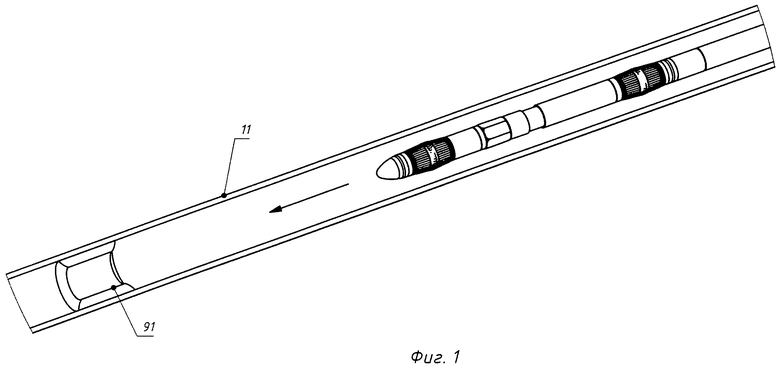
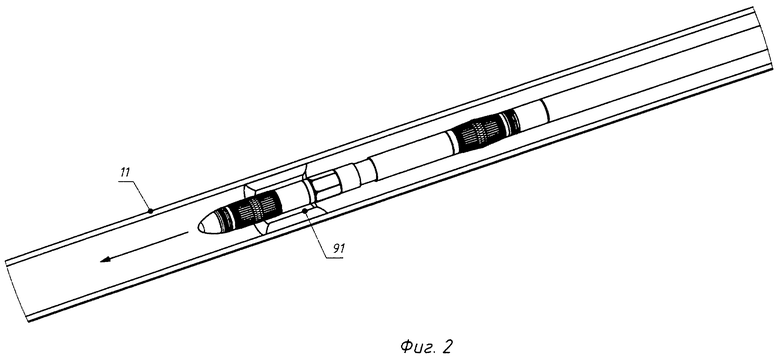
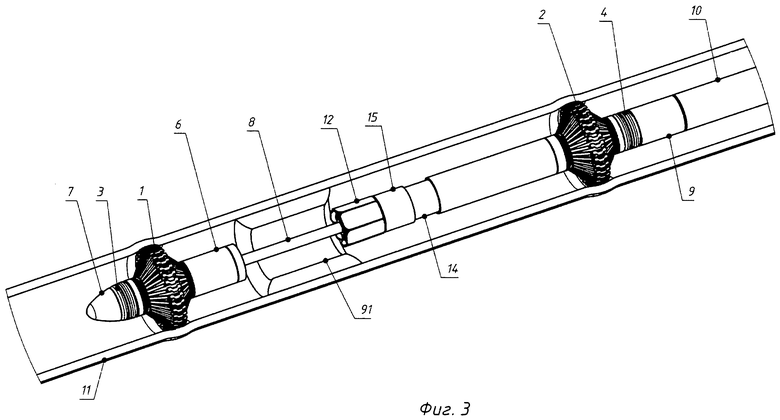
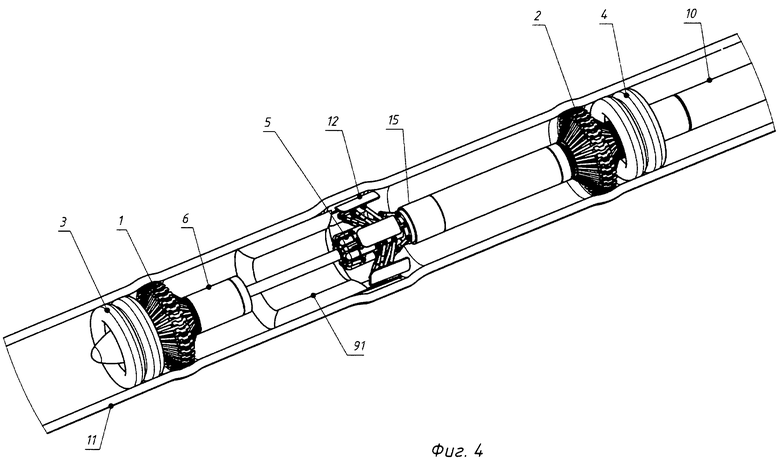
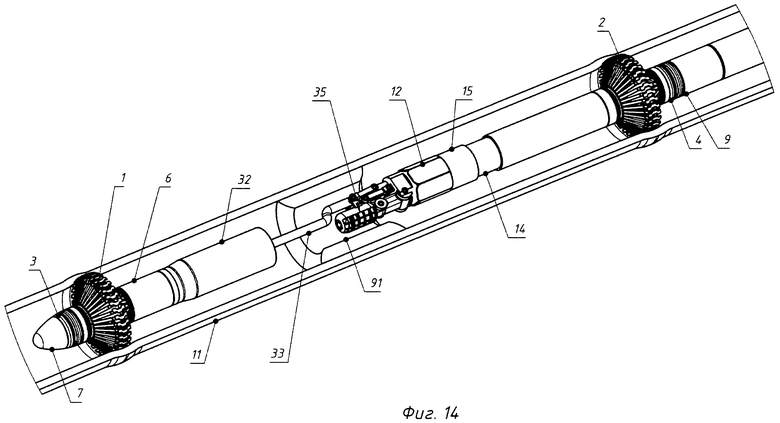
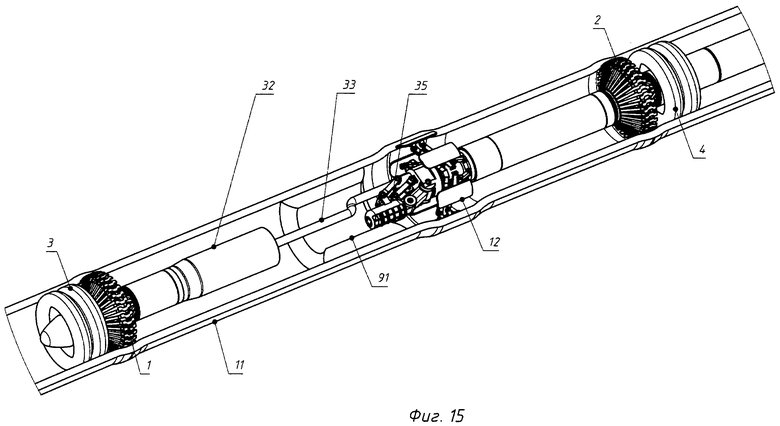
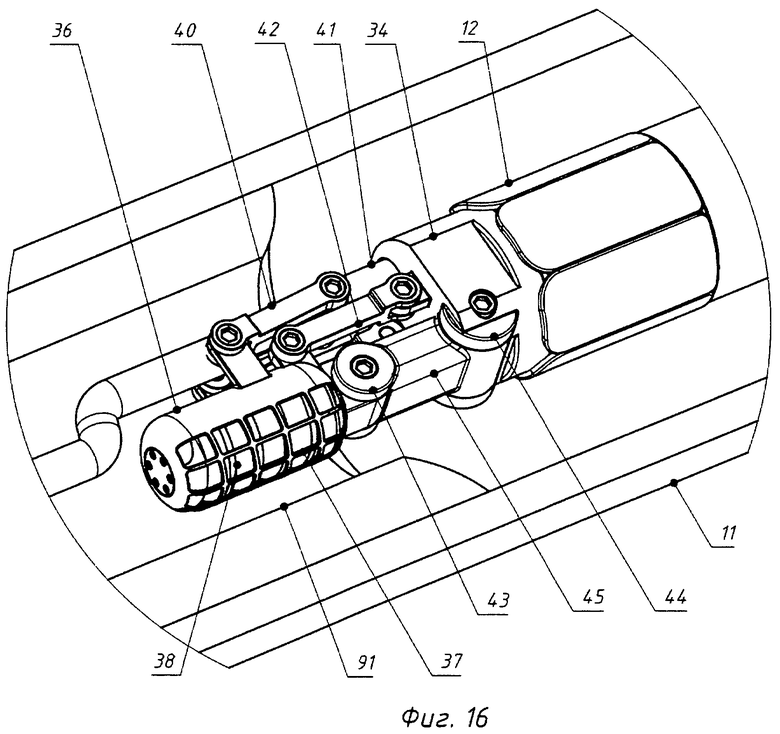
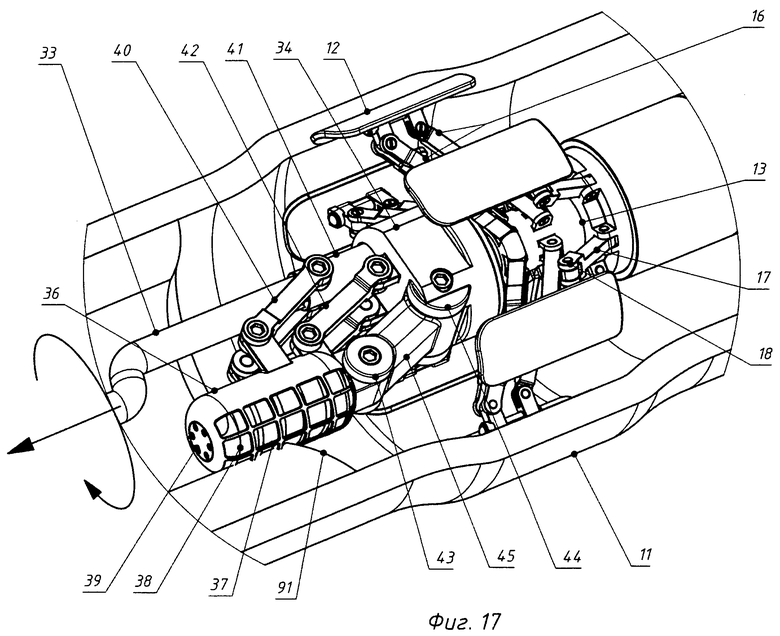
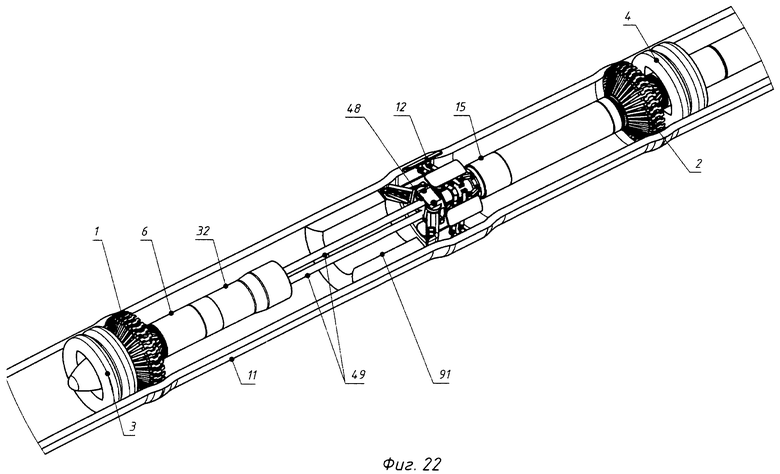
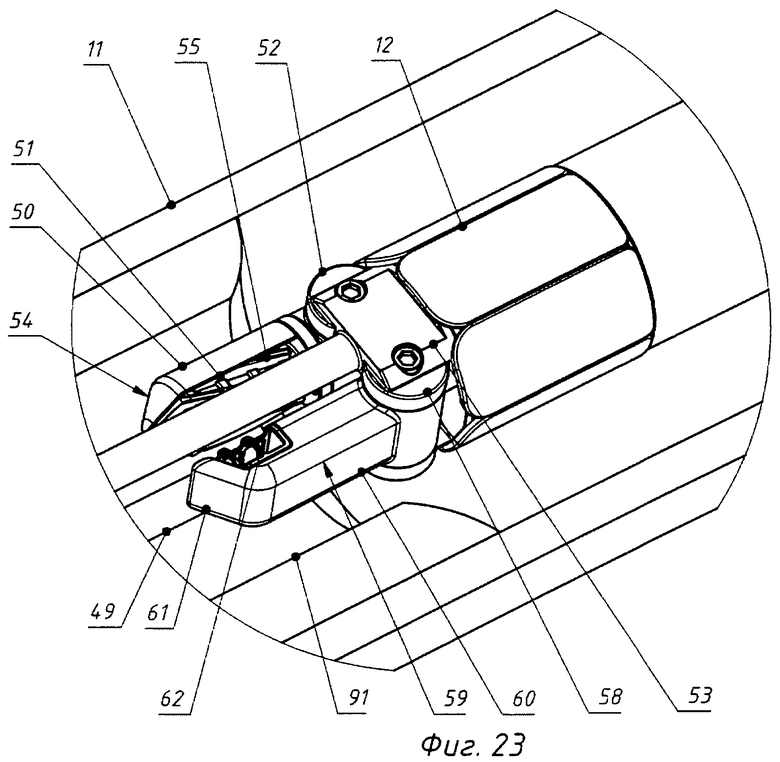
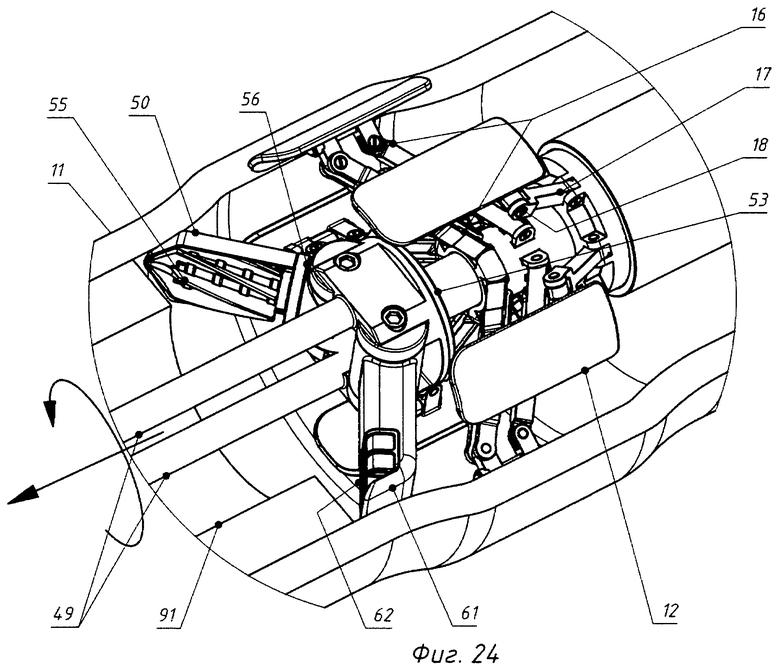
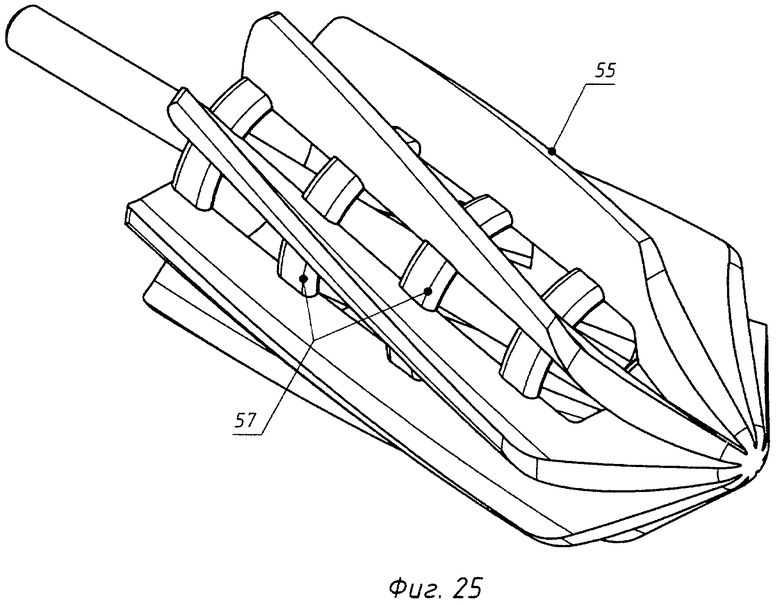
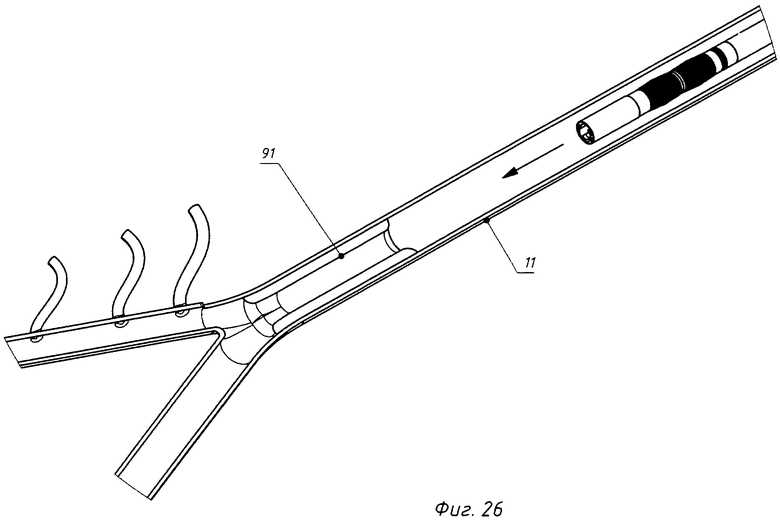
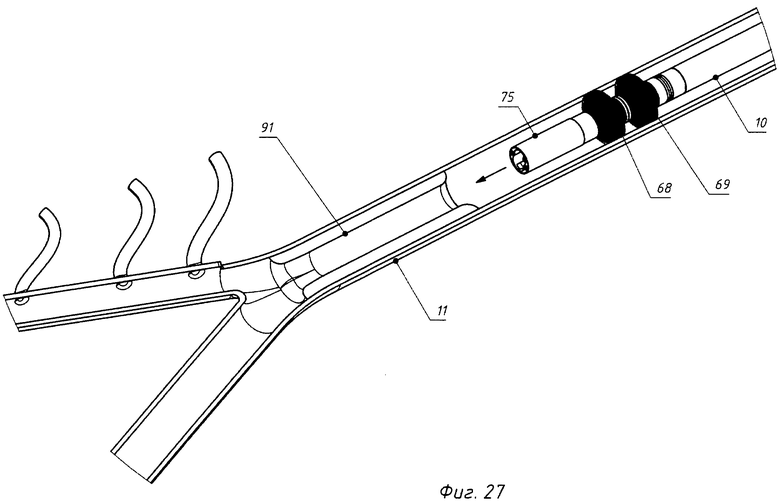
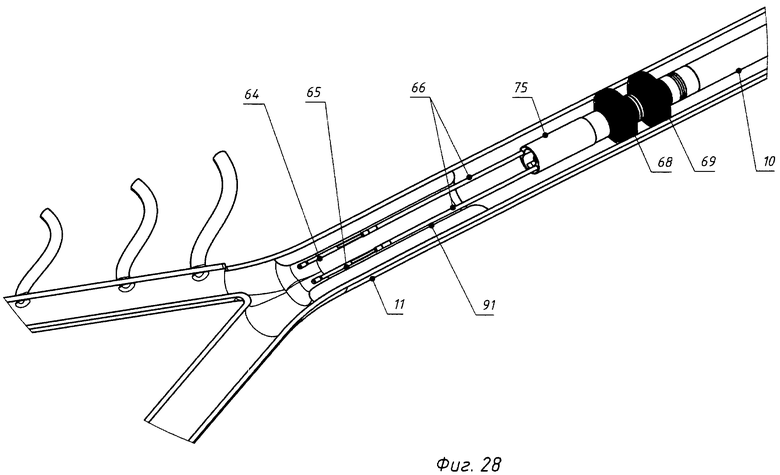
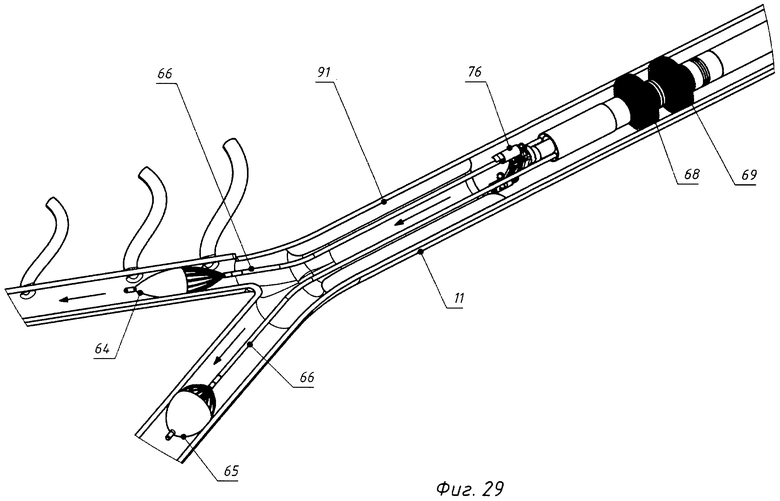
Изобретение поясняется чертежами. На фиг.1 схематично изображена атероэктомическая микромашинка с фрезерной обрабатывающей головкой колебательного типа во время движения к месту закупорки сосуда, в изометрии, сосуд в сечении. На фиг.2 - то же, на месте закупорки сосуда. На фиг.3 - то же, в момент раскрытия зонтичного фиксатора. На фиг.4 - то же, в момент раскрытия герметизирующих спаренных баллонов и фиксации фрезерной обрабатывающей головки колебательного типа. На фиг.5 - то же, в момент раскрытия фрезерной обрабатывающей головки колебательного типа в рабочее положение. На фиг.6 - зонтичный фиксатор в транспортном положении, в изометрии, сосуд в сечении. На фиг.7 - то же, в момент раскрытия. На фиг.8 - фрезерная обрабатывающая головка колебательного типа до раскрытия, в изометрии, сосуд в сечении. На фиг.9 - то же, в момент фиксации в месте закупорки сосуда. На фиг.10 - то же, в момент перевода фрезерной обрабатывающей головки колебательного типа в рабочее положение. На фиг.11 - фреза обрабатывающей головки колебательного типа со снятым кожухом. На фиг.12 - схематично изображена атероэктомическая микромашинка с обрабатывающей головкой шнекового типа во время движения к месту закупорки сосуда, в изометрии, сосуд в сечении. На фиг.13 - то же, на месте закупорки сосуда. На фиг.14 - то же, в момент раскрытия зонтичного фиксатора. На фиг.15 - то же, в момент раскрытия герметизирующих спаренных баллонов и фиксации обрабатывающей головки шнекового типа. На фиг.16 - обрабатывающая головка шнекового типа до раскрытия в рабочее положение. На фиг.17 - то же, в рабочем положении. На фиг.18 - шнек обрабатывающей головки шнекового типа со снятым кожухом. На фиг.19 схематично изображена атероэктомическая микромашинка с фрезерной обрабатывающей головкой вращательного типа во время движения к месту закупорки сосуда, в изометрии, сосуд в сечении. На фиг.20 - то же, на месте закупорки сосуда. На фиг.21 - то же, в момент фронтального выдвижения передней направляющей. На фиг.22 - то же, в рабочем положении зонтичного фиксатора, герметизирующих спаренных баллонов и фрезерной обрабатывающей головки вращательного типа. На фиг.23 - фрезерная обрабатывающая головка вращательного типа в сложенном виде. На фиг.24 - то же, в рабочем положении. На фиг.25 - фреза обрабатывающей головки вращательного типа. На фиг.26 схематично изображена атероэктомическая микромашинка с фрезерной обрабатывающей головкой фронтального типа и двумя передними складными поплавкововидными фиксаторами во время движения к месту закупорки сонной артерии, в изометрии, сонная артерия в сечении. На фиг.27 - то же, в момент фиксации заднего двойного зонтичного фиксатора. На фиг.28 - то же, в момент прохождения выдвижных гибких стержней с передними складными поплавкововидными фиксаторами в сложенном состоянии через место закупорки сосуда. На фиг.29 - то же, в момент раскрытия передних складных поплавкововидных фиксаторов в зоне раздвоения сонной артерии. На фиг.30 - задний двойной зонтичный фиксатор в сложенном состоянии. На фиг.31 - то же, в раскрытом состоянии. На фиг.32 - фрезерная обрабатывающая головка фронтального типа в сложенном виде. На фиг.33 - то же, в момент раскрытия фрезерной обрабатывающей головки фронтального типа в рабочее положение. На фиг.34 - передний складной поплавкововидный фиксатор с микросеткой в рабочем положении. На фиг.35 - корпус со шнеком фрезерной обрабатывающей головки фронтального типа. На фиг.36 - многозаходный шнек обрабатывающей головки фронтального типа.
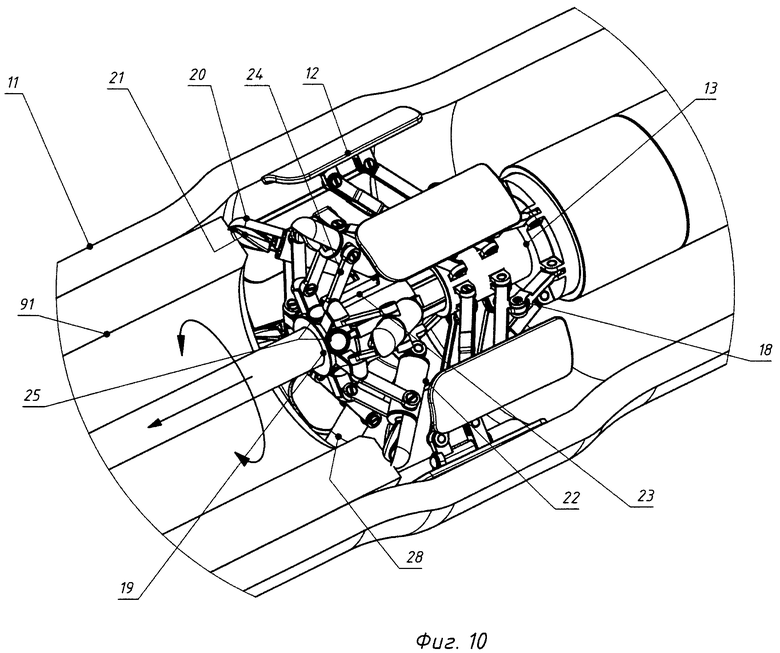
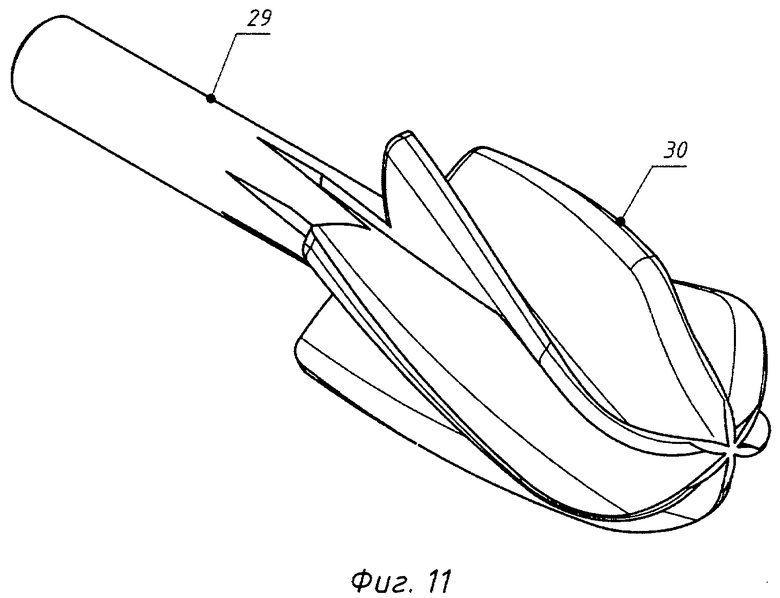
Атероэктомическая микромашинка выполнена в четырех вариантах. В первом варианте исполнения микромашинка (см. фиг.1-11) включает передний и задний зонтичные фиксаторы 1 и 2, передний и задний герметизирующие баллоны 3 и 4 (в предпочтительном варианте выполненные спаренными в передней и задней зонах микромашинки) и расположенную между ними фрезерную обрабатывающую головку 5 маятникового (колебательного) типа. Передний зонтичный фиксатор 1 с гидроцилиндром 6 его раскрытия, передние спаренные герметизирующие баллоны 3 и наконечник 7 корпуса микромашинки расположены на выдвижном штоке с канальным патрубком 8. В задней зоне корпуса микромашинки расположены фиксатор 2, герметизирующие спаренные баллоны 4 и гидроцилиндр 9 раскрытия фиксатора 2. С задней зоной корпуса микромашинки связан шлейф 10, предназначенный для защиты стенок 11 сосуда от расположенных в нем коммуникаций (шлангов, трубопроводов, проводов и т.д.). Расположенная в средней зоне головка 5 установлена с возможностью поступательного перемещения относительно продольной оси микромашинки и включает шарнирно установленные опорные лапы 12, связанные параллелограммным механизмом со штоком 13 гидроцилиндра 14 раскрытия опорных лап 12 с защитным кольцом 15. Корпус с опорными лапами 12 имеет возможность независимого перемещения вдоль продольной оси микромашинки. Параллелограммный механизм опорных лап 12 включает две параллельно расположенные спицы 16 и связанную с гидроцилиндром 14 тягу 17, соединенную с одной из спиц 16 посредством шарнира 18. Спицы 16 могут быть выполнены спаренными для повышения надежности конструкции. Корпус 19 головки 5 установлен с возможностью маятникового (качательного, колебательного) движения вокруг продольной оси микромашинки с амплитудой 45-90°. На подвижном корпусе 19 головки 5 расположен фрезерный механизм, включающий полузакрытые защитными кожухами 20 фрезы 21, установленные под острым углом к продольной оси микромашинки с возможностью вращательного движения вокруг своих продольных осей посредством двигателей 22. Корпусы двигателей 22 связаны в средней зоне поворотными тягами 24 с подвижным корпусом 19 и шарнирно закреплены на корпусе 19 в задней зоне. В корпусе 19 расположен линейный двигатель 23 его продольного перемещения по направляющим канавкам и двигатель маятникового (колебательного) движения головки 5 вокруг продольной оси микромашинки (не показано). Видеокамеры 25 расположены в передней зоне корпуса 19, а элементы 26 освещения (например, светодиодные) установлены на кронштейнах 27 опорных лап 12. Головка 5 снабжена аспирационным механизмом с патрубком 28. Патрубок 28 установлен вместо фрезы 21 в нижней зоне головки 5. Высокоскоростные фрезы 21 выполнены многозаходными и представляют собой набор лезвийных инструментов, установленных на валу 29 и выполненных в виде фрагментов спирали с острыми режущими кромками 30. Передняя торцевая зона лезвийных инструментов выполнена скругленной.
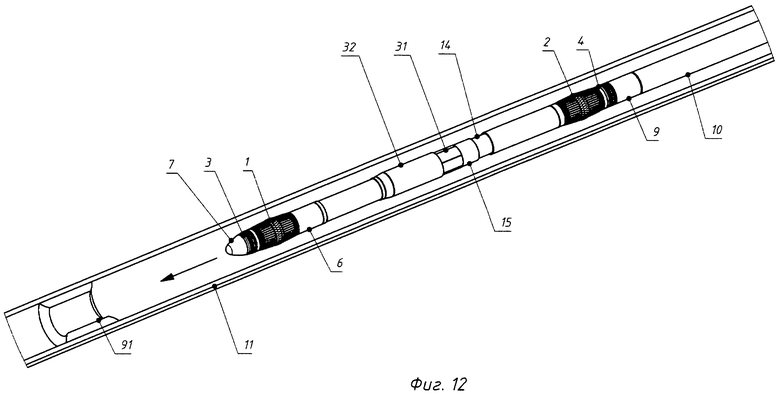
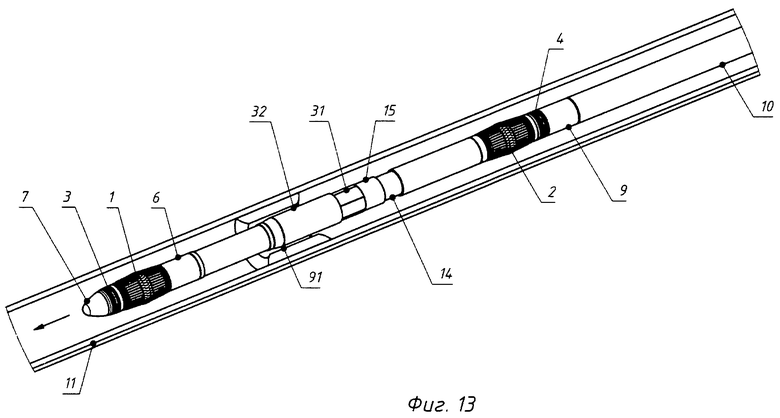
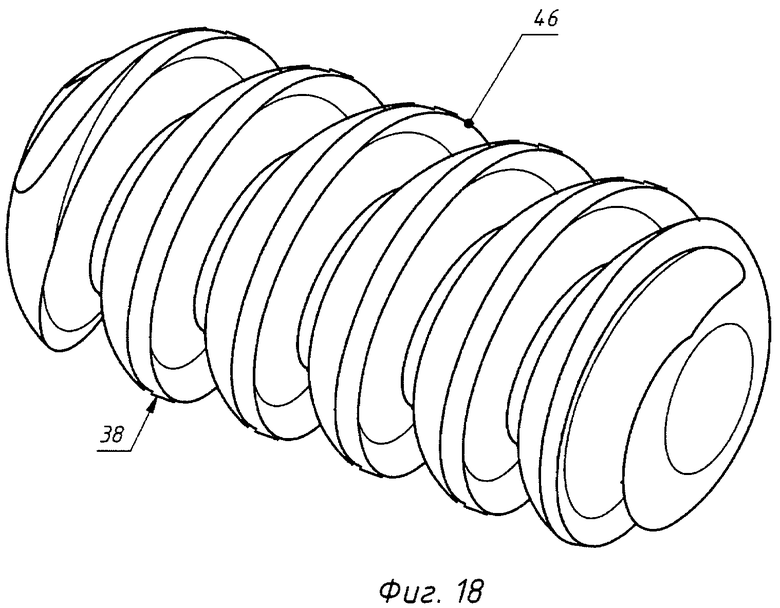
Атероэктомическая микромашинка по второму варианту исполнения (см. фиг.12-18) включает выдвижные передний и задний зонтичные фиксаторы 1 и 2, передние и задние герметизирующие баллоны 3 и 4 (их спаренное выполнение в передней и задней зонах мини-робота повышает надежность герметизации и уменьшение травмоопасности стенок сосудов) и расположенную между ними обрабатывающую головку 31 шнекового типа, выполненную с возможностью поступательного перемещения вдоль продольной оси микромашинки. Передний зонтичный фиксатор 1 с гидроцилиндром 6 его раскрытия и защитной гильзой 32, передние спаренные герметизирующие баллоны 3 и наконечник 7 корпуса микромашинки расположены на выдвижном штоке с изогнутым патрубком 33. В задней зоне корпуса микромашинки расположены фиксатор 2, герметизирующие спаренные баллоны 4 и гидроцилиндр 9 раскрытия фиксатора 2. С задней зоной корпуса микромашинки связан шлейф 10, предназначенный для защиты стенок 11 сосуда от расположенных в нем коммуникаций (шлангов, трубопроводов, проводов и т.д.). Расположенная в средней зоне головка 31 включает шарнирно установленные с возможностью поступательного перемещения относительно продольной оси микромашинки корпус с опорными лапами 12, связанными параллелограммным механизмом со штоком 13 гидроцилиндра 14 раскрытия опорных лап 12 с защитным кольцом 15. Параллелограммный механизм опорных лап 12 включает две параллельно расположенные спицы 16 и связанную с гидроцилиндром 14 тягу 17, соединенную с одной из спиц 16 посредством шарнира 18. Спицы 16 могут быть выполнены спаренными. Головка 31 установлена на монтажном корпусе 34 с возможностью вращения вокруг продольной оси микромашинки и поступательного перемещения относительно продольной оси микромашинки. Головка 31 включает бритвенное устройство 35 шнекового типа, выполненное по принципу безопасной бритвы. Устройство 35 включает расположенный в корпусе 36 с сетчатым окном 37, развернутым в рабочем положении в сторону стенки 11 сосуда, шнек 38, установленный с возможностью вращательного движения вокруг своей продольной оси с приводом от двигателя 39. Корпус 36 бритвенного устройства 35 снабжен параллелограммным механизмом, у которого поворотные спицы 40 связаны со штоком 41 раскрытия головки 31, а спицы 42 установлены на монтажном корпусе 34. Головка 31 снабжена поворотным посредством шарниров 43 и 44 патрубком 45 отвода срезанных частей закупоривающего материала, связанным с внутренней зоной корпуса 36 в его торцевой части. Патрубок 45 связан с выводящим шлангом (не показано). Однозаходный шнек 38 включает навивку с режущей кромкой 46, развернутой в сторону выходного конца шнека 38. Микромашинка по этому варианту исполнения может быть оснащена видеокамерой 25 и элементами освещения 26 (не показано).
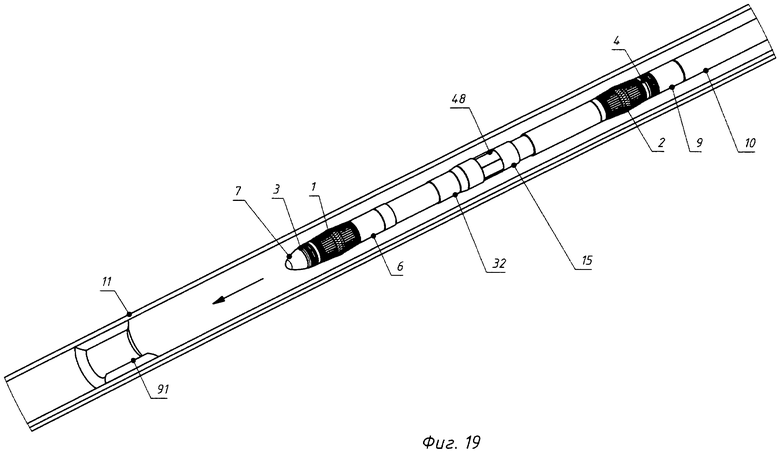
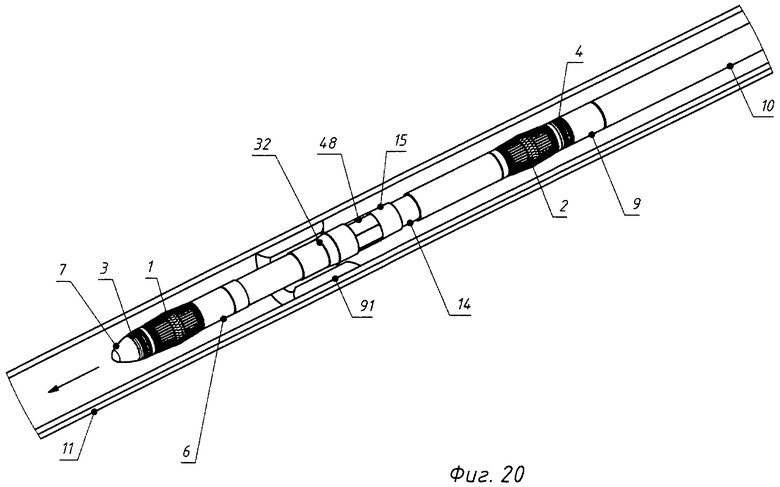
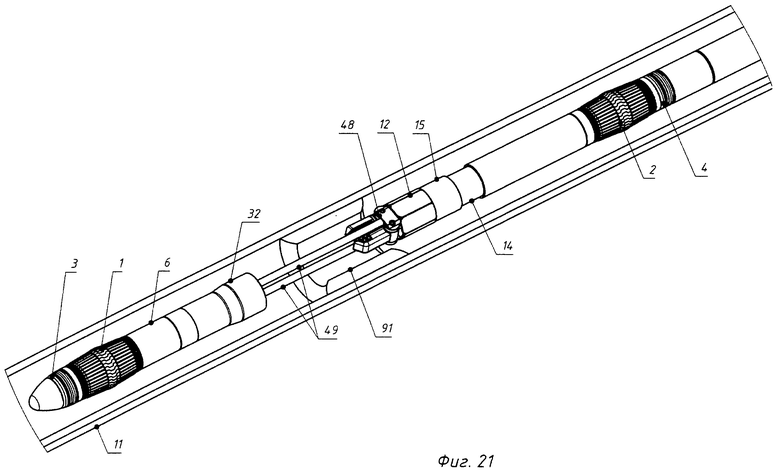
В третьем варианте исполнения атероэктомическая микромашинка (см. фиг.19-25) включает передний и задний зонтичные фиксаторы 1 и 2, передние и задние герметизирующие баллоны 3 и 4 (возможно их спаренное выполнение в передней и задней зонах) и расположенную между ними фрезерную обрабатывающую головку 48 вращательного типа, установленную с возможностью поступательного перемещения относительно продольной оси микромашинки. Передний зонтичный фиксатор 1 с гидроцилиндром 6 его раскрытия и защитной гильзой 32, передние спаренные герметизирующие баллоны 3 и наконечник 7 корпуса микромашинки расположены на выдвижных направляющих полых стержнях 49. В задней зоне корпуса микромашинки расположены фиксатор 2, герметизирующие спаренные баллоны 4 и гидроцилиндр 9 раскрытия фиксатора 2. С задней зоной корпуса микромашинки связан шлейф 10, предназначенный для защиты стенок 11 сосуда от расположенных в нем коммуникаций (шлангов, трубопроводов, проводов и т.д.). Расположенная в средней зоне головка 48 включает шарнирно установленные опорные лапы 12, связанные параллелограммным механизмом со штоком 13 гидроцилиндра 14 раскрытия опорных лап 12 с защитным кольцом 15. Параллелограммный механизм опорных лап 12 включает две параллельно расположенные спицы 16 и связанную с гидроцилиндром 14 тягу 17, соединенную с одной из спиц 16 посредством шарнира 18. Спицы 16 могут быть выполнены спаренными. Головка 48 установлена с возможностью вращения вокруг продольной оси микромашинки и поступательного перемещения относительно этой же продольной оси. Головка 48 включает высокоскоростной лезвийный инструмент, расположенный в защитном кожухе 50 с окном 51 с возможностью вращения вокруг своей продольной оси. Лезвийный инструмент с защитным кожухом 50 выполнены поворотными вокруг шарнира 52 монтажного штока 53 с возможностью раскрытия в рабочее положение. Причем в рабочем положении они расположены под острым углом к продольной оси микромашинки, при этом окно 51 направлено вперед и расположено под углом к плоскости движения головки 48 таким образом, что стенок сосуда может касаться только торцевая закрытая часть 54 кожуха 50. Лезвийный инструмент, расположенный в кожухе 50, включает лезвия 55, выполненные в виде продольно развернутых фрагментов спирали, острие которых направлено под углом к фронтальной плоскости. Двигатель 56 лезвийного инструмента расположен в полой внутренней зоне лезвийного инструмента, а лезвия 55 закреплены на каркасе, выполненном из набора колец 57. Диаметрально противоположно относительно продольной оси микромашинки расположено установленное на монтажном штоке 53 поворотное относительно шарнира 58 аспирационное устройство 59, включающее корпус 60 патрубка с защитным козырьком 61, направленным в рабочем положении головки 48 в сторону стенок сосуда. Окно 62 аспирационного устройства 59 расположено фронтально в рабочем положении под острым углом к плоскости движения головки 48 вдоль сосуда и закрыто защитной сеткой.
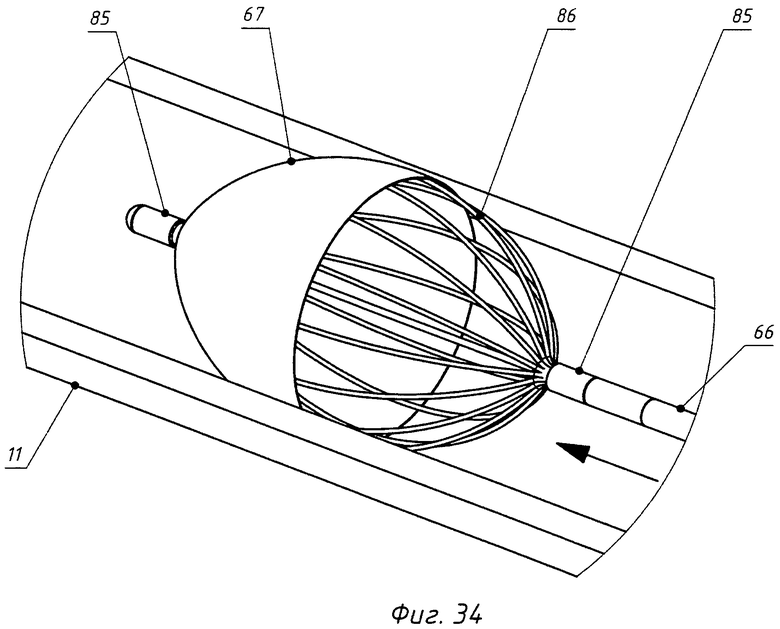
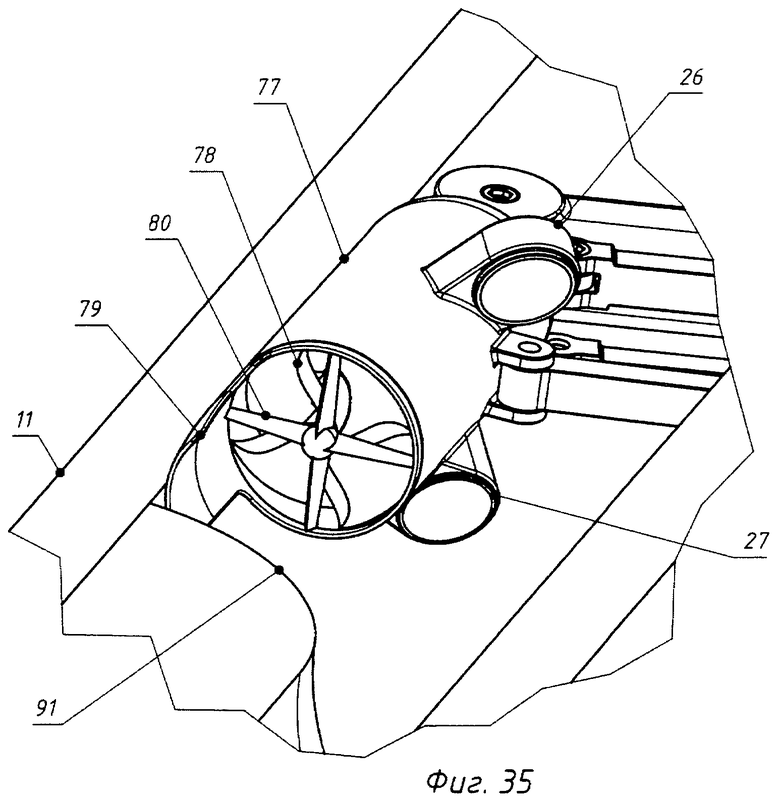
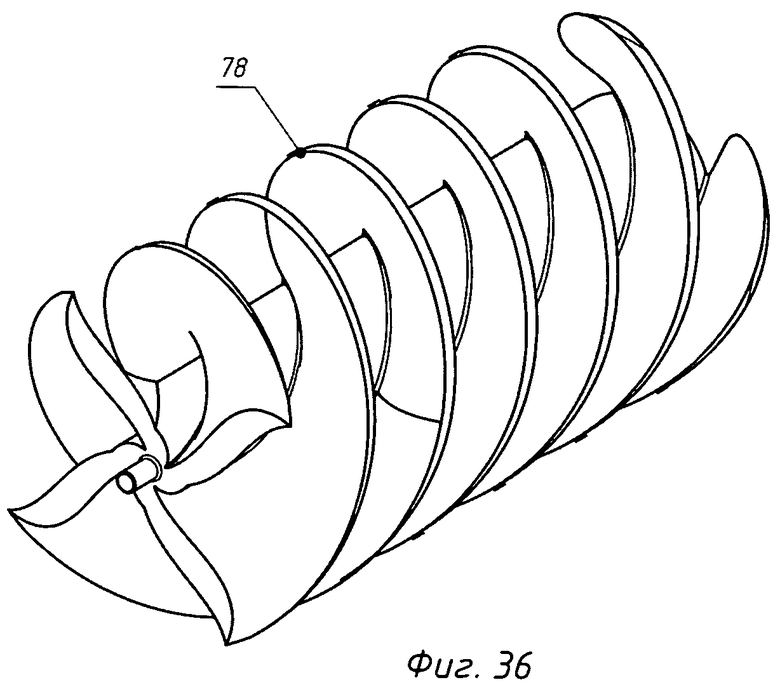
Атероэктомическая микромашинка по четвертому варианту исполнения, предназначенная для удаления закупоривающего материала из сонной артерии (см. фиг.26-35), включает передние складные поплавкововидные фиксаторы 64 и 65, закрепленные на передних концах выдвижных гибких полых стержней 66. Фронтальная поверхность фиксаторов 64 и 65 закрыта защитными микросетками 67. В задней зоне микромашинки расположен двойной зонтичный фиксатор 68 и 69. Фиксатор 68 оснащен гидроцилиндром 70 его раскрытия, расположенным перед фиксатором 68 по ходу движения микромашинки, а фиксатор 69 оснащен гидроцилиндром 71 его раскрытия, расположенным позади фиксатора 69 по ходу движения микромашинки. Позади фиксатора 69 расположены спаренные герметизирующие баллоны 3, связанные со шлейфом 10. На консольном монтажном основании 72 вала 73 корпуса 74 микромашинки с защитной гильзой 75 установлена фрезерная обрабатывающая головка 76 фронтального типа с возможностью возвратно-поступательного движения относительно продольной оси микромашинки. Головка 76 включает два диаметрально расположенных на валу 73 цилиндрических корпуса 77 с размещенными внутри четырехзаходными шнеками 78. В рабочем положении корпусы 77 расположены продольно по направлению движения микромашинки с возможностью прилегания к стенкам 11 сосуда. Корпусы 77 снабжены заборными лопатками 79, являющимися продолжением корпуса 77 в зоне прилегания к стенкам 11 сосуда. Секторные ножи 80 закреплены неподвижно во фронтальной плоскости переднего окна корпуса 77 и закрыты со стороны стенок 11 сосуда лопатками 79. Поворотные спицы 81 параллелограммного механизма перемещения корпусов 77 в рабочее положение связаны со штоком 82, а поворотные спицы 83 связаны с монтажным основанием 72. В заднем торце корпуса 77 расположен поворотный относительно монтажного основания 72 и корпуса 77 патрубок 84 аспирационного устройства, связанный с транспортировочным шлангом (не показано). Видеокамеры 26 и элементы 27 освещения могут быть установлены на корпусах 77 головки 76. Складные поплавкововидные фиксаторы 64 и 65 включают расположенные на втулках 85 складные спицы 86, закрытые в передней зоне микросетками 67. Втулки 85 связаны упругим тросом.
Зонтичные фиксаторы 1, 2, 68 и 69 во всех вариантах выполнения состоят из опорных площадок 87, связанных спицами 88 и 89, шарнирно закрепленными на противоположных концах опорных площадок 87, с разнесенными ободками 90. Причем один из ободков 90 связан с гидроцилиндром раскрытия либо 9, либо 70, либо 71 в зависимости от варианта выполнения микромашинки.
Способы удаления закупоривающего материла, реализованные с помощью атероэктомических микромашинок, заключаются в следующем. Вхождение микромашинки в кровеносную систему можно осуществлять известным методом, например через бедренную артерию. Движение микромашинки по сосудистому руслу контролируют встроенной в микромашинку видеокамерой 25, а также внешними средствами, например УЗИ. В первом, втором и третьем вариантах исполнения атероэктомических микромашинок при достижении микромашинкой закупоривающего материла в сосуде ее фиксируют посредством переднего зонтичного фиксатора 1, продвигая наконечник 7 со спаренными герметизирующими баллонами 3 и фиксаторами 1 за пределы закупоривающего материала благодаря выдвижному канальному патрубку 8, в котором находятся все коммуникации для управления баллонами 3 и фиксатором 1, и раскрывая фиксатор 1. Одновременно либо последовательно раскрывают задний фиксатор 2. Благодаря использованию переднего фиксатора 1 и заднего фиксатора 2 среднюю часть микромашинки с обрабатывающей головкой 5, 31 или 48 надежно фиксируют в зоне обработки. Далее очень важно в зоне обработки закупоривающего материала раскрыть опорные лапы 12 до упора опорных площадок 87 в стенки 11 сосуда. Лапы 12 предназначены для обеспечения безопасности сосуда во время обработки, например, атероматозной бляшки 91. Они должны во время работы обрабатывающей головки 5, 31 или 48 прикрывать ее сзади и сверху. В микромашинке предусмотрено, что лапы 12 либо автоматически передвигаются поступательно вслед за обрабатывающей головкой 5, 31 или 48 (для нехрупких и неповрежденных сосудов). Либо периодически лапы 12 складывают, передвигают вплотную к головке 5, 31 или 48 и опять раскрывают. На время перемещения сложенных лап 12 головку 5, 31 или 48 выключают. В случае, когда место поражения закупоривающим материалом надо ограничить от кровотока, надувают герметизирующие баллоны 3 и 4. С помощью аспирационного устройства откачивают из зоны обработки кровь и подают в эту зону ее прозрачные аналоги, например искусственную кровь или другие кровезаменители.
При использовании фрезерной обрабатывающей головки 5 колебательного типа (см. фиг.10) фрезы 21 подводят к торцевой зоне бляшки 91 и производят посекторное маятниковое фрезерование закупоривающего материала, обеспечивающее независимое удаление срезанных частиц атероматозного материала из каждого сектора режущей кромкой 30 отдельной высокоскоростной фрезы 21, каждая из которых установлена на общей головке 5. Благодаря выполнению фрезы 21 многозаходной, состоящей из набора лезвийных инструментов, выполненных из фрагментов спирали, режущая кромка 30 срезает тончайшие частицы, а фрагмент спирали мгновенно отводит срезанный материал в сторону патрубка 28 аспирационной системы. Маятниковое (качательное, колебательное) движение головки 5 вокруг продольной оси микромашинки обеспечивает не только секторную обработку бляшки 91, но и частичное перекрытие зон обработки соседними фрезами 21. Что исключает наличие остаточного материала в зоне обработки. При этом головка 5 движется поступательно вдоль сосуда (вдоль бляшки 91) до конца расположения закупоривающего материала. Этот способ и микромашинку по первому варианту исполнения целесообразно использовать в особо сложных случаях, когда бляшка 91 состоит из рыхлого вязкого материала.
При использовании обрабатывающей головки 31 шнекового типа (см. фиг.17) производят плавное щадящее расширение просвета сосуда путем послойного кругового снятия закупоривающего материала от центра сосуда к его периферии. Достигают такого эффекта благодаря выполнению головки 31 в виде бритвенного устройства 35 шнекового типа. Устройство 35 включает корпус 36 с сетчатым окном 37 и расположенный в корпусе 36 шнек 38 с однозаходной навивкой, оснащенной режущей кромкой 46. Устройство 35 располагают вдоль стенки 11 сосуда и плавно подводят к проксимальной зоне бляшки 91. При вращении головки 31 продольно расположенное вдоль стенки 11 сосуда устройство 35 совершает вращение вокруг продольной оси микромашинки, постепенно снимая слои закупоривающего материала от центра к периферии. Происходит снятие бляшки 91 следующим образом: частицы закупоривающего материала, продавленные сквозь сетчатое окно 37 внутрь корпуса 36, разделяются сеткой на мельчайшие капельки, режущая кромка 46 их обрезает, а шнек 38 направляет к патрубку 45 аспирационной системы. Такой щадящий способ атероэктомии и использование микромашинки второго варианта исполнения позволяют удалять закупоривающий материал в ситуации, когда расширение сосудистого просвета надо производить очень осторожно. В случае, когда бляшка 91 превышает размеры устройства 35, его останавливают после очищения просвета сосуда, складывают и передвигают дальше в сторону неудаленного атероматозного материала. Фиксируют в рабочем положении и включают обрабатывающую головку 31.
Использование фрезерной обрабатывающей головки 48 вращательного типа (см. фиг.24) дает возможность осуществить быстрое удаление закупоривающего материала из сосуда. После раскрытия головки 48 производят торцевое скоростное круговое фрезерование закупоривающего материала посредством сложения двух круговых составляющих: вращения лезвийного инструмента в кожухе 50 вокруг своей оси и вращения головки 48 вокруг продольной оси микромашинки. Поступательное движение вращающейся головки 48 вдоль продольной оси микромашинки во время обработки бляшки 91 обеспечивает послойное торцевое снятие частиц атероматозного материала, а противоположно расположенный патрубок аспирационного устройства 59 осуществляет одновременное их удаление, т.к. вращается в ту же сторону, что и лезвийный инструмент.
Благодаря тому что обрабатывающие головки 5, 31 и 48 надежно зафиксированы в месте расположения закупоривающего материала, исключается травмирование стенок 11 сосуда, а опорные лапы 12 дополнительно защищают сосуд от повреждений во время работы обрабатывающих головок 5, 31 и 48. Такая конструкция обеспечивает высокую точность доставки головки 5, 31 или 48 к месту расположения бляшки 91, позволяет предварительно расположить обрабатывающий инструмент непосредственно рядом с бляшкой 91 и начинать работу устройства только после точной его ориентировки в сосуде и надежной фиксации на месте.
Следующий способ удаления закупоривающего материла, предназначенный для обработки сонной артерии (см. фиг.35), включает доставку атероэктомической микромашинки к месту расположения атероматозного материала и ее фиксацию посредством раскрытия двойного зонтичного фиксатора 68 и 69, продвижение передних складных поплавкововидных фиксаторов 64 и 65 через место расположения бляшки 91 и через место раздвоения сонной артерии с помощью гибких полых стержней 66 и их фиксацию посредством раскрытия складных спиц 86. Когда каждый поплавкововидный фиксатор 64 и 65 закреплен в сосудах за местом разветвления сонной артерии, то дистально расположенные на фиксаторах 64 и 65 защитные микросетки 67 исключают попадание частиц атероматозного материала в эти сосуды во время и после обработки бляшки 91. Затем консольно закрепленную посредством задних фиксаторов 68 и 69 фрезерную обрабатывающую головку 76 фронтального типа подводят к месту расположения бляшки 91, с помощью параллелограммного механизма корпуса 77 поднимают в рабочее положение до упора заборных лопаток 79 своей тыльной плоскостью в стенки 11 артерии. Затем включают четырехзаходный шнек 78 и начинают плавно продвигать головку 76 в продольном направлении вдоль бляшки 91. При этом обработку атероматозного материала производят червячным принципом путем вырезания продольных канавок в бляшке 91. После достижения дистального конца бляшки 91 головку 76 возвращают к проксимальному концу бляшки 91 (при необходимости во время возвратного движения головку 76 можно сложить), затем головку 76 поворачивают на несколько градусов, подводя секторные ножи 80 к необработанному смежному участку бляшки 91, и повторяют операции до тех пор, пока не будет удален весь атероматозный материал. Гибкие полые стержни 66 не препятствуют развороту головки 76, немного скручиваясь по спирали в сторону поворота головки 76. Во время работы головки 76 неподвижными секторными ножами 80 и заборными лопатками 79 давят на проксимальный конец бляшки 91. При этом лопатками 79 отделяют бляшку 91 от стенок 11 артерии, а частицы бляшки 91, разделенные ножами 80 на части, отделяют острыми кромками шнека 78 и быстро отводят назад к патрубку 84 аспирационного устройства. При случайном попадании частиц отделенного атероматозного материала в кровоток их задерживают микросеткой 67 фиксаторов 64 и 65. По завершении процесса срезания бляшки 91 головку 76 складывают, затем складывают поплавкововидные фиксаторы 64 и 65, зажимая попавшие на микросетку 67 частицы, втягивают фиксаторы 64 и 65 с полыми стержнями 66 внутрь защитной гильзы 75, складывают фиксаторы 68 и 69 и удаляют в том же порядке, как вводили микромашинку. Такой способ обработки закупоривающего материала в сонной артерии позволяет не останавливать кровоток, при этом обеспечивая безопасность пациента.
Каждый вариант исполнения микромашинки и каждый вариант способа удаления закупоривающего материала направлены на решение обособленных задач, связанных со спецификой состояния пациента, его сосудов и бляшек 91. Однако конструкция микромашинок позволяет их использовать и в других случаях, обеспечивая безопасность работы и возможность быстрого эффективного удаления атероматозного материала.
Таким образом, технический результат, достигаемый с использованием заявленного изобретения, заключается в повышении точности доставки атероэктомической машинки к месту обработки, ее позиционирования и фиксации, повышении эффективности удаления закупоривающего материала за счет высокой безопасности процесса удаления за счет высокой точности движения обрабатывающей головки и используемых инструментов в зоне обработки и уменьшении степени травматичности сосудов при использовании системы дистанционного управления в сочетании с компьютерным отслеживанием процесса при увеличенных размерах зоны обработки.
Группа изобретений относится к медицине, в частности к сердечно-сосудистой хирургии. Выполняют транспортировку атероэктомической микромашинки к месту расположения закупоривающего материала в сосуде. Осуществляют позиционирование и фиксацию атероэктомической микромашинки при использовании видеодатчика для мониторинга движения атероэктомической машинки и состояния сосуда. Выполняют разрушение закупоривающего материала и выведение продуктов обработки из сосуда, при этом фиксацию микромашинки производят в ее дистальной и проксимальной областях с последующей фиксаций обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала. Разрушение закупоривающего материала производят различными приемами в зависимости от использованной вида атероэктомической микромашинки. Атероэктомическая микромашинка содержит средство перемещения, средство контроля с видеодатчиком, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки. При этом машинка снабжена дистально и проксимально расположенными на ней средствами герметизации. Средство фиксации выполнено в виде зонтичных фиксаторов. Средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки, корпус которой установлен с возможностью маятникового движения вокруг продольной оси микромашинки и поступательного перемещения относительно этой оси. При этом обрабатывающая головка снабжена различными фрезами, в зависимости от вида машинки. Группа изобретений позволяет провести наиболее эффективное удаление закупоривающего материала из сосуда за счет использования системы многоуровневой фиксации микромашинки, уменьшая риск травмирования стенок сосуда за счет точного продвижения микромашинки в сосудах. 8 н. и 21 з.п. ф-лы, 36 ил.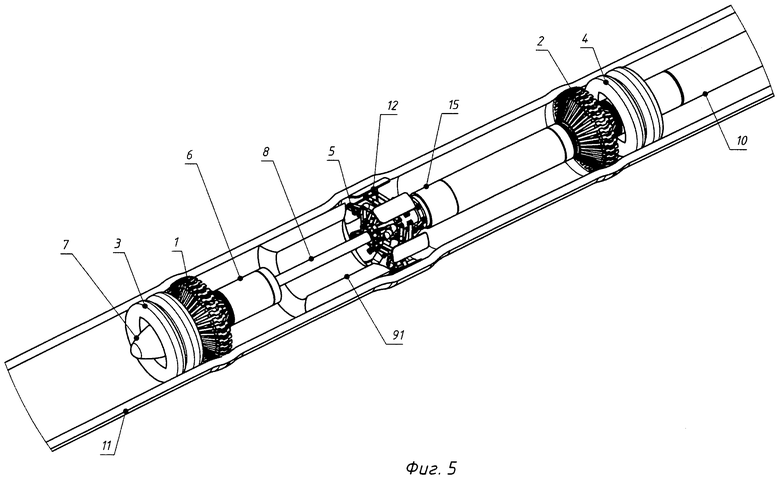
1. Способ удаления закупоривающего материала, включающий транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сосуде, позиционирование и фиксацию атероэктомической микромашинки при использовании видеодатчика для мониторинга движения атероэктомической машинки и состояния сосуда, разрушение закупоривающего материала и выведение продуктов обработки из сосуда, отличающийся тем, что фиксацию атероэктомической машинки, выполненной по п.11, производят в ее дистальной и проксимальной областях с последующей фиксаций обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, а разрушение закупоривающего материала производят посекторно посредством одновременной поступательной продольной обработки маятниковыми фрезами, качающимися вокруг продольной оси.
2. Способ по п.1, отличающийся тем, что сбор продуктов обработки осуществляют в нижней зоне сосуда, а их выведение производят посредством аспирационного устройства.
3. Способ по п.1, отличающийся тем, что после фиксации атероэктомической микромашинки осуществляют герметизацию зоны обработки закупоривающего материала, удаляют из зоны обработки кровь и подают в эту зону ее искусственный прозрачный аналог.
4. Способ удаления закупоривающего материала, включающий транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сосуде, позиционирование и фиксацию атероэктомической микромашинки при использовании видеодатчика для мониторинга движения атероэктомической микромашинки и состояния сосуда, разрушение закупоривающего материала и выведение продуктов обработки из сосуда, отличающийся тем, что фиксацию атероэктомической машинки, выполненной по п.17, производят в ее дистальной и проксимальной областях с последующей фиксаций обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, при этом производят плавное щадящее расширение просвета сосуда путем послойного кругового снятия закупоривающего материла от центра сосуда к его периферии.
5. Способ по п.4, отличающийся тем, что сбор и выведение продуктов обработки производят непосредственно в зоне обработки закупоривающего материала.
6. Способ по п.4, отличающийся тем, что после фиксации атероэктомической микромашинки осуществляют герметизацию зоны обработки закупоривающего материала, удаляют из зоны обработки кровь и подают в эту зону ее искусственный прозрачный аналог.
7. Способ удаления закупоривающего материала, включающий транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сосуде, позиционирование и фиксацию атероэктомической микромашинки при использовании видеодатчика для мониторинга движения атероэктомической машинки и состояния сосуда, разрушение закупоривающего материала и выведение продуктов обработки из сосуда, отличающийся тем, что фиксацию атероэктомической машинки, выполненной по п.23, производят в ее дистальной и проксимальной областях с последующей фиксацией обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, при этом производят послойное торцевое скоростное круговое фрезерование закупоривающего материала посредством сложения двух круговых составляющих, включающих вращение лезвийного инструмента вокруг своей оси и вращение обрабатывающей головки вокруг продольной оси микромашинки.
8. Способ по п.7, отличающийся тем, что сбор и выведение продуктов обработки осуществляют посредством вращающегося патрубка аспирационного устройства.
9. Способ по п.7, отличающийся тем, что после фиксации атероэктомической микромашинки осуществляют герметизацию зоны обработки закупоривающего материала, удаляют из зоны обработки кровь и подают в эту зону ее искусственный прозрачный аналог.
10. Способ удаления закупоривающего материала, включающий транспортирование атероэктомической микромашинки к месту расположения закупоривающего материала в сонной артерии, позиционирование и фиксацию атероэктомической микромашинки при использовании видеодатчика для мониторинга движения атероэктомической машинки и состояния сосуда, разрушение закупоривающего материала и выведение продуктов обработки из сонной артерии, отличающийся тем, что фиксацию атероэктомической машинки, выполненной по п.26, производят консольно в ее проксимальной области, затем продвигают сложенные фиксаторы через зону разветвления сонной артерии и их фиксируют в ее ветвях, причем осуществляют дополнительную фиксацию обрабатывающей головки непосредственно в зоне разрушения закупоривающего материала, при этом разрушение закупоривающего материала производят червячным принципом путем последовательного вырезания в нем продольных канавок.
11. Атероэктомическая микромашинка, включающая средство перемещения, средство контроля с видеодатчиком, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, отличающаяся тем, что машинка снабжена дистально и проксимально расположенными на ней средствами герметизации, а средство фиксации выполнено в виде зонтичных фиксаторов, расположенных в дистальной и проксимальной зонах микромашинки, а средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки, корпус которой установлен с возможностью маятникового движения вокруг продольной оси микромашинки и поступательного перемещения относительно этой оси, причем обрабатывающая головка снабжена фрезерным механизмом, выполненным в виде полузакрытых защитными кожухами фрез, расположенных под острым углом к продольной оси микромашинки, при этом обрабатывающая головка снабжена средством дополнительной фиксации, выполненным в виде шарнирно установленных в зоне непосредственной обработки закупоривающего материала складывающихся опорных лап.
12. Микромашинка по п.11, отличающаяся тем, что средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено патрубком отбора, расположенным в нижней зоне обрабатывающей головки.
13. Микромашинка по п.11, отличающаяся тем, что фрезы обрабатывающей головки выполнены многозаходными в виде лезвийных инструментов, состоящих из фрагментов спирали с острыми режущими кромками со скруглением в торцевой зоне.
14. Микромашинка по п.11, отличающаяся тем, что складывающиеся опорные лапы снабжены параллелограммным механизмом раскрытия и тягой, связанной с приводом раскрытия.
15. Микромашинка по п.11, отличающаяся тем, что фрезы обрабатывающей головки снабжены двигателями, расположенными с фрезами в общем корпусе, связанными в средней зоне поворотными тягами с корпусом обрабатывающей головки и шарнирно закрепленными на корпусе обрабатывающей головки в задней зоне.
16. Микромашинка по п.11, отличающаяся тем, что средство герметизации выполнено в виде надувных баллонов.
17. Атероэктомическая микромашинка, включающая средство перемещения, средство контроля с видеодатчиком, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, отличающаяся тем, что машинка снабжена дистально и проксимально расположенными на ней средствами герметизации, а средство фиксации выполнено в виде зонтичных фиксаторов, расположенных в дистальной и проксимальной зонах микромашинки, а средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки, установленной с возможностью вращения вокруг продольной оси микромашинки и поступательного перемещения относительно этой оси и включающей продольно расположенное бритвенное устройство шнекового типа, включающее корпус с сетчатым окном, развернутым в рабочем положении в сторону стенки сосуда, при этом обрабатывающая головка снабжена средством дополнительной фиксации, выполненным в виде шарнирно установленных в зоне непосредственной обработки закупоривающего материала складывающихся опорных лап.
18. Микромашинка по п.17, отличающаяся тем, что средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено патрубком отбора, расположенным в задней торцевой зоне бритвенного устройства шнекового типа.
19. Микромашинка по п.17, отличающаяся тем, что бритвенное устройство шнекового типа снабжено однозаходным шнеком.
20. Микромашинка по п.17, отличающаяся тем, что складывающиеся опорные лапы снабжены параллелограммным механизмом раскрытия и тягой, связанной с приводом раскрытия.
21. Микромашинка по п.17, отличающаяся тем, что корпус снабжен параллелограммным механизмом раскрытия.
22. Микромашинка по п.17, отличающаяся тем, что средство герметизации выполнено в виде надувных баллонов.
23. Атероэктомическая микромашинка, включающая средство перемещения, средство контроля с видеодатчиком, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, отличающаяся тем, что машинка снабжена дистально и проксимально расположенными на ней средствами герметизации, а средство фиксации выполнено в виде зонтичных фиксаторов, расположенных в дистальной и проксимальной зонах микромашинки, а средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки, корпус которой установлен с возможностью вращательного движения вокруг продольной оси микромашинки и поступательного перемещения относительно этой оси, причем обрабатывающая головка снабжена поворотным лезвийным инструментом, расположенным под острым углом к продольной оси микромашинки в кожухе с открытым в сторону расположения закупоривающего материала окном и выполненным в виде продольно развернутых фрагментов спирали с острием, направленным под углом к фронтальной плоскости, при этом обрабатывающая головка снабжена средством дополнительной фиксации, выполненным в виде шарнирно установленных в зоне непосредственной обработки закупоривающего материала складывающихся опорных лап, при этом средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено поворотным патрубком отбора, расположенным диаметрально относительно лезвийного инструмента.
24. Микромашинка по п.23, отличающаяся тем, что складывающиеся опорные лапы снабжены параллелограммным механизмом раскрытия и тягой, связанной с приводом раскрытия.
25. Микромашинка по п.23, отличающаяся тем, что средство герметизации выполнено в виде надувных баллонов.
26. Атероэктомическая микромашинка, включающая средство перемещения, средство контроля с видеодатчиком, средство фиксации микромашинки, средство обработки закупоривающего материала и средство удаления продуктов обработки, отличающаяся тем, что средство фиксации снабжено элементами установки в зоне разветвления сонной артерии, выполненными в виде двух поплавкововидных складных фиксаторов, снабженных микросетками в дистальной зоне и закрепленных на передних концах выдвижных полых стержней, и двойным зонтичным фиксатором, расположенным в задней зоне микромашинки, причем средство обработки закупоривающего материала выполнено в виде складывающейся обрабатывающей головки фронтального типа с корпусом, установленным с возможностью возвратно-поступательного движения относительно продольной оси микромашинки и с возможностью пошагового поворота относительно этой оси, при этом обрабатывающая головка выполнена в виде двух шнеков, диаметрально расположенных в корпусах с торцевыми окнами, снабженными неподвижно закрепленными в них секторными ножами и заборными лопатками, расположенными над торцевыми окнами в передней зоне корпуса со стороны прилегания к стенкам артерии в раскрытом положении.
27. Микромашинка по п.26, отличающаяся тем, что шнеки обрабатывающей головки выполнены четырехзаходными с острыми кромками во входной зоне.
28. Микромашинка по п.26, отличающаяся тем, что корпуса шнеков обрабатывающей головки снабжены параллелограммным механизмом складывания, связанным с корпусом обрабатывающей головки.
29. Микромашинка по п.26, отличающаяся тем, что средство удаления продуктов обработки выполнено в виде аспирационного устройства и снабжено патрубками отбора, расположенными в задней торцевой зоне корпусов шнеков обрабатывающей головки.
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗАКУПОРКИ В СОСУДЕ (ВАРИАНТЫ), СПОСОБ УДАЛЕНИЯ ЗАКУПОРКИ ИЗ СОСУДА, СПОСОБ ОБРАБОТКИ ЗАКУПОРКИ В СОСУДЕ | 1992 |
|
RU2093087C1 |
| ШУМОГЛУШАЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2303151C1 |
| US 2010094320 А, 15.04.2010 | |||
| ШИПОВСКИЙ В.Н | |||
| и др | |||
| Механическая атероэктомия из подколенной артерии с использованием устройства silverhawk (клиническое наблюдение) | |||
| - Радиология - диагностика и интервенция, 2010, том 4, №2, с.57-63 | |||
| ПАВЛОВ П.И | |||
| Первый опыт применения ротационной | |||

